-
Nonlinear Model Predictive Control
Nonlinear Model Predictive ControlMore than an introduction. .
.
Mazen Alamir 1
1Laboratoire d’Automatique de GrenobleCNRS-INPG-UJF,
[email protected]
Atelier technique
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 1 / 76
-
Nonlinear Model Predictive Control
Regardless of the control strategy being used, the
followingkeywords has to be addressed :
System model(State, control, measurement,
disturbance)Constraints(on state, control)performance
index(Operational cost, energy consumption, tracking
quality)StabilityRobustness
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 2 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
State constraint
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
Performance index :
=
Length of the steering path
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Current state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
Desired state
Initially computed trajectory
Closed loop trajectory
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 3 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situation
Based on the evaluation, compute the best strategyApply the
beginning of the strategy until the next decisioninstantRe-evaluate
the situationRecompute the best strategyApply the first part until
the next decision instantKeep doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situationBased on the
evaluation, compute the best strategy
Apply the beginning of the strategy until the next
decisioninstantRe-evaluate the situationRecompute the best
strategyApply the first part until the next decision instantKeep
doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situationBased on the
evaluation, compute the best strategyApply the beginning of the
strategy until the next decisioninstant
Re-evaluate the situationRecompute the best strategyApply the
first part until the next decision instantKeep doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situationBased on the
evaluation, compute the best strategyApply the beginning of the
strategy until the next decisioninstantRe-evaluate the
situation
Recompute the best strategyApply the first part until the next
decision instantKeep doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situationBased on the
evaluation, compute the best strategyApply the beginning of the
strategy until the next decisioninstantRe-evaluate the
situationRecompute the best strategy
Apply the first part until the next decision instantKeep
doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situationBased on the
evaluation, compute the best strategyApply the beginning of the
strategy until the next decisioninstantRe-evaluate the
situationRecompute the best strategyApply the first part until the
next decision instant
Keep doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (informal)
At each decision instant, evaluate the situationBased on the
evaluation, compute the best strategyApply the beginning of the
strategy until the next decisioninstantRe-evaluate the
situationRecompute the best strategyApply the first part until the
next decision instantKeep doing
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 4 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)
Based on x(k), compute the best sequence of actions :u0(x(k))
:=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)
Apply the control u0(k; x(k)) on the sampling period [k, k +1]At
decision instant k + 1, measure the state x(k + 1)Based on x(k +
1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]
At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]At decision instant k + 1, measure the state x(k + 1)
Based on x(k + 1), compute the best sequence of actions :u0(x(k
+ 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)
Apply the control u0(k + 1; x(k + 1)) on the sampling period[k +
1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A simple feedback principle (Formal)
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 5 / 76
-
Nonlinear Model Predictive Control
A sampled state feedback
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period[k, k +
1]
At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 6 / 76
-
Nonlinear Model Predictive Control
A sampled state feedback
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period[k, k +
1]
At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence of actions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
A state feedback
We have defined a sampled state feedback
u(k) = u0(k; x(k))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 6 / 76
-
Nonlinear Model Predictive Control
A key task . . .
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence ofactions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 7 / 76
-
Nonlinear Model Predictive Control
A key task . . .
At decision instant k, measure the state x(k)Based on x(k),
compute the best sequence of actions :u0(x(k)) :=
(u0(k;x(k)) u0(k + 1;x(k)) . . . u0(k + i;x(k)) . . .
)Apply the control u0(k; x(k)) on the sampling period [k, k
+1]
At decision instant k + 1, measure the state x(k + 1)Based on
x(k + 1), compute the best sequence ofactions :u0(x(k + 1)) :=
(u0(k + 1;x(k + 1)) u0(k + 2;x(k + 1)) . . .
)Apply the control u0(k + 1; x(k + 1)) on the sampling period[k
+ 1, k + 2]
. . .
We need an optimization problem
P(x(k)) : minu
{V (x(k),u) | u ∈ U(x(k))
}u0(x(k)) is A solution of P(x(k))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 7 / 76
-
Nonlinear Model Predictive Control
How to define & Solve P(x) for our example ?
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 8 / 76
-
Nonlinear Model Predictive Control
Step 1 : Write down the system modelDesired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 9 / 76
-
Nonlinear Model Predictive Control
Step 1 : Write down the system modelDesired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 9 / 76
-
Nonlinear Model Predictive Control
Step 1 : Write down the system modelDesired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 9 / 76
-
Nonlinear Model Predictive Control
Step 2 : Obtain the sampled-time model
Given the continuous system
ẋ = fc(x, u)
Compute the implicit τ -discrete dynamics
x+(k) = x(k + 1) = f(x(k), u(k))
where x(k + 1) is the solution at instant τ of
ξ̇ = fc(ξ, u(k)) ; ξ(0) = x(k)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 10 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 11 / 76
-
Nonlinear Model Predictive Control
Some notations before we continue
Consider
x+ = f(x, u)
u := (u(0), u(1), . . . , u(N−1))
Notation
xu(·, x(k)) :={
x(k + i)}N
i=0
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 12 / 76
-
Nonlinear Model Predictive Control
Recall
P(x(k)) : minu
{V (x(k),u) | u ∈ U(x(k))
}u0(x(k)) is A solution of P(x(k))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 13 / 76
-
Nonlinear Model Predictive Control
Step 3 : Write down the constraints
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 14 / 76
-
Nonlinear Model Predictive Control
Step 3 : Write down the constraints
Desired state The final constraint
Obstacle avoidance
Saturation constrainte
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 14 / 76
-
Nonlinear Model Predictive Control
Step 3 : Write down the constraints
Desired state Equality constraints
Inequality constraints
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 14 / 76
-
Nonlinear Model Predictive Control
Step 3 : Write down the constraints
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 14 / 76
-
Nonlinear Model Predictive Control
Recall
P(x(k)) : minu
{V (x(k),u) | u ∈ U(x(k))
}u0(x(k)) is A solution of P(x(k))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 15 / 76
-
Nonlinear Model Predictive Control
Write down the performance index
V (x(k),u) :=N∑
i=1
∥∥xu(i; x(k))− xd∥∥2
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 16 / 76
-
Nonlinear Model Predictive Control
Write down the performance index
V (x(k),u) :=N∑
i=1
∥∥xu(i; x(k))− xd∥∥2
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 16 / 76
-
Nonlinear Model Predictive Control
26/10/05 00:00 MATLAB Command Window 1 of 1
FMINCON finds a constrained minimum of a function of several
variables. FMINCON attempts to solve problems of the form: min F(X)
subject to: A*X
-
Nonlinear Model Predictive Control
Coming next . . .
