Embed Size (px)
Citation preview

SymmetrizationNiloy J. Mitra Leonidas J. Guibas Mark Pauly
TU Vienna Stanford University ETH Zurich
SIGGRAPH 2007
2
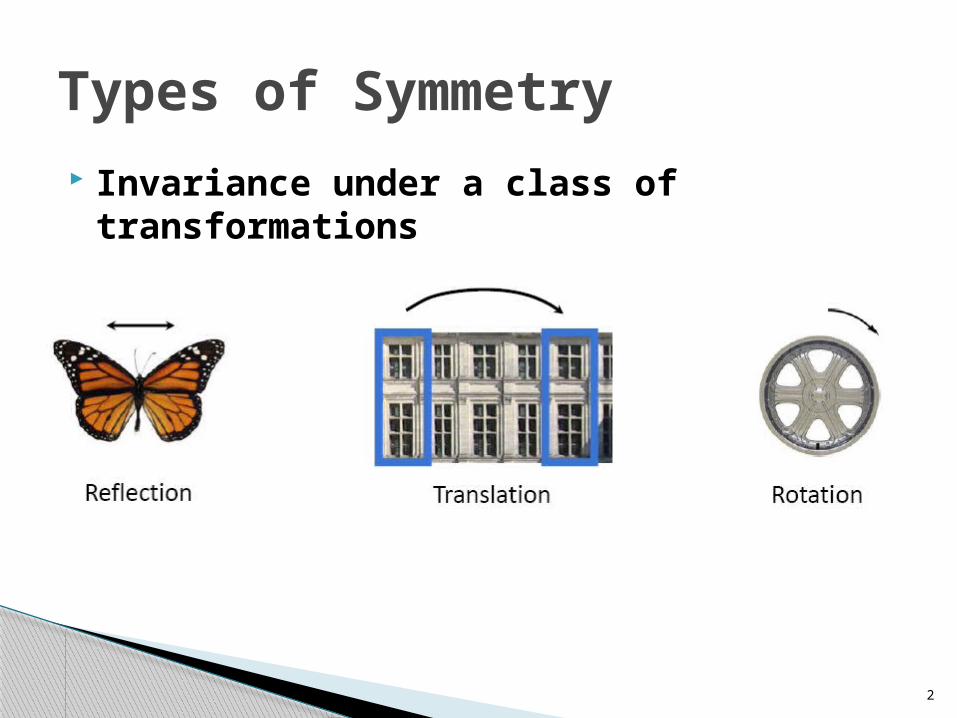
Invariance under a class of transforma-tions
Types of Symmetry
3
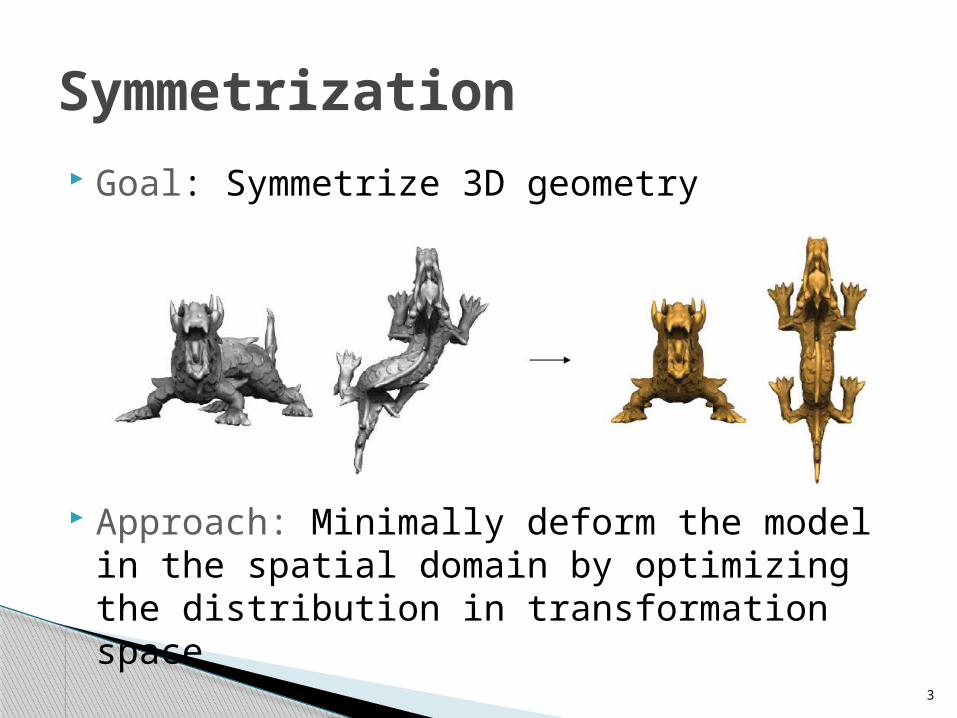
Goal: Symmetrize 3D geometry
Approach: Minimally deform the model in the spatial domain by optimizing the distri-bution in transformation space
Symmetrization

