Embed Size (px)
Citation preview
This article was downloaded by: [University of Guelph]On: 22 October 2012, At: 02:06Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of Systems SciencePublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tsys20
Non-linear adaptive sliding mode switching controlwith average dwell-timeLei Yu a , Maoqing Zhang a & Shumin Fei ba School of Mechanical and Electrical Engineering, Soochow University, Suzhou 215021,Chinab School of Automation, Southeast University, Nanjing 210096, China
Version of record first published: 28 Jul 2011.
To cite this article: Lei Yu, Maoqing Zhang & Shumin Fei (2011): Non-linear adaptive sliding mode switching control withaverage dwell-time, International Journal of Systems Science, DOI:10.1080/00207721.2011.604739
To link to this article: http://dx.doi.org/10.1080/00207721.2011.604739
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.tandfonline.com/page/terms-and-conditions
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form toanyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae, and drug doses shouldbe independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims,proceedings, demand, or costs or damages whatsoever or howsoever caused arising directly or indirectly inconnection with or arising out of the use of this material.

International Journal of Systems Science2011, 1–8, iFirst
Non-linear adaptive sliding mode switching control with average dwell-time
Lei Yua*, Maoqing Zhanga and Shumin Feib
aSchool of Mechanical and Electrical Engineering, Soochow University, Suzhou 215021, China;bSchool of Automation, Southeast University, Nanjing 210096, China
(Received 17 September 2010; final version received 1 July 2011)
In this article, an adaptive integral sliding mode control scheme is addressed for switched non-linear systems inthe presence of model uncertainties and external disturbances. The control law includes two parts: a slide modecontroller for the reduced model of the plant and a compensation controller to deal with the non-linear systemswith parameter uncertainties. The adaptive updated laws have been derived from the switched multiple Lyapunovfunction method, also an admissible switching signal with average dwell-time technique is given. The simplicity ofthe proposed control scheme facilitates its implementation and the overall control scheme guarantees the globalasymptotic stability in the Lyapunov sense such that the sliding surface of the control system is well reached.Simulation results are presented to demonstrate the effectiveness and the feasibility of the proposed approach.
Keywords: adaptive integral sliding mode control; switched multiple Lyapunov function; average dwell-time
1. Introduction
The control of switched non-linear systems which arise
in many practical processes is an important topic in the
field of control (Branicky 1998; Liberzon 2003; Han,
Ge, and Lee 2009; Wu 2009; Yang, Cocquempot, and
Jiang 2009; Yu, Fei, and Li 2010; Zhang and Shi 2011).
Typically, a switched system consists of a number of
subsystems and a switching law (or signal), which
defines a specific subsystem being activated during a
certain interval of time. Many significant approaches
have been developed to deal with this control problem
in the past few years.On the other hand, sliding mode control is a well-
known robust control technique against parameter
uncertainties, external disturbances and unmodelled
dynamics (Roh and Oh 2000; Chen 2006; Guan and
Pan 2008). However, it has some disadvantages such as
chattering or high frequency oscillation in practical
applications. Adaptive control is an effective approach
to handle parameter variations (Ruan, Yang, Wang,
and Li 2006; Labiod and Guerra 2007; Liu, Tong, and
Li 2010). Known as a valid method to overcome
system uncertainties, especially uncertainties derived
from uncertain parameters, adaptive control schemes
are used to automatically adjust the response of the
controller to compensate for changes in the response of
the plant. Therefore, adaptive sliding mode control has
the advantages of combining the robustness of variable
structure methods with the control capability ofadaptive control. Recently, the adaptive sliding modecontroller designed for linear and non-linear systemshas been studied by some researchers (Chen 2006;Guan and Pan 2008). Chen (2006) has addressed anadaptive sliding controller for an electro-hydraulicsystem driven by a double-rod actuator with non-linearuncertain parameters. Also, an adaptive sliding modetracking controller is designed for a general class ofdiscrete-time MIMO systems with unknown parame-ters and disturbances (Guan and Pan 2008).