Existence of solutionsClosed-loop stability
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 18 / 76
-
Nonlinear Model Predictive Control
Existence of solutions
P(x) : minu
{V (x,u) | u ∈ U(x)
}
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}in which U compact ; X compact ; Xf = {xd} ⊂ X closed.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 19 / 76
-
Nonlinear Model Predictive Control
Existence of solutions
P(x) : minu
{V (x,u) | u ∈ U(x)
}
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}in which U compact ; X compact ; Xf = {xd} ⊂ X closed.
No global definition under bounded control
one must have x ∈ XN the subset of states from which Xf is
ac-cessible by N -step controls in U and trajectories in X.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 19 / 76
-
Nonlinear Model Predictive Control
Existence of solutions
P(x) : minu
{V (x,u) | u ∈ U(x)
}
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}in which U compact ; X compact ; Xf = {xd} ⊂ X closed.
for all x ∈ XN , main arguments
V (x, ·) is continuous and U(x) is compact.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 19 / 76
-
Nonlinear Model Predictive Control
Close-loop stability
P(x) : minu
{V (x,u) | u ∈ U(x)
}U(x) :=
{u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
xd = 0 ; Xf = {0} ; f(0, 0) = 0
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 20 / 76
-
Nonlinear Model Predictive Control
Close-loop stability
P(x) : minu
{V (x,u) | u ∈ U(x)
}U(x) :=
{u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
xd = 0 ; Xf = {0} ; f(0, 0) = 0
An optimal solution :
u0(x) :=(u0(0; x) u0(1; x) . . . u0(N − 1; x)
)∈ UN
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 20 / 76
-
Nonlinear Model Predictive Control
Close-loop stability
P(x) : minu
{V (x,u) | u ∈ U(x)
}U(x) :=
{u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
xd = 0 ; Xf = {0} ; f(0, 0) = 0
An optimal solution :
u0(x) :=(u0(0; x) u0(1; x) . . . u0(N − 1; x)
)∈ UN
Sampled state feedback : κ0(x) := u0(0; x)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 20 / 76
-
Nonlinear Model Predictive Control
Study the stability of
x+ = f(x, u0(0; x))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 21 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 22 / 76
-
Nonlinear Model Predictive Control
Closed loop stability
Therefore, on the closed loop trajectory :
V 0(x(k + 1)) ≤ V 0(x(k))− L(x(k), κ0(x(k))
)therefore,
limk→∞
L(x(k), κ0(x(k))
)= 0
Consequently, if L(·, ·) is a continuous positive
definitefunction in x, one has
limk→∞
x(k) = 0
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 23 / 76
-
Nonlinear Model Predictive Control
Close-loop stability
P(x) : minu
{V (x,u) | u ∈ U(x)
}U(x) :=
{u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
xd = 0 ; Xf = {0} ; f(0, 0) = 0
The final equality constraint : A key role
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 24 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 25 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 25 / 76
-
Nonlinear Model Predictive Control
First useful property of Xf = {0}
For all ξ ∈ Xf , there exists an admissible control κf (ξ) such
that :
f(ξ, κf (ξ)) ∈ Xf
(Xf is positively invariant under κf (·))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 26 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 27 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 27 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 27 / 76
-
Nonlinear Model Predictive Control
Second useful property of Xf = {0}
For all ξ ∈ Xf , the admissible control κf (ξ) is such that
:
F (f(ξ, κf (ξ))− F (ξ) ≤ −L(ξ, κf (ξ))
(The terminal cost F (·) is a Lyapunov function for the closed
loopdynamics under κf (·))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 28 / 76
-
Nonlinear Model Predictive Control
First useful property of Xf = {0}
For all ξ ∈ Xf , there exists an admissible control κf (ξ) such
that :
f(ξ, κf (ξ)) ∈ Xf
(Xf is positively invariant under κf (·))
Second useful property of Xf = {0}
For all ξ ∈ Xf , the admissible control κf (ξ) is such that
:
F (f(ξ, κf (ξ))− F (ξ) ≤ −L(ξ, κf (ξ))
(The terminal cost F (·) is a Lyapunov function for the closed
loopdynamics under κf (·))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 29 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
Condition 1 : ContinuityThe applications f , F , L are
continuous in their arguments.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
Condition 2 : CompactnessX U is compactX X and Xf ⊂ X are
closed.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
Condition 3 : DetectabilityThe integral cost L must be such
that{
L(x, u) → 0}
⇒{
x → 0}
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
Condition 4 : Xf is positively invariant under some local κf
(·)For all ξ ∈ Xf , there exists an admissible control κf (ξ) such
that :
f(ξ, κf (ξ)) ∈ Xf
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
Condition 5 : The terminal cost F (·) is a Lyapunov under κf
(·)For all ξ ∈ Xf , the admissible control κf (ξ) is such that
:
F (f(ξ, κf (ξ))− F (ξ) ≤ −L(ξ, κf (ξ))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
Necessary conditions for well defined and stable NMPC scheme
P(x) : minu
{V (x,u) | u ∈ U(x)
}; x+ = f(x, u)
U(x) :={u ∈ UN | ∀i xu(i; x) ∈ X and xu(N, x) ∈ Xf
}V (x,u) = F (x(N ; x)) +
N∑i=0
L(xu(i; x), u(i))
Condition 6 : FeasibilityThere is at least a sequence that meets
the constraints (in particularx(0) ∈ XN (the subset of state
steerable in N steps to Xf withbounded controls in U).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 30 / 76
-
Nonlinear Model Predictive Control
To summarize
The system x+ = f(x, u)
The cost function F (x(N)) +∑N
i=0 L(x(i), u(i))
1) f , L, L are continuous.2) U is compact, X and Xf ⊂ X are
closed.3) {L(x, u) → 0} ⇒ {x → 0}4) Xf is positively invariant
(with some κf (·).5) F (·) is a Lyapunov function under κf (·).6)
x(0) ∈ XN .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 31 / 76
-
Nonlinear Model Predictive Control
How to choose Xf and κf(·) ?
