-
7/31/2019 Nip Dens
1/13
1
Visit to Nipp ond enso, July 29-30, 19911
Background
Ou r hosts for this visit were Mr. Fukaya, General Mana ger of
the Produ ction
Engineering Depar tm ent, Mr Tsuchiya, Fuk aya's R&D
Manager, a youngengineer Mr H arad a, and at d inner Mr Ito, the
Execut ive Managing Director
of Production Engineering.
Nipp ond enso Co Ltd. is a form er subsidiary of Toyota Motor
Co. that m akes a
w ide variety of autom otive comp onents, such as alternators,
motors and
actuators, air cond itioning systems, engine components and
controls,
rad iators, dash board displays, brake control systems, and so
on. It has
man ufacturing plants worldw ide to satisfy man y automotive
manu facturers.
H and ling the w ide diversity of produ ct models and respond
ing to the Just in
Time ord ering system p hilosoph y have heavily affected h ow N
ippon den so
designs and man ufactures produ cts.
Nipp ond enso is a high technology comp any. Basic and ap plied
research cover
materials, vacuum app aratus, semicond uctor fabrication m
ethods, ceramics,
robotics, vision systems, factory au toma tion software, simu
lation systems for
testing d river reactions, and CAD/ CAM. Major d esign th rusts
over the p ast 10
to 15 years includ e "ma naging d iversity," designing n ew p
rod ucts faster,
overlapp ing design tasks wh ile man aging risk, and dram
atically redu cing the
size and w eight of pr odu cts while increasing qu ality and
perform ance.
The company h as 41000 emp loyees. Of these, abou t 5000 are d
esign engin eers,
1500 are pr od uction engin eers. At the new R&D center w
here th e visit tookplace there are currently 150 researchers. A
major characteristic of
N ippon denso , which I have noted in man y previous reports
dating back to
1977, is that it makes mu ch of its own au tomation equip ment a
nd nearly all
of its 3500 robots. This com mitm ent to m anu factu ring equ
ipm ent excellence
is one pa rt of its comm itment to man ufacturing excellence in
gen eral.
The typical working year at N ipp ond enso and in Japa n
generally is 2200
hou rs, comp ared w ith 1800 in the US. The governm ent is
trying to get th is
red uced to 2000 by 1994 and 1800 by 1996. Each Japanese comp
any is
attemp ting to reach this target, facing var ious problem s.
1 I p u b l is h e d a p a p e r o n t h i s co m p a n y t h a
t c o n t a i n s in f o r m a t io n fr o m t h i s v is it
a n d o t h e r s g o in g b a c k m a n y y e a r s : " Ni p p
o n d e n s o Co . Lt d . , A Ca s e St u d y o f
St r a t e g i c Pr o d u c t D e s ig n , " R e s e a r c h i n
En g i n e e r i n g D e s i g n , (1 9 9 3 ) vo l 5 , p p 1 2
20 .
-
7/31/2019 Nip Dens
2/13
2
Nipp ond enso characterizes its pr odu cts as follows:
Quality first
Wide range of prod uct variety
High speed mass production
Mixed p rodu ction (several varieties in one p lace) Just in
Time produ ction m ethod
OEM sales mainly
These conflicting characteristics (especially variety, mass
production, and
mixed pr odu ction) have driven the comp any into a variety of
design and
autom ation method s. These are covered below.
Automation an d Produ ct Developm ent Techn iques
An imp ortant feature of Nipp ondenso is an obvious long term
enterprise-
w ide strategy for how to grow the company into a m aster of
manu facturingproducts with these characteristics. Nippondenso has
evolved a systematic
app roach to m anaging d esign p rocesses, designing carefully
to sup port JIT
operations, and developing larger and larger systems of
automation. In the
1950's they had "spot " au tom ation (wh at we wou ld call
islands); in the 60's
they h ad lines; in the 70's "areas," mean ing p resum ably
several lines of the
sam e typ e or severa l lines conn ected; in th e 80's and early
90's "cube" or
"totality." Such increasing au toma tion creates serious dan
gers for a comp any
w hose customers sw itch sp ecifications, alter m odel p rodu
ction v olumes,
dem and instant response to ord ers, and increase variety of
produ cts.
Nipp ondenso has only gradu ally realized how deep the dan gers
can be andhas instituted several procedu res for combatting th em.
