Embed Size (px)
Citation preview
the calculations. The approach adopted to construct a mathematical model allowed a symmetric, block form of the solution of the given problem to be obtained, on the basis of which ration- al computational algorithms for computer realization of the solution may be written.
L ITERATUP~E CITED
i. M. Bismyu, "Dynamics of the flight of research rockets with a set of heights," in: Mechanics. Problems of Stabilizing Component Satellites (New Developments in Non-Soviet Science) [Russian translation], Mir, Moscow (1975), p. 123.
3. R.F. Ganiev and V. O. Kononenko, Oscillation of Solids [in Russian]~ Nauka, Moscow (1976).
4. A. Yu. Ishlinskii, Orientation, Gyroscopes, and Inertial Navigation [in Russian], Nauka, Moscow (1976).
2. G.S. Byushgen and R. V. Studnev, Dynamics of Spatial Motion of Aircraft [in Russian], Mashinostroenie, Moscow (1967).
5. B.A. Kil'chevskii, Course in Theoretical Mechanics [in Russian], Nauka, Moscow (1977). 6. A.I. Lur'e, Analytical Mechanics [in Russian], Fizmatgiz, Moscow (1961). 7. V.I. Popov, Systems of Orientation and Stabilization of Spacecraft [in Russian],
Mashinostroenie, Moscow (1977) . 8. V.K. Svyatodukh, Dynamics of Spatial Motion of Controlled Rockets [in Russian], Mashino-
stroenie, Moscow (1969). 9. V.A. Yaroshevskii, Motion of Uncontrolled Body in the Atmosphere [in Russian], Mashino-
stroenie, Moscow (1978).
NONLINEAR COMPARISON SYSTEMS IN STABILITY PROBLEMS OF LARGE-SCALE SYSTEMS
A. A. Martynyuk and N. V. Nikitina UDC 531.36
Section i. One of the central problems of the comparison method in studying d3~amical properties of large-scale systems [5, I0, Ii] is the problem of constructing and studying the stability of comparison systems [6]. Algorithms based on estimates by Krasovskii [4], characteristic of quadratic forms, have been developed.
Solving the stability problem of autonomous comparison systems discussed in [6] makes it possible to make progress in constructing comparison systems, i.e., systems described by differential equations with a right-hand side satisfying the Wazewski condition [12]~
In the present paper we discuss a method of constructing nonlinear comparison systems for autonomous large-scale systems describing the perturbed motion of a material object, and estimates are obtained of the stability and attraction regions. The method is illustrated on the problem of motion of self-orienting elastic chassis wheel.
It is assumed that the perturbed motion of some mechanical system is described by the equations
dx = X (x), ( 1 . 1 ) dr'
where x ~ R n is the vector state of the system, and for each pair (to, x0),~int(Jx~), J=[0$ oo), f~Rna solution of the Cauchy problem, related to system (i.i), exists, is unique, and passes through the point xo at t = to. The system (I.i) is represented in the form of several coupled subsystems
dxi =Xi(x~,. . x~ ( i=1 ,2 , m), (1 2) clt . . . . . . .
Institute of Mechanics, Academy of Sciences of the Ukrainian SSR, Kiev. Translated from Prikladnaya Mekhanika, Vol. 17, No. 12, pp. 97-102, December, 1981. Original article submitted November 12, 1980.
0038-5298/81/1712- 1123507.50 �9 1982 Plenum Publishing Corporation 1123
where xiER ni is a vector of dimensionality n~[~ni=n]. In this case x-----(x! ..... Xm)* and
X=(XI ..... Xm)*, Xi:JXRn->R nt, and (,) is the transposition sign. Further, along with
the system (1.2) we consider the Liapunov vector function V = (VI, ..., Vm)* with components V i = Vi(xi) (i = I, 2, ..., m) and its total derivative in view of system (1.2)
? = g(x~ . . . . . x~). ( 1 . 3 )
For the given equation (1.3) we mention the system
dy~ dt =Y~(Y~ . . . . . Ym, [~) ( i = I, 2 . . . . . m), (1.4)
in whose construction the usual inequality of the comparison principle is satisfied
g(xt . . . . . xra) ~ Y (V (x), I~), (1.5)
where B is a vector characterizing the construction of the right-hand side of system (1.4)
under the following assumptions:
i) the right-hand side satisfies the Wazeski condition [7, 12], i.e., condition of mono-
tonic increase of the function Yi(Y~, .--, Ym, Bi) in off-diagonal elements;
2) the right.-hand side of system (1.4) is continuous, and the solution of the Cauchy
problem for any yo ~ R m is locally unique;
3) there exists a neighborhood P of the point y = y,, such that for all y~P,y=/=y,, Y(v, fO=/=0 and Y(V., f~)=0
The following statement was proved in [6].
