Embed Size (px)
Citation preview

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Neural NetworksLecture 3:Multi-Layer Perceptron
Farzaneh Abdollahi
Department of Electrical Engineering
Amirkabir University of Technology
Winter 2010
Farzaneh Abdollahi Neural Networks Lecture 3 1/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Linearly Nonseparable Pattern Classification
Delta Learning RuleGeneralized Delta Learning RuleFeedforward Recall and Error Back-Propagation
Multilayer Neural Nets as Universal Approximators
Learning FactorsInitial WeightsErrorTraining versus GeneralizationNecessary Number of Patterns for Training setNecessary Number of Hidden NeuronsLearning ConstantSteepness of Activation Function
Adaptive MLPA Pruning Method
Farzaneh Abdollahi Neural Networks Lecture 3 2/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Linearly Nonseparable Pattern Classification
I A single layer network can find a linear discriminant function.
I Nonlinear discriminant functions for linearly nonseparable function canbe considered as piecewise linear function
I The piecewise linear discriminant function can be implemented by amultilayer network
I The pattern sets †1 and †2 are linearly nonseparable, if no weightvector w exists s.t
yTw > 0 for eachy ∈ †1yTw < 0 for eachy ∈ †2
Farzaneh Abdollahi Neural Networks Lecture 3 3/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
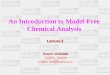
Example XORI XOR is nonseparable
x1 x2 Output
1 1 11 0 -10 1 -10 0 1
I At least two line are required to separate them
I By choosing proper values of weights, thedecision lines are
−2x1 + x2 −1
2= 0
x1 − x2 −1
2= 0
I output of the first layer network:o1 = sgn(−2x1 + x2 −
1
2) o2 = sgn(x1 − x2 −
1
2)
Farzaneh Abdollahi Neural Networks Lecture 3 4/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Farzaneh Abdollahi Neural Networks Lecture 3 5/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I The main idea of solving linearly nonseparable patterns is:I the set of linearly nonseparable pattern is mapped into the image space
where is becomes linearly separable.I This can be done by proper selecting weights of the first layer(s)I Then in the next layer they can be easily classified
I Increasing # of neurons in the middle layer increases # of lines.I ∴ provides nonlinear and more complicated discriminant functions
I The pattern parameters and center of clusters are not always known apriori
I ∴ A stepwise supervised learning algorithm is required to calculate theweights
Farzaneh Abdollahi Neural Networks Lecture 3 6/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Delta Learning Rule for Feedforward Multilayer Perceptron
I The training algorithm is called error back propagation trainingalgorithm
I If a submitted pattern provides an output far from desired value, theweights and thresholds are adjusted s.t. the current mean squareclassification error is reduced.
I The training is continued/repeated for all patterns until the trainingset provide an acceptable overall error.
I Usually the mapping error is computed over the full training set.
I The trained network operates feedforward
I The weight adjustment propagate backward from output layer throughhidden layer toward input layer.
Farzaneh Abdollahi Neural Networks Lecture 3 7/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I Input: yj , j = 1, 2, ..., J, Output:ok , k = 1, ...,R and weights between outputof the jth neuron and input of the kthneuron: wkj
o = Γ[Wy ]
where y = [y1, y2, ...yj ]T ,
o = [o1, o2, ... ok ]T ,
W =
w11 w12 . . . w1j
w21 w22 . . . w2j
...... . . .
...wk1 wk2 . . . wkj
Γ[.] =
f (.) 0 . . . 0
0 f (.) . . . 0...
... . . ....
0 0 . . . f (.)
I Desired output vector d = [d1, d2, ..., dk ]T
Farzaneh Abdollahi Neural Networks Lecture 3 8/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I The activation vector is netk = Wy
I The error is defined for a single perceptron is generalized to include allsquared error at the outputs k = 1, ...,K
Ep =1
2ΣK
k=1(dpk − opk)2 =1
2‖dp − op‖2
p = 1, ...,P is pth pattern
I Bias is the jth weight corresponding to jth input yj = −1
I Recall the learning rule of continuous perceptron (it is so-called deltalearning rule)
∆wkj = −η ∂E
∂wkj
p is skipped for brevity.