These includ e
simu ltaneou s prod uct-process developm ent, a classification
of levels of
necessary flexibility in pr odu ction, and a classification of
degree of inn ovation
in d esign pr ojects.
Classifying Flexibility
N ipp ond enso's classifications are as follows:
Flexibility for Prod uct Variation - configuration, size, mod
el, and typ e are
levels of variability within the p rod uct itself that are
increasingly d ifficult forthe autom ation system to accommod
ate
Flexibility to Design Ch ange - m inor chang es are often easy
to accomm od ate,
mod el changes are hard er, and the next generation of the produ
ct usually
requires a new factory
-
7/31/2019 Nip Dens
3/13
3
Flexibility to Prod uction Volum e Chan ge - total volum e
fluctuation requires
reassigning man ufacturing systems to d ifferent prod ucts; grad
ually increasing
volume n ormally requires buying m ore capacity; fluctuations
amon g pr odu ct
types requ ire reassigning prod uction capability between the
types.
In response to th ese needs, Nipp ond enso has u tilized several
strategies,beginnin g in the 1960's: (See Exhibit 1)
FMS-0 - Use specialized autom ation with n o flexibility and mak
e rigidly
stand ard ized p rod ucts; an examp le is little control relays
- Mr Fukaya n otes
that strong efforts at standard ization occur even w hen au
tomation at levels 1,
2, and 3 below are adop ted. Furtherm ore, FMS -0 is the
preferred ap pr oach
and is used w herever possible.
FMS-1 - Design the p rod uct w ith several versions of each p
art, capab le of
being intermixed: 3 fronts, 4 midd les, 3 backs, total 36 typ
es; an exam ple is a
pan el meter gage, in w hich m any var ieties of one basic model
are m ademinu te by minute based on a stream of ord ers from Toyota
[Nevins and
Whitney]
FMS-2 - Design the pr odu ct with a common outer shell and
interchangeable
interiors, and p rovide robots and sensors as needed to make qu
ick changes
from one to an other; several mod els of an air cond itioner are
m ade th is way,
all being essentially the sam e size
FMS-3 - Design prod uct and process so intimately that one can
even change
the outside shell's length and d iameter withou t affecting the
autom ation
system . The Type III altern ator (see below) is an examp
le.
Flexibility m eans not only the ability to switch som e imp
ortan t factors of the
prod uct but to switch rap idly. Nipp ondenso has w orked over
the decades to
cut the changeover time from h our s to minutes to second s, w
hile at the same
time in creasing the rang e of flexibility.
The size of the prod uct is one of the m ost important factors
in the d esign of
an au tomation system. Sup porting a later change in pr odu ct
size without
rebu ild ing the system is almost im possible. Yet as cars
become smaller and
lighter, so mu st their compon ents. Only the largest cars can
take th e largest
compon ents; even here, however, the m anu factur ers are
pressing for smallercompon ents wh ich perform m ore fun ctions.
One can no longer simply
red uce the capability of the prod uct for use in a smaller car
w hile keeping th e
outer shell the same. The shell must shrink, too. As m ore
varieties of cars are
mad e, more sizes of the same p rodu ct are needed , each m ade
in smaller
prod uction volum es than before. Lower p rodu ction volumes
mean less
efficient au tomation u nless some w ay can be found to make all
sizes on one
-
7/31/2019 Nip Dens
4/13
4
autom ation system. Thus FMS-3 is a very difficult bu t imp
ortant level to
achieve.
Sum marizing, the u ltimate factory can m ake any qu antity of
any item
w ithout any penalty for switching. The d isadvantage of curr
ent autom ation
systems is that they ar e too focussed on a small range of mod
els of onepr odu ct. If d eman d for one version of alternat or,
say, rises w hile that for
another falls, the und erloaded line cann ot help the overloaded
one. Instead,
one mu st build more lines, resulting in overcapacity and w
asted investment.
Several generic appr oaches exist to this long-stand ing p
roblem: pred ict futu re
dem and perfectly, make sup er-intelligent m anu facturing
systems that can
switch, or d esign th e prod ucts and their manu facturing
processes to contain a
measure of alterability. I call the latter "smar t pr od ucts"
below. It is probably
the best of the thr ee app roaches, the first being obviously un
available and the
second beyond the current state of the art except in restricted
but v ery useful
situations. Nipp ondenso has adopted th e smart pr odu cts
approach andshow ed som e interesting examples.