However, the adaptive sliding mode controlmethod applying to switched non-linear systems isreally very few. In this article, we will develop theadaptive integral sliding mode control scheme for aclass of switched non-linear systems with modeluncertainties and external disturbance. The mainfeatures of this study include: (1) we have designedthe adaptive sliding mode control scheme for simplicityusing some concise definitions, which is suitable forpractical implementation; (2) by designing an adaptiveintegral sliding mode compensation controller, a novel-type multiple switched Lyapunov function is devel-oped; (3) the update laws derived from the switchedmultiple Lyapunov function method can ensure theboundedness of parameter estimates. The asymptoti-cally stable adaptive controller together with aneffective adaptation law designed in this article cancompensate for the external disturbance of switched
*Corresponding author. Email: [email protected]
ISSN 0020–7721 print/ISSN 1464–5319 online
� 2011 Taylor & Francis
DOI: 10.1080/00207721.2011.604739
http://www.informaworld.com
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012

non-linear systems, and especially for the non-linearuncertain parameters.
The outline of this article is as follows. In Section 2,problem formulation and the detailed model arepresented. In Section 3, the proposed adaptive integralsliding mode compensation control strategy is givenfor the uncertain non-linear switched systems. InSection 4, the experiment is set up and results arediscussed using two examples. Finally, a conclusion isthen followed in Section 5.
2. Problem formulation
Consider a class of uncertain switched non-linearsystems as follows:
x1�¼ x2 þ !�ðtÞ,1ðxÞ � �
x2�¼ x3 þ !�ðtÞ,2ðxÞ � �
� � �
x�
n�1¼ xn þ !�ðtÞ,n�1ðxÞ � �
xn�¼ f�ðtÞðxÞ þ g�ðtÞðxÞ � uþ !�ðtÞ,nðxÞ � �þ d�ðtÞðtÞ
8>>>>>>>><>>>>>>>>:
ð1Þ
where t � 0, x ¼ ðx1, x2, . . . , xnÞT2 Rn denotes the
state vector of the systems, which is available; u 2 Rand y 2 R are input and output, respectively; �ðtÞ :½0,þ1Þ is the piecewise constant switching signaltaking value from the finite index set � ¼
deff1, 2, . . . , pg.
If �ðtÞ ¼ i, then we say that the ith subsystem is activeand the remaining subsystems are inactive.d ðtÞ 2 L2½0,1Þ is the external disturbance; � ¼ð�1, �2, . . . , �nÞ
T2 Rn is the given uncertain constant
parameter and fiðxÞ, giðxÞ,!iðxÞ ði 2 �Þ are allsmooth functions.
The control problem is to guarantee that theresulting closed-loop system is asymptotically stablein the Lyapunov sense and the sliding surface of thecontrol system is reached. The following assumptionsare made on system (1).
Assumption 2.1: The plant order n, fiðxÞ, giðxÞ and!iðxÞ are known.
Assumption 2.2: The external disturbance d(t) isbounded, assuming that the upper bound of the distur-bance d(t) is D, i.e. jd ðtÞj � D, where D4 0 is given.
3. Design of adaptive integral sliding mode
compensation controller
To ensure the stability of the closed-loop system andthe reachability of the sliding mode surface, we willdesign the control law which is composed of two
parts: one slide mode controller us for the reduced
model of the plant and the other controller, as a
compensator, uc to deal with the non-linear systems
with parameter uncertainties. So we define the control
law as follows:
u ¼ us þ uc ð2Þ
Substituting (2) into (1) we have:
xn�¼ f�ðtÞðxÞ þ g�ðtÞðxÞ � us þ g�ðtÞðxÞ � uc
þ !�ðtÞ,nðxÞ � �þ d�ðtÞðtÞ ð3Þ
In order to illustrate the proposed control scheme
in practical implementation, we take the notations in
the following form:
Fi ¼ ½x2,x3, . . . , xn, fiðxÞ þ giðxÞus þ diðtÞ�Tð4Þ
Wi ¼ ½!1ðxÞ,!2ðxÞ, . . . ,!nðxÞ�T
ð5Þ
Gi ¼ ½0, 0, . . . , giðxÞ�T
ð6Þ
From (4)–(6), system (1) can be expressed as:
x�¼ Fi þWi � �þ Gi � uc ð7Þ
Let the sliding mode surface be defined by:
s ¼ Kc xðtÞ � xðt0Þ �
Z t
t0
Fixð�Þ d�
� �ð8Þ
As we know, when x�¼ Fi, the system is global
exponential asymptotical stability such that
limt!1ðWi � �þ Gi � ucÞ ¼ 0 ð9Þ
Then, the dynamics of sliding mode surface can be
given by:
s�¼ Kc½WiðxÞ�þ GiðxÞuc� ð10Þ
According to feedback linearisable techniques and
the control theory of sliding model control
(Kanellakopoulos, Kokotovic, and Morse 1991;
Yoon, Park, and Yoon 2008), the control law of
system (1) is chosen as:
us ¼1
giðxÞð�Ksx� fiðxÞÞ
uc ¼1
Kc � Gi�� sgnðsÞ � KcFi�� �
8>><>>: ð11Þ
where
sgnðsÞ ¼
1 for s4 0
0 for s ¼ 0
�1 for s5 0
8><>:
2 L. Yu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012

then the following equation (i.e. the control law) can be
written easily from Equations (9) and (10):
u ¼1
giðxÞ�Ksx� fiðxÞð Þ þ
1
Kc � Gi�� sgnðsÞ � KcFi�� �
ð12Þ
where � is the known positive parameter; Ks ¼
ðks1, ks2, . . . , ksnÞ and Kc ¼ ðkc1, kc2, . . . , kcnÞ are,
respectively, n-dimensional constant vectors; � is the
estimate value of �, and the estimate error ~� is
described by
~� ¼ �� � ð13Þ
The estimate � for the sliding model control system
is updated by the following normalised adaptive law:
��
¼ ½sKcWiðxÞ�T
ð14Þ
For the switching signal �, a switching sequence is
given by:X:¼ ði0, t0Þ, ði1, t1Þ, . . . , ðik, tkÞ, . . . , jik 2 �, k 2 N� �
ð15Þ
where ðik, tkÞ denotes that the ikth subsystem is
switched on at tk, and the ikþ1th subsystem is switched
off at tkþ1. Where t0 is the initial time and tk 4 0 is the
kth switching time. When t 2 ½tk, tkþ1Þ, the trajectory of
the switched non-linear system (1) is produced by the
ikþ1th subsystem, defining �P ¼ tk � tk�1 as dwell-time
of the ikth subsystem.
Assumption 3.1: For t 2 ðtk�1, tk� 2 �m ðm 2 � ¼def
f1, 2, . . . , ngÞ and t 2 ðtk, tkþ1� 2 �mþ1, there is a con-
stant 0 � � � 1 such that
sðtkþ1Þ�� �� � � � sðtkÞ�� �� ð16Þ
In this article, it is assumed that � ¼ 1 (Colaneri,
Geromel, and Astolfi 2008; Mohamad and Liu 2008).
Definition 3.1: Given some family of switching signals
�, for each � and t � t0 � 0, let N�ðt0, tÞ denote the
number of discontinuities of �in the interval ½t0, tÞ
(Kanellakopoulos, Kokotovic, and Morse 1991;
Hespanha and Morse 1999; Persis, Santis, and
Morse 2003). For given �D, N0 4 0, we denote by
�ave½�D,N0� the set of all switching signals for which
N�ðt0, tÞ � N0 þt� t0�D
ð17Þ
The constant �D is called the average dwell-time and
the chatter bound is N0. So the switching signal
�ave½�D,N0� � � consisting of all switching signals has
the same persistent dwell-time �D 4 0 and the same
persistent chatter bound N0 4 0.
Assumption 3.2: For each piecewise constant switchingsignal �, the switched non-linear system can be definedas follows:
x�¼ f�ðx, u, d Þ ð18Þ
For each � 2 �, it is shown that (18) is uniformlyasymptotically stable over � such that
xk k � ðc xðt0Þ�� ��Þ1=$e�ðt�t0Þ $
þ �0
Z t
t0
uð�Þ�� ��2 d� þ ðtÞ 8t � t0 4 0 ð19Þ
where c, $, �0 are suitable positive real numbers and ðtÞ the continuous non-negative function.
Lemma 3.1: Given a set �f¼Df fiðx, u, d Þ : i 2 �g of
non-linear maps from Rn to itself for which Assumption3.2 holds (Hespanha and Morse 1999; Persis, Santis,and Morse 2003). For any average dwell-time �D � �
D,
which �D is a finite constant and any chatter boundN0 4 0, the switching system (18) is uniformly asymp-totically stable over �ave½�D,N0� and there exist contin-uously differentiable functions Vi : R! Rn, i 2 �,positive constants �1, �2 and functions 1, 2 of classK1 satisfying that
�1 xk kð Þ � ViðxÞ � �2 xk kð Þ ð20Þ
@Vi
@x� fiðx, u, d Þ � �21 � ViðxÞ ð21Þ
ViðxÞ � 2 � Vj ðxÞ ð22Þ
for each x 2 Rn and i, j 2 �.