I for each neuron in layer k:
netk =J∑
j=1
wkjyj (1)
ok = f (netk)
Farzaneh Abdollahi Neural Networks Lecture 3 9/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I ∂E∂wkj
depends only on netk
I Using chain rule:
∂E
∂wkj=
∂E
∂(netk)
∂(netk)
∂wkj
I Using (1) yields:
∂E
∂(netk)= yj
I Define the error signal term δok = − ∂E∂(netk )
I ∴ ∂E∂wkj
= −δokyj
I The weights are updated by (delta training rule):
∆wkj = −ηδokyj for k = 1, ...,K , j = 1, ..., J
Farzaneh Abdollahi Neural Networks Lecture 3 10/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I δok should be found for a specified activation function:
δok = − ∂E
∂ok
∂ok
∂(netk)
where f ′(netk) = ∂ok∂(netk ) , ∂E
∂ok= −(dk − ok)
I ∴ δok = (dk − ok)f ′(netk), k = 1, ...,K
I The weight adjustment for single layer network is
∆wkj = η(dk − ok)f ′(netk)yj for k = 1, ...,K , j = 1, ..., J
w ′kj = wkj + ∆wkj
I Assuming sigmoid activation function, its time derivative is
f ′(net) =
{o(1− o) unipolar : f (net) = 1
1+exp(−λnet)12(1− o2) bipolar : f (net) = 2
1+exp(−λnet) − 1
Farzaneh Abdollahi Neural Networks Lecture 3 11/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
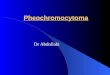
Generalized Delta Learning Rule
I Delta learning rule is a supervised rulewhich adjusts the weights based onerror between neuron output anddesired output
I In multiple layer networks, the desiredoutput of internal layer is notavailable.
I ∴ Delta learning rule cannot beapplied directly
I Assuming input as a layer with identityactivation function, the network shownin fig is a three layer network (sometimes it is called a two layer network)
I Since output of jth layer is notaccessible it is called hidden layer
Farzaneh Abdollahi Neural Networks Lecture 3 12/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I The weights of output layer w can be updated based in delta rule,since desired output is available for them
I For updating the hidden layer weights:
∆vji = −η ∂E
∂vji
∂E
∂vji=
∂E
∂neti
∂netj∂vji
, i = 1, ..., n j = 1, ...n
I∂netj∂vji
= xi which are input of this layer
I Based on delta learning rule, the hidden layer weights are updated by∆vji = −ηδyjxi
I where δyj = − ∂E∂(netj )
for j = 1, ..., J is signal error of hidden layer
Farzaneh Abdollahi Neural Networks Lecture 3 13/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I Despite of the output layer where netk affected the kth neuron outputonly, netj contributes to every K terms of error E = 1
2
∑Rk=1(dk − ok)2
δyj = −∂E
∂yj.∂yj
∂netj∂yj
∂netj= f ′(netj)
∂E
∂yj= −
R∑k=1
(dk − ok)f ′(netk)∂netk∂yj
= −R∑
k=1
δokwkj
I ∴ The updating rule is
∆vji = −ηf ′(netj)xi
R∑k=1
δokwkj (2)
Farzaneh Abdollahi Neural Networks Lecture 3 14/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I So the generalized delta rule is:
∆v = −ηδx (3)
where η is learning const., δ is layer error, and x is layer input.
I The weights of jth layer is proportional to the weighted sum of all δ ofnext layer.
I Delta training rule of output layer and generalized delta learning rulefor hidden layer have fairly uniform formula.
I ButI δo = (dk − ok)ok(1− ok) contains scalar entries, contains error between
desired and actual output times derivative of activation functionI δy = wjδo f
′y contains the weighted sum of contributing error signal δoproduced by the following layer
I The generalized learning rule propagates the error back by one layer
Farzaneh Abdollahi Neural Networks Lecture 3 15/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Feedforward Recall and Error Back-Propagation
I The Multilayer Perceptron (MLP) is performed in two phases
1. Feedforward recall2. Back-Propagation Training
I Feedforward recallI Give training pattern vector z , result of this phase is computing the
output vector o (for two layer network)
o = Γ[W Γ[Vz ]]
where the internal mapping is Γ[Vz ] = y (relates to hidden layer).I Γ is diagonal element activation function.I Since the activation function is assumed to be fixed, weights are the
only parameters should be adjusted by training to map z → o s.t. omatches d
I The weight matrices W and V should be adjusted s.t. ‖d − o‖2 is min.
