Embed Size (px)
Citation preview

Nonlinear Processes in Two-Fluid Plasmas
Ryusuke Numata
December, 2003
Graduate School of Frontier Sciences,
The University of Tokyo

Contents
1 Introduction 1
2 Hall Magnetohydrodynamics and Equilibrium 11
2.1 Hall Magnetohydrodynamic Equations . . . . . . . . . . . . . 12
2.2 Magnetohydrodynamic Waves in Homogeneous Plasmas . . . . 18
2.3 Double Beltrami Equilibrium . . . . . . . . . . . . . . . . . . 20
2.4 Relaxation Process . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4.1 Conservation Laws . . . . . . . . . . . . . . . . . . . . 24
2.4.2 Variational Principle . . . . . . . . . . . . . . . . . . . 26
2.5 Force-Free Equilibrium . . . . . . . . . . . . . . . . . . . . . . 28
2.5.1 Eigenvalue Problem of the Curl Operator . . . . . . . . 28
2.5.2 Minimum Energy State . . . . . . . . . . . . . . . . . . 30
3 Nonlinear Simulation 39
i

3.1 Simulation Code . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.1.1 Discretization and Time Integration . . . . . . . . . . . 40
3.1.2 Stability Analysis . . . . . . . . . . . . . . . . . . . . . 44
3.1.3 Numerical Smoothing . . . . . . . . . . . . . . . . . . . 46
3.2 Simulation Model . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 Nonlinear Simulation . . . . . . . . . . . . . . . . . . . . . . . 48
3.3.1 Initial Condition and Parameters . . . . . . . . . . . . 48
3.3.2 Relaxed State . . . . . . . . . . . . . . . . . . . . . . . 49
3.3.3 Relaxation Process . . . . . . . . . . . . . . . . . . . . 50
3.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4 Nonlinear Mechanism of Collisionless Resistivity 65
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.2 Model Equations . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3 Single Particle Dynamics . . . . . . . . . . . . . . . . . . . . . 71
4.3.1 Chaotic Orbit . . . . . . . . . . . . . . . . . . . . . . . 71
4.3.2 Lyapunov Exponents . . . . . . . . . . . . . . . . . . . 72
4.4 Statistical Distribution and Macroscopic Resistivity . . . . . . 74
4.4.1 Velocity Distribution . . . . . . . . . . . . . . . . . . . 74
4.4.2 Effective Resistivity . . . . . . . . . . . . . . . . . . . . 75
ii

4.5 Fast Magnetic Reconnection . . . . . . . . . . . . . . . . . . . 78
4.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5 Concluding Remarks 95
iii

List of Figures
1.1 Energy spectrum. (a) Kolmogorov spectrum (b) spectrum of
dual cascade in two-dimensional turbulence. . . . . . . . . . . 9
1.2 Speedup trend of computers. . . . . . . . . . . . . . . . . . . . 10
2.1 Energy of the force-free solution in a cylinder. The arrows in-
dicate the direction of increasing λa. The solid line shows the
(m,n) = (0, 0) mode and the dotted lines show the discrete
eigenmodes satisfying the boundary condition (the aspect ra-
tio = 3). The lowest magnetic energy state is the axisymmetric
state for H ≤ 8.30, and the helical state of the mode (1, 3) for
H > 8.30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
iv

2.2 Typical structures of the force-free state in a cylindrical geom-
etry. Figures show the isosurface and the contour plot in the
poloidal cross section of Bz. (a) is the minimum energy state,
which corresponds to (m,n) = (1, 4), (b) is the higher energy
eigenstate of (m,n) = (2, 5). . . . . . . . . . . . . . . . . . . . 38
3.1 Amplification factors of the FTCS and the Runge-Kutta-Gill
scheme. Stability condition demands |G(k∆x)| ≤ 1 for any k. 53
3.2 Smoothing functions defined by (3.25). To suppress com-
pletely the grid scale errors (k∆x = π), α must be chosen to
0.5 for the second order smoothing, and 0.375 for the fourth
order smoothing. . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3 Dispersion relation of the Alfven whistler wave (2.40). ε = 0
corresponds to the shear Alfven wave, fast/slow mode indi-
cated by +/− shows the electron/ion mode. . . . . . . . . . . 55
3.4 Initial condition of the magnetic field with (n1, n2) = (3, 3).
Columns show the isosurfaces of the magnetic field. . . . . . . 56
3.5 Isosurfaces of the toroidal magnetic field at time 30τA, 60τA,
90τA,120τA for ε = 0.1. . . . . . . . . . . . . . . . . . . . . . 57
v

3.6 Isosurfaces of the toroidal magnetic field at time 30τA, 60τA,
90τA,120τA for ε = 0.0. . . . . . . . . . . . . . . . . . . . . . 58
3.7 Time evolution of energies. The time scale of relaxation is
faster in the Hall-MHD than in the MHD. . . . . . . . . . . . 59
3.8 Time evolution of kinetic energy. Left panel shows the abso-
lute value of the total, the parallel/perpendicular component
of kinetic energies. Right panel shows the percentages of the
parallel/perpendicular components to the total kinetic energy. 60
3.9 Snapshots of the distribution of the alignment coefficients in
the Beltrami condition a, b, which correspond to electron and
ion. Electron motion aligns well to its corresponding vorticity,
while ion flow deviates from its vorticity outside the magnetic
columns. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.10 Snapshot of pressure and velocity distribution in the poloidal
cross section. Dynamic pressure is much less than static pres-
sure because of large initial beta. . . . . . . . . . . . . . . . . 62
vi

3.11 Time evolution of energy (E), helicities (H1, H′2) and enstro-
phy (F ′). H ′2 decrease faster than E. H1 keeps its conservation
better than E and H ′2. F ′ initially grows because F ′ is not a
constant of motion. . . . . . . . . . . . . . . . . . . . . . . . . 63
3.12 Spectrum of magnetic energy and magnetic helicity. Energy
cascades down to high wavenumber modes, and helicity cas-
cade up to low wavenumber modes. . . . . . . . . . . . . . . . 64
4.1 A Y-shape magnetic field with ` ≡ `y/`x = 2 projected onto
the x-y plane. (x and y coordinates are normalized to the
system size `x). The chaos region (hatched region) is defined
by using the local Lyapunov exponents in Sec. 4.3.2. . . . . . 85
4.2 Typical particle orbit in a Y-shape magnetic field with ` = 1.
Dotted line shows the asymptotic line of the magnetic field.
Motions are qualitatively the same for both figures, however,
the staying times are different for different mA’s. In (b), the
particle is swept out before it is randomized sufficiently. . . . . 86
4.3 Average staying time in the chaos region (τ1) as a function of
mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
vii

4.4 Local Lyapunov exponents for different subdomains Ω(R) (mA =
0.002). We define the chaos region such that the local Lya-
punov exponents have a plateau R . 1.0. . . . . . . . . . . . . 88
4.5 Local Lyapunov exponents for different mA’s. For larger mA,
the local Lyapunov exponents are strongly damped and have
no plateau region. . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.6 Velocity distributions in the chaos region (mA = 0.001, ` = 0).
(a)-(c): distributions of vx, vy, vz, after initial randomization
phase with the Gaussian fitting curves. (d)-(f): temporal evo-
lutions of the distributions of vx, vy, vz. . . . . . . . . . . . . . 90
4.7 Standard deviations of the velocity distribution (mA = 0.001, ` =
0). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.8 Evolution of the average velocity in the direction of the electric
field (mA = 0.001, ` = 0). The ensemble constants of the
particles remaining in the chaos region. The average velocity
increases linearly. Dotted line shows a linear fitting curve.
Dot-dashed line shows the average velocity weighted by the
number of particles (4.14). . . . . . . . . . . . . . . . . . . . . 92
viii

4.9 Evolution of the number of particles in the chaos region. The
number decreases exponentially. . . . . . . . . . . . . . . . . . 93
4.10 Petschek-type fast reconnection model. The regions (I) and
(D) are the ideal MHD and dissipation regions, respectively. . 94
5.1 Hierarchy of the scale in the magnetic reconnection process. . 98
ix

Chapter 1
Introduction
1

Nonlinear phenomena in two-fluid plasmas are studied in this thesis. Plas-
mas, which are constituted of electrons and positively charged ions, have a
huge hierarchy of structures – particle/fluid pictures of electrons/ions. Si-
multaneous existence, and interaction of structures on disparate scales are
the defining characteristic of complexity. The scale hierarchy is likely to pre-
vent the system from being analyzed in terms of noninteracting independent
elements. Nonlinearity creates interactions of different scales. Macroscopic
structures of plasmas can evolve only with the help of microscopic effects in
the scale of particle motion. Ordered structures in the complex system are
understood as the self-organization [1] or chaos [2, 3].
Self-organization means the spontaneous generation of large-scale coher-
ent structures. The structure spontaneously arise from homogeneous tur-
bulence reflecting properties of turbulent drive. A well-known example of
self-organization in plasma is magnetic field reversal in Reversed-Field Pinch
(RFP) device [4], a kind of magnetic containment of plasmas. The field rever-
sal phenomenon is first observed accidentally in the toroidal pinch experiment
called Zeta [5]. Plasmas in RFP devices may self-organize the reversed-field
configuration, where the magnetic field is reversed in the peripheral region
after initial turbulent phase driven by large current. The self-organization of
2

plasma is now understood by the variational principle in the framework of
the magnetohydrodynamics (MHD) theory. The motion of plasma is char-
acterized by ideal global dynamical invariants; the energy, the magnetic and
cross helicity. If the energy decrease faster than two helicities, the minimum
energy state will lead the so-called force-free state [6–11]. However, this is
not always the case. If the magnetic helicity is small and the cross helicity
is large relative to the energy, a self-organized state will appear in the form
of an aligned state of the magnetic field and flow field because of the Alfven
wave effect [12–15]. The theory of force-free state is also applied to the mag-
netic reconnection and energy release in the solar corona [16–18]. Because
the coronal magnetic field is anchored in the photosphere, the dynamics in
the solar corona is driven by photospheric convection, which is analogous to
the RFP driven by external circuit.
An important point of the self-organization theory is the selective de-
cay process of dynamical invariants in the turbulent phase. In a fully de-
veloped three-dimensional (3D) high-Reynolds number hydrodynamic tur-
bulence, the energy spectrum shows power-law property which reflect the
similarity. Phenomenological argument by Kolmogorov [19] gives the energy
3

spectrum (Fig. 1.1 (a)),
E(k) ∝ k−5/3. (1.1)
However, Kraichnan argued that in 2D hydrodynamic turbulence, the energy
spectrum cascade inversely to small wavenumbers, and self-organize large
scale structures [20]. The enstrophy directly cascade to small scales and
dissipate faster than the energy (Fig. 1.1 (b)). In MHD turbulence the Alfven
effect modifies the basic inertial range scaling [21, 22]. Anisotropy of MHD
turbulence has been also discussed [23–28]. The scaling relation of energy
spectrum parallel and perpendicular to the local magnetic field differs.
Numerical computations have become an indispensable tool in turbulence
research. In basic turbulence theory, one usually needs the exact informations
down to the dissipative scales (Kolmogorov scales). Direct numerical simu-
lations (DNSs) [29, 30] require computer memory proportional to the nine-
fourth power of the Reynolds number. For practical applications, one often
make approximations at small scales [31–33] to simulate the high-Reynolds
number turbulence. However, recent development of high-performance com-
puter (Fig. 1.2) [34] enables the DNSs of high Reynolds numbers. The DNS
starts from Orszag and Patterson in 1972 (Re ' 10) [30]. The largest DNS
in 2004 is Re ' 104 by Kaneda et al. [35] performed by the earth simula-
4

tor [36]. In the MHD turbulence, the problem is more serious because of the
nonlinear interaction between the magnetic field and the flow field. Muller
and Biskamp [37] have done MHD turbulence simulation of Re ' 103.
The self-organization of plasma including strong flow is one of the topics
dealt in this thesis. Flows in plasmas are very common both in laboratory and
astrophysical situations. In fusion plasmas, it is indicated recently that there
are two types of flows [38–41] – streamers and zonal flows. The streamers,
which is originated from ejection of flows from the sun, considered to leads
large convective loss of plasmas. The zonal flow comes from the notion of
air stream of the Jupiter, which is considered to stretch and damp vortices
of plasmas and to improve confinements. Magnetic reconnections [42, 43]
and jets from accretion disks are another examples of plasma phenomena
associated with strong flows.
When we study an equilibrium of flowing plasmas, especially flowing per-
pendicular to the magnetic field, the single-fluid MHD model is not ade-
quate for this purpose. One of the problems is a singularity in an equilib-
rium equation [44–46]. Following the Grad-Shafranov recipe based on the
Clebsch representations of incompressible field, we can generalize the Grad-
Shafranov equation to include flows. However, the equation has a serious
5