Remark 1: The idea of Assumption 3.1 is that even ifthere exists a Lyapunov function Vi for each sub-system, individually, restrictions must be placed on theswitching scheme to guarantee stability of the overallswitched system. Also, as we know, the initial value ofthe sliding mode surface in this study is sð0Þ4 0.According to the theory of sliding mode control, theresulting closed-loop control system in this article isstable in Lyapunov sense such that the function ofsliding mode surface sðtÞ is monotonically non-increasing.
Remark 2: From the definition of a Lyapunovfunction, Vi is monotonically non-increasing on everytime interval where the ith subsystem is active, and theset �m represents the part of the state space where
V�
i � 0. The idea of Assumption 3.1 is that even if thereexist the sliding mode surface and the Lyapunovfunction for each subsystem, restrictions must beplaced on the switching scheme to guarantee stabilityof the overall switched system. In fact, it is possible toconstruct examples of globally asymptotically stable
International Journal of Systems Science 3
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012

systems and a switching rule that sends all trajectories
to infinity (Branicky 1998). A sufficient condition to
guarantee Lyapunov stability is to require, as in (16),
that for every mode i, the value of Vi at the beginning
of each interval on which the ith subsystem is active
not exceeding the value at the beginning of such
previous interval.
Based on the above analysis, for the uncertain
switched non-linear system (1), we have the following
result.
Theorem 3.1: Consider system (1) satisfying
Assumptions (2.1, 2.2, 3.1 and 3.2) and Lemma 3.1
controlled by the adaptive controller (12). With the
proposed adaptation law and the switching signal with
average dwell-time method, it can be guaranteed that the
resulting closed-loop switched system is asymptotically
stable in the Lyapunov sense and uniformly ultimately
bounded while the actual output follows the desired
output signal and the sliding surface of the control
system is reached.
Proof: Define a switched multiple Lyapunov function
candidate to analyse the stability of system (1) as:
V ¼1
2s2 �
Xni¼1
iðtÞ þ ~�T ~�
!ð23Þ
with the characteristic function:
iðtÞ :¼1 t 2�i
0 t =2 �i
�,
�i ¼ ft j the ith subsystem is active at time instant tg
For t 2 ðtk�1, tk� 2 �m and t 2 ðtk, tkþ1� 2 �mþ1, from
(16) and (23), we have:
DVðtÞ ¼ Vðtkþ1Þ � VðtkÞ
¼1
2sðtkþ1Þ
2�1
2sðtkÞ
2
¼1
2sðtkþ1Þ�� ��2� 1
2sðtkÞ�� ��2 5 0 ð24Þ
From the switching signal (17), for 8t 2 ½tk, tkþ1� 2 �m,
taking the time derivative of V, we get:
V�
¼ s s�þ ~�T ~�
�
¼ sKc½WiðxÞ�þ GiðxÞuc� þ ~�T ~��
¼ s½KcWiðxÞ�� � sgnðsÞ � KcWiðxÞ�� þ ~�T ~��
¼ �� sj j þ sKcWiðxÞð�� �Þ þ ~�T ~��
ð25Þ
Then, according to the update law (12) and ~��
¼ ���
, we
obtain:
V�
¼ �� sj j þ sKcWiðxÞ ~�� ~�T ��
¼ �� sj j þ ~�T½sKcWiðxÞ�T� ~�T �
�
¼ �� sj j � 0 ð26Þ
So the stability of closed-loop system can be guaran-
teed. In what follows, it is verified that the sliding
surface of the control system can be reached, i.e.
limt!1 sðtÞ ¼ 0.The equality V
�
¼ ��jsj implies that s is
integrable as
limt!1
Z t
0
sj j dt ¼1
�Vð0Þ � VðtÞ½ �:
As we know, since Vð0Þ is bounded and VðtÞ is mono-
tonically non-increasing and bounded, it has been
deduced that limt!1
R t0 sj j dt and s
�are both bounded.
According to Barbalat’s Lemma (Slotine and Li 1991;
Yu, Fei, and Li 2010), all the variables of the closed-
loop system are bounded in the presence of model
uncertainties and external disturbances. Also, we can
conclude that sðtÞ will asymptotically converge to zero
by choosing the design parameters appropriately, i.e.
limt!1
sðtÞ ¼ 0:
So the sliding surface of the control system has been
reached.So far, the proof of Theorem 1 and the
controller design with adaptive integral sliding mode
method have been completed.