Farzaneh Abdollahi Neural Networks Lecture 3 16/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Back-Propagation TrainingI Training is started by feedforward recall phase
I single pattern z is submittedI output layers y and o are computed
I The error signal vector is determined in the output layer
I It propagates toward input layer
I Cumulative error is as sum of all continuous output errors in entiretraining set is calculated
I The weights should be updated from output layer to hidden layerI Layer error δ of output and then hidden layer is computedI The weights are adjusted accordingly
I After all training patterns are applied, the learning procedure stopswhen the final error is below the upper bound Emax
I In fig next page, the shaded path refers to feedforward path and blankpath is Back-Propagation (BP) mode
Farzaneh Abdollahi Neural Networks Lecture 3 17/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Farzaneh Abdollahi Neural Networks Lecture 3 18/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Error Back-Propagation Training AlgorithmI Given P training pairs {z1, d1, z2, d2, ..., zp, dp} where zi is
(I × 1), di is (K × 1), i = 1, ...,PI The I th component of each zi is of value -1 since input vectors are
augmented .
I Size J − 1 of the hidden layer having outputs y is selected.I Jth component of y is -1, since hidden layer have also been augmented.I y is (J × 1) and o is (K × 1)
I In the following, q is training step and p is step counter withintraining cycle.
1. Choose η > 0, Emax > 02. Initialized weights at small random values, W is (K × J), V is (J × I )3. Initialize counters and error: q ←− 1, p ←− 1,E ←− 04. Training cycle begins here. Set z ←− zp, d ←− dp,
yj ← f (v tj z), j = 1, .., J (vj a column vector, jth row of V )
o ← f (w tky), k = 1, ...,K (wk a column vector, kth row of W )(f(net)
is sigmoid function)
Farzaneh Abdollahi Neural Networks Lecture 3 19/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Error Back-Propagation Training Algorithm Cont’d
5. Find error: E ←− 12(d − o)2 + E for k = 1, ...,K
6. Error signal vectors of both layers are computed. δo (output layererror) is K × 1, δy (hidden layer error) is J × 1δok = 1
2(dk − ok)(1− o2k ), for k = 1, ...,K
δyj = 12(1− y2
j )∑K
k=1 δokwkj , for j = 1, ..., J
7. Update weights:I Output wkj ←− wkj + ηδokyj , k = 1, ..,K j = 1, .., JI Hidden layer vji ←− vji + ηδyjzj , jk = 1, .., J i = 1, .., I
8. If p < P then p ←− p + 1, q ←− q + 1, go to step 4, otherwise, go tostep 9.
9. If E < Emax the training is terminated, otherwise E ←− 0, p ←− 1 goto step 4 for new training cycle.
Farzaneh Abdollahi Neural Networks Lecture 3 20/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Multilayer NN as Universal Approximator
I Although classification is an important application of NN, consideringthe output of NN as binary response limits the NN potentials.
I We are considering the performance of NN as universal approximators
I Finding an approximation of a multivariable function h(x) is achievedby a supervised training of an input-output mapping from a set ofexamples
I Learning proceeds as a sequence of iterative weight adjustment until issatisfies min distance criterion from the solution weight vectors w∗.
Farzaneh Abdollahi Neural Networks Lecture 3 21/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
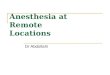
I Assume P samples ofthe function areknown {x1, ..., xp}
I They are distributeduniformly between aand b xi+1 − xi =b−aP , i = 1, ...,P
I h(xi ) determines theheight of therectangularcorresponding to xi
I ∴ a staircaseapproximationH(w , x) of thecontinuous functionh(x) is obtained
Farzaneh Abdollahi Neural Networks Lecture 3 22/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I Implementing the approximator with two TLUs
I If the TLU is replaced by continuous activation functions, the windowis represented as a bump
I Increasing steepness factor λ⇒ approaching bump to the rectangular
I ∴ Considering a hidden layer with proper number of neurons canapproximate nonlinear function h(x)
Farzaneh Abdollahi Neural Networks Lecture 3 23/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Multilayer NN as Universal Approximator
I The universal approximation capability of NN is first time expressed byKolmogorov 1957 by an existence theorem.