singularity when strong flow exists. Furthermore, if we include compressibil-
ity, the equation becomes even more complicated – the equation may switch
between elliptic and hyperbolic. The hyperbolicity is associated with shocks,
and dangerous for plasma confinement.
Another problem is related to scale invariance of MHD equation. A small
scale structure plays an important role in macroscopic plasma phenomena.
Since the Cauchy data of the equilibrium equation is an arbitrary function,
it may contain any arbitrary small scale. The well-known Parker’s current
sheet model [47] can be represented by wrinkles of the Cauchy data. The
scope of Cauchy solutions underlying Parker’s model may be limited when
we consider general non-integrable characteristics in 3D systems. In 3D, the
characteristic curves are embedded densely in space, inhomogeneous Cauchy
data leads to pathology, and the homogeneous Cauchy data yields only the
relatively trivial Taylor relaxed state.
In two-fluid plasma, the Hall term, deviation of the ion motion from the
electron fluid, leads a nonlinear singular perturbation which may remove
above mentioned difficulties. A singular perturbation appears as a term
with highest order derivatives multiplied by a small parameter. In standard
understanding of physicists, terms with small coefficients may give minor
6

contribution to physics, thus, it may be usually neglected. However, the
singular perturbation may self-organizes small scale structures of its intrinsic
scale. The effects of the small scale structures no longer ignorable. Moreover,
it is pointed out by many researchers that the Hall term may play important
roles in astrophysical plasmas [48–52].
In Chap. 3, the self-organization processes in Hall-MHD plasmas are in-
vestigated by numerical simulations. It is theoretically predicted that the
so-called “double Beltrami” equilibrium [53] may be self-organized in two-
fluid plasmas. To understand the relaxation process in two-fluid plasma, one
may construct the variational principle using the global invariants by analogy
with the Taylor theory. The variational principle, however, need more rigor-
ous mathematical treatment [54] concerning the concept of selective decay.
In Chap. 4, we studied microscopic particle motion in a inhomogeneous
electromagnetic field. In a strongly inhomogeneous magnetic field, conserva-
tion of adiabatic invariants is broken. The increase of the degree of freedom
can results in chaotic motion. The chaotic motion of particles may be a
possible mechanism of producing a collisionless resistivity [55]. The mixing
effect of chaos brings about a rapid increase of the kinetic entropy. This
process, however, saturates after a short time, so that a mixing process all
7

alone cannot lead to a diffusion-type dissipation. In an open system where
particles can escape from a domain of the phase space (either through coor-
dinate of momentum axes) after certain staying time, the saturation of the
entropy can be avoided, and a continuous dissipation process is achieved.
The chaos-induced collisionless resistivity of ions enable fast magnetic re-
connection [56]. To apply the chaos-induced resistivity in the fast magnetic
reconnection, we have introduced a mesoscopic model and have derived a
relation connecting macroscopic scale and the microscopic parameters in a
universal form. The kinetic effect produces a strong collisionless dissipation,
giving a lower bound for the length scale. Hence, we can remove the unphys-
ical scale length reduction (down to the subgyroradius regime) [57] deduced
from the direct application of the single-fluid MHD in the original Petschek
model [58], which is incapable of encompassing the huge scale separation.
8

E(k
)
k
dissipation
energy input
inertial range k-5/3E
(k)
k dissipation
energy input
k-5/3
k-3
inverse cascade
forward cascade
(a) (b)
Figure 1.1: Energy spectrum. (a) Kolmogorov spectrum (b) spectrum of
dual cascade in two-dimensional turbulence.
9

Figure 1.2: Speedup trend of computers.
10

Chapter 2
Hall Magnetohydrodynamics
and Equilibrium
11

2.1 Hall Magnetohydrodynamic Equations
We consider two component plasma – electron and singly charged ion, and
introduce compressible two-fluid magnetohydrodynamic (MHD) equations
(see for example [59–61]). Continuity equations and momentum equations
for each species are written as
∂tne +∇ · (neV e) = 0, (2.1)
∂tni +∇ · (niV i) = 0, (2.2)
nme [∂tV e + (V e · ∇)V e]
= −en(E + V e ×B)−∇pe −R +∇ ·←→Π e, (2.3)
nmi[∂tV i + (V i · ∇)V i
]
= en(E + V i ×B)−∇pi + R +∇ ·←→Π i, (2.4)
R = −ζ(V i − V e), (2.5)
where ne,i are the number densities, V e,i are the flow velocities, me,i are the
masses, pe,i are the pressures,←→Π e,i are the viscous stress tensors, e is the
elementary charge, and E, B are the electric and the magnetic fields. The
subscripts “e”, “i” denote an electron and an ion, respectively. The term
R represents the momentum transfer between electron and ion, and ζ is a
12

positive constant. The viscous stress tensor is given by
←→Π = ν
[∇V + t(∇V )− 2
3δij∇ · V
]+ ν ′δij∇ · V , (2.6)
where ν and ν ′ are the viscosity (ν ′ is often called the second viscosity), t
denotes a transpose and δij is the Kronecker’s delta [62, 63]. In the Navier-
Stokes equation for neutral fluids, the second viscosity is often neglected (the
Stokes relation) and the divergence of the stress tensor becomes
∇ ·←→Π = ν∆V +1
3ν∇(∇ · V ). (2.7)
It is pointed out by Braginskii [64] that the coefficients of the first and second
term in (2.7) differ by a factor of the cyclotron frequency normalized by the
collision frequency in the presence of strong magnetic field because the motion
across the magnetic field is restricted. However, we use (2.7) as the viscous
dissipation term for simplicity.
The magnetic field B and the electric field E obey the Maxwell’s equa-
13

tions
∂tB = −∇×E, (2.8)
∂tE = c2∇×B − c2µ0j, (2.9)
∇ ·B = 0, (2.10)
∇ ·E = 0, (2.11)
j = en(V i − V e), (2.12)
where j is the current density, µo is the vacuum permeability, and c is the
speed of light. We have assumed that plasma is approximately electrically
neutral (quasi-neutral), such that ne ≈ ni = n.
(2.1)-(2.12) and appropriate equations of state for pe,i give the full set of
two-fluid MHD equations. Local existence of solutions has been proved [65]
for the initial-value problem of the two-fluid equation in the incompressible
limit, together with the boundary conditions,
n×E = 0 on ∂Ω, (2.13)
V i,e = 0 on ∂Ω. (2.14)
Since the electron mass is very small compared with the ion mass, and
can be neglected in many circumstances, we omit the inertia term and the
14

viscous term in (2.3). Then, we obtain generalized Ohm’s law,
E + V e ×B = − 1
en∇pe − 1
enR. (2.15)
The correction of the displacement current to the plasma dynamics is also
small due to the smallness of the coefficient in a non-relativistic regime.
Neglecting the displacement current in (2.9), we obtain
∇×B = µ0j = µ0en(V i − V e). (2.16)
Inserting (2.15) into (2.4) and (2.8), and eliminate V e using above equation,
we obtain
nmi[∂tV i + (V i · ∇)V i
]
=1
µ0
(∇×B)×B −∇(pi + pe) +∇ ·←→Π i, (2.17)
∂tB = ∇×[(V i −
1
en∇×B)×B
]
− 1
en2∇n×∇pe −∇× (ηj) , (2.18)
where we have defined the resistivity η ≡ ζµ0/e2n2.
In order to close the set of equation, we must relate the pressure with other
variables. If we assume heat exchanges between different parts of the plasma
and between the plasma and bodies adjoining it are absent, the motion of
15

the ideal plasma must be supposed adiabatic. The adiabatic relation
p/ργ = const., (2.19)
leads the time evolution of pressure
∂tp + (V · ∇)p + γp∇ · V = 0, (2.20)
where γ is the ratio of specific heats. However, the viscous and resistive
dissipation heat plasma locally. Thus, we introduce the equation of state by
following formula,
∂tp + (V · ∇)p + γp∇ · V = S, (2.21)
where S is the heat source term given by
S = (γ − 1)
[ν|∇ × V |2 +
4
3ν|∇ · V |2 + η|∇ ×B|2
]. (2.22)
We summarize the set of Hall-MHD equations in dimensionless form.
Variables are normalized by typical scale length L, appropriate measure of
the magnetic field B0 and density n0 (the ion mass mi is assumed to be unity
such that ρ0 = n0) as
x → Lx, B → B0B, n → n0n,
V → VAV , t → τAt, p → (B20/µ0)p,
(2.23)
16

where VA ≡ B0/√
µ0n0mi is the Alfven velocity, τA ≡ L/VA. The normalized
Hall-MHD equations become
∂tn +∇ · (nV ) = 0, (2.24)
n[∂tV + (V · ∇)V ]
= j ×B −∇p +1
Re
(∆V +
1
3∇(∇ · V )
), (2.25)
∂tB = ∇×[(
V − ε
n∇×B
)×B
]+
1
Rm∆B, (2.26)
∂tp + (V · ∇)p + γp∇ · V = S, (2.27)
S = (γ − 1)
[1
Re|∇ × V |2 +
4
3Re|∇ · V |2 +
1
Rm|∇ ×B|2
], (2.28)
∇×B = j = n(V − V e), (2.29)
where Re ≡ VAL/ν is the Reynolds number, Rm ≡ VAL/η is the magnetic
Reynolds number and ε ≡ δi/L (δi = c/ωpi is the ion collisionless skin depth).
We have neglected the electron pressure for simplicity and omit the subscript
for ions.
17

2.2 Magnetohydrodynamic Waves in Homo-
geneous Plasmas
Let us consider small amplitude wave in the Hall-MHD in the ideal limit
Re, Rm → ∞. Linearizing the equations (2.24)-(2.27) around a uniform
equilibrium where B = B∇z, V = 0, n and p, we obtain
∂tn = −n∇ · V , (2.30)
∂tp = −γp∇ · V , (2.31)
∂tV = − 1
n∇p +
1
n(∇× B)× B, (2.32)
∂tB = ∇× (V × B)− ε
n∇× ((∇× B)× B). (2.33)
Variables with tilde “ ” denote fluctuations. Assume exp(i(k · x − ωt)) de-
pendence of fluctuations and replace “∂t” by “−iω” and “∇” by “ik”, we
obtain the following eigenvalue equation,
−iωξ = Aξ, (2.34)
18

where ξ = t(n, p, vx, vy, vz, Bx, By, Bz) and
A =
0 0 −ikxn −ikyn −ikzn 0 0 0
0 0 −ikxγp −ikyγp −ikzγp 0 0 0
0 − ikx
n0 0 0 ikzB
n0 − ikxB
n
0 − iky
n0 0 0 0 ikzB
n− ikyB
n
0 − ikz
n0 0 0 0 0 0
0 0 ikzB 0 0 0 − εk2zBn
εkykzB
n
0 0 0 ikzB 0 εk2zBn
0 − εkzkxBn
0 0 −ikxB −ikyB 0 − εkykzB
nεkzkxB
n0
.
(2.35)
Since pressure and density are related through the adiabatic relation, the
first or the second row can be removed. The remaining 7×7 matrix contains
seven eigenvectors and corresponding eigenvalues. From the determinant of
the matrix A+ iωδij, we obtain the dispersion relation [66,67]
ω(ω2 − V 2Ak2
z)[ω4 − (C2
s + V 2A)k2ω2 + C2
s V2Ak2
zk2]
= ε2V 2Ak2
zk2ω3(ω2 − C2
s k2), (2.36)
where k =√
k2x + k2
y + k2z , VA ≡ B/
√n, Cs ≡
√γp/n are the Alfven ve-
locity and the sound velocity of the uniform equilibrium in the normalized
unit, respectively. If ε = 0, we recover the dispersion relation of the MHD
19

equations, which gives the entropy wave
ω = 0, (2.37)
the shear Alfven wave
ω2 = V 2
Ak2z , (2.38)
and the fast and slow magneto-sonic waves
ω2 =1
2
[C2
s + V 2
A)k2 ±((C2
s + V 2
A)2k4 − 4C2sV
2Ak2
zk2) 1
2
]. (2.39)
If we consider waves traveling along the magnetic field, i.e. k = kz, the
sound wave (ω = ±Csk) decouples. The dispersion relation of the shear
Alfven wave is modified by the Hall term as
ω2 − V 2
Ak2z = ±εVAk2
zω, (2.40)
which is called the Alfven whistler wave.
2.3 Double Beltrami Equilibrium
We review the special equilibrium solution to the Hall-MHD equations. In an
incompressible, ideal limit, the Hall-MHD equations are described by time
evolution of the vector potential A and V . Writing E = −∇φ− ∂tA where
20