4
Given an explicit point‐pairing, a closed form solution for symmetrizing the point set
A symmetrization algorithm that uses trans-form domain reasoning to guide shape de-formation in object domain
Applications:◦ Extend the types of detected symmetries◦ Symmetric remeshing◦ Automatic correspondence for articulated bodies
Contributions
5
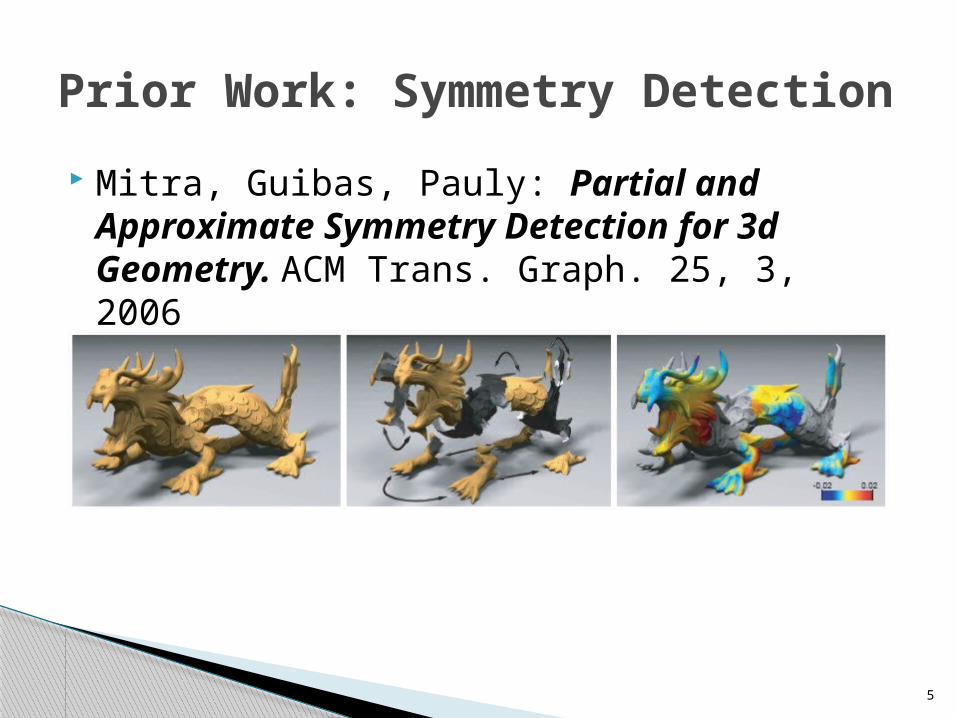
Mitra, Guibas, Pauly: Partial and Approx-imate Symmetry Detection for 3d Ge-ometry. ACM Trans. Graph. 25, 3, 2006
Prior Work: Symmetry Detec-tion

