Embed Size (px)
Citation preview

Network−Based Techniques for RTK Applications
Gerhard Wübbena, Andreas Bagge, Martin SchmitzGeo++®, Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbH
D−30827 Garbsen, Germanywww.geopp.de
BIOGRAPHY
Dr. Gerhard Wübbena received his degrees in Geodesyfrom the Universität Hannover. He has worked in thefield of GPS since 1983. In 1990 he founded thecompany Geo++®, which develops satellite navigationand positioning software and systems. Among these arethe post−processing system GEONAP and the real−timesystem GNSMART.
Andreas Bagge got his Dipl.−Ing. in Geodesy from theUniversität Hannover. Since 1986 he works in the fieldof GPS, first at the Universität Hannover, and now forseveral years at Geo++®.
Dr. Martin Schmitz received his degrees in Geodesyfrom the Universität Hannover. He has been working inthe field of GPS for the industry and as a research fellowat the Universität Hannover since 1991.
All authors are currently employed at Geo++®. They areconcerned in research and development in satellitepositioning. Current projects focus on highly preciseRTK phase positioning (GNSMART), GPS stationcalibration projects and real−time deformationmonitoring systems.
ABSTRACT
The accuracy of today’s RTK is limited by the distancedependent errors from orbit, ionosphere and troposphereas well as station dependent influences like multipath andantenna phase center variations. The basic idea ofGeo++® GNSMART (GNSS − State Monitoring AndRepresentation Technique) is to analyze the data from areference station network to estimate and represent thestate of individual components of the GPS error budgetin real−time.
All stations of a network are processed simultaneouslyfor best estimation of global parameters and to increasethe reliability of the results. The complete state cannormally not be used by the rover directly. ThereforeGNSMART can derive several types of representationsfrom the complete state model, adequate for specialtransmission or rover requirements to reduce the GNSSerror budget significantly. The implementation wasoperable before the current solar activity maximum, andis currently installed on many reference stations aroundthe world under different ionospheric conditions. Recentresults show the capabilities of GNSMART. Horizontalaccuracy of 1 centimeter can be achieved withinitialization times of 30 seconds, often even within 10seconds over distances of more than 30 kilometer.
Presented at the GPS Symposium, GPS JIN 2001, GPS Society, Japan Institute of Navigation, November 14.−16., 2001,Tokyo, Japan.

INTRODUCTION
Everybody is in the know of the burden to operate a localreference station in the field, in addition to relate thecoordinates to the actual local datum. A now commonlyaccepted remedy is the use of permanently workingreference station networks. Benefit is the generalincrease in reliable RTK (real−time kinematic)positioning, but also over medium distances and underunfavorable atmospheric conditions. The strongdisturbances experienced in the culminating solar cycle23 finally made the need for new strategies in real−timemulti−station networks obvious. However, there is aworldwide discussion on these topics, which basicallyoriginates from the fact of missing standards. Since thebeginning of the 1990’s, Geo++® is investigating anddeveloping software in the field of reference stationnetworks (i.e. Wübbena, Bagge 1995, Wübbena et al.1995). The goal of all research is to predict and representthe complete state of all physical parameters and toenable a rover system to apply autonomously the stateinformation or a derived representation.
UNDIFFERENCED PARAMTER ESTIMATIONCONCEPT
Generally, linear combinations of GPS observables areused to eliminate errors. For instance, the so−calleddouble difference GPS observable is the pseudorangedifference from two stations to two satellites, whicheliminates the receiver and satellite clock biases. Itfurthermore reduces the effect of highly correlated errorterms.
Our approach uses undifferenced observables. Therefore,it is necessary to model and estimate all errorcomponents including the clock errors. The gain ofinformation through these models in GPS processingwith undifferenced observables will give improvedresults. It is more rigorous compared to the doubledifferences, where correlations in multi−stationapplications are typically neglected in the adjustment.