I Kolmogorov TheoremAny continuous function f (x1, ..., xn) of several variables defined onI n (n ≥ 2) where I = [0 1], can be represented in the form
f (x) =2n+1∑j=1
χj(n∑
i=1
ψij(xi )
where χj : cont. function of one variable, ψij : cont. monotonicfunction of one variable, independent of f .
Farzaneh Abdollahi Neural Networks Lecture 3 24/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I The Hecht-Nielsen theorem(1987) casts the universal approximationsin the terminology of NN
I Hecht-Nielsen Theorem:Given any continuous function f : I n → Rm, where I is closed unitinterval [0 1] f can be represented exactly by a feedforward neuralnetwork having n input units, 2n + 1 hidden units, and m output units.The activation function jth hidden unit is
zj =n∑
i=1
λiΨ(xi + εj) + j
where λ: real const., Ψ: monotonically increasing functionindependent of f , ε: a pos. const. The activation function for outputunit is
yk =2n+1∑j=1
gkzj
where g is real and continuous depend on f and ε.Farzaneh Abdollahi Neural Networks Lecture 3 25/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I The mentioned theorems just guarantee existence of Ψ and g .
I No more guideline is provided for finding such functions
I Some other theorems have been given some hints on choosingactivation functions (Lee & Kil 1991, Chen 1991, Cybenko 1989)
I Cybenko Theorem Let In denote the n-dimensional unit cube, [0, 1]n.The space of continuous functions on In is denoted by C (In). Let g beany continuous sigmoidal function of the form
g →{
1 as t →∞0 as t → −∞
Then the finite sums of the form
F (x) =N∑
i=1
vig(n∑
j=1
wTij xj + θ)
are dense in C (In). In other words, given any f ∈ C (In) and ε > 0,there is a sum F (x) of the above form for which
|F (x)− f (x)| < ε ∀ x ∈ InFarzaneh Abdollahi Neural Networks Lecture 3 26/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I MLP can provide all the conditions of Cybenko theoremI θ is biasI wij is weights of input layerI vi is output layer weights
I Failures in approximation can be attribute toI Inadequate learningI Inadequate # of hidden neuronsI Lack of deterministic relationship between the input and target output
I If the function to be approximated is not bounded, there is noguarantee for acceptable approximation
Farzaneh Abdollahi Neural Networks Lecture 3 27/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
ExampleI Consider a three
neuron network
I Bipolar activationfunction
I Objective:Estimating a functionwhich computes thelength of input vector
d =√
o21 + o2
2
I o5 = Γ[W Γ[Vo]],o = [−1 o1 o2]
I Inputs o1, o2 arechosen 0 < oi < 0.7for i = 1, 2
Farzaneh Abdollahi Neural Networks Lecture 3 28/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
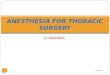
Example Cont’d, Experiment 1
I Using 10 training points which areinformally spread in lower half of firstplane
I The training is stopped at error 0.01 after2080 steps
I η = 0.2
I The weights are W = [0.03 3.66 2.73]T ,
V =
[−1.29 −3.04 −1.540.97 2.61 0.52
]I Magnitude of error associated with each
training pattern are shown on the surface
I Any generalization provided by trainednetwork is questionable.
Farzaneh Abdollahi Neural Networks Lecture 3 29/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Example Cont’d, Experiment 2
I Using the same architecture but with 64training points covering the entire domain
I The training is stopped at error 0.02 after1200 steps
I η = 0.4
I The weights areW = [−3.74 − 1.8 2.07]T ,
V =
[−2.54 −3.64 0.612.76 0.07 3.83
]I The mapping is reasonably accurate
I Response at the boundary gets worse.