6
Initial pairs are sampled randomly Pruning based on curvature and normal
Prior Work: Pair pruning

7
Use mean-shift algorithm◦ Non-Parametric Density Estimation
Prior Work: Clustering
Tessellate the space with windows
Run the procedure in parallel
The blue data points were traversed by the windows towards the mode
8
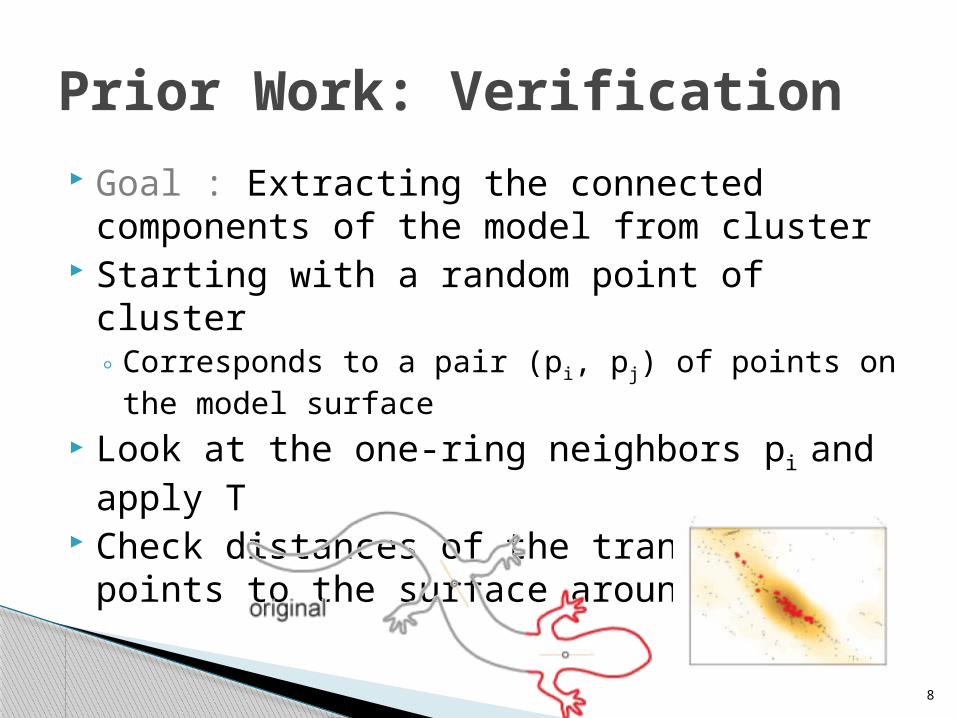
Goal : Extracting the connected compo-nents of the model from cluster
Starting with a random point of cluster◦ Corresponds to a pair (pi, pj) of points on the
model surface Look at the one-ring neighbors pi and apply
T Check distances of the transformed points
to the surface around pj
Prior Work: Verification
9
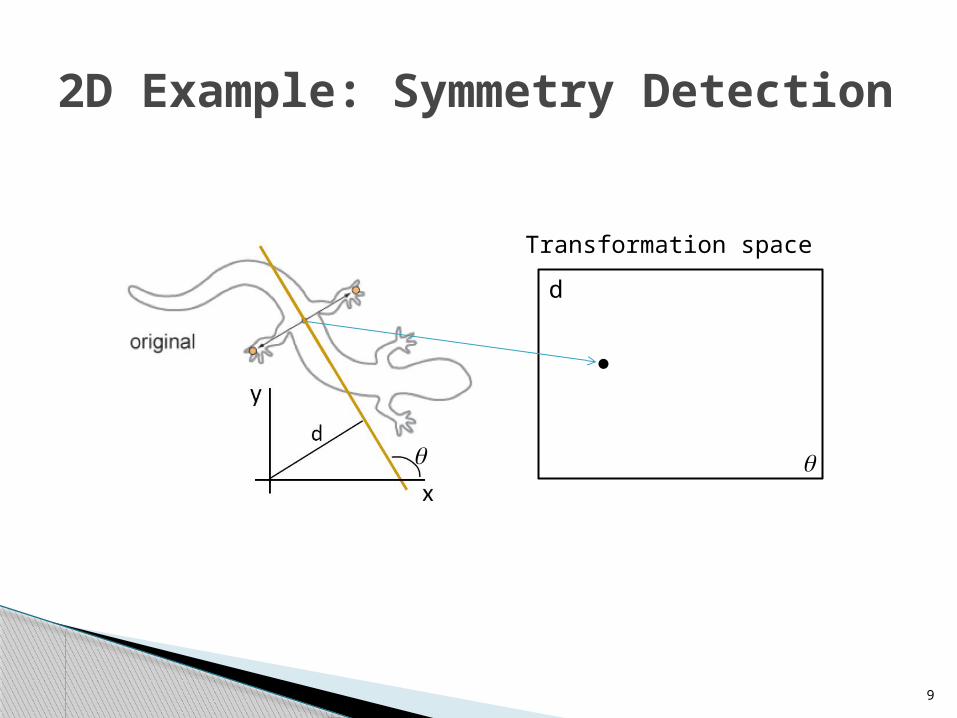
2D Example: Symmetry Detec-tion
Transformation space
d