THEOREM i.i. For asymptotic stability in the cone y ~_. y, of the solution y = y, of system (1.4) a necessary and sufficient condition is the simultaneous system of inequalities
Y(y, f~)<0, y > y , . (1.6)
We use the ideas of [2]. Consider the functional
I = Y (V ( x), ~) - - "V (x). (1.7)
We search the curve determining Eq. (1.4), for which the value of the functional (1.7) is minimum. In this sense the problem of constructing the comparison system is a variational
problem.
If the comparison system is constructed by any method and inequality (1.5) is satisfied, an "improvement" of the comparison system (1.3) can be obtained by minimizing the discrepancy (1.7) with respect to a parameter, i.e., the refined right-hand sides of system (1.4) must
satisfy the condition
m i n 1 ( Y (V (x), f~) - - V (x)}. (1. s) 15
Consider the system
d'~i _ Aix, q-~Xi (xi . . . . . xm) (i = 1, 2 . . . . . m). dt
By means of linear nonsingular transformations x i = Biz i (i = I, 2, ..., m) we reduce system
(1.8) to diagonal form
dzt ---- BF'AiBizi -k BFl~(i (Btzt, B~,z~). dt . . . .
Each pair of complex conjugate roots will correspond to the variables z k, z k. We denote [9]
1124
z h = pt, e m'~, zk = phe -m'~. ( 1 . 9 )
Differentiating Eq. (1.9), we find
dPt, d--7-- = o:~t)h + ( F~,e -ink + -f hemk),
where ~k = Re~k, and ~k are the roots of det(A k -- ~E k) = 0 (k = i, 2, ..., m).
Consider the positive-definite Lyapunov vector-function
V (p~ . . . . . P,.) = P,J . . . . . P,,a . (1.10)
where n i' < ni (i = i, 2, ..., m) is the number of different roots in each subsystem, and
Here W(V~, . . . , V m, ~ , . . . , 0 m) i s V w i t h t h e e s t i m a t e d sum e
n k
N'akjpkj<~aoVh, a ~ = m a x { a h j ) ( k = l , 2, �9 m);
Oi ~ T n f i s a v e c t o r o f d i m e n s • n i ' , b e i n g t h e a r g u m e n t o f a p e r i o d i c f u n c t i o n , and T n• i s a t o r u s f a c t o r .
The c o m p a r i s o n s y s t e m i s c o n s t r u c t e d i n t h e form
y = ~ , o' , . . . . o~ , ~), ( 1 . 1 1 )
where 0~*o are fixed values of the vector 0j, guaranteeing the satisfaction of condition (1.8), and y~r is the vector of physical parameters of the system.
Let the right-hand side of (i.ii) satisfy the Wazewski condition, and let the solution of the Cauchy problem for each go~R m be locally unique.
The attraction region of the equilibrium positions is the set P={Y0: y(t, yo)---~y,,, t--+oo} . Depending on the physical parameters, the stability region is determined by the set
A={~:~(y , o', . . . . o,'~, ~)<o, y>y.).
The attraction region and the stability region in the space determined by ~R r is calculated on the basis of.system (I.ii) considered for certain fixed values 0j, on which the periods of the trigonometric functions are constructed and in which 0j appear as arguments, i.e.,
P = A P , , a = A a , ( i =1 . . . . . k < ~ ) , t i
where Pi, Ai are the regions determined for fixed 0j values.