Classification of N ew Product Developm ent Efforts
This classification is as follow s:
1. Inn ovative, totally new pr odu ct (10% of d esign efforts);
examp les includ e
active susp ension or CRT dashboard displays
2. Strategic new product (called Jikigata); these are major,
market-share-
grabbing imp rovemen ts of existing prod ucts such as radiators,
alternators,and fuel pum ps
3. Semi-new p rod ucts; these are in fact minor imp rovemen ts
in performan ce
of existing items; several such improvements come along between
Jikigata's
The bulk of the visit focussed on the Jikigata for a new
alternator .
The Jikigata Process
Jikigata efforts are d irected at prod ucts wh ich are m
ainstays of the comp any,
feed a mass prod uction requirement for a pop ular car, and face
importantcompetition, thus requ iring strong innovation. On top of
this, such prod ucts
require timely and reliable delivery. These requirements have
forced the
creation of new d esign staff organ izations and close involvem
ent of top
man agement. While CAD and CAE have played imp ortant sup
porting roles,
the most imp ortant element of such developm ents is creation of
new
man ufacturing m ethod s to sup port the "smar t" flexible
design. This has
meant m aking prod uction engineering an equal partner in the
design process.
-
7/31/2019 Nip Dens
5/13
5
N ippon d enso , like many Japanese comp anies, maintains Prod
uction
Engineering as a corp orate level activity with a Director (equ
ivalent to
Executive VP) as its head . Thu s the comp any w as long prep
ared for the
required organizational changes.
It is imp ortant to realize that th is is a more soph isticated
activity than mere"d esign for man ufacture" or "design for
assembly." A new level of
autom ation/ flexibility is being sought, and it cannot be
achieved u nless new
man ufacturing method s are created, method s which are enabled,
not just
eased, by the prod uct design itself.
A Jikigata effort combines corp orate prod uction engineering
and a pr odu ct
d ivision's capabilities as follows:
Corporate Prod uction Engineering Product Group
System Section Planning CenterProcessing Section Product
Engineer
Materials Section Manufactu ring Department
Machinery and Tools Department Quality Assurance
Produ ct d evelopm ent begins after a laun ch d ecision by the N
ew Produ ct
Developm ent Council, which app oints a prod uct developm ent
team (4 - 5
engineers) and a pr ocess d evelopm ent team (2 - 3 engineers).
These teams
work together to create the concept design sp ecs. Each then sp
lits into separate
activities, enlarges to about 20 members each, and comes u p w
ith an action
plan to m eet the spec. Once the plan is app roved it is cond
ensed to a single
sheet of pap er and given to everyon e. These 40 - 50 engineers
stay w ith the
pr od uct u ntil the end of the project, later being joined by
abou t 100
man ufacturing equipm ent d esigners. The m ost specialized one
third of the
machines (by cost) are mad e in-house, while the more ord inary
ones are bu ilt
by contractors.
The plan (Exhibit 2) mu st be challenging bu t reasonab le. It
mu st contain the
total view an d p lenty of detail. It involves top man agement,
wh o attend
mon thly follow-up meetings. Each goal has a responsible person
an d a list of
risk-managem ent actions. Each goal is classified as to its
impor tance to the
pr oject an d its level of risk. The imp ortance levels range
from "M" (for mu st
hav e) to "W1" (wan t very m uch) to "W2" (wan t, but n ot so mu
ch). Risk
varies from "A" (feasible tod ay) to "B" (curren tly being stud
ied for ap plication
to ma ss prod uction) to "C" (und er basic examination, not ou t
of the lab yet).
At each p oint in th e schedu le there is a "T" (target) date
after w hich, if a risky
process or design element h as not been achieved, one of the p
rearranged
alternates will automa tically be substituted .
-
7/31/2019 Nip Dens
6/13
6
On top of all this, Nip pon den so aimed a t redu cing the
developm ent time
from the customary 6 years to 4, by overlapp ing prod uct and
process
d evelopm ent activities. For th e Type III alternator the d
evelopment time
app arently was 5 years.