10
2D Example: Another point‐pair votes

11
Pairs of sample points define reflective symmetry transform
2D Example: Voting Con-tinues

12
Density plot → accumulation of symmetry evidence
2D Example: Density Plot

13
Density cluster → reflective symmetry
2D Example: Density Peaks

14
2D Example: Symmetry Detec-tion

15
2D Example: Symmetry Detec-tion
A set of potential corresponding point pairs extracted

16
2D Example: Local Symmetriza-tion

17
2D Example: Local Symmetriza-tion
Cluster contraction
Local symmetrization
Cluster contraction in transform space
Constrained deformation in object space
18
Object space point pairs → points in transform space
Cluster in transform space corresponds to approximate symmetry
Cluster contraction in transform space corresponds to constrained in deforma-tion in object space that enhances object symmetry
Recap
19
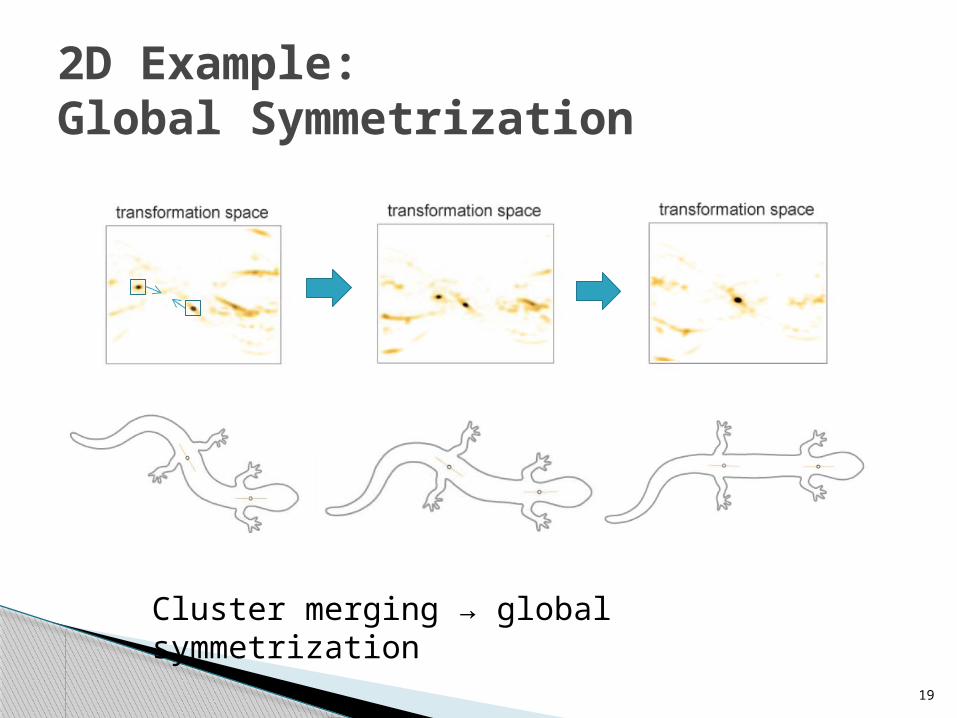
2D Example: Global Symmetrization
Cluster merging → global symmetrization

20
2D Example: Global Symmetrization
Cluster merging/contraction → Global symmetrization
21
Local Symmetrization◦ Cluster contraction How to deform in the spatial domain ? Where to move in transform space ?
Global Symmetrization◦ Cluster merging
Sub‐problems