Remark 3: In the adaptive slide mode controller
designed by this article, uc has to be discontinuous, so
this will lead to chattering. Generally, chattering must
be eliminated for the controller to perform properly. It
can be achieved by smoothing out the control discon-
tinuity for uc as follows (Roh and Oh 2000; Ho, Ho,
and Rad 2009):
uc ¼1
Kc � Gi�� sgn
s
"
� �� KcFi�
� �ð27Þ
where "4 0 is a design parameter.
Remark 4: The ultimate bound for the system track-
ing error can be made smaller by increasing the given
uncertain constant parameter. This will result in
increased interaction with unknown or unmodelled
plant dynamics.
Remark 5: Though the update laws using tuning
functions (14) without projection always ensure the
boundedness of parameter estimates, the correspond-
ing parameter bounds are dependent of
4 L. Yu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012
design parameters. As will be seen in Section 3, theboundedness of parameter estimates is desired indealing with the control problem for the uncertainswitched non-linear systems.
Remark 6: The control law u in (12) is only true overa compact set Uc � Rn on which giðxÞ 6¼ 0, also Gi 6¼ 0.
4. Illustrative example
In this section, we apply our proposed adaptiveintegral sliding mode controller for two cases. Thefirst example is to let the model of switched non-linearsystems including non-linear uncertainties and externaldisturbance. The second practical example for electro-hydraulic servo system is choosing the model ofswitched non-linear systems without uncertainties. Sothe Example 2 is the special case of the Example 1.
Example 1: Consider the switched systems withuncertainties as follows:
X21
:
x1�¼ x2 þ !11 � �1
x2�¼ x3 þ !12 � �2
x3�¼ x31 þ x22 þ 5uþ !13 � �3 þ d1
8><>: ð28Þ
X22
:
x1�¼ x2 þ !21 � �1
x2�¼ x3 þ !22 � �2
x3�¼ x21 þ 2uþ !23 � �3 þ d2
8><>: ð29Þ
where d ¼ ½d1 d2� ¼ ½0:5 sinðtÞ 0:6 sinðtÞ�, !1 ¼
½!11 !12 !13� ¼ ½2x21 � x2 x1 � x
22 sinx1 � x2�, !2 ¼
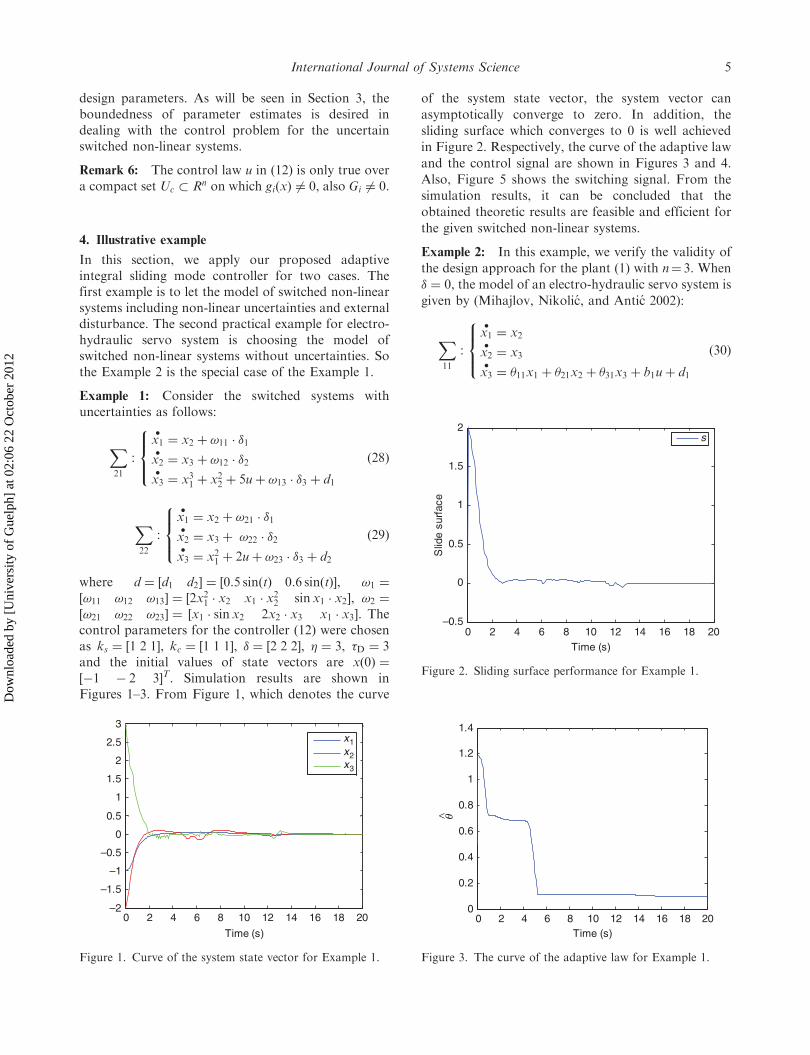
½!21 !22 !23� ¼ ½x1 � sin x2 2x2 � x3 x1 � x3�. Thecontrol parameters for the controller (12) were chosenas ks ¼ ½1 2 1�, kc ¼ ½1 1 1�, � ¼ ½2 2 2�, � ¼ 3, �D ¼ 3and the initial values of state vectors are xð0Þ ¼½�1 � 2 3�T. Simulation results are shown inFigures 1–3. From Figure 1, which denotes the curve
of the system state vector, the system vector can
asymptotically converge to zero. In addition, the
sliding surface which converges to 0 is well achieved
in Figure 2. Respectively, the curve of the adaptive law
and the control signal are shown in Figures 3 and 4.