THEOREM 1.2. Let the large-scale system (i.i) be such that the characteristic equations of isolated subsystems have complex-conjugate simple roots, and let the system (i.Ii) be the comparison system for the original system (i.i). When the inequalities
- - * �9
W(y ,O . . . . . Om,'~)<O, y > y .
are satisfied, the system (i.i) has either as asymptotically stable unperturbed motion, or a set D to which the solution is attracted, i.e., p(x(t), D) § 0 for t + +~. Here ~,(x, D) is the distance from the point x to the set D.
Proof. The dynamic properties of system (i.ii) "majorize" the dynamic properties of system (I.i). Based on Theorem i.i, the solution of system (i.ii) is asymptoLically stable, while if asymptotic stability of the vanishing solution of (i. II) is sufficient for asymptotic
1125
z,t z
Fig. 1
h~. kgm. see oo\ , . f 3o00 4 I 2000 ~
I
~000 ~2 [ : "
20 30 q0 N [~0 70 B0 N Km/sec
v z. vr, V3, m
I
o.ol - ~oot
30 40 50 g. m / s e e
Fig. 2 Fig. 3
stability of the vanishing solution of (l.1), then asymptotic stability of the nonvanishing solution of the oomparison system is sufficient for the existence of an attraction set D in system (i.i).
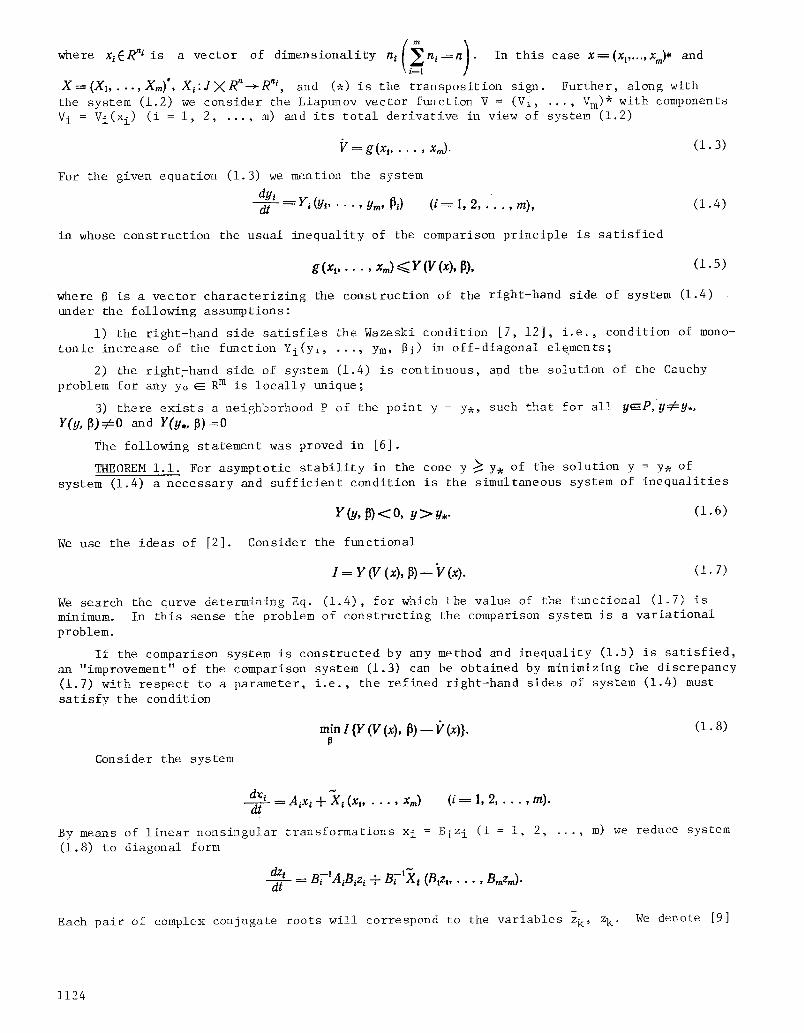
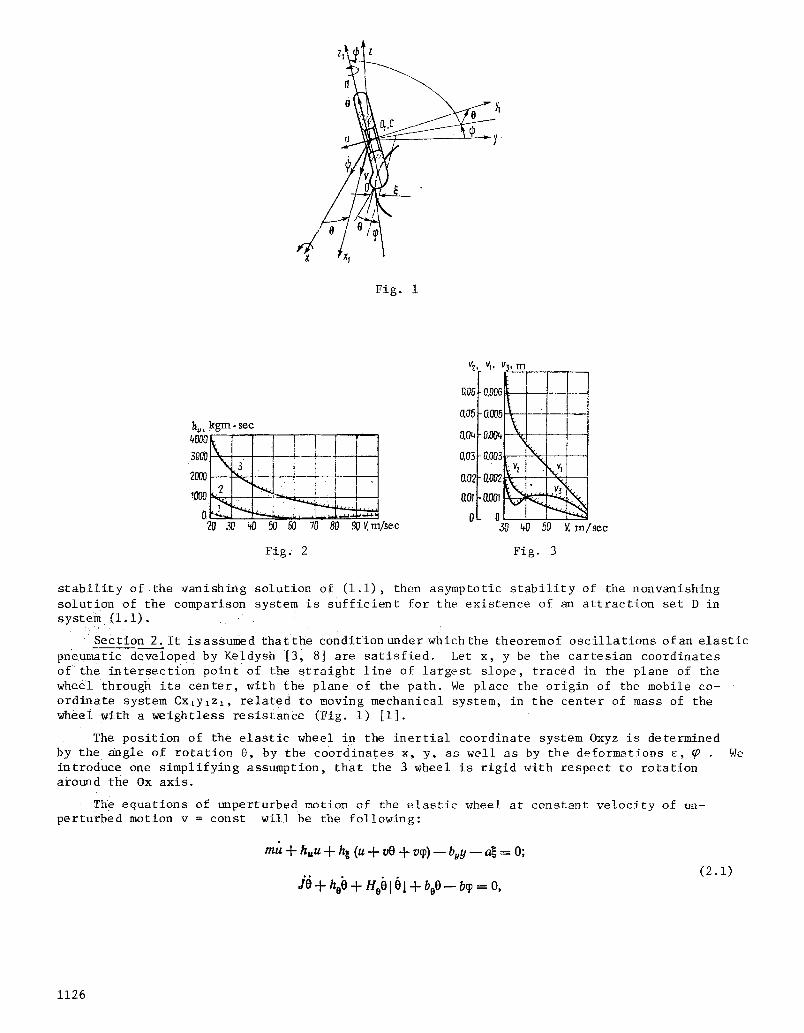