22
Goal: Minimally displace two points to make them symmetric with respect to a given transformation
Optimal Displacements
[Zabrodsky et al. 1997]
2
)('
2
)(' 1 qpd
pqd
Tand
Tqp

23
Goal: Find optimal transformation and minimal displacements for a set of point‐pairs
Optimal Transformation
24
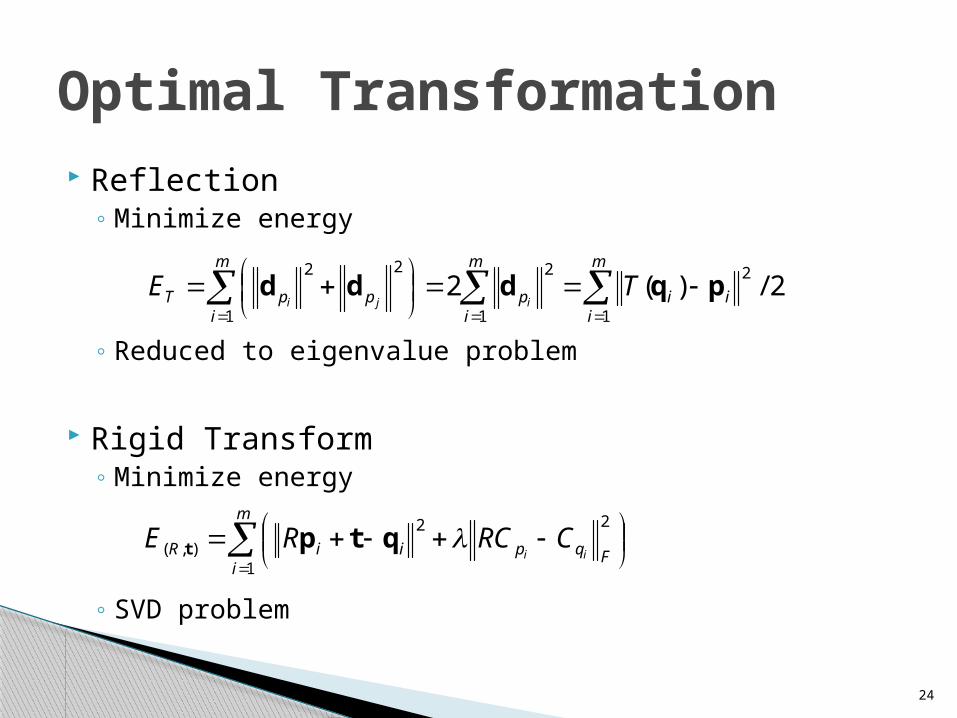
Reflection◦ Minimize energy
◦ Reduced to eigenvalue problem
Rigid Transform◦ Minimize energy
◦ SVD problem
Optimal Transformation
2/)(21
2
1
2
1
22
m
iii
m
ip
m
ippT TE
ijipqddd
m
iFqpiiR ii
CRCRE1
22
),( qtpt

25
Initial random sampling does not respect symmetries.
The correspondences estimated during the symmetry detection stage are potentially inaccurate and incomplete
Optimization

26
Every sample p shifted in the direction of displacement dp (white circle)
Project them onto the surface (colored square)
The procedure is iterated until the variance of the cluster is no longer reduced.
Optimizing Sample Posi-tions

27
Local Symmetrization◦ Cluster contraction Where to move in transform space ? How to deform in the spatial domain ? Optimal transformation
Global Symmetrization◦ Cluster merging
Sub‐problems

28
Using existing shape deformation method◦ Symmetrizing displacements positional constraints◦ 2D : As-rigid-as-possible shape manipulation method[Igarashi
et al.2005]◦ 3D : Non-linear PriMo deformation model [Botsch et al. 2006]
Symmetrizing Deformation
As-Rigid-As-Possible Shape Manipulation[Igarashi 2005] PriMo: Coupled Prisms for Intuitive Surface Modeling
[Botsch 2006]