A GPS processing using undifferenced observables caneasily be extended for additional unknowns and models.It is even in question, if a double difference softwaremight be able to estimate some parameters of interest.Differencing eliminates error terms but also information.Differenced observables are no longer single stationrelated but vector related. Absolute information in themeasurement is differenced out, i.e. differencedobservables are not directly usable for absolutepositioning.
THE OBSERVATION EQUATION
The observation equation for a pseudorange PR derivedfrom carrier phase measurements is a non−linear functionof the geometric range
�R i
k
�R i
k � �X k � �X i (1)
between the assumed (broadcasted) antenna phase centerof satellite k and receiver i, the ambiguity term Ns,i
k ,several biases, and random measurement errors � s,i
k :
PRs,ik � �R i
k ���sNs,i
k ��� Bs,ik � �
s,ik (2)
This pseudorange equation is set up for each signal s thatis transmitted by a radio navigation satellite. In caseGLONASS is employed, it will be necessary todistinguish the frequencies of the carrier phase signals byusing the index f. Different carrier wavelengths � s
f foreach satellite need then to be introduced. All error termsin (2) and in the subsequent equations are expressed asrange errors. Because all quantities are time dependent, acorresponding index is not explicitly applied.
In order to not overload the equations, we assume thatthe pseudorange in (2) is already corrected for standardportions like broadcasted satellite clock errors,relativistic corrections, tropospheric delay modelcorrection etc. The biases explained in the followingtherefore describe the remaining model biases for thecorresponding terms.
The bias term � Bs,ik comprises all clock related errors� Cs,i
k , and systematic influences that will be divided forfurther analysis in distance dependent errors � Ds,i
k andmainly station dependent errors � Ss,i
k :
� Bs,ik � � Cs,i
k �� Ds,ik ��� Ss,i
k (3)
The signal transmission time at the satellite and thesignal reception time at the receiver are distorted byclock errors � t i , � tk and signal delays � ds,i , � ds
k in thehardware of the satellite and the receiver, respectively:
� C s,ik � � t i
��� ds,i� � tk � � ds
k � � Cs,i� � Cs
k (4)
The orbit error vector � �o k together with signalpropagation changes caused by ionosphere � I s,i
k andtroposphere � Ti
k make up the distance dependent biases:
� Ds,ik �
�R i
k
�R i
k
� �ok ��� I s,ik �� Ti
k (5)
The error term � Ds,ik cancels out only for short baselines.
However, the estimation of these spatial and temporalcorrelated errors is the key issue for precise real−timepositioning. The successful modeling in a referencestation network improves the ambiguity fixing withrespect to the reduction of the time to fix ambiguity(TTFA), and increases reliability significantly.Positioning with cm−level accuracy becomes practicablealso over longer inter−station distances. With the statespace approach, a suitable estimation methodology willbe proposed in the next sections.

Phase center variations (PCV) of the receiver antenna� A f,ik and multipath � Ms,i
k are station dependent errors.Just for completeness, also phase center variations � E f,i
k
and multipath � Ws,ik at the satellite antenna are
accounted for in the error term � Ss,ik , although these are
not yet considered in practice:
� Ss,ik � � A f,i
k ��� Ms,ik �� E f,i
k ��� Ws,ik (6)
The characteristic of the station dependent componentsof the error term is that they are uncorrelated betweenstations. Therefore, the components have to be reduced,corrected or neglected.
Efficient procedures for absolute antenna calibrationhave already been developed by Wübbena et al. (1996,2000). Absolute calibration of antennas can compensateerrors induced by use of different antenna types, anddifferent antenna orientations. The characteristic ofsatellite PCV is currently investigated (Mader, Czopek2001). Methods to determine a site specific multipathpattern are under investigation (Böder et al. 2001), whichtake advantage of the fixed reflector to antenna geometryat reference stations and of the daily repeatability ofmultipath. An alternative or additional approach uses thestate space estimation within the reference network toaverage out the remaining multipath since it isuncorrelated between stations.