φ is the scalar potential, (2.26), (2.25) translate into
∂tA = (V − ε∇×B)×B −∇(φ− εpe), (2.41)
∂t(A + εV ) = V × (B + ε∇× V )−∇(εV 2
2+ εpi + φ). (2.42)
Taking the curl of (2.41) and (2.42), we can cast the Hall-MHD equations
into coupled vortex equations,
∂tωj −∇× (U j × ωj) = 0 (j = 1, 2), (2.43)
where j = 1, 2 indicate an electron and an ion. Pairs of generalized vorticities
and the corresponding flows are defined by
ω1 = B, ω2 = B + ε∇× V ,
U 1 = V − ε∇×B, U 2 = V .
(2.44)
The simplest equilibrium solution to (2.43) is given under the “Beltrami
condition” [53], that demands alignment of the vorticities along the corre-
sponding flows,
U j = µjωj (j = 1, 2). (2.45)
Writing a = 1/µ1, b = 1/µ2, and assuming a,b are constants, the Beltrami
condition translates into a system of simultaneous linear equations in B and
21

V ,
B = a(V − ε∇×B), (2.46)
B + ε∇× V = bV . (2.47)
Combining two equations yields second-order equation for u = B and V ,
(curl− λ+)(curl− λ−)u = 0, (2.48)
where we denote “∇×” by “curl” implying an operator, and
λ± =1
2ε
[(b− a−1)±
√(b− a−1)2 − 4(1− ba−1)
]. (2.49)
Because the operators (curl− λ±) commute, the general solution to (2.48) is
given by a linear combination of two Beltrami fields,
B = C+G+ + C−G−, (2.50)
V = (a−1 + ελ+)C+G+ + (a−1 + ελ−)C−G−, (2.51)
where G± are the Beltrami functions satisfying (curl − λ±)G± = 0, and
C± are constants. The parameters λ±, which are the eigenvalues of the curl
operators, characterize the spatial scales of the vortices G±.
The Beltrami conditions (2.46), (2.47) give a special class of the general
steady state solutions such that
U j × ωj = 0 = ∇ϕj (j = 1, 2). (2.52)
22

where ϕj is a certain scalar field corresponding to the energy density given
by
φ1 = φ− εpe (2.53)
φ2 = φ + εpi + εV 2
2(2.54)
The latter equality in (2.52), called the “generalized Bernoulli conditions”,
demands that the energy density is uniform in space. Subtracting (2.53) from
(2.54), we obtain
V 2 + β = const. (2.55)
where the beta ratio in the normalized unit is given by β = 2(pi+pe). The re-
lation demands the static pressure is sustained by the dynamic pressure, and
suggests an improvement of plasma confinement due to the double Beltrami
field.
2.4 Relaxation Process
The self-organization process of a plasma into relaxed states may be discussed
by a variational principle. Taylor [6] argued that the minimization of the
magnetic energy under the constraint of the magnetic helicity conservation
23

leads the relaxed state in the MHD model. The variation
δ(Em − µH) = 0 (2.56)
results in the force-free equilibrium
∇×B = µB. (2.57)
This model is based on the “selective decay” implying that one of the con-
stants of motion of the ideal limit decays faster than the others. However,
the variational principle for the two-fluid MHD requires a more generalized
and rigorous arguments [54].
2.4.1 Conservation Laws
The total energy in the system is given by sum of the magnetic energy Em,
the kinetic energy Ek, and the thermal energy Et,
E = Em + Ek + Et =
∫
Ω
1
2B2dx +
∫
Ω
1
2nV 2dx +
∫
Ω
p
γ − 1dx. (2.58)
24

The time derivative of the energies are calculated as,
d
dtEm = −
∫
∂Ω
E ×B · dS −∫
Ω
V · j ×Bdx− 1
Rm
∫
Ω
j2dx, (2.59)
d
dtEk =
∫
∂Ω
[(−1
2nV 2 +
4
3Re∇ · V
)V + V × (∇× V )
]· dS
+
∫
Ω
V · j ×Bdx−∫
Ω
V · ∇pdx
− 1
Re
∫
Ω
|∇ × V |2dx− 4
3Re
∫
Ω
|∇ · V |2dx, (2.60)
d
dtEt = −
∫
∂Ω
pV
γ − 1· dS −
∫
Ω
p∇ · V dx +
∫
Ω
S
γ − 1dx. (2.61)
Then, the time derivative of the total energy is given by
dE
dt= −
∫
∂Ω
E ×B · dS
−∫
∂Ω
(1
2nV 2 +
γ
γ − 1p− 4
3Re(∇ · V )
)V · dS
+
∫
∂Ω
V × (∇× V ) · dS
−∫
Ω
(1
Re|∇ × V |+ 4
3Re|∇ · V |+ 1
Rmj2 − S
γ − 1
)dx.(2.62)
If the system is surrounded by a rigid perfect conducting wall, (n × E =
0, V = 0 at the wall), the total energy conserves through all dynamic process
regardless of whether the dissipations exist or not. In the incompressible limit
(which corresponds to γ → ∞), the thermal energy is irrelevant. The total
energy E = Em + Ek, however, monotonically decrease if the dissipations
exist.
25

The generalized helicities, defined by
Hj =
∫
Ω
ωj · (curl−1ωj)dx (j = 1, 2), (2.63)
are also global ideal invariants in the incompressible Hall-MHD. Conservation
of helicities is proved straightforwardly from the vortex equations (2.43). The
time derivative of helicity is given by
dH
dt=
∫
Ω
∂ω
∂t· (curl−1ω)dx +
∫
Ω
ω · (curl−1∂ω
∂t)dx
=
∫
Ω
∇× (U × ω) · (curl−1ω)dx +
∫
Ω
ω · (U × ω)dx
=
∫
∂Ω
(U × ω)× (curl−1ω) · dS. (2.64)
The boundary condition,
n×A = 0, n× V = 0 on ∂Ω, (2.65)
yields the conservation of the helicities.
2.4.2 Variational Principle
There are three global ideal invariants in the incompressible Hall-MHD:
E =1
2
∫
Ω
(B2 + V 2)dx, (2.66)
H1 =
∫
Ω
A ·Bdx, (2.67)
H2 =
∫
Ω
(A + εV ) · (B + ε∇× V )dx, (2.68)
26

representing the total energy, the electron helicity, and the ion helicity. The
minimization of a generalized enstrophy (measure of the complexity or the
perturbations),
F =1
2
∫
Ω
|∇ × (A + εV )|2dx, (2.69)
with keeping E, H1, and H2 constant is carried out through the variation
δ(F − µ0E − µ1H1 − µ2H2) = 0, (2.70)
where µ0, µ1, µ2 are Lagrange multipliers. The Euler-Lagrange equation be-
comes
(curl− Λ1)(curl− Λ2)(curl− Λ3)u = 0 (u = B or V ), (2.71)
and the general solution to (2.71) is linear combination of three Beltrami
functions, which is not an equilibrium in general. The DB field is obtained
by adjusting E, H1, H2 to condense the “triple Beltrami field” into the double
Beltrami field given by two eigenfunctions. The adjustment condition is given
by
E − µ′1H1 − µ′2H2 = 0. (2.72)
The Euler-Lagrange equation of the variation δ(E−µ′1H1−µ′2H2) = 0, which
is equivalent to the solution of (2.72), gives the DB equation (2.48). The
27

relaxation process is realized by minimizing perturbations, which is scaled
by the generalized enstrophy F , with appropriate adjustment of macroscopic
variables E,H1, H2.
2.5 Force-Free Equilibrium
In this section, we review a structure of the force-free equilibrium, which
describes the relaxed state of the MHD model. The force-free equilibrium is
given by the eigenfunction of the curl operator. The relaxation process will
choose an appropriate eigenvalue for the initial global constants with satisfy-
ing given boundary conditions. First, we study the eigenfunction expansion
of solenoidal vector fields, and then, discuss the minimum energy state.
2.5.1 Eigenvalue Problem of the Curl Operator
We consider an eigenvalue problem
∇× u = λu, (2.73)
for a solenoidal field u ∈ L2σ
L2σ(Ω) ≡ u ∈ L2(Ω);∇ · u = 0 in Ω,n · u = 0 on ∂Ω, (2.74)
28

in a bounded 3D domain Ω with smooth boundary ∂Ω. We assume that Ω is
multiply connected with cuts Σj [j = 1, · · · , ν (the first Betti number)], i.e.,
Ω\ ∪ Σj is simply connected.
In multiply connected domain Ω, the curl operator has a point spectrum
that covers the entire complex plane [68,69]. This is because of the existence
of a nonzero harmonic field h ∈ L2H ,
L2H(Ω) ≡ h ∈ L2(Ω);∇ · h = 0,∇× h = 0 in Ω, n · h = 0 on ∂Ω, (2.75)
which plays the role of an inhomogeneous term in the eigenvalue problem.
The solenoidal field u can be decomposed into the harmonic field h and its
orthogonal complement uΣ. The latter component is a member of the Hilbert
space
L2Σ(Ω) ≡ ∇×w; w ∈ H1(Ω),∇ ·w = 0 in Ω, n×w = 0 on ∂Ω. (2.76)
The Hilbert space L2Σ is identical to the Hilbert space L2
S where
L2S(Ω) ≡ u ∈ L2(Ω);∇ · u = 0 in Ω, n · u = 0 on ∂Ω,
Φj = 0 (j = 1, · · · ν), (2.77)
and
Φj =
∫
Σj
u · dS (j = 1, · · · , ν) (2.78)
29

is the flux through the cut Σj. The decomposition
L2σ = L2
H ⊕ L2Σ (2.79)
is called the Hodge-Kodaira decomposition. The eigenvalue problem now
reads as
∇× uΣ = λ(uΣ + h). (2.80)
If we take h = 0, we find a nontrivial solution only for λ ∈ σp, where
σp is a countably infinite set of real numbers. The set σp constitutes the
point spectrum of the self-adjoint curl operator that is defined in the Hilbert
space in L2Σ(Ω). For λ′ /∈ σp, we must invoke h 6= 0 and find a solution
uΣ = (curl− λ′)−1h, where the curl denotes the self-adjoint curl operator.
2.5.2 Minimum Energy State
The complete orthogonal set Ψj (∇×Ψj = λjΨj) spanning L2Σ(Ω) allows
B = BΣ + Bh =∑
j
bjΨj + Bh. (2.81)
30

Defining B−Bh = ∇×AΣ and Ag = A−AΣ, we may write Bh = ∇×Ag.
The magnetic energy and the magnetic helicity are given by
E =1
2
∫
Ω
B2dx =1
2
∫
Ω
B2Σdx +
1
2
∫
Ω
B2
hdx, (2.82)
H =
∫
Ω
A ·Bdx
=
∫
Ω
AΣ ·BΣdx + 2
∫
Ω
Ag ·BΣdx +
∫
Ω
Ag ·Bhdx, (2.83)
where the boundary condition n×AΣ = 0 and the orthogonality of BΣ and
Bh are used.
The force-free condition demands BΣ = bΨ (∇ ×Ψ = λΨ), and AΣ =
bλΨ. Each term in (2.82), (2.83) is calculated as,
∫
Ω
AΣ ·BΣdx =1
λ
∫
Ω
B2Σdx, (2.84)
∫
Ω
Ag ·BΣdx =
∫
Ω
AΣ ·Bhdx +
∫
∂Ω
AΣ ×Ag · dS
=1
λ
∫
Ω
BΣ ·Bhdx +
∫
∂Ω
AΣ ×Ag · dS = 0, (2.85)
∫
Ω
Ag ·Bhdx =
∫
Ω
Ag ·(
1
λ∇×BΣ −BΣ
)dx
=1
λ
∫
Ω
Bh ·BΣdx +1
λ
∫
∂Ω
BΣ ×Ag · dS −∫
Ω
Ag ·BΣdx
= −∫
∂Ω
Ag ×AΣ · dS = 0. (2.86)
31