29
Find sample pairs Optimize sample positions on surface Compute the optimal transformation Update pi : p are used as deformation constraints Re-compute the optimal transformation Find new sample pairs every 5 time step
Contracting Clusters
iii tdpp
30
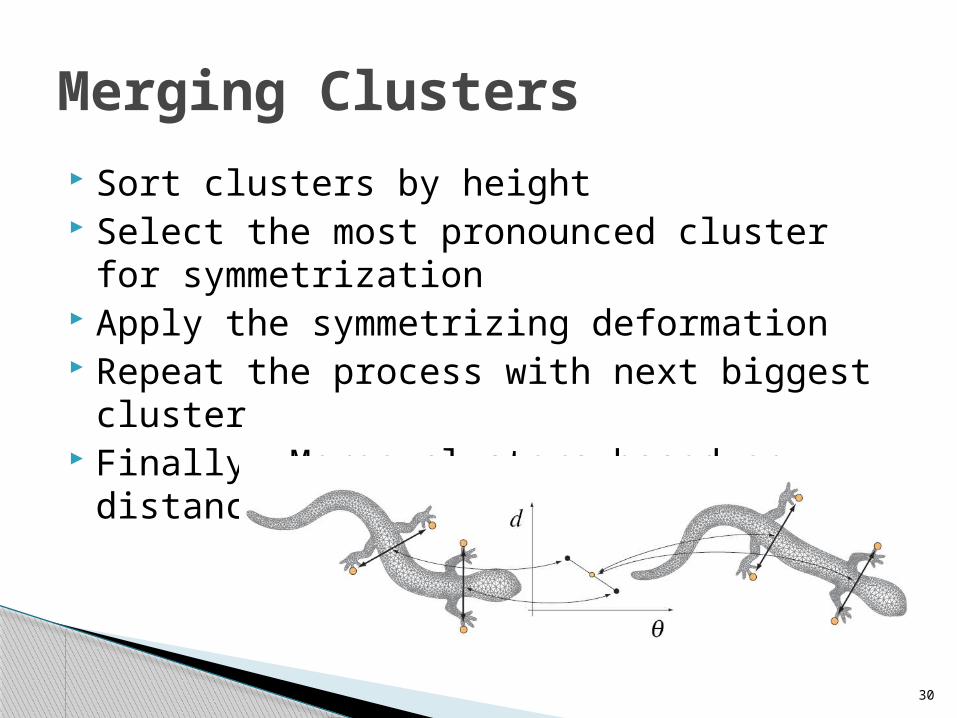
Sort clusters by height Select the most pronounced cluster for
symmetrization Apply the symmetrizing deformation Repeat the process with next biggest cluster Finally, Merge clusters based on distance
greedily
Merging Clusters
31
User controls the deformation by modifying the stiffness of the shape’s material
Soft materials allow for better symmetriza-tion
Stiffer materials more strongly resist the symmetrizing deformation
System allow spatially varying stiffness User controls the symmetrization by inter-
actively selecting clusters for contraction or merging
Control