THE GOAL OF RTK NETWORKS
Being in the field, receiving all necessary correction datavia a communication link to determine the absoluteposition of a GNSS rover station at any location within afew seconds and with millimeter precision is the idealsituation for a GNSS user. Developments of software andalgorithms for RTK networks show the way into thisdirection.
Fig. 1: Millimeter Precision for a GNSS rover withultimate correction data provided by GNSMART
OBSERVATION SPACE AND STATE SPACE
In post−processing applications, measurements of two ormore GPS receivers are processed simultaneously. Inreal−time differential applications, on the contrary,corrections are derived at reference stations andtransmitted to the user. The corrections can be eithercomputed in the position domain or in the observationdomain. The position corrections turned out to beimpracticable mainly due to the fact that identicalsatellites must be observed at the reference and the usersite.
Pseudorange and carrier phase corrections offer muchmore flexibility for differential positioning and hencethey are the basic parameters in the commonly appliedRTCM standard. It will be shown later that this type ofcorrections are equivalent to single or double differenceprocessing of raw measurements. In either way, however,all errors determined at a reference station are lumped toone parameter describing the total influence on theobservation. I.e. the corrections are given in theobservation space domain. This means in practice thatthe user has to be aware of the principle problems relatedto this approach. In standard RTK applications forinstance, the distance to the reference station is oneperformance limiting factor. Another problem is, thatreference station specific errors like PCV and multipathmay be inherent in the corrections.
Based on the already mentioned undifferenced parameterestimation concept, differential GPS positioning in thestate space domain is proposed as an alternative concept.Instead of generating just one lump sum parameter, thestate of each error component is determined fromobservations of a network of reference stations.
THE IDEAL SOLUTION
The ideal situation for a GNSS rover user in the fieldwould be to get the information about the state of all theexternal error terms affecting his measurement withmillimeter accuracy from one or more service providersor, more convenient, from the satellites itself.
However, the models currently applied are not sufficientto describe the complete state with millimeter accuracyin a global sense. Effects with high spatial correlation,like satellite antenna phase center variations or multipathat the satellite are not known very well and thus limit theprecision of the models. Such model deficiencies,however, can be compensated by other state parametersin regional networks.
Another topic on the way to such an ideal solution isstandardization. The state parameters of the satellites andthe atmosphere need to be described in an internationalaccepted standard. There are currently discussions onnetwork RTK within the RTCM group. Even with simplemodels related to the observation space the discussionprocess is slow (Euler et al. 2001).

The advantages of state space representation are found inseveral aspects. State space representation of the errorterms of satellites and upper atmosphere are no longerrelated to a specific reference station (including a virtualreference station) or group of reference stations. Forinstance, the state of satellite dependent errorcomponents may be derived from different observationsthan the atmospheric errors. The station dependenttropospheric delay parameters can be derived frommeasurements to other satellites or even from otherdevices/techniques like water vapor radiometers.Reference station dependent errors can be reduced ifthere is enough redundancy in a network.
Within an RTK network the errors affecting a roversmeasurements need to be predicted or interpolated fromthe reference network.
The prediction or interpolation model for stateparameters can be based on the knowledge about thephysical behavior of the respective parameters. Forinstance the function for the influence of orbital errors ispurely deterministic. The prediction of troposphericerrors, however, may be much more complex andvarying with time. Additional information about theactual meteorological situation could be used to improvethe tropospheric prediction.
For the observation space an interpolation of thecombined effects has to be done. Only arbitraryfunctional models like polynomials and/or stochasticinterpolation are efficient. This makes an optimumsolution impossible.
A network running in state space mode will be able toprovide information in state space as well as inobservation space domain. Failures of individualreference stations will generally not affect a network instate space mode. However, a network in pureobservation space mode may fail in the respective areas.