Also, Figure 5 shows the switching signal. From the
simulation results, it can be concluded that the
obtained theoretic results are feasible and efficient for
the given switched non-linear systems.
Example 2: In this example, we verify the validity of
the design approach for the plant (1) with n¼ 3. When
� ¼ 0, the model of an electro-hydraulic servo system is
given by (Mihajlov, Nikolic, and Antic 2002):
X11
:
x1�¼ x2
x2�¼ x3
x3�¼ 11x1 þ 21x2 þ 31x3 þ b1uþ d1
8><>: ð30Þ
0 2 4 6 8 10 12 14 16 18 20–2
–1.5
–1
–0.5
0
0.5
1
1.5
2
2.5
3
Time (s)
x1x2x3
Figure 1. Curve of the system state vector for Example 1.
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (s)
q<
Figure 3. The curve of the adaptive law for Example 1.
0 2 4 6 8 10 12 14 16 18 20–0.5
0
0.5
1
1.5
2s
Time (s)
Slid
e su
rfac
e
Figure 2. Sliding surface performance for Example 1.
International Journal of Systems Science 5
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012
X12
:
x1�¼ x2
x2�¼ x3
x3�¼ 12x1 þ 22x2 þ 32x3 þ b2uþ d2
8><>: ð31Þ
where
1i ¼4CtpeK
miVt, 2i ¼
K
miþ4A2emiVt
, 3i ¼4eCtp
miVt,
bi ¼4AemiVt
kvCdw
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPs � sgnðxvÞPL
�
s,
di ¼ �4eCtpFe
Vt�
Fe
�
mi:
The physical parameters of this electro-hydraulic servo
system are given in Table 1. In addition, the mass of
actuator and load is chosen as m1 ¼ 20 kg, m2 ¼ 24 kg.
Using the method of the Example 2 designed in
this article, Figures 6 and 7 show the simulation
0 2 4 6 8 10 12 14 16 18 20–0.5
0
0.5
1
1.5
2
Time (s)
Slid
e su
rfac
e
s
Figure 7. Sliding surface performance for Example 2.
0 2 4 6 8 10 12 14 16 18 20–2
–1.5
–1
–0.5
0
0.5
1
1.5
2
2.5
3
Time (s)
x1
x2x3
Figure 6. Curve of the system state vector for Example 2.
Table 1. Physical parameters of the electro-hydraulic servosystem.
Name Symbol Unit
Supply pressure Ps PaTotal actuator volume Vt M3
Effective bulk modulus e PaActuator ram area A m2
Total leakage coefficient Ctp M3/(s �Pa)Discharge coefficient CdSpool valve area gradient W MFluid mass density � Kg/m3
Mass of actuator and load mi KgSpring constant K N/mLoad pressure PL PaSpool displacement xv MCoulomb friction Fe N
0 1 2 3 4 5 6 7 8 9 10111213141516171819200
0.5
1
1.5
2
2.5
3
Time (s)
s(t
)
Figure 5. The switching signal.
0 2 4 6 8 10 12 14 16 18 20–1.5
–1
–0.5
0
0.5
1
Time (s)
Con
trol
inpu
t
u
Figure 4. The curve of the control signal for Example 1.