32
Results

33
Results

34
Results - Symmetric Mesh-ing
Symmetry Based Remeshing [Podolak al SGP 2007]
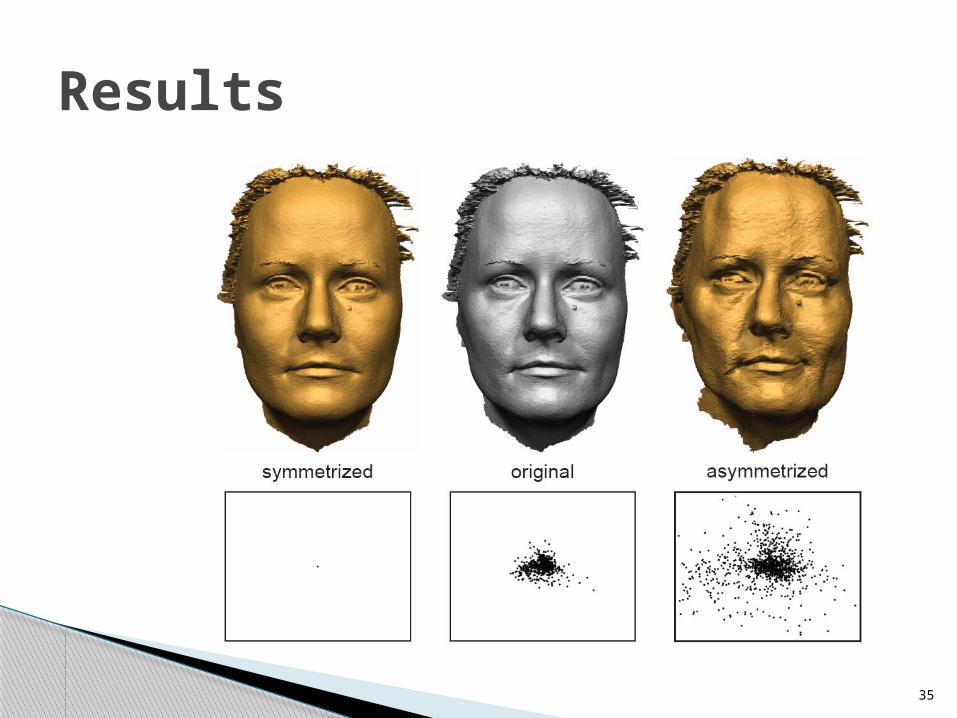
35
Results
36
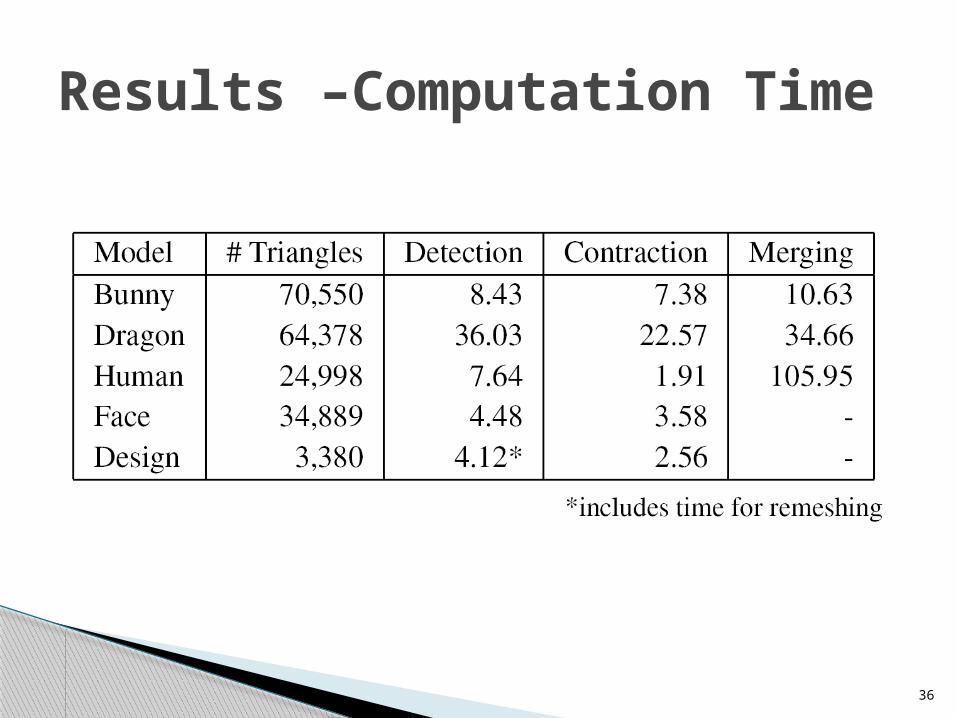
Results –Computation Time

37
Results- Articulated Bodies

38
Some case, method is fails to process the entire model◦ The front feet of the bunny and the right foot of
the male character Small-scale features are sometimes ignored Insufficient local matching
The deformation model does not respect the semantics of the shape.
Limitations
39
Symmetrization algorithm◦ Robust and efficient, requires minimal user inter-
vention ◦ Handle both local and global symmetries
Future Work◦ Symmetry respecting geometry processing◦ Hierarchical shape semantics◦ Perception, art, design◦ Other data, e.g. motion data, derived spaces
Conclusion