1 Infinite horizon N = ∞.
2 Point-wise final constraint Xf = {0}.3 If the linearized
system at 0 is stabilizable, then
κf (x) = −Kx(A−BK)T P (A−BK)− P = −Q for some P,Q > 0Xf is a
level set of xT Px, namely
Xf ={
x | xT Px ≤ %}
for a sufficiently small % > 0.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 32 / 76
-
Nonlinear Model Predictive Control
How to choose Xf and κf(·) ?
1 Infinite horizon N = ∞.2 Point-wise final constraint Xf =
{0}.
3 If the linearized system at 0 is stabilizable, then
κf (x) = −Kx(A−BK)T P (A−BK)− P = −Q for some P,Q > 0Xf is a
level set of xT Px, namely
Xf ={
x | xT Px ≤ %}
for a sufficiently small % > 0.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 32 / 76
-
Nonlinear Model Predictive Control
How to choose Xf and κf(·) ?
1 Infinite horizon N = ∞.2 Point-wise final constraint Xf =
{0}.3 If the linearized system at 0 is stabilizable, then
κf (x) = −Kx(A−BK)T P (A−BK)− P = −Q for some P,Q > 0Xf is a
level set of xT Px, namely
Xf ={
x | xT Px ≤ %}
for a sufficiently small % > 0.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 32 / 76
-
Nonlinear Model Predictive Control
How to choose Xf and κf(·) ?
1 Infinite horizon N = ∞.2 Point-wise final constraint Xf =
{0}.3 If the linearized system at 0 is stabilizable, then
κf (x) = −Kx
(A−BK)T P (A−BK)− P = −Q for some P,Q > 0Xf is a level set of
xT Px, namely
Xf ={
x | xT Px ≤ %}
for a sufficiently small % > 0.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 32 / 76
-
Nonlinear Model Predictive Control
How to choose Xf and κf(·) ?
1 Infinite horizon N = ∞.2 Point-wise final constraint Xf =
{0}.3 If the linearized system at 0 is stabilizable, then
κf (x) = −Kx(A−BK)T P (A−BK)− P = −Q for some P,Q > 0
Xf is a level set of xT Px, namely
Xf ={
x | xT Px ≤ %}
for a sufficiently small % > 0.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 32 / 76
-
Nonlinear Model Predictive Control
How to choose Xf and κf(·) ?