6 L. Yu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012

results for the proposed adaptive sliding mode controlhaving satisfactory control performance. So theexperimental results point out that the stable andwell-damped response of the control system isobtained.
Remark 7: From the comparison and analysis of thetwo examples, we can see that: (1) the controller ofthe system proposed in this article can both guaranteethe global stability of the closed-loop system and theultimate convergence of all the states in the closed-loop system; (2) the proposed control scheme hassatisfactory performance and robustness even in thepresence of unmodelled dynamics and disturbances.Therefore, such an adaptive integral sliding modecompensation controller would be inadequate toaddress the complex control systems where thereexist appreciable non-parametric uncertainties whichinclude unmodelled dynamics, external disturbancesand other imperfections in the estimates of systemparameters.
Remark 8: Even though the switching conditionsrequire knowledge of the temporal evolution of theclosed-loop state, xðtÞ, the a priori knowledge of thesolution of the constrained closed-loop non-linearsystem (which is difficult to obtain in general) is notneeded for the practical implementation of theproposed approach. Instead, the supervisor canmonitor (on-line) how x evolves in time to determineif and when the switching conditions are satisfied. Ifthe conditions are satisfied for the desired targetmode at some time, then switching can take placesafely.
Remark 9: In this section, the proposed adaptivesliding mode controller incorporates the capability tomaintain stable performance for switched non-linearsystems. From the control point of view, designing asatisfactory robust controller to enhance robustnessand maintain boundedness is very important for thecontrol performance. H-infinity control method as apopular robust strategy may be another choice. Fromthe application point of view, the control schemeproposed is suitable for practical implementation.Also, from the modelling point of view, we haveconsidered the uncertainty and external disturbances.So we can use neural networks or fuzzy systems as atool for modelling non-linear functions up to a smallerror tolerance for future work.
5. Conclusion
In this article, we have investigated the adaptiveintegral sliding mode control method with averagedwell-time technique for a class of uncertain switched
non-linear systems. It is proved that closed-loop systemis asymptotically stable in the Lyapunov sense and thesliding surface of the control system is obtained.Simulation results show that the proposed controlmethod has satisfactory performance and robustness inthe presence of model uncertainties and externaldisturbance. The control scheme is simple and practicalto improve the dynamic system’s transient responseand robustness, also has a broad future in engineeringapplications. Therefore, from the practical point ofview, the technique can successfully be applied topractical control systems and this can be extended tothe other non-affine non-linear systems.
Acknowledgements
The authors gratefully acknowledge the anonymousreviewers for their constructive and insightful comments forfurther improving the quality of this study. This study issupported by the National Natural Science Foundation ofChina, nos 60835001, 60804017 and 60764001.
Notes on contributors
Lei Yu was born in Xuancheng, P.R.China, 1983. He received his MSdegree in Control Theory andControl Engineering from HefeiUniversity of Technology, China, in2008 and the PhD in AutomaticControl Theory and Applicationsfrom Southeast University in 2011.He is now a Lecturer in the College of
Mechanical and Electrical Engineering, Soochow University.His research interests include switched nonlinear systems,robust adaptive control, neural network control, etc.
Maoqing Zhang was born in 1954.He received his MS degree fromYanshan University, Qinghuangdao,P.R. China, 1983. He is now aProfessor in the Research Institute ofMechanical and ElectricalEngineering at Soochow University,Suzhou, P.R. China. His researchinterests include control theory and
control engineering, and fuzzy control, etc.
Shumin Fei was born in 1961. Hereceived his PhD from BeihangUniversity, Beijing, P.R. China,1995. From 1995 to 1997, he didPostdoctoral Research in theResearch Institute of Automation atSoutheast University. He is now aProfessor in the Research Institute ofAutomation at Southeast University,
Nanjing, P.R. China. His research interests include theanalysis and synthesis of nonlinear systems, robust control,adaptive control and analysis and synthesis of time-delaysystems, etc.
International Journal of Systems Science 7
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012

References
Branicky, M. (1998), ‘Multiple Lyapunov Functions and
Other Analysis Tools for Switched and Hybrid Systems’,IEEE Transactions on Automatic Control, 43, 475–482.
Chen, X.K. (2006), ‘Adaptive Sliding Mode Control for
Discrete-time Multi-input Multi-output Systems’,Automatica, 42, 427–435.
Colaneri, P., Geromel, J.C., and Astolfi, A. (2008),
‘Stabilization of Continuous-time Switched NonlinearSystems’, Systems and Control Letters, 57, 95–103.