Section 2. It is assumed that the condition under which the theoremof oscillations of an elastic png umatic developed by Keldysh [3, 8] are satisfied. Let x, y be the cartesian coordinates of the intersection point of the straight line of largest slope, traced in the plane of the wheel through its center, with the plane of the path. We place the origin of the mobile co- ordinate system Cxtyxzl, related to moving mechanical system, in the center of mass of the wheel with a weightless resistance (Fig. i) [I].
The position of the elastic wheel in the inertial coordinate system Oxyz is determined by the angle of rotation O, by the coordinates x, y, as well as by the deformations E, ~ . We introduce one simplifying assumption, that the 3 wheel is rigid with respect to rotation around the Ox axis.
The equations of unperturbed motion of the elastic wheel at constant velocity of un- perturbed motion v = const will be the following:
mu + h.u + h~ (u + vO + vq~) - - butt - - a~ = O;
j6 + hob + no~ 161 + boo - bq~ = o, (2.1)
I126

where u is the velocity of transverse wheel displacement, equal to
u= --y (2.2)
a, b, h~ are the parameters appearing in the expression for the force due to the pneumatic deformation, by, b 0 are the coefficients of the rigid support relative to bending and twist- ing, H o is the characteristic of the nonlinear damper, h~, h u are the characteristics of linear friction, and M and J are the mass and moment of inertia with respect to the Cx axis of the wheel.
Equations (2.1) of nonholonomic coupling
and Eq. (2.2) are a closed system for determining y(t),O(t),$(t),~(t).