Then, we obtain the relations,
H =
∫
Ω
AΣ ·BΣdx, (2.87)
E =1
2
∫
Ω
B2Σdx +
1
2
∫
Ω
B2
hdx
=λ
2H +
1
2
∫
∂Ω
Ag ×Bh · dS. (2.88)
The second term in (2.88) can be expressed by flux variables. The toroidal
and the poloidal magnetic flux and the poloidal current are given by
Ψt =
∫
SpB · dS =
∫
SpBh · dS, (2.89)
Ψp =
∫
St
B · dS, (2.90)
Ip =
∫
St
∇×B · dS. (2.91)
where Sp and St are the poloidal and the toroidal cross section, respectively.
The poloidal/toroidal cross section is normal to the toroidal/poloidal direc-
tion. By introducing the multi-valued scalar potential φ, which describes the
harmonic field as Bh = ∇φ, the energy of the harmonic field becomes
1
2
∫
Ω
B2
hdx =1
2
∫
Ω
∇φ ·Bhdx
=1
2[φ]
∫
SpBh · dS =
1
2[φ]Ψt, (2.92)
where [φ] is the jump of φ across the cut, which does not depend on the
coordinate. [φ] is evaluated by integrating ∇φ along the loop in the toroidal
32

direction `t,
[φ] =
∫
`t
∇φ · d`
=
∫
`t
Bh · d` =
∫
`t
(1
λ∇×BΣ −BΣ) · d`
=1
λ
∫
St
∇×∇×BΣ · dS −∫
St
∇×BΣ · dS
=
∫
St
∇×BΣ · dS − λ
∫
St
B · dS
= Ip − λΨp. (2.93)
Thus, the relation between the magnetic energy and the helicity is expressed
by
E =λ
2H +
1
2(Ip − λΨp)Ψt. (2.94)
Cylindrical geometry
The Chandrasekhar-Kendall (C-K) [70] function is defined by
umn = λ(∇ψmn ×∇z) +∇× (∇ψmn ×∇z), (2.95)
where
ψmn = Jm(µr)ei(mθ−kz) (k = nπ/L; mn ∈ 0, 1, 2, · · · ), (2.96)
λ = ±(µ2 + k2)1/2, (2.97)
33

and Jm is the Bessel function. The general solution of the force-free equilib-
rium in a periodic cylinder with the radius a and the length L is given by
the C-K function,
B =∑m,n
umn =∑m,n
Bmn
(r)ei(mθ−kz), (2.98)
Bmn
(r) =
ibmnΛmnr (µr)
−bmnΛmnθ (µr)
bmnJm(µr)
, (2.99)
Λmnr (µr) =
1
2
√∣∣∣∣λ + k
λ− k
∣∣∣∣Jm−1(µr) +1
2
√∣∣∣∣λ− k
λ + k
∣∣∣∣Jm+1(µr), (2.100)
Λmnθ (µr) =
1
2
√∣∣∣∣λ + k
λ− k
∣∣∣∣Jm−1(µr)− 1
2
√∣∣∣∣λ− k
λ + k
∣∣∣∣Jm+1(µr), (2.101)
The eigenvalue is determined by the boundary condition n ·B|r=a = 0, i.e.,
Λmnr (µa) =
1
2
√∣∣∣∣λ + k
λ− k
∣∣∣∣Jm−1(µa) +1
2
√∣∣∣∣λ− k
λ + k
∣∣∣∣Jm+1(µa) = 0. (2.102)
For the axisymmetric solution (m,n) = (0, 0), the boundary condition is
trivially satisfied. The eigenvalue for the axisymmetric mode is determined
from the given toroidal flux.
The toroidal flux, the energy, and the helicity for the axisymmetric mode
34

are given by
Ψt = 2πab00
λJ1(λa), (2.103)
E00 = 2πL(b00a)2
2
(J2
1 (λa) + J20 (λa)− 1
λaJ0(λa)J1(λa)
), (2.104)
H00 = 2πL(b00a)2λ
(J2
1 (λa) + J20 (λa)− 1
λaJ0(λa)J1(λa)
),
−Lb00
λJ0(λa)Ψt. (2.105)
The normalization of the energy E ≡ 2 a2
L/2πΨ2tE and the helicity H ≡ a
L/2πΨ2tH
yields
E00 =(λa)2
J1(λa)2
(J1(λa)2 + J0(λa)2 − 1
λaJ0(λa)J1(λa)
), (2.106)
H00 =1
λE00 − J0(λa)
J1(λa). (2.107)
In Fig. 2.1, the solid line is a plot of E(λa) vs H(λa) for the (m,n) = (0, 0)
mode. Now suppose we superpose a discrete eigenmode on the (m,n) = (0, 0)
mode. Evaluating H for such a mode, we find that it is of the form
H(λa) = H00(λa) +
(bmn
b00
)2
Hmn(λa), (2.108)
and
Hmn =1
λaEmn (2.109)
because (m,n) 6= (0, 0) modes contain no toroidal flux. By variating bmn
with fixed λa, we draw straight lines originating on the (m,n) = (0, 0) curve
35

(the dotted lines in Fig. 2.1). Each dotted line corresponds to the discrete
eigenvalue satisfying the boundary condition (2.102) with the aspect ratio
L/a = 3. The mixed state with λa = 3.11 is the lowest energy state for
H > 8.30 [6, 71,72]. Typical spatial structures are shown in Fig. 2.2.
36

0
20
40
60
80
100
0 5 10 15 20 25 30
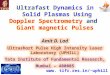
(m,n)=(0,0)(m,n)=(1,3) λa=3.13(m,n)=(1,4) λa=3.11(m,n)=(1,5) λa=3.18(m,n)=(2,5) λa=4.71(m,n)=(3,5) λa=6.09
H
E
8.30
Figure 2.1: Energy of the force-free solution in a cylinder. The arrows indi-
cate the direction of increasing λa. The solid line shows the (m,n) = (0, 0)
mode and the dotted lines show the discrete eigenmodes satisfying the bound-
ary condition (the aspect ratio = 3). The lowest magnetic energy state is the
axisymmetric state for H ≤ 8.30, and the helical state of the mode (1, 3) for
H > 8.30.
37

(a) (m,n)=(1,4) (b) (m,n)=(2,5)
Figure 2.2: Typical structures of the force-free state in a cylindrical geometry.
Figures show the isosurface and the contour plot in the poloidal cross section
of Bz. (a) is the minimum energy state, which corresponds to (m,n) = (1, 4),
(b) is the higher energy eigenstate of (m,n) = (2, 5).
38

Chapter 3
Nonlinear Simulation
39

3.1 Simulation Code
All numerical simulations in this chapter are carried out on “NEC SX-7
system” installed in the Theory and Computer Simulation Center of the
National Institute for Fusion Science (TCSC, NIFS). The SX-7 is a vector-
parallel supercomputer which has 5 nodes. Each node has 256 giga bytes
main memory, 32 processor elements (PEs). Processing speed of one PE is
about 8.8 giga floating operations per seconds.
3.1.1 Discretization and Time Integration
In order to solve continuous partial differential equations by computers, we
must discretize domain into finite grids and assign values of physical quan-
tities on each grid. The most simple, and common method is the finite differ-
ence method. We discretize space and time as (x, y, z, t) = (i∆x, j∆y, k∆z, n∆t)
and refer a variable f on the grid i, j, k at time n as fni,j,k. The Taylor ex-
pansion of f with respect to x is given by
f(x + ∆x) = f(x) +df
dx
∣∣∣∣x
∆x +d2f
dx2
∣∣∣∣x
(∆x)2
2+O((∆x)3), (3.1)
or in the discrete form,
fi+1 = fi +df
dx
∣∣∣∣i
∆x +d2f
dx2
∣∣∣∣i
(∆x)2
2+O((∆x)3). (3.2)
40

We can evaluate the derivatives by choosing appropriate coefficients. Typical
methods are summarized in Table. 3.1 [73]. In our simulation code, we use
the second order accuracy, central difference methods to evaluate the first
and the second order derivatives,
df
dx
∣∣∣∣i
=fi+1 − fi−1
2∆x, (3.3)
d2f
dx2
∣∣∣∣i
=fi+1 − 2fi + fi−1
(∆x)2. (3.4)
The time derivative may be evaluated in the similar way. We consider
the ordinary differential equation,
df
dt= L(f). (3.5)
The upstream and the central differencing give the following time integration
scheme,
fn+1 = fn + ∆tL(fn), (3.6)
fn+1 = fn−1 + 2∆tL(fn). (3.7)
(3.6) is called the Euler method (first order), and (3.7) is called the leap-flog
method (second order). However, time goes only positive way. We cannot
use variables at future time steps to construct higher order methods. The
Runge-Kutta-Gill (RKG) method uses intermediate time steps between n
41

Table 3.1: Typical methods to evaluate the derivatives.
df
dx= fi+1−fi
∆x+O(∆x)
df
dx= fi−fi−1
∆x+O(∆x)
df
dx= fi+1−fi−1
2∆x+O((∆x)2)
df
dx= −fi+2+4fi+1−3fi
2∆x+O((∆x)2)
df
dx= 3fi−4fi−1+fi−2
2∆x+O((∆x)2)
df
dx= 2fi+1+3fi−6fi−1+fi−2
6∆x+O((∆x)3)
df
dx= −fi+2+6fi+1−3fi−2fi−1
6∆x+O((∆x)3)
df
dx= −fi+2+8fi+1−8fi−1+fi−2
12∆x+O((∆x)4)
d2f
dx2= fi+2−2fi+1+fi
(∆x)2+O(∆x)
d2f
dx2= fi−2fi−1+fi−2
(∆x)2+O(∆x)
d2f
dx2= fi+1−2fi+fi−1
(∆x)2+O((∆x)2)
d2f
dx2= −fi+3+4fi+2−5fi+1+2fi
(∆x)2+O((∆x)2)
d2f
dx2= 2fi−5fi−1+4fi−2−fi−3
(∆x)2+O((∆x)2)
d2f
dx2= −fi+2+16fi+1−30fi+16fi−1−fi−2
12(∆x)2+O((∆x)4)
42

and n + 1, and achieves the higher order accuracy. [73, 74]. We employ the
fourth-order RKG method in the simulation code, given by
fn+1 = fn
+∆t
6[L(fn) + (2−
√2)L(f (1)) + (2 +
√2)L(f (2)) + L(f (3))], (3.8)
where the intermediate steps are evaluated by
f (1) = fn +∆t
2L(fn), (3.9)
f (2) = f (1) +∆t
2L(f (1)), (3.10)
f (3) = f (2) + ∆tL(f (2)). (3.11)
We must mention the reliability of the numerical scheme. It is proved
that, for linear scalar equation, the only scheme which converges the numer-
ical solution to the solution of the original equation is “stable” and “consis-
tent” scheme (Lax’s equivalence theorem [75]). Stability and consistency is
necessary and sufficient condition for convergence. The consistency of a finite
difference scheme means that the finite difference equation converges to the
original equation in the limit that time step and spatial grid spacing goes to
zero. The stability of the scheme will be discussed in the next section.
43

3.1.2 Stability Analysis
We consider, for simplicity, 1D advection-diffusion equation with constant
coefficients,
∂f
∂t+ c
∂f
∂x= d
∂2f
∂x2, (3.12)
where c, d are constants. The FTCS (forward in time central difference in
space) scheme,
fn+1i − fn
i
∆t+ c
fni+1 − fn
i−1
2∆x= d
fni+1 − 2fn
i + fni−1
∆x2, (3.13)
is used to introduce the stability of the finite difference scheme. According
to the Von Neumann, the scheme is stable if each Fourier mode damps in
time. Substituting the Fourier decomposition of fni
fni =
∑
k
fn(k)eik∆xi (3.14)
(where fn(k) is the amplitude of the Fourier mode k at time step n) into
(3.13) yields
fn+1eik∆xi = fneik∆xi
[1− c∆t
2∆x(eik∆x − e−ik∆x)
+d∆t
∆x2(eik∆x − 2 + e−ik∆x)
]. (3.15)
44

By introducing C ≡ c∆t/∆x (the Courant number), D ≡ d∆t/∆x2 (the
diffusion number), the amplification factor G ≡ fn+1/fn becomes
G = 1− iC sin k∆x + 2D(cos k∆x− 1). (3.16)
The stability condition is given by |G| ≤ 1, which requires,
0 ≤ C2 ≤ 4D2 ≤ 2D ≤ 1, (3.17)
∆t ≤ ∆x
C, ∆t ≤ ∆x2
2D, ∆t ≤ 2D
C2, (3.18)
∆x ≤ 2D
C. (3.19)
Since the calculation to derive the amplification factor G of the RKG scheme
is rather cumbersome, we give only the results in Fig. 3.1. The stability
condition of the RKG method is relaxed compared with the FTCS scheme.
We can choose larger ∆t in the RKG method. In a multi-dimensional case,
the stability condition may become more restrictive. For example, C/∆x
must be replaced by Cx/∆x + Cy/∆y + Cz/∆z in 3D. This means that we
must choose about three times smaller time step in 3D than in 1D.
The stability analysis due to Von Neumann is only applicable to the
linear problem. It is almost impossible to derive the exact stability criteria
of nonlinear problems. We can evaluate stability of the linearized equations,
and can discuss only local stability.
45

3.1.3 Numerical Smoothing
To suppress numerical error of the grid-size mode, we introduce an artificial
smoothing technique [76]. The smoothing procedure is expressed as,
fsmi = (1− α)fi + α〈f〉i, (3.20)
where α is the smoothing parameter which satisfies 0 ≤ α ≤ 1. The angle
bracket denotes average of the nearest grids:
2nd order : 〈f〉i =fi+1 + fi−1
2, (3.21)
4th order : 〈f〉i =−fi+2 + 4fi+1 + 4fi−1 − fi−2
6. (3.22)
The effect of smoothing is evaluated by the Fourier decomposition. Fourier
decomposition of (3.20) yields
fsmi = (1− α)
N∑
k=1
f(k)eik∆xi +α
2
N∑
k=1
f(k)eik∆xi +N∑
k=1
f(k)eik∆xi
= (1− α)N∑
k=1
f(k)eik∆xi
+α
2
N−1∑
k=0
f(k)eik∆x(i−1) +N+1∑
k=2
f(k)eik∆x(i+1)
(3.23)
If we assume periodicity, we obtain
fsmi =
N∑
k=1
f(k)[(1− α)eik∆xi +α
2(eik∆x(i−1) + eik∆x(i+1))]
=N∑
k=1
f(k)eik∆xi[(1− α) + α cos(k∆x)]. (3.24)
46