1 Infinite horizon N = ∞.2 Point-wise final constraint Xf =
{0}.3 If the linearized system at 0 is stabilizable, then
κf (x) = −Kx(A−BK)T P (A−BK)− P = −Q for some P,Q > 0Xf is a
level set of xT Px, namely
Xf ={
x | xT Px ≤ %}
for a sufficiently small % > 0.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 32 / 76
-
Nonlinear Model Predictive Control
Example
x+1 = x1 + (1 + x22)u
x+2 =3
2x2 − x1eu
X Open-loop instable.X The set of equilibrium states is given
by
Est =
{x(α) :=
(α2α
); α ∈ R
}
Control objective starting at x(0) = (0, 0), stabilize thesystem
around x(1) = (1, 2).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 33 / 76
-
Nonlinear Model Predictive Control
Consider the cost function
V (x,u) := F (x(N)) +N∑
i=0
L(x(i), u(i))
where
L(x, u) := ‖x− x(1)‖2 + ru2
F (x) =M−N∑i=1
x0(i; x)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 34 / 76
-
Nonlinear Model Predictive Control
Test 1 : N = 2, M = 2, r = 1
5 10 15 200
0.5
1
1.5
2
2.5
3
x1
5 10 15 200
0.5
1
1.5
2
2.5
3
x2
5 10 15 20−0.5
0
0.5
1
1.5u
5 10 15 200
2
4
6
8
10J
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 35 / 76
-
Nonlinear Model Predictive Control
Test 1 : N = 2, M = 2, r = 1
−1 −0.5 0 0.5 1 1.5 2−1
−0.5
0
0.5
1
1.5
2
2.5
3
Initial state
desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 36 / 76
-
Nonlinear Model Predictive Control
Let us assume that one looks for solution such that u ≤ 0.1
Assume that for that reason one takes
r = 160
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 37 / 76
-
Nonlinear Model Predictive Control
Test 2 : N = 2, M = 2, r = 160
50 100 150 200 250 300−3
−2
−1
0
1
2
3
x1
50 100 150 200 250 300−6
−4
−2
0
2
4
x2
50 100 150 200 250 300−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15u
50 100 150 200 250 3000
20
40
60
80
100J
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 38 / 76
-
Nonlinear Model Predictive Control
Test 2 : N = 2, M = 2, r = 160
−3 −2 −1 0 1 2 3−6
−4
−2
0
2
4
6
Initial state
Desired state
final state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 39 / 76
-
Nonlinear Model Predictive Control
Let us take M = 3 (instead of 2)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 40 / 76
-
Nonlinear Model Predictive Control
Test 3 : N = 2, M = 3, r = 160
10 20 30 40 50−0.5
0
0.5
1
1.5
2
x1
10 20 30 40 500
0.5
1
1.5
2
2.5
3
x2
10 20 30 40 50−0.05
0
0.05
0.1
0.15u
10 20 30 40 500
5
10
15J
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 41 / 76
-
Nonlinear Model Predictive Control
Test 3 : N = 2, M = 3, r = 160
−3 −2 −1 0 1 2 3−6
−4
−2
0
2
4
6
Initial state
Desired state
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 42 / 76
-
Nonlinear Model Predictive Control
Increasing M enabled the target state to be reached.
However, the control is again above 0.1,
So let us increase r again by taking
r = 500
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 43 / 76
-
Nonlinear Model Predictive Control
Test 4 : N = 2, M = 3, r = 500
100 200 300 400 500 600−4
−2
0
2
4
6
8
x1
100 200 300 400 500 600−5
0
5
10
x2
100 200 300 400 500 600−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3u
100 200 300 400 500 6000
50
100
150J
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 44 / 76
-
Nonlinear Model Predictive Control
Test 4 : N = 2, M = 3, r = 500
−4 −2 0 2 4 6 8−5
0
5
10
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 45 / 76
-
Nonlinear Model Predictive Control
A limit cycle appears
and the control is beyond 0.25 ! ! !
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 46 / 76
-
Nonlinear Model Predictive Control
Let us explicitly impose the constraint
U = [−0.1, 0.1]
and test it with the configuration
r = 1 ; N = M = 3
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 47 / 76
-
Nonlinear Model Predictive Control
Test 5 : N = 3, M = 3, r = 1, explicitconstraint |u| ≤ 0.1
20 40 60 80 100−0.5
0
0.5
1
1.5
2
x1
20 40 60 80 1000
0.5
1
1.5
2
2.5
3
x2
20 40 60 80 100
−0.1
−0.05
0
0.05
0.1
0.15u
20 40 60 80 1000
2
4
6
8
10
12
14J
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 48 / 76
-
Nonlinear Model Predictive Control
Test 5 : N = 3, M = 3, r = 1, explicitconstraint |u| ≤ 0.1
−0.5 0 0.5 1 1.5 2−1
−0.5
0
0.5
1
1.5
2
2.5
3
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 49 / 76
-
Nonlinear Model Predictive Control
The example shows that
Nonlinear Model Predictive Control is a "generic" solution.
(Who remember the system’s equations ? ! !)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 50 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 51 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 51 / 76
-
Nonlinear Model Predictive Control
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 51 / 76
-
Nonlinear Model Predictive Control
Computation of the optimal sequence
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 51 / 76
-
Nonlinear Model Predictive Control
The example shows that
Nonlinear Model Predictive Control is a "generic" solution.
Easy handling of constraints
The stability is an issue
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 52 / 76
-
Nonlinear Model Predictive Control
The example shows that
Nonlinear Model Predictive Control is a "generic" solution.
Easy handling of constraints
The stability is an issue
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 52 / 76
-
Nonlinear Model Predictive Control
The example shows that
Nonlinear Model Predictive Control is a "generic" solution.
Easy handling of constraints
The stability is an issue
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 52 / 76
-
Nonlinear Model Predictive Control
To summarize
The system x+ = f(x, u)
The cost function F (x(N)) +∑N
i=0 L(x(i), u(i))
1) f , L, L are continuous.2) U is compact, X and Xf ⊂ X are
closed.3) {L(x, u) → 0} ⇒ {x → 0}4) Xf is positively invariant
(with some κf (·).5) F (·) is a Lyapunov function under κf (·).6)
x(0) ∈ XN .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 53 / 76
-
Nonlinear Model Predictive Control
This general result summarizes 90% of existing works on
thestability of the NMPC schemes.