A reference network in a multi−station mode usingcomplete state space modeling of observations results inbetter performance than simple approaches inobservation space with only a few stations involved(typically three). This is due to the fact, that theredundancy in the first approach is much higher than inthe second and the complete model is more resistantagainst biased estimates. This means that the distancebetween reference stations may be much larger in statespace mode and the performance, for instance, withrespect to the time to fix ambiguities and reliability, isbetter.
Real−time applications require a communication linkbetween a service provider and user. The bandwidth ofthis link is one important design factor. With state spacerepresentation an optimum bandwidth will be possible,since the update rates for the different parameters can beoptimized with respect to their physical behavior.Another aspect is the necessity for duplex links in case of
the so−called virtual reference station (VRS) approach.With state space information a simplex link is sufficient,which allows broadcasting media to be used for anunlimited number of users.
The importance of state space modeling goes beyondprecise positioning of rover receivers in a RTK network.Of equal significance is the operation of a real−timemulti−station reference network. The state vectorcontains all information necessary for monitoring thecomplex dynamic system, which gives the DGPS serviceprovider the opportunity to optimize the networkconfiguration. In case of irregular conditions of one ofthe state parameters, warnings can be issued to the users.
EXISTING STATE SPACE APPROACHES
Precise ephemeris routinely used in post−processing arean example of state space parameters. In addition,Zumberge et al. (1997) derived precise satellite clockcorrections enabling precise point positioning (PPP) for asingle station. This approach has been extended for real−time positioning with better than 2 decimeter accuracy ina global DGPS network (Muellerschoen et al. 2001) bysupplying corrections to broadcast ephemeris and clockparameters derived from state space modeling.
For RTK networks Geo++® GNSMART (GNSS − StateMonitoring And Representation Technique) uses statespace modeling based on carrier phase observables(Wübbena, Willgalis 2001, Wübbena et al. 2001).
CURRENT RTK − TRANSMISSION OFREFERENCE DATA
For the transmission of GPS data from a reference stationto a rover station two general kinds of data types arecurrently used. Referring to the RTCM format these areGPS raw data types 18/19 and GPS correction data types20/21.
It will be shown, that both data types are equivalentconsidering a single difference observation equation atthe rover site. The single differences are used only for aclear writing. An essential feature of GNSMART is theuse of undifferenced observables, which requires andenables the modeling of all components of the error term� Bs,i
k explicitly. Double difference processing canproceed with the combination of single differences.
For types 18/19, a single difference for satellite k can becomputed between the reference i and rover station jusing observable (2). The sign has been replaced in thenotation by � for biases, that cannot be modeled by therover and are therefore acting as errors:
PRs,ijk �
�R ij
k �� Nijk � � C ij
� � � D ijk
� � � Sijk � �
ijk (7)
For types 20/21 the correction term is computed from theactual GPS measurements to a satellite, known reference

position and broadcast ephemeris. In order to have smallnumerical values, the reference station clock ���t i
k isestimated and used to reduce the clock bias � Cs,i
k .Instead of equation (2), the transmitted pseudorangecorrection PRC s,i
k generated at a reference station reads:
PRCs,ik � PRs,i
k � �R ik � � �t i
k (8)
Substituting equation (2) yields for the correction:
PRCs,ik � �
s Ns,ik ��� Bs,i
k � ���t ik � �
s,ik (9)
I.e. the pseudorange or carrier phase corrections areessentially the sum of all biases in the observation plusthe random measurement errors. A constant receiverclock term may be added for all satellites to reduce thesize of the numerical values. The correction isambiguous for carrier phase measurements.
Using the above correction term to generate a correctedpseudorange observation equation CPRs,ij
k for the roverstation j, yields:
CPRs,ijk � PRs,j
k � PRC s,ik (10)
Introducing equation (2) and (8) with its bias terms andre−arranging the single difference leads to:
CPRijk �
�R ij
k �� Nijk � � C ij
�����t i� � � Dijk � � � Sij
k � �ijk (11)
The comparison with (7) shows, that corrections arerelated to single differences, except for the receiver clockbias term. However, this cancels out through doubledifference processing. It is essential, that there is anidentical error term
� �,ij
k � � � Dijk � � � Sij
k � �ijk
(12)
in equation (7) and (11). There is only a constantdifference in the receiver clock of the reference station,which does not have any effect on the standard doubledifference processing. Hence, the RTK applicationperformance is independent of the actual format used totransport reference data to a rover.