By the smoothing procedure, each Fourier mode f(k) is modified by a factor
which depends on k. The factor defines the smoothing function,
SM(k) = (1− α) + α cos(k∆x). (3.25)
We plot the smoothing function in Fig. 3.2. The smoothing procedure acts as
the low-pass filter and suppress high wavenumber numerical errors. We use
the second order smoothing in the simulation code. To suppress unphysical
grid-size error, α is set to α = 0.5.
3.2 Simulation Model
To test the two-fluid self-organization in a general dynamical framework, we
have developed a simulation code base to the methods in the previous section,
to solve a compressible, dissipative Hall-MHD plasma governed by (2.24)-
(2.27). The simulation domain is a rectangular box with size 2a× 2a× 2πR,
surrounded by a rigid perfect conducting wall. The system is periodic along
the z axis. The boundary conditions in x, y directions are
n ·B = 0, n× (∇×B) = 0, V = 0 at x, y = ±a. (3.26)
To assure tangential components of the electric field vanish, we set ε = 0 at
the wall.
47

In order to confirm a validity of the simulation code, we have solved
dispersion relations of purely transversal wave around a uniform equilibrium
in a periodic domain. The dispersion relation is given by (2.40). Figure 3.3
shows the dispersion relation for ε = 0, 0.1, 0.05. Results of the numerical
code agree well with the analytical curves. Thus, we consider that the code
works well.
3.3 Nonlinear Simulation
3.3.1 Initial Condition and Parameters
The initial condition for nonlinear simulation was a 2D force free equilibrium
that is also an equilibrium of the single fluid model [9–11];
B0 =
− 1k0
(k1B1 cos k2x sin k1y + k2B2 cos k1x sin k2y)
1k0
(k2B1 sin k2x cos k1y + k1B2 sin k1x cos k2y)
B1 cos k2x cos k1y + B2 cos k1x cos k2y,
, (3.27)
where B1, B2 are the amplitudes of two kinds of Fourier modes, k1 = n1π/(2a),
k2 = n2π/(2a), and n1, n2 are arbitrary integers. Figure 3.4 shows the iso-
surface of the toroidal magnetic field. Columns in different colors indicate
that the directions are opposite. A uniform density n0 = 1, and uniform
48

pressure are assumed. The amplitude of the uniform pressure is given by a
parameter β =∫
pdx/∫
B2dx. The initial condition has a flow such that
V 0 = (0, 0,MABz), where MA is the Alfven Mach number.
We carried out two simulation runs. The simulation domain is imple-
mented on 129×129×256 point grids. The parameters are β = 3, MA = 0.5,
and (a) ε = 0.1, (b) ε = 0.
3.3.2 Relaxed State
Figure 3.5 and 3.6 show snapshots of isosurfaces of the toroidal magnetic field
at t = 30τA, 60τA, 90τA, and 120τA. Because the initial condition is unstable
against the kink mode, initially assigned random perturbations exponentially
grow and plasma become turbulent. After the turbulent phase the magnetic
columns are settled into helically twisted final states (see Sec. 2.5). Fig-
ure 3.7 shows the time evolution of the energies. We see that the magnetic
energy decreases rapidly in the turbulent phase ((a) t ' 20 ∼ 40τA, (b)
t ' 30 ∼ 70τA), and after that it decreases in constant dissipation rate.
The time scale of Hall-MHD is slightly faster compared with the MHD. The
global structures (the helical mode number) do not depend on ε, and agree
with the Taylor’s prediction. However, there exists appreciable flow perpen-
49

dicular to the magnetic field in the Hall-MHD plasma. Time history of the
kinetic energy of the parallel and perpendicular components are shown in
Fig. 3.8. A remaining component of the kinetic energy in MHD is almost
parallel component, while about 10% of the perpendicular component exists
in Hall-MHD. Figure 3.9 shows the snapshots of the distribution of a, b in the
Beltrami condition for ε = 0.1. The Beltrami conditions are satisfied in the
magnetic column. The perpendicular component of the velocity is originated
from the Hall current,
V⊥ ' ε
n(∇×B)⊥. (3.28)
Figure 3.10 shows the distribution of the pressure and the absolute value
of flow in a poloidal cross section at t = 50τA. The pressure distribution
is almost uniform. This is because the kinetic energy is much less than the
thermal energy in the relaxed state. The kinetic energy is dissipated by the
strong viscosity through the dynamics process.
3.3.3 Relaxation Process
We discuss the relaxation process in terms of the variational principle in the
Hall-MHD plasma. Figure 3.11 shows the time evolution of the sum of the
magnetic and kinetic energies E ′, two helicities H1, H ′2 ≡ H2 −H1 and the
50

generalized enstrophy F ′ = F−Em normalized by the initial values. H ′2 is the
most fragile quantity, while H1 is the most conserving one. The simulation
result shows the fragility of the conserved quantities is determined by the
order of the derivative, and indicates the energy minimization is meaningless
in the Hall-MHD. In the relaxation process in Hall-MHD plasma is achieved
by minimizing the generalized enstrophy with appropriate adjustment of H ′2
to condensate into the DB equilibrium.
We also show the energy and helicity spectrum in Fig. 3.12. The low
wavenumber mode of energy decrease, while high wavenumber mode of he-
licity decreases. Because the system is not driving system, forward cascade
of the energy makes the energy spectrum lie down and inverse cascade of the
helicity makes the helicity spectrum stand up.
3.4 Summary
We have developed the Hall-MHD simulation code in a 3D rectangular do-
main. The Hall term leads the dispersion to the small amplitude wave. The
Alfven whistler wave has a quadratic dispersion and split the Alfven wave
into right-hand polarized electron mode and left-hand polarized ion mode.
51

By solving the dispersion relation of the Alfven whistler wave in a periodic
domain, we have validate the simulation code.
Nonlinear simulation of the self-organization process in flow-field coupled
state have been studied. Comparing the two-fluid relaxed state with that of
the single-fluid model, an appreciable flow with a component perpendicular to
the magnetic field, which does not exist in the single-fluid relaxed state, was
created by the Hall term, and highlights the difference between Hall-MHD
and MHD. The relaxation process is realized by minimizing the generalized
enstrophy with appropriate adjustment of ion helicity to condensate into the
DB field.
52

0
0.2
0.4
0.6
0.8
1
1.2
|G
(k∆
x)|
c=1.0, d=0.5c=0.8, d=0.4c=0.9, d=0.3
0 1 2 3 4 5 6
k∆x
0
0.2
0.4
0.6
0.8
1
1.2
|G
(k∆
x)|
0 1 2 3 4 5 6
k∆x
c=1.4, d=0.6c=1.6, d=0.75c=1.7, d=0.8
c=1.0, d=0.5
FTCS Runge-Kutta-Gill
Figure 3.1: Amplification factors of the FTCS and the Runge-Kutta-Gill
scheme. Stability condition demands |G(k∆x)| ≤ 1 for any k.
53

SM
(k∆x
)
k∆x
2nd: α=0.25 2nd: α=0.5 4th: α=0.3754th: α=0.1
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5 3
Figure 3.2: Smoothing functions defined by (3.25). To suppress completely
the grid scale errors (k∆x = π), α must be chosen to 0.5 for the second order
smoothing, and 0.375 for the fourth order smoothing.
54

ε=0.05 (+,R)
ωτΑ
2πRk02468
1012141618
0 2 4 6 8 10
numerical analitical
ε=0ε=0.1 (+,R)ε=0.1 (-,L)
ε=0.05 (-,L)
ε=0 ε=0.1 (+,R)ε=0.1 (-,L)
ε=0.05 (+,R)ε=0.05 (-,L)
Figure 3.3: Dispersion relation of the Alfven whistler wave (2.40). ε = 0
corresponds to the shear Alfven wave, fast/slow mode indicated by +/−
shows the electron/ion mode.
55

t = 0 [τA]toroidal direction
Figure 3.4: Initial condition of the magnetic field with (n1, n2) = (3, 3).
Columns show the isosurfaces of the magnetic field.
56

t = 0 [τA] t = 60 [τA]
t = 30 [τA] t = 120 [τA]
Figure 3.5: Isosurfaces of the toroidal magnetic field at time 30τA, 60τA,
90τA,120τA for ε = 0.1.
57

t = 0 [τA] t = 60 [τA]
t = 30 [τA] t = 120 [τA]
Figure 3.6: Isosurfaces of the toroidal magnetic field at time 30τA, 60τA,
90τA,120τA for ε = 0.0.
58

0
5
10
15
20
25
30
35
0 50 100 150 200 250
time [τA]
Ene
rgy Magnetic Energy
Kinetic EnergyThermal EnergyTotal Energy
Magnetic EnergyKinetic EnergyThermal EnergyTotal Energy
0
5
10
15
20
25
30
35
0 50 100 150 200 250
time [τA]
Ene
rgy
(a) ε=0.1 (b) ε=0.0
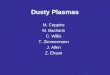
Figure 3.7: Time evolution of energies. The time scale of relaxation is faster
in the Hall-MHD than in the MHD.
59

0102030405060708090
100
0 20 40 60 80 100 120
time [τA]
ε=0.1 |V|ε=0.1 |V|ε=0.0 |V|ε=0.0 |V|
|V|/
|V|,
|V|/
|V|
[%]
ε=0.1 |V|
ε=0.0 |V|
ε=0.1 |V|ε=0.1 |V|
ε=0.0 |V|ε=0.0 |V|
0 20 40 60 80 100 1200
0.05
0.1
0.15
0.2
0.25
time [τA]
Kin
etic
Ene
rgy
[VA]2
22
22
Figure 3.8: Time evolution of kinetic energy. Left panel shows the absolute
value of the total, the parallel/perpendicular component of kinetic energies.
Right panel shows the percentages of the parallel/perpendicular components
to the total kinetic energy.
60

(a) distribution of a (b) distribution of b
Figure 3.9: Snapshots of the distribution of the alignment coefficients in
the Beltrami condition a, b, which correspond to electron and ion. Electron
motion aligns well to its corresponding vorticity, while ion flow deviates from
its vorticity outside the magnetic columns.
61

(a) pressure (b) velocity
Figure 3.10: Snapshot of pressure and velocity distribution in the poloidal
cross section. Dynamic pressure is much less than static pressure because of
large initial beta.
62

H2’
time [τA]0 20 40 60 80 100 120 140 160 180 200
0
0.5
1
1.5
2
2.5
3
3.5
F’
H1
E
Figure 3.11: Time evolution of energy (E), helicities (H1, H′2) and enstrophy
(F ′). H ′2 decrease faster than E. H1 keeps its conservation better than E
and H ′2. F ′ initially grows because F ′ is not a constant of motion.
63

1 10 100 1e-07
1e-06
1e-05
0.0001
0.001
0.01
0.1
|ka|
E(k
a)
t=30τΑ
t=40τΑt=100τΑ
|ka|
H(k
a)
1 10 100 1e-07
1e-06
1e-05
0.0001
0.001
0.01
0.1
t=30τΑt=40τΑ
t=100τΑ
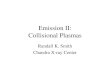
Figure 3.12: Spectrum of magnetic energy and magnetic helicity. Energy
cascades down to high wavenumber modes, and helicity cascade up to low
wavenumber modes.
64

Chapter 4
Nonlinear Mechanism of
Collisionless Resistivity
65

4.1 Introduction
Spatial variations of electromagnetic fields yield nonlinearity in charged par-
ticle dynamics. Chaotic motion of particles is an important mechanism of
producing resistivity in an almost collisionless plasma [55,77,78]. A strongly
inhomogeneous magnetic field including null points breaks the conservation
of adiabatic invariants. The increase of the degree of freedom can result in
chaotic motion of particles. The mixing effect of chaos brings about rapid
increase of the kinetic entropy in a collisionless plasma, which, however, is
not sufficient to yield a diffusion-type dissipation. When a test particle is
confined in a bounded domain of the phase space, the second cumulant of the
velocity distribution saturates after the initial mixing phase, and hence, the
diffusion constant (the time derivative of the second cumulant) diminishes
to zero. However, in an open system where particles can convect into/out a
chaotic region of the phase space (either through coordinate or momentum
axes), particles are heated locally during a certain staying time in the chaos
region, and continuous dissipation process is achieved there [55].
In this chapter, we study the motion of particles in a Y-shape magnetic
field with perpendicular electric field (Fig. 4.1). If particles are far from
the magnetic null point, they are magnetized and describe ordered E ×
66