Along with th is elaborate planning pr ocess, N ippon den so has
some "usefultools." These comp rise the usu al CAD/ CAM/ CAE
software, plus value
engineering, group technology, and variation redu ction, plu s N
ippon den so's
own design for assembly evaluation method , a variety of system
engineering
aids like discrete event simu lation and p rocess FMEA, and q ua
lity
man agement m ethods (design reviews, QC techniqu es, and the
Taguchi
meth od). Calling th ese "useful tools" reveals N ippon den so's
priorities: get
the m ethodology in p lace first, then sup port it with
tools.
All of the d ebates and trad eoffs involved in these efforts are
carried ou t by
experienced p eople. When there is a major pr oblem a top execut
ive decides.
Design is vulnera ble to change, often forced by th e actions of
a comp etitor. Inalternators and air cond itioners, wh ere Nippon
den so dominates,
comp etitors' actions are less disru ptive of the design schedu
le, bu t in brake
systems where Nipp ond enso does not dom inate, the sched ule is
more
vu lnerable. The availability of top m anagem ent and their w
illingn ess to take
the resp onsibility and mak e d ecisions qu ickly is cru cial.
In th is sense,
N ippon denso is like Nissan and other comp anies who organize
to absorb
change du ring the d esign p rocess rather than tr y to resist
it.
N ote, too, that Nipp ond enso is willing to u se the overlapp
ing tasks method
even on pr ojects w ith lots of technical risk. Overlapp ing
bring s the risk of
more change, but N ippond enso and Nissan both feel that changes
forced byout side pr essures su ch as comp etitors' actions are mor
e severe. This fact
slightly counters Prof Kimura's feeling that only "understood"
processes and
prod ucts could be ap proached th is way. Mr Fukaya w as quite
clear on this
point, and said that Concurrent Engineering (joint operation of
produ ct and
process design teams with m onthly follow-up by top m anagement)
was the
w ay to accomp lish it. They all agree that it is based on hu ma
n
commu nication and experience, and w ish for comp uterized
versions of CE. I
did not hear them su ggest any ways to create them.
N ippon denso's prod uction engineering people are also sympath
etic to the
idea that comp uter aids w ill help this pr ocess and fervently
wish for suchhelp, but th ey do not see it becoming available soon
and do n ot think it w ill
be a dom inant featur e of their success. Yet they are d
eveloping several
effective compu ter tools and see w here other s might be introd
uced . See below
for a summ ary of these.
-
7/31/2019 Nip Dens
7/13
7
Develop men t of the Type III Alternator
The main compon ents of an alternator are the stator, the rotor,
the tw o-piece
cast outer case, and the rectifier assembly. The goals of the
redesign w ere to
prod uce an alternator that could be mad e in several lengths
and diameters on
the same fabrication and assembly equipm ent. Imp ortant changes
in thed esign of all four comp onent s were requ ired. Some w ere
relatively easy, such
as cutting d ifferent d iameter grooves on d ifferent size
cases. Redesign to
per mit assem bly from one d irection w as also not too
difficult to achieve.
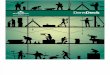
Others requ ired considerable innovation, such as making d
ifferent d iameter
stators. This was d one by coiling stator laminations stamp ed
from long strips
of steel (Exhibit 3) rather th an stam ping rings from steel
sheets and stacking
them up . (The amou nt of scrap ma terial is also drastically
cut this w ay.) The
w ire wind ings for the stator are formed sep arately from th e
stator itself and
pu shed rad ially outward into the grooves in the stator rather
than being
w ound in place in the stators. Changing the d iameter of the w
indings is easier
this way. Most of the size changes can be mad e almost w ithout
stop ping th emanufacturing equipment.
-
7/31/2019 Nip Dens
8/13
8
Cont inuous Measurement
of Mat erial Thickness
Cont inuous
Exhibit 3. High Speed Coiling of Stator Cores in Three Diamat
ers and Several
Stack Heights
Altogether 74 new m anu facturing technologies were d eveloped .
This p roject
occurred in the early 1980's.
The resulting d esign comes in th ree main sizes w ith
capacities ranging from
35 to 80 amp s. Within each size there ar e abou t 250
variations.
These alternators are assembled on autom ated assembly lines
that use m ostly
specialized au tomation for the assembly m oves themselves plus
robots to
feed th e par ts from trays to the assemb ly stations. A few
simple fixture
changes, accomp lished m anually, sup port changes in pr odu ct
model.N ipp ond enso bu ilt these lines in 1987 after seeing a film
in 1980 mad e in 1977
by our grou p at Drap er dem onstrating complete robot assembly
of Ford
alternators.