RTK NETWORKS
In single reference station RTK, there is no informationon the individual error term � �
,ij
k, which is then normally
neglected. However, especially the distance dependentbiases introduce RTK positioning errors. The main focusof a network processing is the modeling andrepresentation of the error components of ���D ij
k , whichcan be predicted for any rover position to provide better,reliable and faster positioning.
In the following we will present the network informationas additional terms added to the basic correctedpseudorange as derived from type 20/21 messages fromone reference station. This approach is currently used inreal implementations due to a number of practicalreasons. First of all the basic correction messages coverthe major part of the error components. Especially thefast varying satellite clock errors. The update rate for thispart of the corrections is typically 1 Hz or more. Thedistance dependent errors have much lower dynamics,i.e. they can be updated at a lower rate. The latency ofthe basic corrections should be small, whereas thelatency of the additional network information can behigher.
The corrected pseudorange observation equation from areference station network using RTCM types 20/21 datacurrently is similar to:
CPRijk �
�R ij
k �� Nijk � � C ij
k � ���t ik � ��Dij
k
� � � Sijk � � ���Pn
k � �ijk (13)
The differences to equation (11) are the correction termfor the distance dependent errors and the networkdependent prediction error � � �Pn
k .
The network prediction error (network representationerror) is a complex function of the number of referencestations n, their spatial distribution and other factors. Itincludes the model error of the prediction or interpolationas well as an indirect effect of all participating referencestation dependent errors. The rover position relative tothe reference stations also affects the magnitude of thisresidual error term.
One often formulated requirement is, that a rover close toone reference station position should not be affected bythe additional network information, i.e. it should get thebasic corrections from that particular reference station.To fulfill this requirement, the network cannot correct forstation dependent errors of the reference stations.However, in a multi−station network it is possible toestimate station dependent errors and to derive acorrection term. Since the station dependent errors arenot spatially correlated, it would be worthwhile to correctfor them.
The correction data CPRs,ijk are computed from actual
data of the reference station i. Therefore the stationdependent error term � � Sij
k of this particular station i andthe rover j is completely part of the correction signal(e.g. multipath effect).
For the use at a rover station, an adequate representationof the correction data � �Dij
k is required. Up to now,reference station networks consist often only of a fewstations. This circumstance limits the development ofsuitable models for network RTK as well as the progressof standards for carrier phase based differentialpositioning. The mode of operation and the capabilities

of software resemble in most cases RTK algorithms,which are not suitable for medium range RTK, and donot take full advantage of the information of a network.
The rover manufacturers currently also demand for moreinformation on the provided reference data, whichrequires new features of the current standards (Euler etal. 2001).
RTK NETWORKS − FKP MODE
One way of representing the additional corrections forthe distance dependent errors is a polynomialparametrization to describe the influence for any roverposition in a certain area. Depending on the temporal andspatial variation the orders of the representation must bedefined. The RTCM standard currently limits thecorrection data to be formulated in the observation space,which means, that modified GPS observable must beused.
The area correction parameters (commonly called FKP),are the most flexible and suitable way to represent thestate. FKP can be assumed for this discussion as arepresentation of the full state space information. FKPare more or less simplified to reduce the requiredbandwidth for transmission or the complexity to apply itat the rover. The state has to be transferred to theobservation space, because most rover systems arecurrently not capable to handle any state spaceinformation. The FKP allow the prediction of thedistance dependent error term for the approximatelyknown rover position:
��Dijk � f FKPi
k , �� ij , � ij , hij (14)
This can be done independently from the networkprocessing as only the rover coordinates and satelliteinformation are required.