B drift orbits. However, motion of particles become chaotic in a certain
neighborhood of the null point. By analyzing motion of many particles (we
consider independent particles ignoring collisions), we observe collisionless
heating of particles in the chaos region. This is in marked contrast to the
motion of magnetized particles which cannot gain energy from a stationary
electric field because of the periodicity of motion. Evaluating the average
velocity of particles in the direction parallel to the electric field, we may
estimate the effective collisionless resistivity.
This theory may be applied to various collisionless magnetic diffusion
phenomena, especially to fast magnetic reconnections leading to changes of
magnetic topologies [55, 56, 77–80]. Tearing modes in tokamaks, magnetic
substorms or solar flares are significantly accelerated by “anomalous resis-
tivities”. Wave-particle interactions (through lower hybrid drift instabili-
ties) [79] or stochasticity of magnetic field lines [80] have been studied to
account for enhanced resistivities. The collisionless resistivity studied here
stems in microscopic particle dynamics that cannot be studied by a fluid
model or the Vlasov equation. We consider magnetic null points that un-
magnetize particles and cause highly non-integrable motion. The resultant
rapid entropy production may be applied to overcome the difficulty of the
67

Petschek model of magnetic reconnections [56].
The standard normalization of Newton’s equation of motion shows that
the particle inertial effect (kinetic effect) works in a length scale of the skin
depth (Sec. 4.2). Single particle motion is analyzed in Sec. 4.3. We in-
troduce an ensemble-averaged “local Lyapunov exponent”, and specify the
“chaos region”. The spatial inhomogeneity of the system is essential – the
randomization of orbits and the resultant resistivity are strongly localized in
neighborhoods of null points. Particle convection connects the chaos region
and the outside regular region, and hence, the chaos region (not a priori
determined) must be treated as an open system. In Sec. 4.4, we study the
statistical distribution of chaotic particles. The chaos-induced resistivity is
scaled by the Alfven Mach number, while it does not depend on plasma
temperature. In high temperature plasmas such as solar corona, the present
chaos-induced resistivity is much higher than the classical collisional resis-
tivity.
68

4.2 Model Equations
We consider a 2D Y-shape (and X-shape as the degenerate case) magnetic
field (Fig. 4.1) that can be written as (in Cartesian coordinates)
B =
(b0(y ∓ `y)/`x, b0x/`x, 0) (|y| > `y)
(0, b0x/`x, 0) (|y| ≤ `y)
, (4.1)
where b0, `x and `y are constant numbers. The plane of x = 0, |y| ≤ `y is
called a neutral sheet where the magnetic field vanishes. We apply a constant
electric field in the direction perpendicular to the magnetic field;
E = e0ez = −∇φ, (4.2)
where e0 is a constant number, ez = ∇z and φ is the electro-static potential.
The potentials are given by
Az(x, y) =
b02`x
[(y ∓ `y)2 − x2] (|y| > `y)
− b02`x
x2 (|y| ≤ `y)
,
φ(z) = −e0z.
(4.3)
The Hamiltonian of a single particle includes all three coordinates, so that
the orbit is generally non-integrable (chaotic) [2]. In the neighborhood of the
Y-points, particles describe chaotic orbits receiving almost random sequences
of acceleration and deceleration from the electric field. As we will show later,
69

the resultant randomization of orbits yields a collisionless resistivity. On
the other hands, outside this “chaos region” (to be specified more quanti-
tatively in Sec. 4.3.2), the magnetic field is sufficiently strong to magnetize
particles (the magnetic moment µ ≡ mv2⊥/2B conserves), and the guiding
centers describe E×B drift orbits. The drift motion causes a flow that sup-
plies/extracts particles to/from the chaos region. This convection plays an
essential role to enable a continuous production of heat in the chaos region.
We study collisionless motion of charged particles governed by Newton’s
equation with the given fields (4.1) and (4.2);
mdv
dt= q(E + v ×B), (4.4)
where m and q are the mass and the charge, respectively, and v is the velocity
of a particle. We normalize variables as
x = `xx, B = b0b, t = τAt,
v = vAv, E = (mAvAb0)e,
(4.5)
where b0 is an appropriate measure of the magnetic field, vA is the Alfven
velocity corresponding to b0, τA ≡ `x/vA, and mA is the Alfven Mach num-
ber (mAvA gives the E ×B-drift convection speed). Using the normalized
variables, (4.4) reads
δ
`x
dv
dt= mAe + v × b, (4.6)
70

where δ = vA/ωc is the collisionless skin depth and
b =
(y ∓ `, x, 0) (|y| > `)
(0, x, 0) (|y| ≤ `)
, (4.7)
where ` ≡ `y/`x. The left-hand side of (4.6) gives the “kinetic effect” that
enables deviation from the E ×B-drift motion (principal part of the ideal
MHD flow), resulting in chaotic orbits. In what follows, we take `x = δ to
emphasize the kinetic effect (hence, τ−1A = ωc: cyclotron frequency). If we
define ωc including the sign of the charge (ωc is positive for ions and negative
for electrons), (4.6) can be applied for both ions and electrons.
4.3 Single Particle Dynamics
4.3.1 Chaotic Orbit
Figure 4.2 shows two types of orbits projected onto an x − y plane. In
Fig. 4.2(a), we observe that a particle moves irregularly near the Y-points
while it becomes more regular near the asymptotic line of the magnetic field.
Because of the mirror effect of the magnetic field, a particle goes back to the
chaos region and confined there for a certain time. In Fig. 4.2(b), a larger
electric field (mA = 0.01) is applied. After a relatively short staying time,
71

the particle escapes from the chaos region.
In Fig. 4.3, we plot the average staying time (τ1 ≡ τ1/τA) as a function
of mA. We may approximate τ1 ≈ m−1A . This relation does not depend
significantly on ` as far as ` . 10. In the limit of ` →∞, the magnetic field
becomes 1D and the orbit becomes integrable. Sufficiently large τ1 (relative
to the Lyapunov exponent (see the next section)) is required to yield an
appreciable entropy production in the chaos region. This condition demands
mA . 10−2 (4.8)
4.3.2 Lyapunov Exponents
The maximum Lyapunov exponent of a given orbit characterizes the mean
divergence rate of nearby orbits. In a chaotic system, it provides a quanti-
tative measure of the degree of stochasticity. First, we define a quantity to
measure divergence of two trajectories in a unit time,
χ(t) ≡ 1
∆tlog
|δx(t + ∆t)||δx(t)| , (4.9)
where δx is a distance of initially neighboring two trajectories (a basis vector
in the most divergent direction). Here we set ∆t = 10−2τA, |δx| = 10−2`x.
To detect the principal axis of the Hessian, we reorthonormalize the basis
72

vector using the Gram-Schmidt method to find the most rapidly growing
direction [81]. The conventional maximum Lyapunov exponent is defined by
taking a long-time average of χ(t) over a certain orbit [2, 82]; i.e., choosing
sufficiently small ∆t and |δx|, one may calculate
χ ≡ limN→∞
1
N∆t
N∑n=0
χ(tn)∆t. (4.10)
However, this definition is not suitable when we consider an open system
where the particle staying time is finite. To quantify the degree of stochas-
ticity for a temporally and spatially finite chaotic phase of motion, we take
an ensemble average, instead of the long-time average, to define a temporally
and spatially local maximum Lyapunov exponent (LLE) [83];
χ(t) ≡ 〈χ(t)〉. (4.11)
The ensemble average 〈·〉 is taken for the particles contained in a given region
defined as follows: Particles are initially distributed uniformly in the region
−1.0 < x, y < 1.0 and −0.5 < vx, vy, vz < 0.5 (total number is 5 × 104).
We consider subdomains Ω(R) scaled by the distance from the Y-points;
R ≡√
x2 + (y − `)2. To measure the strength of chaos near the Y-points,
we evaluate LLE for the ensemble of particles remaining in Ω(R). In Fig. 4.4,
we plot LLEs (for different Ω(R)) as functions of t. For larger R (R & 1),
73

the LLE decreases as t increases, simply that Ω(R) contains regions where
particle motion becomes regular. A stationary value of LLE is observed for
R . 1. Hence, we may call Ω(1) the chaos region where the LLE is about
0.25.
In Fig. 4.5, we compare the LLEs for different mA’s (and hence, for dif-
ferent staying times). For mA < 0.01, the LLEs have a plateau at the same
level (LLE ' 0.25). When mA & 0.01, however, the plateau is lost because
all particles are swept out from the chaos region before they are randomized.
4.4 Statistical Distribution and Macroscopic
Resistivity
4.4.1 Velocity Distribution
Macroscopic quantities, such as temperature and resistivity, are calculated
invoking many particles, that obey the same equation of motion with random
initial conditions; initial velocities and positions have a uniform distribution
in the domain of −0.5 < vx, vy, vz < 0.5 and −1.0 < x, y < 1.0. In Figs. 4.6
(a) – (c), we plot the velocity distributions of the particles in the chaos
74

region Ω(1) with the Gaussian fitting curves. In the initial phase (t ∼ χ−1 '
4), particles relax into almost isotropic Gaussian distributions. Temporal
evolutions of the distributions are shown in Figs. 4.6 (d) – (f). The total
number of particles decrease because of the loss of particles from the chaos
region. The peak of distribution of vz gradually shifts in the direction of
the electric field. The velocity distributions have cut off around |v| ∼ 0.8 ,
implying that particles with |v| & 0.8 are lost from the chaos region. Indeed,
if |v| & 0.8, the particle passes the chaos region in a unit time and such a
high energy particle can not be scattered by the Y-points.
Figure 4.7 shows the standard deviations (temperatures) of the velocity
distributions. We observe that the temperatures increase in x and y direc-
tions. In the direction of the electric field (z direction), particles have an
average flow velocity. The distribution is strongly distorted in the region
vz & 1, and the standard deviation decreases.
4.4.2 Effective Resistivity
We may estimate the effective collisionless resistivity from the evolution of the
average velocity in the direction of the electric field (Fig. 4.8). The ensemble
average is taken over the particles in the chaos region Ω(1). Particles in the
75

chaos region are accelerated monotonically; we may write
ˆvz(t) ' αt with α = 3.48× 10−4. (4.12)
However, the number of particles in the chaos region decreases exponentially;
n(t) ' n0 exp(−βt) with β = 2.17× 10−3. (4.13)
We may consider a system where the total number of particles are conserved
with supplying particles with zero average velocity; this model is more ap-
propriate to simulate a convecting system with a driving electric field. Using
(4.12) and (4.13), we obtain the average velocity in such a sustained system;
ˆvw(t) =α
β[1− exp(−βt)]. (4.14)
The macroscopic velocity may be modeled by a dissipative evolution equa-
tion
ρeffdˆvz
dt= mAe− νeff ˆvz, (4.15)
where ˆvz is the normalized average velocity in z direction, ρeff is the effective
mass normalized by the particle mass, and νeff is an effective collision fre-
quency normalized by ωc. To explain the meaning of the effective mass, let
us first assume ρeff = 1. Then, the solution of (4.15) becomes
ˆvz =mA
νeff
[1− exp
(−νeff t)]
. (4.16)
76

Evaluating νeff from the time constant of the numerical result (see (4.14)),
we obtain the saturation level of the velocity;
ˆvsat =mA
νeff
, (4.17)
which translates as E/(vAb0) = νeff(vsat/vA) in the physical units. Comparing
this relation with Ohm’s law (j is the current density, n is the number density,
q is the electric charge)
E = ηeffj = ηeffnqvsat, (4.18)
we obtain
ηeff,1
µ0
= δ2ωcνeff . (4.19)
We can derive another resistivity directly from the saturation level. By sub-
stituting the value of ˆvsat into (4.18), we obtain
ηeff,2
µ0
= δ2ωcmA
ˆvsat
. (4.20)
These two resistivities (ηeff,1 and ηeff,2) do not agree, because (4.15) is a
phenomenological model – the microscopic magnetic force qv×B is absorbed
both in the frictional and inertia terms in the averaged (macroscopic) model.
By adjusting the mass to ρeff in the inertia term of (4.15), the solution of
(4.15) modifies as
ˆvz =mA
νeff
[1− exp
(− νeff
ρeff
t
)]. (4.21)
77