The spirit of these innovations can also be seen in the w ay N
ippon den so
redesigned r adiators a few years earlier. [Ohta an d H anai] A
major feature w as
ma chines that could switch sizes of compon ents in a few
seconds, plu s a snap -
-
7/31/2019 Nip Dens
9/13
9
together assembly method that eliminated the n eed for fixtures
in the
d ifferent sizes. The cost of the fixtu res wa s saved bu t mor
e imp ortant ly the
time requ ired to sw itch from on e size set of fixtures to
anoth er was
eliminated . Some of these techniques w ere pioneered by General
Motors
H arrison Radiator Division bu t not pu t in place as comp
letely as at
Nippondenso .
Radiators and alternators are clear examp les of "smar t pr odu
cts," being
d esigned so that the challenging man ufacturing strategy of
conqu ering variety
could be achieved w ithout basic advan ces in man ufacturing kn
owledge.
Innovative manu facturing methods w ere ind eed mad e, however.
Deciding
how to partition the p roblem into prod uct innovation and
process
innovation clearly required a single team w orking together from
the start of
the p roject. Success would have been u nlikely if pr ocess
engineers had
merely critiqued the prod uct engineers' design, and w ould h
ave been
impossible if the process equipm ent had been merely pu rchased
from
vendors after produ ct design w as comp lete.
Use of Compu ters in the D esign Process
Nipp ondenso has a large CAD/ CAM/ CAE activity, combining their
own
softw are developm ent and use of comm ercial softwar e. The
system they hav e
d eveloped is similar to several comm ercially available "framew
orks" in th e
sense that it sup ports m any ap plication program s as long as
they respect
certain data conversion p rotocols, but there is no true comm on
d ata base. In
ad dition to this core system, there is the typical array of CAE
plus a ran ge of
software that sup ports prod uction prep aration and prod uction
control.
The goals of CAD/ CAM/ CAE are stated as
imp roving the efficiency of prod uct d evelopm ent
shortening the lead time for new prod ucts
making it easier to design prod uct variants
helping create smaller an d lighter p rodu cts
(Note that N issan denied th at a goal of its CAD w as to
shorten the lead
time...) Design is sup ported by NA DAMS ( Nip pon d enso Ad
vanced Design
and Manufacturing System), wh ich has been u nd er continuous
development
since 1980. It is wr itten in PL-1 with recent ad d itions in C.
Outsid e cont ractorsw rote most of it und er the leadership of an
internal group of program mers. It
ru ns on IBM 3090's and su pp orts about 1000 term inals. N
ADAMS sup por ts
2D and 3D wireframe m odels, surface freeform shap es using
Coons su rfaces
and rational B-splines, and solid models.
All items d esigned in N ADAMS are in one d atabase accessible
to the
designers, including th ose who d esign p rodu ction equipment.
Casting and
-
7/31/2019 Nip Dens
10/13
1 0
molding d ies, NC machine operations, robot program ming,
operating mod els
of parts and prod ucts, and simu lations are examp le
applications sup ported.
There is an expert system to help d evise cutting process plans,
typical CAE for
vibration, stress and th ermal analyses, mold flow simulations
to aid d ie
d esign, and some fault tolerance analysis software that w as
not explained
further.
For examp le, the mold flow p rogram (IMAP, developed by Toyota
Central
R&D Laboratories, Inc.) helped N ipp ond enso red uce the w
eight of its air
conditioner case and avoid h aving a hole develop d uring m
olding. The
nu mber of actual prototyp es needed w as redu ced by 66%.
The metal cutting expert system is based on Metcut's data plu s
650 rules
provid ed by N ippond enso's process engineers. The rules comp
rise knowledge
abou t how to process certain geometries plu s form ulas for
calculating
feed rates and tool wear, for exam ple. The software chooses
tool material and
size, cut dep th, feedrate, cutting speed, an d cutter rotation
rate. In a side-by-side test, process engineers pr ovided process
plans for a p recision su rface that
varied by 4 to 1 in recomm ended cutting speed . Only one
engineer
recommen ded a cutting sp eed as high as the expert system did.
