Embed Size (px)
Citation preview

S&than~, Vol. 20, Parts 2-4, April-August 1995, pp. 501-512. © Printed in India.
Nonlinear dynamics of offshore structures under sea wave and earthquake forces
K VENKATARAMANA and KENJI KAWANO
Department of Ocean Civil Engineering, Kagoshima University, Korimoto 1-21-40, Kagoshima City 890, Japan
Abstract. A study of dynamic response of offshore structures in random seas to inputs of earthquake ground motions is presented. Emphasis is placed on the evaluation of nonlinear hydrodynamic damping effects due to sea waves for the earthquake response. The structure is discretized using the finite element method. Sea waves are represented by Bretschneider's power spectrum and the Morison equation defines the wave forcing function. Tajimi-Kanai's power spectrum is used for the horizontal ground acceler- ation due to earthquakes. The governing equations of motion are obtained by the substructure method. Response analysis is carried out using the frequency-domain random-vibration approach.
It is found that the hydrodynamic damping forces are higher in random seas than in still water and sea waves generally reduce the seismic response of offshore structures. Studies on the first passage probabilities of response indicate that small sea waves enhance the reliability of offshore structures against earthquakes forces.
Keywords. Offshore structure, dynamic response, nonlinear hydrodynamic damping, first passage probability.
I. Introduction
The analysis and design of offshore structures is a complicated process and requires several assumptions and approximations. The structures have to resist hostile environ- ment and must stand on soils whose properties may be predicted only to an approxi- mate degree of accuracy. The loads acting on offshore structures in a typical ocean environment are many such as wind, waves, tides, currents, ice, earthquakes, tempera- ture loads, operational loads and so on. It is necessary to design an offshore structure such that it can respond to moderate environmental loads without damage and is capable of resisting severe environmental loads without seriously endangering the occupants. The various offshore structures presently in use are jacket-type fixed platforms, submersible or semisubmersible type floating platforms, steel or concrete gravity platforms, guyed towers, tension leg platforms, storage tanks, submersible pipe lines etc. The choice of a particular type of offshore structure depends on environmental
501

502 K Venkataramana and Kenji Kawano
and geotechnical conditions, functional objectives, safety requirements, and economi- cal and political considerations. Most of the offshore structures located in 30 m to 200m depth for oil and gas exploration purposes are jacket-type platforms. These platforms usually consist of space frame structures with piles driven through their legs.
Offshore structures may be analyzed using static or dynamic analysis methods. Static analysis methods are sufficient for structures which are rigid enough to neglect the dynamic forces associated with the motion under the time-dependent environmental loadings. On the other hand, structures which are flexible due to their particular form and which are to be used in deep sea must be checked for dynamic loads. Dynamic analysis is particularly important for waves of moderate heights as they make the greatest contribution to fatigue damage and reliability of offshore structures. The dynamic analysis methods may be based on either deterministic approach or stochastic approach. In the deterministic approach, time records of dynamic loads are used to calculate the time-dependent structural responses. In the stochastic approach, dynamic loads are treated as random processes and are represented by their spectral densities. The structural responses are also expressed accordingly. Thus, in the deterministic approach, all calculations are carried out mostly in the time domain whereas in the stochastic approach, they are carried out mostly in the frequency domain. Stochastic methods have become increasingly popular as they are better suited to study the long-term behaviour of offshore structures for a range of sea states.