By plugging (4.14) and (4.21), we obtain
νeff = 6.2× 10−3, (4.22)
ρeff = 2.9. (4.23)
The effective resistivity is given by (in physical units),
ηeff
µ0
= δ2ω2cνeff . (4.24)
4.5 Fast Magnetic Reconnection
To apply the chaos-induced resistivity for the theory of flare, we introduce
a “mesoscopic model” of the diffusion region to relate the microscopic and
macroscopic quantities. For the macroscopic configuration, we consider a
Petschek-type shock structure (Fig. 4.10). We assume that the dissipation
region (D) includes multiple chaos regions (Fig. 4.1) that have the length
scale `x = δi. The ion skin depth δi is naturally derived in the two-fluid
model. The “singular perturbation” given by the Hall term can connect
small scales (∼ δi) with large scales. The magnetic and flow velocity fields in
the region (D) may take double Beltrami-type configurations [53] where small
scale vortices couple with large scale fields through the Hall term, producing
78

a jittery structure. At the scale of δi, the kinetic effect of ions produces a
strong collisionless dissipation, while that of electrons is negligible. Simu-
lation studies [84, 85] demonstrate creation of ion-current dominant current
sheets (see also [86]).
Let us summarize the microscopic relations. The staying time τ1 is scaled
by mA (Fig. 4.3), and τ1 must be much longer than the reciprocal of the
Lyapunov exponent, demanding (4.8). In the effective resistivity (4.20), we
estimate νeff ≈ 6 × 10−3. The magnetic field (4.1) must be consistent to
the average current j = η−1eff E through j = µ−1
0 ∇ × B, which reads as
η−1eff mAvAb0 ' b0/(µ0`x) because the ion current is dominant. Using (4.20),
this relation translates as νeff ' mA`x/δi (= mA), which is consistently sat-
isfied with (4.8) and (4.23).
In the macroscopic level, we consider a diffusion region (D) with a thick-
ness 2Lδ and horizontal scale 2L′ (Fig. 4.10). Denoting , the quantities in
the upstreams/downstreams of the flow by subscripts 1 and 2, respectively,
(we use capital letters for the macroscopic quantities), the Rankine-Hugoniot
condition reads |V 2| ≈ V2y ≈ VA, where VA is the Alfven velocity for B1. We
define a macroscopic Alfven Mach number by MA = V1y/VA that scales the
reconnection rate. The divergence-free conditions of the magnetic field and
79

velocity field read
Lδ
L′=
B2x
B1y
=V1x
V2y
= MA. (4.25)
To match the microscopic and macroscopic parameters, we need to in-
troduce a “mesoscopic” model for the dissipation region (D). Assuming a
uniform electric field, we estimate
E = V1xB1y = MAVAB1y ' v0b0 = mAvAb0, (4.26)
which gives MA = mA(b0/B1y)2. The microscopic magnetic field [b0; see
(4.1)] is at most B1y, and hence (4.8) yields a bound
MA . mA . 10−2, (4.27)
which accounts well for the observed time scale of flares.
The energy estimate leads to a relation between the length scales of
macroscopic and microscopic regions. Poynting’s theorem and (4.25) give
∫
D
E · jdx = − 1
µ0
∫
S
E ×B · ndS
=4
µ0
(1−M2A)B2
1yVALδ, (4.28)
where S is the boundary of the dissipation region (D). The left-hand side
of (4.28) represents the total energy dissipation in (D). Using (4.20), we
80

estimate∫
D
E · jdx =N∑
k=1
∫
Ωk
ηeffj2
µ20
dx ' Nδ2i ωciνeff
b20
µ0
, (4.29)
where Ωk (k = 1, · · · , N) are chaos regions included in the diffusion region.
The energy dissipation is dominated by the ion current. Combining (4.28)
and (4.29), we obtain
Lδ ' Nδ2i ωciνeffb2
0
4(1−M2A)B2
1yVA
. Nδi4
νeff . (4.30)
Because Lδ must be larger than δi, the single chaos region (N = 1) cannot
produce a fast (shock-type) reconnection, even though the effective resistivity
is much enhanced.
4.6 Summary
We have shown that Y-points of magnetic fields act as scattering centers
producing a strong effective resistivity for ions. The flow of particles across
the chaos region is essential to yield a diffusion-type collisionless dissipa-
tion. The average staying time of ions in the chaos region, relative to the
temporary local Lyapunov exponent, is the key parameter that restricts the
maximum electric field. To apply this chaos-induced resistivity in a fast
(shock-type) reconnection process, we have introduced a mesoscopic model
81

and have derived a relation (4.30) connecting the macroscopic scale (Lδ) and
the microscopic parameters (δi and νeff) in a “universal form” (Lδ ∝ νeff)
with a mesoscopic coefficient N . At the small scale of the order of δi, the ki-
netic effect (chaos) produces a strong collisionless dissipation, giving a lower
bound for the length scale. Hence, we can remove the unphysical length
scale reduction (down to the sub-gyroradius regime) deduced from the direct
application of the single-fluid MHD in the original Petschek model, which is
incapable of encompassing the huge scale separation.
Chaotic motion of particles in strongly inhomogeneous magnetic fields is a
simple and direct route to produce a collisionless resistivity. In magnetic null
regions, particles are unmagnetized and describe extremely complex orbits,
which invalidates theoretical models based on wave-particle interactions [79]
or stochastic motion of magnetized fluids [80].
In an inhomogeneous magnetic field, charged particles describe chaotic
orbits. The randomization of the phase of cyclotron motion enables particles
to receive net acceleration from the electric field. The phenomenological dis-
sipation equation is introduced to evaluate a current parallel to the electric
field. In a macroscopic model (4.15), the chaotic randomization effect (v×B
term in the particle model (4.4)) is described by both the effective collision
82

frequency and the effective mass. Only the effective collision frequency is
not sufficient to account for the chaos effect. From the effective collision
frequency, we obtain a collisionless effective resistivity. In absence of mutual
interactions among particles, we may construct a stationary state by supply-
ing new particles that are just replicas of particles with shifted initial times.
The velocity distributions of particles broaden, and achieve almost isotropic
Gaussian distribution. The average staying time of particles in the chaos
region, relative to the maximum LLE, is the key parameter that restricts
the maximum electric field (or the Mach number) to yield an appreciable
resistivity – too large electric field sweeps out particles from the chaos region
before they are randomized.
The “chaos-induced resistivity” is proportional to the square of the Alfven
velocity (vA = δωc), which is a function of the magnetic field and the plasma
density. On the other hand, the classical collisional resistivity (Spitzer resis-
tivity [87]) is a function of the electron temperature (∝ T−3/2e ). In a high
temperature plasma, the chaos-induced resistivity (ηeff) can be much larger
than the classical collisional resistivity. For example, if we take typical pa-
rameters of the solar corona (n = 1016m−3, B0 = 10−2T, Te = 102eV), ηeff
is about 104 times larger than the collisional resistivity. The chaos-induced
83

resistivity occurs both in ions and electrons. Ions contribute much larger
dissipation than electrons, because the size of the ion chaos region (scaled
by the skin depth) is much larger than that of electrons. This chaos-induced
resistivity has been applied to explain the fast (shock-type) reconnection
process. Introducing a mesoscopic model in the diffusion region [56], we
may avoid the unphysical scale reduction problem that Petschek’s model [58]
encountered. The bound for the Mach number restricting this collisionless
resistivity explains the time scale of the fast reconnection.
84

2ly
Chaos Region
x
y
2lx
Figure 4.1: A Y-shape magnetic field with ` ≡ `y/`x = 2 projected onto
the x-y plane. (x and y coordinates are normalized to the system size `x).
The chaos region (hatched region) is defined by using the local Lyapunov
exponents in Sec. 4.3.2.
85

(b) mA=0.01(a) mA=0.001
x/lx
-10 -5 0 5 10
y/lx
-10
-8
-6
-4
-2
0
2
4
6
8
10
-10 -5 0 5 10-10
-8
-6
-4
-2
0
2
4
6
8
10
x/lx
y/lx
Figure 4.2: Typical particle orbit in a Y-shape magnetic field with ` =
1. Dotted line shows the asymptotic line of the magnetic field. Motions
are qualitatively the same for both figures, however, the staying times are
different for different mA’s. In (b), the particle is swept out before it is
randomized sufficiently.
86

10
100
1000
10000
0.001 0.01
l = 1
mA
= 2= 5=10
τ1/τ
A
Figure 4.3: Average staying time in the chaos region (τ1) as a function of
mA.
87

0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0 100 200 300 400 500 600
Max
imum
Lya
puno
v E
xpon
ent
R=0.8R=1.0R=1.2R=1.5
time [τA]
Figure 4.4: Local Lyapunov exponents for different subdomains Ω(R) (mA =
0.002). We define the chaos region such that the local Lyapunov exponents
have a plateau R . 1.0.
88

-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0 100 200 300 400 500 600 700 800 900 1000
Max
imum
Lya
puno
v E
xpon
ent
mA=0.001mA=0.002mA=0.005mA=0.010mA=0.020
time[τA]
Figure 4.5: Local Lyapunov exponents for different mA’s. For larger mA, the
local Lyapunov exponents are strongly damped and have no plateau region.
89

50
100
150
200
250
300
350
400
450
-1 -0.5 0 0.5 1
Num
ber
of P
arti
cles Gaussian
t =10
vx/vA
50
100
150
200
250
300
350
400
450
-1 -0.5 0 0.5 1
Num
ber
of P
arti
cles Gaussian
t =10
vy/vA
50
100
150
200
250
300
350
400
-1 -0.5 0 0.5 1
Num
ber
of P
arti
cles Gaussian
t =10
vz/vA
1
10
100
1000
-1 -0.5 0 0.5 1
Num
ber
of P
arti
cles
vz/vA
t=0
t=406t=200
t=602t=798t=968
1
10
100
1000
-1 -0.5 0 0.5 1
Num
ber
of P
arti
cles
t=0
t=406t=200
t=602t=798t=968
vy/vA
1
10
100
1000
-1 -0.5 0 0.5 1
Num
ber
of P
arti
cles
t=0
t=406t=200
t=602t=798t=968
vx/vA
(a)
(b)
(c)
(d)
(e)
(f)
Figure 4.6: Velocity distributions in the chaos region (mA = 0.001, ` = 0).
(a)-(c): distributions of vx, vy, vz, after initial randomization phase with the
Gaussian fitting curves. (d)-(f): temporal evolutions of the distributions of
vx, vy, vz. 90

0.16
0.18
0.2
0.22
0.24
0.26
0.28
0.3
0 100 200 300 400 500 600 700 800 900 1000
stan
dard
dev
iati
on
vxvyvz
time[τA]
Figure 4.7: Standard deviations of the velocity distribution (mA = 0.001, ` =
0).
91

Numerical Result
0 100 200 300 400 500 600 700 800 900 10000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
vw(t)=α/β exp(-βt)vz(t)=αt
vz/v
A
time [τA]
Figure 4.8: Evolution of the average velocity in the direction of the electric
field (mA = 0.001, ` = 0). The ensemble constants of the particles remaining
in the chaos region. The average velocity increases linearly. Dotted line shows
a linear fitting curve. Dot-dashed line shows the average velocity weighted
by the number of particles (4.14).
92

100
1000
10000
100000
0 100 200 300 400 500 600 700 800 900 1000
Num
ber
of P
artic
les
Numerical Resultn(t)=n0exp(-βt)
time [τA]
Figure 4.9: Evolution of the number of particles in the chaos region. The
number decreases exponentially.
93

x
y
shock frontB1yV1x
Region I
2L’Region I
V2yB2x
Region Dv0 b0
2Lδ
Figure 4.10: Petschek-type fast reconnection model. The regions (I) and (D)
are the ideal MHD and dissipation regions, respectively.
94

Chapter 5
Concluding Remarks
95

In this thesis, two nonlinear process in two-fluid plasmas are studied. One
is the self-organization of the Hall-MHD plasmas, and the other is the chaos
of the particle motion in an inhomogeneous electromagnetic field.
In Chap. 2, we have introduced the Hall-MHD equations and theoreti-
cal model of equilibrium. In the Hall-MHD plasmas, the Hall term leads
a singular perturbation which enables the coupling of two different spatial
scale vortices. The resultant double Beltrami equilibrium can span far richer
set of magneto-fluid coupled state than the well-known Taylor’s force-free
state. The relaxation process has been discussed in terms of the variational
principle.
Chapter 3 is devoted to the numerical analysis of the Hall-MHD plasmas.
Based on the theory of the double Beltrami equilibrium, we have developed
the Hall-MHD simulation code and examine the relaxed state. Compared
with the single-fluid MHD, appreciable flow perpendicular to the magnetic
field highlights the difference between the self-organization process in two
models. The relaxation process is achieved by minimizing the generalized
enstrophy with the adjustment of global invariants. In the Hall-MHD plasma,
the energy cannot be the minimizer because more coercive functional, the ion
helicity, dissipate faster than the others as the result of severe adjustment.
96