It is a major advantage, that FKP can be distributed bybroadcast media, which is requested by most serviceproviders. The FKP do also not contain absolutetropospheric information, but gradients of thetroposphere. The tropospheric effect for a referencestation can therefore be figured out and applied correctlyto the data by the rover.
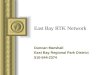
The dimensions of networks and the coverage ofdistribution media often make a linear FKPrepresentation sufficient. The coverage of a linear FKPmodel is then centered to a real reference station, and theFKP describe the horizontal gradients for the geometricand ionospheric signal components in the observationspace (Fig. 2).
Fig. 2: Linear FKP planes for four reference stations
A virtual reference station (VRS) can easily be computedfrom FKP, because all relevant information is included inthe data stream to individualize the corrections for agiven position. The individualization can even becomputed at the rover, preserving the advantage ofbroadcast signals.
RTK NETWORKS − VRS MODE
A pre−requisite of the virtual reference station (VRS)concept is the need of a duplex communication linkbetween a node of the reference station network and therover.
The rover has to transmit its approximate coordinates tothe network, which then interpolates from the stateinformation a reference data stream VRSij
k for the givenposition. The data relates to the observation space:
�X VRS
� ! �X j (15)
VRSijk � CPRij
k � f FKPik , �� ij , � ij , hij� Tmodel,ij
(16)
Equation (16) contains a tropospheric term Tmodel,ij ,which describes the difference between the troposphericdelay model used in the network processing on theoriginal reference station and the virtual referencestation.
Due to the RTCM definitions, the reference station maynot correct for tropospheric errors. This is in general areasonable restriction, because it avoids the problem ofusing inconsistent models for reference station and rover,while the rover is responsible to compute corrections forboth sides. This, however, requires the knowledge of thereference station coordinates at the rover. Since the onlycoordinates the rover knows about are originating fromthe RTCM data stream, the rover does only know the

coordinates of the VRS. Hence, the rover cannotcompute the tropospheric correction for the real, but onlyfor the VRS. In consequence, the network has to applythe tropospheric correction between real and virtualreference station. And here there is again the problem ofpossible inconsistency, if it is done with a differentmodel than the rover applies.
In the VRS concept, the coordinates (in RTCM messagetype 3) are changed to VRS location, hiding the truereference station completely from the rover. Onedisadvantage of the VRS concept is, that for a kinematicrover continuously updated approximate coordinateshave to be used for the VRS computation (movingreference station). Today, most rover systems cannothandle a kinematic reference station. A system reset isperformed, if the VRS coordinates are changing, whichwill result in frequent initialization of ambiguities. Inpractice, the VRS position therefore does not change.However, this implies that distance dependent errors willbe present in the rovers solution once it starts to moveaway from the virtual reference.
Typically, some irregular physical effects occur, whichcan hardly be determined by a reference station networkwith given station distances. In this context, the referencestation network can be considered as a limited number ofmonitoring stations or sensors with a certain andrestricted spatial capability. The errors may arise fromlocal troposphere or turbulent ionospheric conditions.Even if these higher order errors cannot be determined bythe reference station network, it is obvious that theirmagnitude is a function of distance from the next truereference station. Thus, if the rover knows the referencestation position(s), it can take into account these higherorder errors and improve its own RTK models, e.g. bystochastic ionospheric modeling. If the rover knows onlythe VRS position, it has no chance to do such kind ofimprovement.
It should be mentioned that there are different types ofVRS depending on the type of networking model. A VRSderived from the observation space (OSP−VRS) showsdifferent behavior than a VRS derived from a state spacemodel (SSP−VRS). This results from the fact, that aSSP−VRS is much less affected by current individualreference station errors than the OSP−VRS. Since thestate vector is the result of a continuously running filter,the influence of station dependent errors reduces, themore redundancy (number of stations and satellites) isavailable in the network. A similar filtering in theobservation space can only be done with arbitrary modelsand is therefore less effective. Especially the non−dispersive part of the signal is much smoother if derivedfrom state information than from the observation state.GNSMART provides SSP−VRS.