This cutting
speed was verified in a test. The system th us h as the
capability to solve three
pr oblems: lack of experienced p rocess plan ners, non-u
niformity of their
plan s, and un w illingness of plan ners to choose aggressive
plans, thu s costing
time and m oney un necessarily.
Tou r of CAE Facility
The facility I toured was a training center. It contains a w ide
var iety ofw orkstations bu t m ostly IBM 5080's. I saw tw o d emon
strations: robot offline
programming and supercompu ter output showing FEM studies.
Robot offline program ming is sup ported by a w ireframe 3D
modeler that
perm its a user to build u p a mod el of a w orkstation from
basic shapes. A
primar y function of the program is to predict and im prove th e
cycle time of
the robot workstation. The comp uter already has m odels of Nip
pon denso's
various robots (which it makes in-hou se). I could not find ou t
how the
coordinate d ata were pu t in so that workp ieces, fixtures, and
teach p oints for
the robot could be described. Collision avoidance is done by
trial and error,
u sing the mod eler's intersection cap ability. Straight line
pat hs are comp utedau tomat ically as a first try an d th e user m
odifies them to avoid obstacles or
imp rove cycle time.
Several FEM examp les were av ailable. These includ e fluid flow
in p lastic
injection mold ing, turbu lent mixing an d heat tran sfer inside
the air
conditioner betw een cold an d h ot air, stress-strain, and flow
inside a fuel
-
7/31/2019 Nip Dens
11/13
1 1
man ifold. NADAMS supp orts pre-and post-processing, and a
commercial
FEM pa ckage does the calculations on the m ainfram e.
Developments in Assembly Techn ology
Two interesting activities of the Assembly R&D grou p w ere
presented by MrHarad a and Mr Sugito: Design for Assembly, and
Assembly Technology. The
Assembly R&D grou p h as only 5 mem bers and was begun in
1985. Its jobs
includ e interacting with the research commu nity at home and
overseas,
developing ways to simp lify produ cts using their own DFA
methodology, and
d eveloping ways to assemble difficult p rod ucts that can't be
simplified.
Assembly Technology is divid ed into tw o para llel efforts:
dexterous/ intricate
assembly an d large variation assem bly of simp le items.
(Exhibit 4)
Engineering inn ovation is used on the first kind w hile
economic app roaches
are u sed on the second because th ey are already technically
easy but too costly
to automate.
For large variation p rod ucts, an econom ic analysis showed
that cost of
prep aring and feeding parts grow s mu ch faster than other
costs as the nu mber
of variations grow s. Efforts are going into var ious "low cost"
feeding an d
prep aration method s, includ ing an attempt at low cost bin
picking. Bin
picking is being u sed in only one factory app lication,
however. Other
app lications are u nd er d evelopm ent. Reconfigurable grippers
and pallets are
also und er consideration, along w ith such app roaches as
molding grou ps of
parts on to one backbone and cutting th em off at the moment of
assembly.
For technologically challenging assembly tasks, such as fitting
un wieldy ,flexible, and warp ed items together, Nipp ondenso long
ago conclud ed that
"intelligent, dexterous, and ad apt able" robots were too expen
sive or
un available. Instead, th ey d ecided to "utilize the char
acteristics of the
pr odu ct" as well as to redesign the p rodu ct so that assembly
could be
accomp lished. This is another example of the "smart prod uct"
app roach.
A fine example show n w as fitting top an d bottom halves of
molded p lastic air
conditioner h ousings togeth er. (Exhibit 5) These fit by tongu
e and groove
arou nd a large perim eter ("island "). Since the cases war p,
the ha lves cann ot
just be push ed together . Fixtu ring cou ld be used to force
the halves in to th e
correct shape but that w ould require costly fixtures and/ or
making the partstoo flimsy.
The problem gets w orse wh en the joint has a gap ("discontinu
ity") or two
rather th an covering the entire perimeter. The w orst situation
occurs w hen
there are "intermediate parts" such as pivoted d amp er doors w
here one end
of the hinge pin fits in a hole in one case half and the other
en d fits in a hole
-
7/31/2019 Nip Dens
12/13
1 2
in the other h alf. Such d oors are placed up right in the lower
h alf but flop
over to one side and the hinge pin w ill not line up with th e
up per h alf's hole.