Guan, C., and Pan, S.X. (2008), ‘Adaptive Sliding ModeControl of Electro-hydraulic System with Nonlinear
Unknown Parameters’, Control Engineering Practice, 16,1275–1284.
Han, T.T., Ge, S.S., and Lee, T.H. (2009), ‘Adaptive Neural
Control for a Class of Switched Nonlinear Systems’,Systems and Control Papers, 58, 109–118.
Hespanha, J., and Morse, A.S. (1999), ‘Stability of Switched
Systems with Average Dwell-time’, in Proceedings of the38th IEEE Conference on Decision and Control, Phoenix,Arizona, pp. 2655–2660.
Ho, H.F., Ho, Y.K., and Rad, A.B. (2009), ‘Adaptive FuzzySliding Mode Control with Chattering Elimination forNonlinear SISO Systems’, Simulation Modelling Practiceand Theory, 17, 1199–1210.
Kanellakopoulos, I., Kokotovic, P.V., and Morse, A.S.(1991), ‘Systematic design of adaptive controllers forfeedback linearizable systems’, IEEE Transactions on
Automatic Control, 36, 1241–1253.Labiod, S., and Guerra, T.M. (2007), ‘Direct Adaptive FuzzyControl for a Class of MIMO Nonlinear Systems’,
International Journal of Systems Science, 38, 665–675.Liberzon, D. (2003), Switching in Systems and Control,Boston, MA: Birkhauser.
Liu, Y.J., Tong, S.C., and Li, Y.M. (2010), ‘Adaptive Neural
Network Tracking Control for a Class of Non-linearSystems’, International Journal of Systems Science, 41,143–158.
Mihajlov, M., Nikolic, V., and Antic, D. (2002), ‘PositionControl of an Electro-hydraulic Servo System using Sliding
Mode Control with Fuzzy’, Facta University Atis (Series:Mechanical Engineering), 1, 1217–1230.
Mohamad, S.A., and Liu, X.Z. (2008), ‘On Stability ofLinear and Weakly Nonlinear Switched Systems with Time
Delay’, Mathematical and Computer Modelling, 48,1150–1157.
Persis, C.D., Santis, R.D., and Morse, A.S. (2003), ‘Switched
Nonlinear Systems with State-dependent Dwell-time’,Systems and Control Letters, 50, 291–302.
Roh, Y., and Oh, J. (2000), ‘Sliding Mode Control
with Uncertainty Adaptation for Uncertain Input-delay Systems’, International Journal of Control, 73,1255–1260.
Ruan, R.Y., Yang, C.L., Wang, Z.M., and Li, Y.Z. (2006),
‘Robust Adaptive Output-feedback Control for a Classof Nonlinear Systems with General Uncertainties’,International Journal of Systems Science, 37, 207–224.
Slotine, J.J., and Li, W.P. (1991), Applied Nonlinear Control,Englewood Cliffs, NJ: Prentice Hall.
Wu, J.L. (2009), ‘Stabilizing Controllers Design for Switched
Nonlinear Systems in Strict-feedback Form’, Automatica,45, 1092–1096.
Yang, H., Cocquempot, V., and Jiang, B. (2009), ‘On
Stabilization of Switched Nonlinear Systems withUnstable Modes’, Systems and Control Letters, 58,703–708.
Yoon, S.S., Park, J.K., and Yoon, T.W. (2008), ‘Dynamic
Anti-windup Scheme for Feedback Linearizable NonlinearControl Systems with Saturating Inputs’, Automatica, 44,3176–3180.
Yu, L., Fei, S.M., and Li, X. (2010), ‘RobustAdaptive Neural Tracking Control for a Class ofSwitched Affine Nonlinear Systems’, Neurocomputing, 73,
2274–2279.Zhang, L., and Shi, P. (2011), ‘H1 Filtering for a Class ofSwitched Linear Parameter Varying Systems’, International
Journal of Systems Science, 42, 781–788.
8 L. Yu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f G
uelp
h] a
t 02:
06 2
2 O
ctob
er 2
012




![Verifying Average Dwell Time of Hybrid Systemspeople.csail.mit.edu/mitras/research/adt12.pdf · Hespanha [Hespanha and Morse 1999], define restricted classes of switching signals](https://img.pdfslide.us/doc/110x75/5e3d66121b7522003f20a8dd/verifying-average-dwell-time-of-hybrid-hespanha-hespanha-and-morse-1999-deine.jpg)