RTK NETWORKS − STATE SPACE MODEL
The use of the non−dispersive characteristic of someerror components is a common procedure to generate an
geometric and an ionospheric part of the error budget.The geometric part mainly contains the orbit andtropospheric error components, while the dispersive partis due to the ionospheric propagation delay in theatmosphere. Both parts are correlated through signaldelays and clocks.
The state space model, however, performs a functionaland stochastic separation also of the tropospheric andorbit error component. It is even possible to estimate thediscussed error terms of higher order in the state spacemodel of a reference station network.
In principle, it should be possible to use state vectorcomponents estimated in different networks. Parameterswith global character, like satellite orbits and clocks,could be determined in a global network. The regionaltrend of the ionospheric delay is best estimated inregional networks, and small scale networks are neededfor modeling local ionospheric and tropospheric effects.Following this strategy, new concepts regardingdistribution and spacing of reference stations areconceivable. Densely populated areas and importanteconomic regions will be covered by a close−meshedreference station network for highest accuracy andreliability in positioning, whereas less important areasare covered by a wide−meshed network of regional ornational extension. There is no need that all levels ofnetworks are operated by the same provider. The mainproblem realizing such an hierarchical approach is toensure the data consistency, which is difficult because ofhigh correlations between state parameters. Thedefinition of suitable standards is indispensable for suchplans.
Assuming that the state parameters are estimated withsufficient accuracy, they are transmitted to the user whocan eliminate the corresponding error terms of hisobservation equation, and derives a precise absoluteposition. The use of corrections in the state space domainrequires again suitable standards, which are currently notavailable. Instead, the state parameters are reduced toobservation domain corrections.
Generally, a rover has not much knowledge about thequality of the received reference data, which wouldenable autonomous decision for the RTK roverprocessing. Better concepts are possible, if the actualstate information and stochastic behavior of the residualerrors are used instead of corrections in the observationspace. Actual state information can describe all physicaleffects at the rover location without even providingobservation data of a reference station. Only thetransformation of the state into the observation space ofthe rover is required using standardized models.
STATE SPACE ESTIMATION

The Kalman filter is proofed to be well suited for stateestimation and monitoring tasks (Wübbena 1991). Themethodology of state space modeling can be applied toreal−time carrier phase based positioning in multi−station networks, which was suggested by Wübbena,Bagge (1997).
Fast and reliable ambiguity resolution in the multi−station network requires highly accurate coordinates forthe reference stations. This applies to the absoluteposition in the global reference frame as well as to therelative coordinate vectors between the stations.Assuming that calibrated antennas are used, theambiguity term Ns,i
k has to be split off from the residualscontaining multipath and distance dependent errors:
Ns,ik � 1
� PRs,ik � �
R ik ��� Bs,i
k � �s,ik
(17)
Cycle Slips are detected and eliminated in advance inorder to keep the ambiguity vector small. WithGNSMART, the ambiguities are then estimated in asimultaneous dual−frequency adjustment together withthe complete state vector. Because of the implicitionospheric model, the adjustment will result in anionospheric free solution, but with the advantage of thelow signal noise of the L1 and L2 frequencies.
A Kalman filter is employed to process the dynamicmodel. The corresponding measurement model hasalready been introduced previously in (2). A simplifiednotation for the Kalman filter reads:
x t � 1� T t x t
� C t w t (18)
l t� A t x t
� v t (19)
Equations (18) and (19) contain the state vector x t � 1 ,transition matrix T t , transfer function matrix C t for the
process noise vector w t , as well as the linearizedmeasurement vector l t , design/system matrix A t and themeasurement error vector v t for an epoch t.
The state vector, where all states are written as sub−vectors, is rather complex and therefore only a briefsummary of the functional and stochastic models can begiven:
x � X i N ik � t i
� t k � ok � T ik � I s,i
k � M s,ik T (20)
Table 1 summarizes the functional and stochasticalproperties, which are currently used for the state spacemodeling within GNSMART.