In the variables y~=0, y2=0, yz=~, y4=~, ys=y, ys=u the system of differential equations of perturbed motion acquires the form
b 0 h o b H o y , = -- 7- y~ -- ~ yz -t- ---~y~ - - - ~ y,~ly,, I; (2.3)
Y3=--~vY3q-~ Yt------vYs--uYl--Y6; ( 2 . 4 )
a �9 b~ (hu -]- h~) Y6 - - h~ v (yi J- ys) --t- --~ yt,. ( 2 . 5 ) Y~ =-- Y~; Y~ = --m Y~ -- ra - ra
Later on we transform in subsystem (2.3)-(2.5) to the canonical variables z k (k = i, ..., 6).
Section 3. We choose a Lyapunov vector-function with the following components, correspon- ing t'o subsystems (2.3)-(2.5):
V~, = 9h, P~, ---- z2~_l e-i~ Pk = z~h ei% (k = 1, 2, 3).
After several transformations we obtain
Vl .~- - -a t t y t - ] . -a t2~- -?y~; V2=aziy i - -a2~z--} -azay3;
V 3 = a 3 ~ i + a 3 ~ y z - - ~ s , (3.3_)
where
a t t = h0/(2J) , ai~ = - - bS~ sin Ot/(vJkO, ,~ = 2HeS t I $t I sin OJ(Jkt);
a m = o (Q cos 0 i -- St s in O~)/k 2, ~ 3 = QSs/k3, aas = h/(2m);
ast ~--- -- vh~ sin 0 a cos OJ(mks), a ~ = sin 0 s (a cos O~ -- h~S2)/(mks);
k, ----- V - 4 b e J - - h~/(2J), k 2 = o V ~ - - ~ / 2 , k s = V 4byrn " h~/(2m);
Q = % sin 0 ~ - - k 2 cos 0~, St = a i cos 0 t + ki sin Ot;
S z = % cos 0 z + k~ sin Os, S~ . = as cos 03 W ks sin 03;
a, = hJ (23 ) , a 2 = ~ / 2 , as = h/(2m), h = h~ + h,,.
For fixed 0 k (k = i, 2, 3) we estimate the derivatives of (3.1) so as to satisfy the Wazewski condition.
The attraction region of a singular point is determined by the inequalities
y•> O2a1~--a lIDi ; u
>y?o,./o,, 0 0 Y~ > yiOs/O.
whe re
1127
D t --~ a~2aaa-- a~saaz; Dz = a~iaaa + azaam, Ds = azlaz~ + aaia~.
The bar denotes here the coefficient after estimates. The presence of an attraction region at a nonvanishing singular point of the comparison system in the case
D2~2 > atlDl
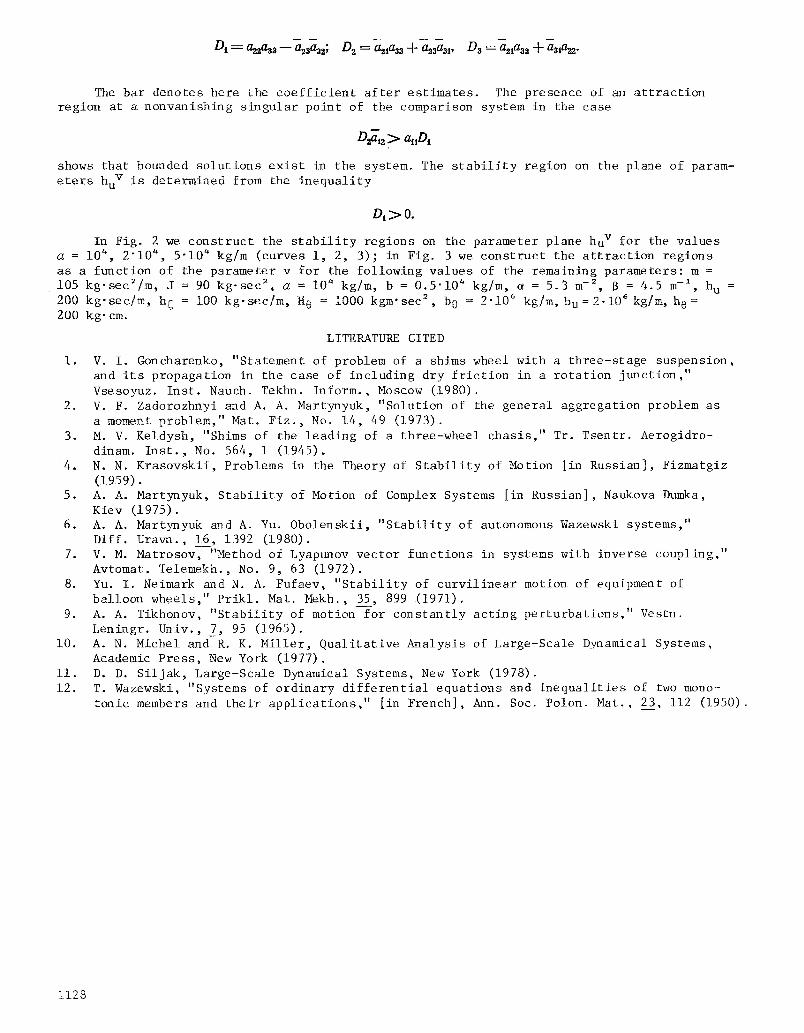
shows that bounded solutions exist in the system. The stability region on the plane of param- eters huV is determined from the inequality
Di>0.