People cur rently assemble these par ts. They pu sh and bang th
e case halves
together, reaching inside to line u p th e dam per h inge pins
and the case holes.
It is an obvious bottleneck on the p rod uction line an d
inherently difficult toautomate.
The robot solutions have been dem onstrated in the lab but not
app lied in the
factory. They are elegant and involve a mix of robot angu lar
man euvering of
the top p art, redesign of tongue and groove shapes, and
redesign of dam per
d oors. This is the app roach I called "smart p rod uct"
above.
To fit a tongu e-groove that covers the ent ire perim eter, the
robot tilts the top
half and m ates the parts on one side. It then p ivots the top h
alf dow n gently
by hinging at the initial contact point, and the tongu e rolls
into the groove.
When th e joint has a gap, the above method is used, starting at
a p ivot point
opp osite the gap and rolling around so that the parts are mated
at one end of
the gap . A vision system is then u sed to find the top in
relation to the bottom
at the other end of the gap, and the robot pushes and slightly d
eforms the top
half until the parts are aligned. Then the pivot-roll method is
used to m ate
the parts w hile not d isturbing the m ate achieved at the first
end of the gap.
When there ar e several gap s, the one in the m ost flexible
region of the case is
ma ted first, then the n ext most flexible, and so on.
When there is one dam per d oor, the robot pushes it upright
with the top half
of the case and catches the d oor hing e in the hole in the
case. Then it repeatsthe tongu e-groove method . The hinge pins on
the dam per are mad e extra
long so that they do not fall out du ring the pivoting
operation. When there
are several doors, this process is repeated for each door, and
the hinge p in of
each d oor is designed to be longer than that of the next d oor
so that the
sequence of door m ates can be controlled.
Whether this scheme can be app lied reliably and at high enough
speed in the
factory is unclear at this time but given N ipp ond enso's past
record, it will be.
It is a pretty sop histicated app roach and represents "design
for assembly" as
high art.
Nipp ondenso has also developed its own DFA evaluation
method.
Nipp ond enso s method is broader and more sophisticated than
typical DFA
method ologies, wh ich m ost people agree focus too m uch on
small parts. It
contains 65 points of evaluation, such as how parts m ust be p
repared for
feeding, how m any variations there are in p arts and p rodu ct,
whether a p art's
feeding m ethod sup ports variety, how difficult the assembly
technique mu st
-
7/31/2019 Nip Dens
13/13
1 3
be, and how man y parts there are (the most imp ortant item).
Produ ction
engineers perform th e evaluations and give advice to the prod
uct designers.
An in teresting red esign activity is called Variation Redu
ction. Its aim is to
red uce the effect of multiple mod els on the assembly
processes. Method s used
includ e mod ularizing the prod uct into fixed p ortions and
variable portions,supp ressing minor variations and using more
common parts instead, and
using the FMS-1 technique. This top ic is a su bject of ongoing
research an d Mr
H arada is gathering more examples from arou nd the comp
any.
Twice a year they h old a DFA seminar to tra de stories, hear
adv ice from both
prod uct engineers and p rocess engineers, and teach the method.
Mr H arada's
goal is to create a DFA progra m based on a solid m odeler that
w ill help
prod uct d esigners evaluate their own designs. Other comp anies
I have asked
about su ch an app roach (a subject of my own research) say that
they do n ot
believe prod uct designers will ever have the time or kn owledge
to d o such
evaluations themselves. Mr H arada will move to N ippond enso
TechnicalCenter USA, Inc. near Detroit and w ill survey r esearch
opp ortun ities from
there.
Prof Kimu ra noted later that both Boothroyd/ Dewhu rst and
Draper
Laboratory research on d esign for assembly and simplification
of prod ucts
have had a strong influence in Japan . The B/ D method is very
pop ular
although its limitations are recognized.
Reference
[Nevins and Whitney] J L Nevins and D E Whitney, eds, Concurrent
Designof Products and Processes, New York: McGraw-Hill, 1989, pp
54-58.
[Ohta and Hanai] K. Ohta and M. Han ai, "Flexible Autom ated
Prod uction
System for Automotive Radiators," 1st Japan-USA Symposium on
Flexible
Au tom at ion , Osaka, Japan , 1986, Kyoto: Japan Assoc of Autom
atic Control
Engineer s, pp 553-558.