This does not include the contractive schemes . . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 54 / 76
-
Nonlinear Model Predictive ControlThe basic idea : The
contraction property
A preliminary example
Consider the nonlinear system
ẋ1 = x2 ; ẋ2 = x1u
and the "candidate" Lyapunovfunction
V (x) =1
2
[x21 + x
22
]Compute the derivative of V
V̇ (x) = x1x2(1 + u)
For classical Lyapunov designV is not a good choice
(singular surface x1x2 = 0)
But. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 55 / 76
-
Nonlinear Model Predictive ControlThe basic idea : The
contraction property
A preliminary example
Consider the nonlinear system
ẋ1 = x2 ; ẋ2 = x1u
and the "candidate" Lyapunovfunction
V (x) =1
2
[x21 + x
22
]Compute the derivative of V
V̇ (x) = x1x2(1 + u)
For classical Lyapunov designV is not a good choice
(singular surface x1x2 = 0)
But. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 55 / 76
-
Nonlinear Model Predictive ControlThe basic idea : The
contraction property
A preliminary example
Consider the nonlinear system
ẋ1 = x2 ; ẋ2 = x1u
and the "candidate" Lyapunovfunction
V (x) =1
2
[x21 + x
22
]Compute the derivative of V
V̇ (x) = x1x2(1 + u)
For classical Lyapunov designV is not a good choice
(singular surface x1x2 = 0)
But. . .
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 55 / 76
-
Nonlinear Model Predictive ControlThe basic idea : The
contraction property
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
θ
minu(·)=u0∈[−umax,+umax ]
‖xu(T, x0(θ))‖
T=1T=2T=4
umax = 5
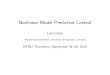
To summarize : A long term contraction propertyWhatever is the
initial state x0 ∈ B(0, 1), there exists constantcontrol u ∈ [−5,
+5] such that
V(xu(2, x0)
)‖ ≤ 0.9 V (x0) or
[V
(xu(4, x0)
)‖ ≤ 0.82 V (x0)
]
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 56 / 76
-
Nonlinear Model Predictive ControlThe basic idea : The
contraction property
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
θ
minu(·)=u0∈[−umax,+umax ]
‖xu(T, x0(θ))‖
T=1T=2T=4
umax = 5
To summarize : A long term contraction propertyWhatever is the
initial state x0 ∈ B(0, 1), there exists constantcontrol u ∈ [−5,
+5] such that
V(xu(2, x0)
)‖ ≤ 0.9 V (x0) or
[V
(xu(4, x0)
)‖ ≤ 0.82 V (x0)
]
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 56 / 76
-
Nonlinear Model Predictive ControlThe basic idea : The
contraction property
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
θ
minu(·)=u0∈[−umax,+umax ]
‖xu(T, x0(θ))‖
T=1T=2T=4
umax = 5
To summarize : A long term contraction propertyWhatever is the
initial state x0 ∈ B(0, 1), there exists constantcontrol u ∈ [−5,
+5] such that
V(xu(2, x0)
)‖ ≤ 0.9 V (x0) or
[V
(xu(4, x0)
)‖ ≤ 0.82 V (x0)
]M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 56 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
An intuitive bad formulation
A bad formulationDefine a receding horizon feedback based on the
following open-loopoptimization problem
minu(·),∆∈[0,T ]
∫ ∆0
L(xu(τ, x(t))
)dτ under V (xu(t + ∆, x(t))) ≤ γ V (x(t))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 57 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
An intuitive bad formulation
A bad formulationDefine a receding horizon feedback based on the
following open-loopoptimization problem
minu(·),∆∈[0,T ]
∫ ∆0
L(xu(τ, x(t))
)dτ under V (xu(t + ∆, x(t))) ≤ γ V (x(t))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 57 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
An intuitive bad formulation
A bad formulationDefine a receding horizon feedback based on the
following open-loopoptimization problem
minu(·),∆∈[0,T ]
∫ ∆0
L(xu(τ, x(t))
)dτ under V (xu(t + ∆, x(t))) ≤ γ V (x(t))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 57 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
An intuitive bad formulation
A bad formulationDefine a receding horizon feedback based on the
following open-loopoptimization problem
minu(·),∆∈[0,T ]
∫ ∆0
L(xu(τ, x(t))
)dτ under V (xu(t + ∆, x(t))) ≤ γ V (x(t))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 57 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
An intuitive bad formulation
A bad formulationDefine a receding horizon feedback based on the
following open-loopoptimization problem
minu(·),∆∈[0,T ]
∫ ∆0
L(xu(τ, x(t))
)dτ under V (xu(t + ∆, x(t))) ≤ γ V (x(t))
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 57 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
An intuitive bad formulation
A bad formulationDefine a receding horizon feedback based on the
following open-loopoptimization problem
minu(·),∆∈[0,T ]
∫ ∆0
L(xu(τ, x(t))
)dτ under V (xu(t + ∆, x(t))) ≤ γ V (x(t))
Updating systematically the contractive constraint
V (xu(∆, x(t))) ≤ γ V (x(t))
May cause instability in closed-loop
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 57 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
Classical contractive Receding horizon schemes
Kothare, S. L. de Oliveira and Morari, M. IEEE-TAC Vol 45 pp
1053-1071 (2000)
Non standard RH implementationLack of reactivityPotential