In Fig. 2 we construct the stability regions on the parameter plane hu v for the values a = 10 4 , 2"10 4 , 5"10 4 kg/m (curves i, 2, 3); in Fig. 3 we construct the attraction regions as a function of the parameter v for the following values of the remaining parameters: m = 105 kg-sec2/m, J = 90 kg-sec 2, a = 104 kg/m, b = 0.5"104 kg/m, ~ = 5.3 m -2, B = 4.5 m -I, h u = 200 kg-sec/m, h E = I00 kg-sec/m, H% = i000 kgm'sec =, b 0 = 2"106 kg/m, b u=2-106 kg/m, h0= 200 kg'cm.
LITERATURE CITED
i. V. I. Goncharenko, "Statement of problem of a shims wheel with a three-stage suspension, and its propagation in the case of including dry friction in a rotation junction," Vsesoyuz. Inst. Nauch. Tekhn. Inform., Moscow (1980).
2. V. F. Zadorozhnyi and A. A. Martynyuk, "Solution of the general aggregation problem as a moment problem," Mat. Fiz., No. 14, 49 (1973).
" Tr. Tsentr Aerogidro- 3. M. V. Keldysh, "Shims of the leading of a three-wheel chasis~ dinam. Inst., No. 564, 1 (1945).
4. N. N. Krasovskii, Problems in the Theory of Stability of Motion [in Russian], Fizmatgiz (1959).
5. A. A. Martynyuk, Stability of Motion of Complex Systems [in Russian], Naukova Dumka, Kiev (1975).
6. A. A. Martynyuk and A. Yu. Obolenskii, "Stability of autonomous Wazewski systems," Diff. Uravn., 16, 1392 (1980).
7. V. M. Matrosov, "Method of Lyapunov vector functions in systems with inverse coupling," Avtomat. Telemekh., No. 9, 63 (1972).
8. Yu. I. Neimark and N. A. Fufaev, "Stability of curvilinear motion of equipment of balloon wheels," Prikl. Mat. Mekh., 35, 899 (1971).
9. A. A. Tikhonov, "Stability of motion for constantly acting perturbations," Vestn. Leningr. Univ., !, 95 (1965).
i0. A. N. Michel and R. K. Miller, Qualitative Analysis of Large-Scale Dynamical Systems, Academic Press, New York (1977).
ii. D. D. Siljak, Large-Scale Dynamical Systems, New York (1978). 12. T. Wazewski, "Systems of ordinary differential equations and inequalities of two mono-
tonic members and their applications," [in French], Ann. Soc. Polon. Mat., 2/B, 112 (1950).
1128
















![Stability and Robustness Analysis of Nonlinear Systems via ... · Contraction analysis is a relatively recently developed stability theory for nonlinear systems analysis [13]. The](https://img.pdfslide.us/doc/110x75/5f6a60967d71bf394d22644b/stability-and-robustness-analysis-of-nonlinear-systems-via-contraction-analysis.jpg)