For offshore structures assembled by slender members, evaluation of wave forces is one of the most important steps in any dynamic analysis. Rigorous mathematical solution has yet to be developed and the empirical force model proposed by Morison et al (1950) is widely used. Morison equation is an approximate solution to a complex problem. Numerous researchers have investigated the validity and applicability of this equation. It appears preferable to attempt to improve this equation rather than formulate a new one (Ika & Lai 1978). Morison equation was originally proposed for stationary cylindrical piles in waves. This equation is generalized for a non-stationary structure by considering the relative motion between the water particle and the structure. Since the motion of water particles in the ocean have statistical characteristi- cs, wave forces are also represented with stochastic processes namely'with a Gaussian and ergodic process. Using the power spectral density function for the variations of wave heights, power spectral density functions of wave forces can be easily determined through the spectral approach. Weigel et al (1957) observed that close proportionality exists between measured wave force and sea surface spectral densities. Borgman (1967) confirmed their results and proposed a spectral method of formulation of wave forces due to random wave action on vertical piles fixed at sea bottom. Dec & Narasimhan (1988) have proposed a generalized spectral method of formulation of wave forces due to multi-directional random waves on inclined members of offshore structures. Once the wave forces are expressed in the spectral form, dynamic analysis can be carried out using the principles of random vibration and the structural responses may be deter- mined. Foster (1970) developed a stochastic model for dynamic analysis of fixed-base offshore towers. One of the major problems involved in the stochastic analysis is the efficient modelling of nonlinear hydrodynamic drag and damping forces. The studies by Malhotra & Penzien (1970a, 1970b) provided an improved method for stochastic dynamic analysis of offshore structures. A linearization technique was proposed in these studies, to tackle the nonlinear hydrodynamic drag and damping forces, the essence of which is to alter damping coefficients in an optimal manner. The applicability of

Nonlinear dynamics of offshore structures 503
this linearization technique for random waves in comparison with other possible procedures have been discussed by Dao & Penzien (1982), and Gudmestad & Conner (1983). Eatock Taylor & Rajagopalan (1983) showed that this linearization technique is found to predict good responses only when the structural velocities are quite small compared to water particle velocities. Nonlinear dynamic analysis methods have been proposed by Laya et al (1984) and Jain & Durra (1987) to deal with larger structural velocities under regular or random waves.
For a typical offshore structure located in a seismically active region, earthquake loading should also be considered in the dynamic analysis. Earthquake motions are generated through numerous random phenomena and are essentially random .in nature. Several methods are available for the dynamic analysis of structures on land subjected to earthquake ground motions. However, these methods cannot be directly applied to offshore structures due to the presence of surrounding water and sea waves. Dynamic analysis is complicated due to the fact that hydrodynamic forces are coupled to the dynamic response. Penzien et al (1972) have presented a stochastic method of analysis,of fixed-base offshore towers due to random sea waves and strong motion earthquakes. They observed that the hydrodynamic drag effects become important with increasing tower period or water depth. Bea (1979) developed the design criteria for offshore platforms subjected to these loads and compared his results with onshore building structures. Anagnostopoulos (1982) carried out studies on the evaluation of modal solutions of offshore platforms. All these investigations treat the effects of wave and earthquake forces independently assuming that they do not act simultaneously. But in normal seas subjected to earthquake ground motions, there may be wind generated waves of at least 1 m to 3 m heights. Therefore, it is important to investigate whether the earthquake response of offshore structures is significantly affected by these sea waves.
This paper discusses the dynamic response of offshore structures in random seas subjected to earthquake ground motions. Emphasis is placed on the evaluation of nonlinear hydrodynamic damping effects of sea waves for the seismic response. The input ground acceleration is horizontal and is expressed by Tajimi-Kanai's power spectrum for the stationary filtered white noise. The dynamic equations of motion are derived using the substructure method and the response analysis is carried out using the frequency-domain random-vibration approach. Numerical results are presented for various combinations of typical sea states and earthquake ground motions. The response quantities are compared using the principles of first passage probabilities across specific barriers.
2. Dynamic response analysis method
Figures 1 and 2 show the elevations of offshore structure models with pile-soil foundation systems. The wave force is expressed using the Morison equation and the nonlinear relative-velocity squared drag term is replaced by an equivalent linearized drag term assuming that the proability density function for the relative particle velocity is Gaussian. In the present problem, relative velocity is the difference between the water particle velocity due to wave motion and the structural velocity due to wave motion as well as due to earthquake motion. The linearized Morison equation has the form:
{F . } = ECM] - ECA] {a . } + r C o l - }, (1)

504 K Venkataramana and Kenji Kawano
t 6 0 m I
~v_~e$ 1
2
3
4
5
6
z,
. . . .