feasibility problems
In presence of disturbancesUnder truncated optimization
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 58 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
Classical contractive Receding horizon schemes
Kothare, S. L. de Oliveira and Morari, M. IEEE-TAC Vol 45 pp
1053-1071 (2000)
Either
Use the open-loop control
û(·, x(t))
on [t, t + ∆̂(x(t))]
Non standard RH implementationLack of reactivityPotential
feasibility problems
In presence of disturbancesUnder truncated optimization
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 58 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
Classical contractive Receding horizon schemes
Kothare, S. L. de Oliveira and Morari, M. IEEE-TAC Vol 45 pp
1053-1071 (2000)
Or
Memorize x(t) and use
V (xu(∆, x(t + kτs))) ≤ γ V (x(t))
in a RH scheme during the timeinterval [t, t + ∆̂(x(t))]
Non standard RH implementationLack of reactivityPotential
feasibility problems
In presence of disturbancesUnder truncated optimization
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 58 / 76
-
Nonlinear Model Predictive ControlUsing the contraction property
in feedback design
Classical contractive Receding horizon schemes
Kothare, S. L. de Oliveira and Morari, M. IEEE-TAC Vol 45 pp
1053-1071 (2000)
Or
Memorize x(t) and use
V (xu(∆, x(t + kτs))) ≤ γ V (x(t))
in a RH scheme during the timeinterval [t, t + ∆̂(x(t))]
Non standard RH implementationLack of reactivityPotential
feasibility problems
In presence of disturbancesUnder truncated optimization
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 58 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The class of systems
Consider nonlinear systems
ẋ = f(x, u) ; x ∈ Rn ; u ∈ Rm ; f continuous
satisfying the following assumption
Infinitely fast state excursions need infinite control
For all finite horizon T > 0,
lim‖x0‖→∞
[min
u∈W[0,T ]min
t∈[0,T ]‖F (t, x0,u)‖
]= ∞
for all compact subset W ⊂ Rm. [
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 59 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The class of systems
Consider nonlinear systems
ẋ = f(x, u) ; x ∈ Rn ; u ∈ Rm ; f continuous
satisfying the following assumption
Infinitely fast state excursions need infinite control
For all finite horizon T > 0,
lim‖x0‖→∞
[min
u∈W[0,T ]min
t∈[0,T ]‖F (t, x0,u)‖
]= ∞
for all compact subset W ⊂ Rm. [
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 59 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The open-loop control parametrization
X Choose a sampling period τsX Define a τs-piece-wise
constant control profile
Upwc(·, p) ; p ∈ P
X The parametrization iscalled "translatable" if for allp ∈ P,
there is p+ ∈ P s.t.
ui(p+) = ui+1(p)
∀i ∈ {1, . . . , N − 1}
Notation F (·, x, p), V (·, x, p)
p+ =
(e−τs 00 e−2τs
)p
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 60 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The open-loop control parametrization
X Choose a sampling period τsX Define a τs-piece-wise
constant control profile
Upwc(·, p) ; p ∈ P
X The parametrization iscalled "translatable" if for allp ∈ P,
there is p+ ∈ P s.t.
ui(p+) = ui+1(p)
∀i ∈ {1, . . . , N − 1}
Notation F (·, x, p), V (·, x, p)
p+ =
(e−τs 00 e−2τs
)p
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 60 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The open-loop control parametrization
X Choose a sampling period τsX Define a τs-piece-wise
constant control profile
Upwc(·, p) ; p ∈ P
X The parametrization iscalled "translatable" if for allp ∈ P,
there is p+ ∈ P s.t.
ui(p+) = ui+1(p)
∀i ∈ {1, . . . , N − 1}
Notation F (·, x, p), V (·, x, p)
p+ =
(e−τs 00 e−2τs
)p
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 60 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The contraction property
The strong contraction property1 ∃γ ∈]0, 1[ s.t. for all x,
there exists pc(x) ∈ P such that
minq∈{1,...,N}
V (qτs, x, pc(x)) ≤ γV (x)
2 pc(·) is bounded over bounded sets3 ∃ a continuous function ϕ
: Rn → R+ s.t. for all x :
‖V1→N(·, x, pc(x))‖∞ ≤ ϕ(x) · V (x)
where
‖V1→q(·, x, p)‖∞ = maxi∈{1,...,q}
V (iτs, x, p)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 61 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The contraction property
The strong contraction property1 ∃γ ∈]0, 1[ s.t. for all x,
there exists pc(x) ∈ P such that
minq∈{1,...,N}
V (qτs, x, pc(x)) ≤ γV (x)
2 pc(·) is bounded over bounded sets
3 ∃ a continuous function ϕ : Rn → R+ s.t. for all x :
‖V1→N(·, x, pc(x))‖∞ ≤ ϕ(x) · V (x)
where
‖V1→q(·, x, p)‖∞ = maxi∈{1,...,q}
V (iτs, x, p)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 61 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The contraction property
The strong contraction property1 ∃γ ∈]0, 1[ s.t. for all x,
there exists pc(x) ∈ P such that
minq∈{1,...,N}
V (qτs, x, pc(x)) ≤ γV (x)
2 pc(·) is bounded over bounded sets3 ∃ a continuous function ϕ
: Rn → R+ s.t. for all x :
‖V1→N(·, x, pc(x))‖∞ ≤ ϕ(x) · V (x)
where
‖V1→q(·, x, p)‖∞ = maxi∈{1,...,q}