Farzaneh Abdollahi Neural Networks Lecture 3 30/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Example Cont’d, Experiment 3
I Using the same set of training points anda NN with 10 hidden neurons
I The training is stopped at error 0.015after 1418 steps
I η = 0.4I The weights are
W = [−2.22 − 0.3 − 0.3 − 0.47 1.49−0.23 1.85 − 2.07 − 0.24 0.79 − 0.15]T ,V =[
0.57 0.66 −0.1 −0.53 0.14 1.06 −0.64 −3.51 −0.03 0.010.64 −0.57 −1.13 −0.11 −0.12 −0.51 2.94 0.11 −0.58 −0.89
]I The result is comparable with previous case
I But more CPU time is required!!.
Farzaneh Abdollahi Neural Networks Lecture 3 31/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Initial WeightsI They are usually selected at small random values. (between -1 and 1
or -0.5 and 0.5)
I They affect finding local/global min and speed of convergence
I Choosing them too large saturates network and terminates learning
I Choosing them too small decreases the learning rate.
I They should be chosen s.t do not make the activation function of itsderivative zero
I If all weights start with equal values, the network may not trainproperly.
I Nguven-Widraw method:I Select the hidden layer weights randomly between -0.5 and 0.5I Normalize them by Vi = βVi
‖Vi‖where β = 0.7M1n , n: input vector length,
M: # hidden neuronsI Select the output layer weights randomly between -0.5 and 0.5
Farzaneh Abdollahi Neural Networks Lecture 3 32/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Error
I The training is based on min error
I In delta rule algorithm, Cumulative error is calculatedE = 1
2
∑Pp=1
∑Rk=1(dpk − opk)2
I Sometimes it is recommended to use Erms = 1pk
√(dpk − opk)2
I If output should be discreet (like classification), activation function ofoutput layer is chosen TLU, so the error is
Ed =Nerr
pk
where Nerr : # bit errors, p: # training patterns, and k # outputs.
I Emax for discreet output can be zero, but in continuous output maynot be.
Farzaneh Abdollahi Neural Networks Lecture 3 33/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Training versus Generalization
I If learning takes long, network losses the generalization capability. Inthis case it is said, the network memorizes the training patterns
I To ovoid this problem, Hecht-Nielsen (1990) introducestraining-testing pattern (T.T,P)
I Some specific patterns named T.T.P is applied during training period.I If the error obtained by applying the T.T.P is decreasing, the training
can be continued.I Otherwise, the training is terminated to avoid memorization.
Farzaneh Abdollahi Neural Networks Lecture 3 34/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Necessary Number of Patterns for Training setI Roughly, it can be said that there is a relation between number of
patterns, error, and number weights to be trainedI It is reasonable to say number of required pasterns (P) depends
I directly to # of parameters to be adjusted (weights) (W )I inversely to acceptable error (e)
I Beam and Hausler (1989) proposed the following relation
P >32W
eln
32M
e
where M is # of hidden layersI Date Representation
I For discreet (I/O) pairs it is recommended to use bipolar data ratherthan binary data
I Since zero values of input does not contribute in learning
I For some applications such as identification and control of systems, I/Opatterns should be continuous
Farzaneh Abdollahi Neural Networks Lecture 3 35/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Necessary Number of Hidden NeuronsI There is no clear and exact rule due to complexity of the network
mapping and nondeterministic nature of many successfully completedtraining procedure.
I # neurons depends on the function to be approximated.I Its degree of nonlinearity affects the size of network
I Note that considering large number of neurons and layers may causeoverfitting and decrease the generalization capability
I In classification, Mirchandini and Cao (1989) showsI Max number of linearly separable regions (M), using J hidden neurons
in n-dimensional input space is
M(J, n) =n∑
k=0
(Jk
)
where
(Jk
)= 0 for J < k
Farzaneh Abdollahi Neural Networks Lecture 3 36/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Learning Constant
I Obviously, convergence of error BP alg. depends on the value of η
I In general, optimum value of η depends o the problem to be solved
I When broad minima yields small gradient values, larger η makes theconvergence more rapid.
I For steep and narrow minima, small value of η avoids overshootingand oscillation.
I ∴ η should be chosen experimentally for each problem
I Several methods has been introduced to adjust learning const. (η).