V
tom
Om
'lOm
, . s . o , % . ,
r Figure 1. Analytical model of earthquakes offshore structure: Model A,
where [c ,~] = [ ~pc . v ~] , [ c , , ] = [ ~ p ( c . - 1) v ~],
[Col = [ r"PCd(A/2)(8/n)'/za," ~], r = v~ - a s,
in which p is the mass density of water, V is the volume of the displaced water, A is the area projected in the direction of flow, C . is the inertia coefficient, C a is thedrag coefficient, {u. } is the displacement vector of the structure, { vo } is the water particle velocity vector
30m I
/ \
/ \ / \ / \ / \ / \ / \
eorthquakes
iota ~w
lore
Figure 2. Analytical model of offshore structure: Model B.

Nonlinear dynamics of offshore structures 505
and {va } is the water particle acceleration vector at the undeflected structure coordi- nate location s, tr, is the rms value of the relative particle velocity which is obtained by an iterative procedure.
Dynamic response characteristics of the structure depends on the vibrational behaviour of the structure as well as on the dynamic characteristics of the foundation- soil system. In the present study, the equation of motion is obtained by the substructure method in which the structure-pile-soil system is hypothetically divided into two substructures: the structure and the pile-soil foundation. The equation of motion for the total system is obtained by combining equations of motion for the structure subsystem and for the pile-soil subsystem, and by satisfying the compatibility condi- tions of displacements and the equilibrium conditions of forces at base nodal points. The nodal points except at the base have three degrees of freedom: horizontal displacement, vertical displacement, and rotational displacement in plane. The soil- structure interaction is idealized as a system of spring-dashpot element. The dynamic stiffness coefficient of the pile-soil foundation is obtained by the impedance method. The total displacement of the structure is treated as the sum of the dynamic displace- ment of the structure for the rigidly supported base condition, and the quasi-static displacement due to the interactions with the foundation. The dynamic displacement of the structure is treated as a linear combination of the first few vibration modes for the rigidly supported base condition which have significant effects on the response. The quasi-static displacement is expressed as the superposition of a few generalized displacements.
The equation of motion for the structure-pile-soil system is finally expressed as (Venkataramana et al 1989):
o] ] o [g ] = L[p ] (2)
where
EPa]- l =n[(~IT[Maa][L][a] l [Pb]J~ L[G]T[[L]"[I~I.~][ L] + [Mbb]][G]J'
= {q},
in which the subscript a denotes the unrestrained nodal points above the base, the subscript b denotes the nodal points at the base, the subscript p denotes the pile-soil foundation, the subscripts w and e denote the wave and earthquake respectively, q is the modal displacement vector for dynamic displacements, • is the undamped eigenvector (mode shape) for the structure with rigidly supported base condition, cofi is the corresponding natural frequency for thejth vibration mode of the structure with rigidly supported base condition, flf~ is the corresponding damping ratio which includes both the structural damping and the hydrodynamic damping and fig is the seismic ground acceleration.
Equation (2) contains a nonproportional damping matrix and hence complex eigenvalue analysis must be carried out for exact response analysis. However, when the

506 K Venkataramana and Kenji Kawano
lower natural frequencies are well separated, the modal coupling effects due to off-diagonal terms are negligible. Therefore a simplifying approximation is made in the present study by considering only the diagonal terms of the damping matrix.
The response quantities in (2) can be expressed as a linear combination of generalized coordinates {y} using a new eigenvector [~ ] for the structure-pile-soil system. Therefore, (2) can be transformed as
LcP lJ.II ol; -L j IEP llflJ' o) where
{q} = [ V] { y } , {..}J
in which co s is the natural frequency forjth vibration mode of the structure-pile-soil system, flj is the corresponding damping ratio which includes the structural damping, the radiation damping through the pile-soil foundation and the hydrodynamic damping.