V (iτs, x, p)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 61 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}
The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
The open-loop optimal control problem
min(q,p)∈{1,...,N}×PX
V (qτs, x, p) + αq
N·min
{ε2, ‖V1→q(·, x, p)‖∞
}The receding-horizon state feedback
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 62 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 63 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 63 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 63 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 63 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 63 / 76
-
Nonlinear Model Predictive ControlA new contractive scheme
The new contractive RH formulation
Basic ResultIf the following conditions hold
1 Continuity (system/parametrization)2 Infinitely fast
excursions need infinite controls3 The control parametrization is
translatable on
PX := P ∩B(0, sup
x∈B̄(0,ρ(X))‖pc(x)‖+ ε0
)⊆ P ⊆ Rnp
Then, ∃ sufficiently small ε > 0 and α > 0 such that the
RHfeedback is well defined and makes the origin x = 0
asymptoticallystable for the resulting CL dynamics with a region of
attractionthat contains X.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 64 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The simple inverted pendulum : A self contained RH control
F
r
θm, I
M
The system equations(mL2 + I mL cos θmL cos θ m + M
) (θ̈r̈
)=
(mLg sin θ − kθθ̇
F + mLθ̇2 sin θ − kxṙ
)A pre-compensator
F = −Kpre(
rṙ
)+ u
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 65 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The simple inverted pendulum : A self contained RH control
F
r
θm, I
M
The system equations
ẋ1 = x3 ; ẋ2 = x4(ẋ3ẋ4
)= [M(x)]−1
mLg sin(x1)− kθ · x3−Kpre1x2 −Kpre2x4 + mLx23 sin(x1)− kxx4 +
u
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 65 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The simple inverted pendulum : A self contained RH control
F
r
θm, I
M
Control parametrization
ui(p) = p · e−ti/tr ; ti =(i− 1)τs
N
where p ∈ P(x) := [pmin(x), pmax(x)] s.t
pmin(x) = −Fmax + Kpre1x2 + Kpre2x4pmax(x) = +Fmax + Kpre1x2 +
Kpre2x4
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 65 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The simple inverted pendulum : A self contained RH control
F
r
θm, I
M
Use the contractive RH formulation given by :
V (x) =1
2
[θ̇2 + βr2 + ṙ2
]+ [1− cos(θ)]2
min(q,p)∈{1,...,N}×P(x)
V (qτs, x, p) +α
N·min{ε, ‖V1→q(·, x, p)‖∞}
u(kτs + τ) = u1(p̂(x(kτs))) ∀τ ∈ [0, τs[
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 65 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The simple inverted pendulum : A self contained RH control
The parameters of the controllerparameter value
signification
τs 0.4 s sampling periodN 8 horizon lengthtr 0.2 Constant for
the control param.
α = ε 0.01 cost function parametersKpre
(2.5 10.0
)Pre-compensation gain
Fmax ∈ {1.0, 2.0} saturation level on Fβ ∈ 10 weighting
coefficient on r
Runs on a 1.3 GHz Pentium-III
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 66 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The simple inverted pendulum : A self contained RH control
0 10 20 30 40 50 60 70 800
50
100
150
200
250
300
350
400
0 10 20 30 40 50 60 70 80-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50 60 70 80-3
-2
-1
0
1
2
3
0 50 100 150 2000
20
40
60
80
100
θ (deg) r (m)
F (N)
Sampling periodsTime (s)
Computation time (ms)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 67 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 68 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
System equations
h1r̈ + h2θ̈1 cos θ1 + h3θ̈2 cos θ2 = h2θ̇21 sin θ1 + h3θ̇
22 sin θ2 + F
h2r̈ cos θ1 + h4θ̈1 + h5θ̈2 cos(θ1 − θ2) = h7 sin θ1 − h5θ̇22
sin(θ1 − θ2)h3r̈ cos θ2 + h5θ̈1 cos(θ1 − θ2) + h6θ̈2 = h5θ̇21
sin(θ1 − θ2) + h8 sin θ2
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 68 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Pre-compensation
F = −Kpre ·(
rṙ
)+ u
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 68 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Control parametrization
ui(p) = p1 · eλ1ti + p2e−λ2ti ; ti =(i− 1)τs
N
pmin(x) :=1
2
[−Fmax + Kpre
(rṙ
)]; pmax(x) :=
1
2
[+Fmax + Kpre
(rṙ
)]
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 68 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
The contractive RH controller
V (x) =h42
θ̇21 +h62
θ̇22 + h5θ̇1θ̇2 cos(θ1 − θ2) + h7[1− cos(θ1)
]+
+ h8[1− cos(θ2)
]+ h1
[r2 + ṙ2
]u(kτs + t) = KRH(x(kτs)) := u
1(p̂(x(kτs))) ; t ∈ [0, τs[
A local LQR controller
KL(x) = −L ·
xm1xm2x3...
x6
solving the discrete time Riccati equation
ATd SAd − S − (ATd SBd)(R + BTd SBTd )(BTd SAd) + Q = 0
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 69 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
The contractive RH controller
V (x) =h42
θ̇21 +h62
θ̇22 + h5θ̇1θ̇2 cos(θ1 − θ2) + h7[1− cos(θ1)
]+
+ h8[1− cos(θ2)
]+ h1
[r2 + ṙ2
]u(kτs + t) = KRH(x(kτs)) := u
1(p̂(x(kτs))) ; t ∈ [0, τs[
A local LQR controller
KL(x) = −L ·
xm1xm2x3...