I Adaptive Learning Rate in MATLAB adjusts η based onincreasing/decreasing error
Farzaneh Abdollahi Neural Networks Lecture 3 37/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I Delta-Bar-DeltaI For each weight a different η is specifiedI If updating the weight is in the same direction (increasing/decreasing)
in some sequential steps, η is increasedI Otherwise η should decrease
I η can be defined exponentially,I At first steps it is largeI By increasing number of steps and getting closer to minima it becomes
smaller.
I Momentum method
I This method accelerates the convergence of error BP
I Generally, if the training data are not accurate, the weights oscillateand cannot converge to their optimum values
I In momentum method, the speed of BP error convergence is increasedwithout changing η
Farzaneh Abdollahi Neural Networks Lecture 3 38/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I In this method, the current weight adjustment confiders a fraction ofthe most recent weight
4w(t) = −η∇E (t) + α4w(t − 1)
where α is pos, const. named momentum const.
I The second term is called momentum term
I If the gradients in two consecutive steps have the same sign, themomentum term is pos. and the weight is changes more
I Otherwise, the weights are changed less, but in direction ofmomentum
I ∴ its direction is corrected
Farzaneh Abdollahi Neural Networks Lecture 3 39/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I Start form A’
I Gradient of A’ and A” have the samesigns
I ∴ the convergence speeds up
I Now star form B’
I Gradient of B’ and B” have the differentsigns
I ∂E∂w2
does not point to min
I adding momentum term corrects thedirection towards min
I ∴ If the gradient in two consecutive stepchanges the sign, the learning const.should decrease in those directions(Jacobs 1988)
Farzaneh Abdollahi Neural Networks Lecture 3 40/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Steepness of Activation FunctionI If we consider λ 6= 1 is activation function
f (net) =2
1 + exp(−λnet)− 1
I Its time derivative will bef ′(net) = 2λexp(−λnet)
[1+exp(−λnet)]2
I max of f (net) when net = 0 is λ/2
I In BP alg: 4wki = −ηδokyj whereδok = ef ′(netk)
I ∴ The weights are adjusted in proportionto f ′(net)
I slope of f (net) (λ) affects the learning.
I The weights connected to the unitsresponding in their mid-range are changedthe most
Farzaneh Abdollahi Neural Networks Lecture 3 41/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
I The units which contributes less or are saturated change less.
I In some MLP, the learning constant is fixed and by adapting λaccelerate the error convergence (Rezgui 1991).
I But most commonly, λ = 1 are fixed and the learning speed iscontrolled by η
Farzaneh Abdollahi Neural Networks Lecture 3 42/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Adaptive MLP
I Usually smaller nets are preferred. BecauseI Training is faster due to
I Fewer weights to be trainedI Smaller # of training samples is required
I Generalize better (avoids overfitting)
I Methods to achieve optimal net size:I Pruning: start with a large net, then prune it by removing not
significantly effective nodes and associated connections/weightsI Growing: start with a very small net, then continuously increase its size
until satisfactory performance is achievedI Combination of the above two: a cycle of pruning and growing until
no more pruning is possible to obtain acceptable performance.
Farzaneh Abdollahi Neural Networks Lecture 3 43/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
A Pruning Method
I PruneI Nodes with small incoming weightsI Weights with small magnitude (almost zero)I Weights which do not affect the network output significantly
I If ∂o∂w is negligible
I Or by examining 4E = ∂E∂w + 1
2E”(4w)2 where E” = ∂∂w ( ∂E
∂w )
I When E approaches a local min: ∂E∂w ' 0
I ∴4E ' 12E”(4w)2
I To remove w consider 4w = −wI If the resulting 4E (i.e. 4E ' 1
2E”(−w)2) is significantly small, theweight will be removed
I Input nodes can also be pruned if the resulting change of 4E isnegligible
Farzaneh Abdollahi Neural Networks Lecture 3 44/45

Outline Linearly Nonseparable Pattern Delta Learning Rule Universal Approximator Learning Factors Adaptive MLP
Example of growing:corner isolation problem
I Consider activation functions are withsigmoid function
I Training without hidden node: 4 out of12 patterns are misclassified
I After adding 1 hidden node, only 2patterns are misclassified
I After adding the third hidden node, all 12patterns are correctly classified
I ∴ At least 3 hidden nodes are required
Farzaneh Abdollahi Neural Networks Lecture 3 45/45