Responses may be obtained from (3) by substituting for water particle velocities, water particle accelerations and ground accelerations. But, these variables take ran- dom values and require the application of random vibration approach. Assuming that the sea waves have stochastic properties of the zero-mean Gaussian process, they are represented by the one dimensional power spectrum of the Bretschneider type which is a function of statistically known mean wave height/~ and mean wave period T.. The associated wave kinematics are computed by small amplitude wave theory. On the .other hand, the seismic characteristics of the ground motion for stationary conditions are represented by Tajimi-Kanai's expression for power spectrum of ground acceleration.
Using the assumptions of stationary process and independent random process of sea wave and input ground acceleration, the power spectrum of generalized modal forces can be obtained by the summation of each power spectrum. The variance of the modal responses is then expressed as
Lt(.,)]l(.,} in which [H(co)] is the complex frequency response function and [//(to)*] is its conjugate. Using the results of(4), the relative response of superstructure is determined by transforming the modal response due to the modal matrix of the superstructure.
The duration times of earthquake ground motions and sea waves are very different. Therefore the responses due to these forces and their inter-relationships may be better interpreted using the principles of first passage probabilities. The reliability L(2) of the structure corresponds to the probability of response x(t) not exceeding the value of a critical barrier 2 and is given as (Vanmarcke 1975):
L(2) = exp I ( ) - l ( ~ 2 / % ) l / 2 t ° e x p - ~
y2 x{1-exp(-(=/2)t/2qxy)}/{1-exp(--~)}], (5)

Nonlinear dynamics of offshore structures 507
where
(i = 0, 1,2)
in which to is the duration of the input excitation, ~, is the ratio of the critical barrier and the rms response, Gx(og) is the power spectral density function of the response and q~ is the bandwidth parameter which represents the degree of dispersion of the spectral density function about its central frequency.
3. Numerical results and discussions
The dynamic response analysis is carried out for model A and model B shown in figures 1 and 2 respectively. Model A has a lower fundamental frequency compared to that of model B. The depth of water is 110m from mean sea level. The main members have an outer diameter of 2"8 m and a thickness of 27 mm. Each leg of the tower rests on a pile-soil foundation. The structural members as well as the piles in the foundation are made of steel. Table 1 shows the details of pile-soil foundation. The shear wave velocity V, in the soil is assumed to be 100 m/sec. The natural frequencies and vibrational mode shapes are computed by eigenvalue analysis. The values of natural frequencies are shown in table 2 for up to the third mode of vibration. The structural damping for the first vibration mode of the structure subsystem is assumed to be 2%. When the soil-structure interaction is considered, by incorporating the pile-soil foundation in the offshore structure model, the structural and radiation damping is found to be 1"35% for model A and 1.95% for model B.
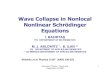
Figure 3 shows the example of Bretschneider's wave energy spectrum for mean wave height of 3 m, and mean wave periods of 5 s and 7 s. Higher frequency components have smaller energy while lower frequency components have greater energy. Figure 4 is a plot of Tajimi-Kanai's ground acceleration spectrum for rms ground accelerations of 30gal (moderate earthquakes) and 100 gal (severe earthquakes). Marine soil is usually soft and therefore a characteristic ground frequency of 10 rad/s and damping ratio of 0.6 are assumed. It is seen that sea wave motion is a narrow band process whereas earthquake ground motion is relatively a broad band process. The dominant peak frequencies of these two types of loadings are also well separated.
The Morison equation is used to compute the hydrodynamic forces due to the surrounding water and sea waves. The values of the inertia coefficient Cm and the drag
m2. s 2O
E
Ul
o /
i i
H=3rn ~?--?S
1 2 rad Is frequency
Figure 3. trum.
Wave energy spec-
508 K Venkataramana and Kenji Kawano
gal 2 s 4O E
.b u
C
• ~ 20
u
30 gal . . . . k
0 10 20 radls Figure 4. Ground acceleration frequency spectrum.
coefficient Cd are assumed to be 2"0 and 1"0 respectively. The linearized drag term is computed by a cyclic procedure by altering the damping coefficients in an optimal manner. In the present study, reasonable convergence was attained in about three cycles of iteration.