In Chap. 4, we have analyzed the dissipation mechanism due to the chaos
of particle motion. Inhomogeneity in the ion skin depth scale of the mag-
netic field including null points can acts as the scattering center of particle
orbit and produce collisionless resistivity. We have introduced diagnostic
tools of statistical properties of the chaotic particles such as the local Lya-
punov exponents and specify responsible chaos region. The chaos-induced
resistivity has been applied to the fast magnetic reconnection process. By
introducing the mesoscopic scale structure, we have succeed in construct-
ing self-consistent magnetic reconnection model which explains the fast time
scale magnetic reconnection, and avoids unphysical scale reduction problem
that Petschek’s model encountered. The mesoscopic structure where jittery
structure of the ion skin depth scale may take double Beltrami-type config-
uration. We suggest that the scale hierarchy of the magnetic reconnection
shown in Fig. 5.1 (See Shibata and Tanuma [88], or Kan [89] concerning the
mesoscopic diffusion region.)
97

x
y
shock front
2L’
Macroscopic
Global Scale
Mesoscopic
Diffusion Region
Microscopic
~ Ion skin depth
2δ
Double Beltrami Field ?
2ly
Chaos Region x
y
2lx
Figure 5.1: Hierarchy of the scale in the magnetic reconnection process.
98

Acknowledgments
99

I would like to express my sincerest appreciation to many peoples for their
helpful supports during my PhD work.
First of all, I would like to express my deepest gratitude to my supervi-
sor Professor Zensho Yoshida. His insightful comments based on very wide
and deep knowledge about plasma physics and mathematical physics, have
improved my understandings. Without his guidance, I could not have com-
pleted this work.
I also thank Professor Takaya Hayashi in the National Institute for Fu-
sion Science. During the cooperation with him as the special joint research
fellow, I learned a lot of practical things related to the large scale numerical
simulation using supercomputer.
Professors Yuichi Ogawa, Haruhiko Himura, Junji Morikawa in the Uni-
versity of Tokyo, Ritoku Horiuchi, Sigeo Kida in the National Institute for
Fusion Science kindly gave me many fruitful comments. Professors Vazha
Berezhiani, Nana Shatashvili in Georgian Academy of Science, Hamid Saleem
in Pakistan Institute of Nuclear Science and Technology, Robert Dewar in
the Australian National University were visiting professors in the University
of Tokyo, who kindly teach me a lot of topics in plasma physics through
seminars. Swadesh Mahajan in the University of Texas whom I met in the
100

autumn college on the plasma physics held in the International Center for
Theoretical Physics also kindly gave me suggestions.
I am grateful to Doctors Tomoya Tatsuno, Shigeo Kondoh, Atsushi Ito,
Francesco Volponi, Shuichi Ohsaki and all other members in the laboratory
at Graduate School of Frontier Sciences, the University of Tokyo and the
Theory and Computer Simulation Center in the National Institute for Fusion
Science. I learned a lot of things through the study with them.
Finally, I would express my gratitude to my parents and sister, and all
my friends for their support during my study.
101

Bibliography
102

[1] A. Hasegawa, Adv. Phys. 34, 1 (1985).
[2] A.J. Lichtenberg, M.A. Lieberman, Regular and Chaotic Dynamics
(Springer-Verlag, New York, 1992).
[3] W. Horton, Y-H Ichikawa, Chaos and Structures in Nonlinear Plasmas
(World Scientific, Singapore, 1996).
[4] H.A.B. Bodin and A.A. Newton, Nucl. Fusion 20, 1255 (1980).
[5] E.P. Butt et al., in Plasma Physics and Controlled Nuclear Fusion Re-
search (Proc. 2nd Int. Conf. Culham, 1965) 2, 751 (1966).
[6] J.B. Taylor, Phys. Rev. Lett. 33, 1139 (1974); J.B. Taylor, Rev. Mod.
Phys. 58, 741 (1986).
[7] L. Woltjer, Proc. Natn. Acad. Sci. U.S.A. 44, 489 (1958).
[8] D. Montgomery et al., Phys. Fluids 21, 757 (1978).
[9] R. Horiuchi and T. Sato, Phys. Rev. Lett. 55, 211 (1985).
[10] R. Horiuchi and T. Sato, Phys. Fluids 29, 1161 (1986).
[11] R. Horiuchi and T. Sato, Phys. Fluids 31(5), 1142 (1988).
[12] M. Dobrowolny et al., Phys. Rev. Lett. 45, 144 (1980).
103

[13] R. Grappin et al, Astron. Astrophys., 105, 6 (1982).
[14] W.H. Matthaeus et al., Phys. Rev. Lett. 51, 1484 (1983).
[15] T. Stribling and W.H. Matthaeus, Phys. Fluids B3(8), 1848 (1991).
[16] J. Heyvaerts and E.R. Priest, Astron. Astrophys. 137, 63 (1984).
[17] P.K. Browning, Plasma Phys. Cont. Fusion 30, 1 (1988).
[18] G.E. Vekstein, Astron Astrophys. 182, 405 (1990).
[19] A.N. Kolmogorov, Dokl. Akad. Nauk SSSR 30, 301 (1941).
[20] R.H. Kraichnan, Phys. Fluids 10, 1417 (1967).
[21] P.S. Iroshnikov, Sov. Astron. 7, 566 (1964).
[22] R.H. Kraichnan, Phys. Fluids 8,1385 (1965).
[23] J.V. Shebalin et al., J. Plasma Phys. 29, 525 (1983).
[24] S. Sridhar and P. Goldreich, Astrophys. J. 432, 612 (1994).
[25] P. Goldreich and S. Sridhar, Astrophys. J. 438, 763 (1995).
[26] D. Montgomery and W.H. Matthaeus, Astrophys. J. 447, 706 (1995).
[27] J. Cho and E.T. Vishniac, Astrophys. J. 539, 273 (2000).
104

[28] L.J. Milano et al., Phys. Plasmas 8, 398 (2001).
[29] A.J. Chorin, J. Comp. Phys. 2, 1 (1967).
[30] S.A. Orszag and G.S. Patterson, in Statistical Models and Turbulence,
Lecture Notes in Physics, edited by M. Rosenblatt and C.W. Van Atta
(springer-Verlag, Berlin), Vol. 12, p.127.
[31] S. Kida and S. Yanase, Turbulence Dynamics (Asakura, Tokyo, 1999) in
Japanese.
[32] D. Biskamp, Magnetohydrodynamic Turbulence (Cambridge University
Press, Cambridge, 2003).
[33] K.R. Sreenivasan, Rev. Mod. Phys. 71, S383 (1999).
[34] R. Himeno et al., J. Plasma Fusion Res. 79, 752 (2003).
[35] Y. Kaneda et al., Phys. Fluids 15, L21 (2003).
[36] T. Sato, Chemistry 58, 28 (2003) in Japanese; T. Sato, Butsuri 58, 84
(2003) in Japanee.
[37] W.C. Muller and D. Biskamp, Phys. Rev. Lett. 84, 475 (2000);
D. Biskamp and W.C. Muller, Phys. Plasmas 7, 4889 (2000).
105

[38] R.Z. Sagdeev et al., Sov. J. Plasma Phys. 4, 306 (1978).
[39] A. Hasegawa and M. Wakatani, Phys. Rev. Lett. 59, 1581 (1987).
[40] Z. Lin et al., Science 281, 1835 (1998).
[41] Y. Idomura, M. Wakatani and S. Tokuda, Phys. Plasmas 7, 3551 (2000).
[42] D. Biskamp, Magnetic Reconnection in Plasmas (Cambridge University
Press, Cambridge, 2000).
[43] E.R. Priest and T. Forbes, Magnetic Reconnection (Cambridge Univer-
sity Press, Cambridge, 2000).
[44] H. Grad, Rev. Mod. Phys. 32, 830 (1960).
[45] E. Hameiri, Phys. Fluids 26(1), 230 (1983).
[46] H. Tasso and G.N. Throumoulopoulos, Phys. Plasmas 5, 2378 (1998).
[47] E.N. Parker, Astrophys. J. 471, 489 (1996); E.N. Parker, Spontaneous
Current Sheets in Magnetic Fields (Oxford University Press, New York,
1994).
[48] J. Birn et al., J. Geophys. Res. 106, 3715 (2001).
106

[49] P.D. Mininni et al., Astrophys. J. 584, 1120 (2003); P.D. Mininni et al.,
Astrophys. J. 587, 472 (2003).
[50] M. Wardle and C. Ng, MNRAS 303, 239 (1999).
[51] S.A. Balbus and C. Terquem, Astrophys. J. 552, 235 (2001).
[52] T. Tajima et al., Astrophys. J. 390, 309 (1992).
[53] S.M. Mahajan and Z. Yoshida, Phys. Rev. Lett. 81, 4863 (1998);
Z. Yoshida et al., Phys. Plasmas 8, 2125 (2001).
[54] Z. Yoshida and S.M. Mahajan, Phys. Rev. Lett. 88, 095001 (2002).
[55] Z. Yoshida et al., Phys. Rev. Lett. 81, 2458 (1998).
[56] R. Numata and Z. Yoshida, Phys. Rev. Lett. 88, 045003 (2002)
[57] T. Tajima, K. Shibata, Plasma Astrophysics (Addison-Wesley, Mas-
sachusetts, 1997).
[58] H.E. Petschek, in AAS-NASA Symposium on Physics of Solar Flares,
edited by W.N. Hess (NASA, Washington, DC, 1964), SP-50.
[59] B.B. Kadomtsev, in Reviews of Plasma Physics, edited by V.D. Shafra-
nov (Kluwer Academic, New York, 2001), Vol. 22, Chap. 4.
107

[60] R.J. Goldston and P.H. Rutherford, Introduction to Plasma Physics
(IOP Publishing, London, 1995), Chap. 6.
[61] K. Nishikawa and M. Wakatani, Plasma Physics (Springer-Verlag,
Berlin, 2000), Chap. 4.
[62] L.D. Landau and E.M. Lifshitz, Fluid Mechanics (Butterworth-
Heinemann, Oxford, 1987), Chap. II.
[63] G.K. Batchelor, An Introduction to Fluid Dynamics (Cambridge Uni-
versity Press, Cambridge, 1967), Chap. 3.
[64] S.I. Braginskii, in Reviews of Plasma Physics, edited by A.M.A. Leon-
tovich (Consultants Bureau, New York, 1965), Vol. 1.
[65] Y. Giga and Z. Yoshida, Comm. PDEs 9(6), 503 (1984.
[66] S. Ohsaki and S.M. Mahajan, will appear in Phys. Plasmas.
[67] C. Vocks et al, Ann. Geophysicae 17, 712 (1999).
[68] Z. Yoshida and Y. Giga, Math. Z. 204, 235 (1990).
[69] Z. Yoshida and S.M. Mahajan, J. Math. Phys. 40, 5091 (1999).
[70] S. Chandrasekhar and P.C. Kendall, Astrophys. J. 126, 457 (1957).
108

[71] A. Reiman, Phys. Fluids 23(1), 230 (1980).
[72] Z. Yoshida, Prog. Theor, Phys. 86, 45 (1991).
[73] T. Kawamura et al., Analysis of Incompressible Flows (University of
Tokyo Press, 1995).
[74] W.H. Press et al., Numerical Recipes in Fortran (Cambridge University
Press, Cambridge, 1992).
[75] P.D. Lax and R.D. Richtmyer, Comm. Pure & Appl. Math. 9, 267
(1956).
[76] R. Horiuchi and T. Sato, Phys. Fluid B1(3), 581 (1989).
[77] J. Egedal and A. Fasoli, Phys. Rev. Lett. 86, 5047 (2001).
[78] W. Horton et al., Phys. Fluids B3, 2192 (1991); W. Horton et al., Geo-
phys. Res. Lett. 18, 1575 (1991).
[79] J.F. Drake and T.T. Lee, Phys. Fluids 24, 1115 (1981).
[80] A.H. Boozer, J. Plasma. Phys. 35, 133 (1986); P.K. Kaw et al., Phys.
Rev. Lett. 43, 1398 (1979); T.H. Stix, Nucl. Fusion 18, 353 (1978).
[81] I. Shimada, T. Nagashima, Prog. Theor. Phys. 61, 1605 (1979).
109

[82] G. Benettin et al., Phys. Rev. A 14, 2338 (1976).
[83] C. Beck, F. Schlogl, Thermodynamics of chaotic systems, an introduc-
tion (Cambridge University Press, Cambridge, 1993), Chap. 15.
[84] M.A. Shay et al., J. Geophys. Res. 103, 9165 (1998).
[85] W. Pei et al., Phys. Rev. Lett. 87, 235003 (2001).
[86] A.A. Galeev, in Basic Plasma Physics, edited by A.A. Galeev and
R.N. Sudan (North-Holland, Amsterdam, 1984), Vol. II, Chap. 6.2.
[87] L. Spitzer, Physics of Fully Ionized Gases (Interscience, New York,
1956).
[88] K. Shibata and S. Tanuma, Earth Planets Space 53, 473 (2001).
[89] J.R. Kan, J. Geophys. Res. 93, 5613 (1988).
110