x6
solving the discrete time Riccati equation
ATd SAd − S − (ATd SBd)(R + BTd SBTd )(BTd SAd) + Q = 0
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 69 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Hybrid controller for swing-up and stabilization of the double
inverted pendulum
To summarize, the hybrid controller is given by
u(kτs + τ) =
{KRH(x(kτs)) if ‖x(kτs)‖2S > ηKL(x(kτs)) otherwise
The parameters of the controllerparameter value
signification
τs 0.3 s sampling periodN 10 horizon lengthL (360, 29) (linear
controller gain)
(λ1, λ2) (100, 20) Control parametrizationη 1.0 switching
threshold
imax 20 Max number of function evaluation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 70 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Hybrid controller for swing-up and stabilization of the double
inverted pendulum
To summarize, the hybrid controller is given by
u(kτs + τ) =
{KRH(x(kτs)) if ‖x(kτs)‖2S > ηKL(x(kτs)) otherwise
The parameters of the controllerparameter value
signification
τs 0.3 s sampling periodN 10 horizon lengthL (360, 29) (linear
controller gain)
(λ1, λ2) (100, 20) Control parametrizationη 1.0 switching
threshold
imax 20 Max number of function evaluation
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 70 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
0 10 20 30 40-400
-200
0
200
400
600
800
0 10 20 30 40-500
0
500
1000
1500
0 10 20 30 40-0.8
-0.6
-0.4
-0.2
0
0.2
0 10 20 30 40-30
-20
-10
0
10
20
30
0 10 20 30 400
1
2
3
4
5
0 200 400 600 8000
50
100
150
200
250
300
θ1(deg) θ2(deg) r(m)
F (N) Optimal cost Ĵ(x) comp. times (ms)Time (s) Time (s) Time
(s)
Time (s) Time (s) Sampling period
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 71 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Double inverted pendulum
le film
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 72 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
The twin pendulum
Movie
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 73 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
The twin pendulum
0 10 20 30 40 50 600
1
2
3
4
5
6
7
temps (s)
θ1/(2π) et θ
2/(2π)
0 10 20 30 40 50 60-1
-0.5
0
0.5
1
temps (s)
position chariot r (m)
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
temps (s)
la fonction E
0 10 20 30 40 50 60-60
-40
-20
0
20
40
60
temps (s)
accélération du chariot d2r/dt
2 (m/s
2)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 73 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Nonlinear constrained NMPC for maximizing the production
inpolymerization processes.
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 74 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
N. Marchand and M. Alamir
Numerical stabilization of a rigid spacecraft with two
actuators
Journal of dynamic systems, measurements and control.Vol 125, No
3, pp 489-491, (2003)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir and F. Boyer
Fast generation of attractive trajectories for an under-actuated
sa-tellite : Application to feedback control design
Journal of optimization in Engineering. Vol 4, pp
215-230,(2003)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir
Nonlinear Receding Horizon sub-optimal guidance law for
minimuminterception time problem
Control Engineering Practice. Vol 9, Issue 1, pp 107-116,
(2001)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir and N. Marchand
Constrained Minimum Time Oriented Feedback Control For
theStabilization of Nonholonomic Systems in Chained Form
Journal of optimization Theory and Applications. Vol 118,No 2,
pp 229-244, (2003)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
A. Hably, N. Marchand and M. Alamir
Constrained Minimum-Time Oriented Stabilization of
ExtendedChained Form Systems
CDC-ECC. Spain, (2005).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. alamir and H. Khennouf
Discontinuous Receding Horizon Control Based Stabilizing
Feedbackfor Nonholonomic Systems in Power Form
CDC. New Orleans, (1995).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
A. Chemori and M. Alamir
Limit Cycle Generation for a Class of Nonlinear Systems
withjumps using a Low Dimensional Predictive Control
International Journal of Control. Vol 78, Issue 15, pp
1206-1217, (2005)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
A. Chemori and M. Alamir
Multi-step Limit Cycle Generation for Rabbit’s Walking Based ona
Nonlinear Low dimensional Predictive Control Scheme
International Journal of Mechatronics. To Appear (2005-6)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir, F. Ibrahim and J. P. Corriou
A Flexible Nonlinear Model Predictive Control Scheme for
Qua-lity/Performance Handling in Nonlinear SMB Chromatography
Journal of Process Control. To appear (2005)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
S. A. Attia, M. Alamir and C. Canudas de Wit
A Voltage Collapse Avoidance in Power Systems : A Receding
Ho-rizon Approach
International Journal on Intelligent automation and
SoftComputing, Special Issue on “Intelligent automation in power
sys-tems". To appear (2005)
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir and G. Bornard
On the stability of receding horizon control of nonlinear
discrete-time systems
Systems & Control Letters, Vol 23, pp 291-296, (1995).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir and N. marchand
Numerical Stabilization of Nonlinear Systems- Exact Theory
andApproximate Numerical Implementation
European Journal of Control, Vol 5, pp 87-97, (1999).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir and G. Bornard
Stability of truncated Infinite Constrained Receding
HorizonScheme : The General Nonlinear Case
Automatica, Vol 31, No 9, pp 1353-1356, (1995).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir and I. Balloul
Robust Constrained Control Algorithm for General Batch
Processes
International Journal of Control, Vol 72, No 14, pp
1271-1287,(1999).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir
A new Path Generation Based Receding Horizon Formulation
forConstrained Stabilization of Nonlinear Systems
Automatica, Vol 40, Issue 4, pp 647-652, (2004).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Further readings
M. Alamir
A Low Dimensional Contractive NMPC Scheme for Nonlinear Sys-tems
Stabilization : Theoretical Framework and Numerical Investi-gation
on Relatively Fast Systems.
Workshop on Assessment and Future Directions of
NMPC,Freudenstadt, Germany (2005).
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 75 / 76
-
Nonlinear Model Predictive ControlIllustrative examples
The double inverted pendulum : a hybrid control scheme
Download this presentation at
http ://www.lag.ensieg.inpg.fr/alamir/downloads.htm
M. Alamir (–) Nonlinear Model Predictive Control 8,15 Novembre
2005 76 / 76
The basic idea: The contraction propertyUsing the contraction
property in feedback designAn intuitive bad formulationClassical
contractive Receding horizon schemes
A new contractive schemeThe class of systemsThe open-loop
control parametrizationThe contraction propertyThe new contractive
RH formulation
Illustrative examplesThe simple inverted pendulum: A self
contained RH controlThe double inverted pendulum: a hybrid control
scheme