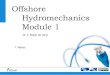
Figures 5 and 6 show the rms response displacement at node 1 (top node) of models A and B respectively, and the response is plotted against rms ground acceleration. The response due to earthquake input generally increases with the increase in ground. acceleration. When sea waves are neglected, hydrodynamic damping has a small effect on the response and the response increases linearly with the increment in the input ground acceleration. For rms acceleration of earthquake motions over about 30 gal, the displacement responses due to earthquake forces in random seas are lower than those due to earthquake forces in still water. The differences of these responses have an increasing tendency for an increase of the mean wave height and the mean wave period. However, the probability of the simultaneous occurrence of the severe earthquake motions and very strong sea waves is very small. In moderate wave conditions, which correspond to mean wave heights under about 3 m, the probability that the offshore
m
0.3
0-2
O E
u~
o.1
t
- Hm.TS / I a - - 3 ? / b - - 5 8 / ¢ - - 7 10 / / Q /
i
5() 100 gal rms ground acceleration
Fig, ure 5. RMS displacement at node 1 for model A ( - - - earth- quakes in still water; - - earthquakes in a random sea).

Nonlinear dynamics of offshore structures 509
m 0.10
E 0.05
~3
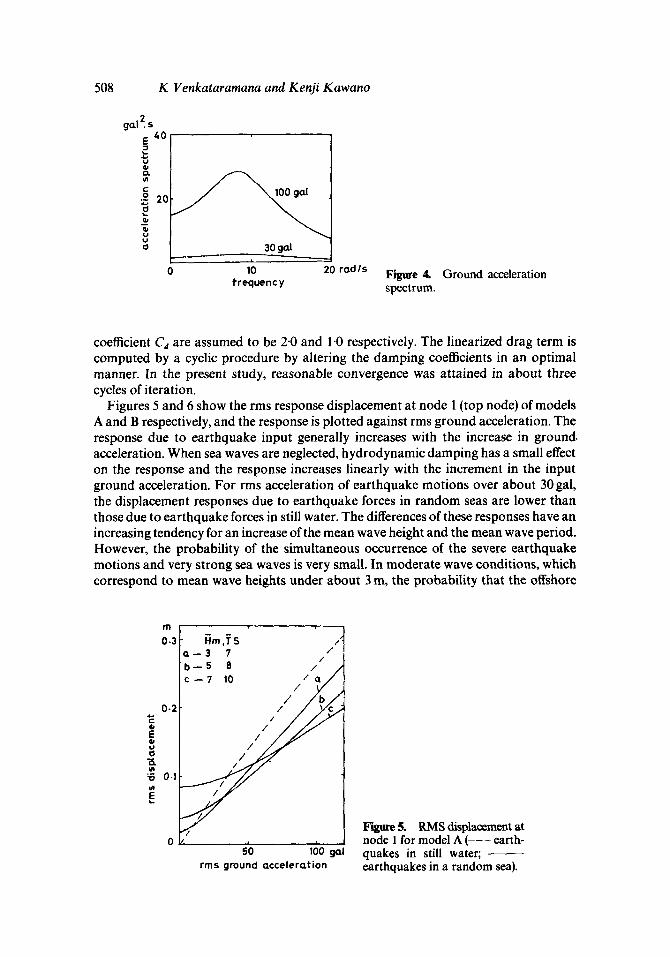
H m . ? S a - 7 10 b - S 8
/ /
b /
,
SO 100 gal rms ground accelerat ion
Figure 6. RMS displacement at node 1 for model B ( - - - earth- quakes in still water; - - earthquakes in a random sea).
structure is hit by severe ear thquake motions is considerable. Also, when the offshore structure is subjected to ear thquake motions under about 20 gal, the responses due to simultaneous loadings of ear thquake motions and sea wave forces are generally larger than those due to ear thquake motions only.
The response characteristics are very sensitive to the intensity of ear thquake motions and sea wave forces. Further, in the absence of sea waves, nonlinear hydrodynamic damping forces which are proport ional to the square of structural velocities are relatively small. On the other hand, if sea waves are included, the hydrodynamic damping forces are now proport ional to the square of the relative velocities between the waves and the structure. Since the wave velocities are very much higher than the structure. Since the wave velocities are very much higher than the structural velocities, nonlinear hydrodynamic damping forces become larger than those without waves. Examples of hydrodynamic damping ratios for the first vibration mode of the struc- ture-pi le-soi l system are shown in table 3 for mean wave height of 3 m, mean wave period of 7 s and rms ground acceleration of 30 gal.
Figures 7 to 10 show the rms response displacement at node 1 for sea waves of mean heights ranging from 3 m to 7 m in situations of specified ear thquake forces. When rms ground acceleration is 30 gal, responses due to simultaneous loadings of ear thquake motion and small sea waves give generally smaller evaluations than those due to ear thquake motions in still water. But, when the ear thquake motions are severe, the
m
O. 3 I 100 g a l
E ~ 0.2 ~ . s m
.~ \ ~ 7m
0.1 s 1~)
mean wave per iod 15 S
Figure 7. RMS displacement at node 1 for model A ( - - earth- quakes in still water; - - earthquakes in a random sea).

510 K Venkataramana and K enji K awano
m
0.2 30 gal
.~0 .1 n
Figure 8. RMS displacement at 0 , node I for model B (--- earth-
10 15 s quakes in still water; - - mean wave per iod earthquakes in a random sea).
responses duc to wave and earthquake loadings are very much smaller than those due to earthquake forces in still water, even for large wave conditions. Therefore the responses are mainly controlled by the earthquake forces, the proximity of the excitation frequency to the fundamental frequency of the offshore structure system and the nonlinear hydrodynamic damping due to sea waves.
The reliabilities on the first passage of responses, which arc functions of the duration times of sea waves and earthquake ground motions, arc calculated using Vanmarcke's expression (5), and are plotted in figure I 1 for model A and in figure 12 for model B. The numbers in the figures indicate the rms ground accelerations. As a rough estimate, 3.5a x, where ~rx is the response displacement at node I and 3-5 is the peak factor, is used as the mcan extreme response or barrier level ,L The duration time to is expressed in multiples of the first natural period To. The rcliabilities of the structure for earthquake forces are generally higher when sea waves are included in the analysis since the hydrodynamic forces reduce the response values.
m m
0.10 0 , I 0
E qb
0.0s e~
in
' 100 gal ] !
,-:? 1 5 10 15 s
mean wave period
Figure 9. RMS displacement at node 1 for model A ( - - - earthquakes in still water; - - earthquakes in a random sea).
¢..
E ¢.p 0.0s
n
30 gal
1 3 m
I
5 10 15 s mean w a v e per iod
• Figure 10. RMS displacement at node 1 for model B ( - - - earthquakes in still water, - - earthquakes in a random sea).

Nonlinear dynamics of offshore structures 511
k
1.0
._J
~ 0 . 5 :
0 10 0
\ "-, ,0 3° • \ \ \ \ , \ 1 o o \ \ \
\ ~ ~ . ~ . . ~ . . . _ \ ,,,.. ~_ ~ . ' - .
101 10 2 10 3 ('To) durat ion ,s
Figure 11. Reliabilities on level crossing of response displace- ment: Model A ( - - - earth- quakes in still water; - - earthquakes in a random sea).
The two loads considered in the present research are the wave and ear thquake loads. Sea wave is a narrow-band steady-state process of several hours durat ion and earthquake is a broad-band transient process occurring for a few minutes. Compar ing only the rms response of structure due to these loads is not sufficient for understanding the mechanism of hydrodynamic damping effects of sea waves on the seismic response. Therefore a first passage probabili ty analysis, which takes into account the differences in their duration times, is carried out in this paper. Of course, one may question the validity of such an approach. But this method will serve as a tool for understanding the basic concepts and for realizing the extent of damping effects of sea waves on the ear thquake response evaluation.
4. Conclusions
The dynamic response analysis of offshore structures in random seas have been carried out for the input of ear thquake loadings. Two types of models are considered for numerical study: one is a relatively flexible structure and the other is a relatively rigid structure. The results of analysis indicate that responses due to ear thquake motions vary with the intensity of the input ground acceleration. In the absence of sea waves, the effects of nonlinear hydrodynamic damping are small. When sea waves are considered, hydrodynamic damping forces are proport ional to the square of the relative velocities between the waves and the structure. Since the wave velocities are very much higher
k 1.0
. J
"~ 0.5 C3
I
oo
" , \ " ,00 \ , , \
i ,
101 10 2 10 3 (" To) durat ion, s
Figure 12. Reliabilities on level crossing of response displace- ment: Model B ( - - - earth- quakes in still water; - - earthquakes in a random sea).

512 K Venkataramana and Kenji Kawano
than the structural velocities, these damping forces become larger than those without waves.
In the present paper, the results are mainly based on frequency-domain analysis. As a next step, t ime-domain analysis is being carried out. The findings of that study will be published later.
References
Anagnostopoulos S A 1982 Wave and earthquake response of offshore structures: Evaluation of modal solutions. J. Struct. Div., Am. Soc. Cir. Eng. 108(ST10): 2175-2191
Bea R G 1979 Earthquake and wave design criteria for offshore platforms. J. Struct. Div,, Am. Soc. Civ. Eng. 105(ST2): 401-419
Bea R G, Lai N W 1978 Hydrodynamic loadings on offshore structures. Offshore Technology Conference, Houston, Paper OTC 3064, 155-188
Borgman L E 1967 Spectral analysis of ocean wave forces on piling. J. Waterways Harbors Div., Am. Sac. Cir. Eng. 93(WW2): 129-156
Dao B V, Penzien J 1982 Comparison of treatments of nonlinear drag forces acting on fixed offshore platforms. Appl. Ocean Res. 4(2): 66-72
Deo M K, Narasimhan S 1988 Generalized estimation of wave force spectra, J. Waterway, Port, Coastal Ocean Eng. 114:175-190
Eatock T R, Rajagopalan A 1983 Load spectra for slender offshore structures in waves and currents, Earthquake Eng. Struct. Dyn. 11:831-842
Foster Jr E T 1970 Model for nonlinear dynamics of offshore towers, J. Eng. Mech. Div., Am. Soc, Cir. Eng. 96(EM1): 41-67
Gudmestad O T, Connor J J 1983 Linearization methods and the influence of current on the nonlinear hydrodynamic drag force. Appl. Ocean Res. 5(4): 184-194
Jain A K, Dutta T K 1987 Nonlinear dynamic analysis of offshore towers in frequency domain, d. Eng. Mech. Div., Am. Soc. Civ. Eng. 113:610-625
Laya E J, Connor J J, Shyamsunder S 1984 Hydrodynamic forces on flexible offshore structures, J. Eng. Mech. Div., Am. Soc. Cir. Eng. 110:433-448
Malhotra A K, Penzien J 1970a Nondeterministic analysis of offshore structures, J. Eng. Mech. Div., Am. Soc. Civ. Eng. 96(EM6): 985-1003
Malhotra A K, Penzien J 1970b Response of offshore structures to random wave forces, J. Struct. Div., Am. Soc. Cir. Eng. 96(ST10): 2155-2173
Morison J R, O'Brien M P, Johnson J W, Schaaf S A 1950 The force exerted by surface waves on piles. Pet. Trans., AIME 189:149-154
Penzien J, Kaul M K, Berge B 1972 Stochastic response of offshore towers to random sea waves and strong motion earthquakes. Comput. Struct. 2:733-756
Vanmarcke E H 1975 On the distribution of the first-passage time for normal stationary random processes. J. Appl. Mech. 42:215-220
Venkataramana K, Yamada Y, Yoshihara S, Iemura H, Kawano K 1989 Stochastic response of offshore structures to sea wave and earthquake excitations with fluid-structure-soil interac- tion. Research Report, Dept. of Civil Eng., Kyoto Univ., 89-ST-01, 97-141
Wiegel R L, Beebe K E, Moon J 1957 Ocean wave forces on circular cylindrical piles, J. Hydraulics Div., Am. Soc. Cir. Eng. 83(HY2): Proc. Paper 1199