GEO++® GNSMART
Geo++® developed and provides a real−time softwarepackage under the conceptional name GNSMART, whichstands for GNSS State Monitoring and RepresentationTechnique.
GNSMART has been designed with the followingfeatures in view:
� PC based, multi−tasking operating systemThe PC platform allows cheap and flexible hardware.GNSMART runs on multitasking operating systems(Windows NT/2000 or IBM OS/2) to allow theintegration with commercial or user providedsoftware.� Modular systemGNSMART is a modular system. It provides allcomponents for a (D)GPS service provider: referencestation, communication modules, GPS−multi−station−networking, integrity monitoring, alarmmanagement, data distribution and other special tools.The modules can run on a single computer ordistributed over local or wide area computer network.
Bias Functional Model Stochastic ModelSatellite clock 2nd order polynomial white noise processSignal delay (sv) constant integrated white noise processSatellite orbit cartesian elements 3D Gauss−Markov processIonospheric delay single layer model with polynomial (ϕ,
λ)1 bias per sv (vertical delay)
3D Gauss−Markov process(1 bias per rcv−sv combination)
Tropospheric delay modified Hopfield model 2 scaling parameter/stationReceiver clock offset − white noise process
(1 parameter/epoch)Signal delay (rcv) constant integrated white noise processSatellite PCV − −Receiver PCV calibration −Multipath (rcv) elevation dependent weighting 1st order Gauss−Markov processMeasurement noise − white noise processAmbiguity constant if fixed −
Table 1: Functional and stochastic description of GPS error sources in GNSMART

� Receiver independenceThe receiver modules in a GNSMART system allowto connect almost every GPS or GLONASS receiverwith RS−232 or TCP/IP interface and programmableinput/output. Currently modules for Leica, Ashtech,Javad, Topcon, Trimble and many others areavailable. Only the very basic data acquisitioncapabilities without any internal RAM or RTCMoptions are required, which allows to use cheapsensor hardware.� Compatibility to standard formatsGNSMART’s interfaces to external devices are basedon international standards, such as RTCM, NMEAand RINEX. Even the internal communicationbetween the various GNSMART modules is usingRTCM format. New features not yet covered by anyinternational standard, e.g. antenna or networkparameters, have been developed by Geo++® andproposed for next RTCM versions. � Real−time capabilitiesThe parameter estimation modules in GNSMART areusing dynamic models in a recursive Kalman filteralgorithm. This allows the program to runcontinuously for unlimited time, without anydiscontinuities for all estimated parameters � RedundancySince the state information is derived from all stationsin the network, a failure of individual stations doesnot affect the overall performance of the network. � High PerformanceThe models are capable to describe all errors of allvisible satellites, even down to 0° elevation. Thisallows to determine the state information for satellitesat very low elevation and therefore yields maximumavailability for rovers.
Primary products of GNSMART are available from thestate vector:
� satellite clocks and signal delays, satellite orbits, � ionospheric delay (electron content), � tropospheric delay (atmospheric humidity), � receiver clocks and signal delays, � reference station coordinates.
Derived products of GNSMART are:
� state representation through spatial model (FKP), � state prediction for rover position (VRS), � state transformation, e.g. precise regional satelliteclocks, orbits, total ionospheric electron content,tropospheric water vapor distribution, dynamicreference station movements.
With these capabilities, GNSMART provides thefollowing service areas:
� single reference stations (DGPS, RTK) (RTCM),VRS (DGPS, RTK) − requires duplex communicationlink to rover, � FKP transmission (DGPS, RTK) − broadcastcommunication to rover,
� filter state transmission (broadcast),� reverse DGPS/RTK (duplex communication, simplerover),� real−time and post−processing services.
The GNSMART package is running operational innumerous permanent reference station networksworldwide.
EMPIRCAL RESULTS
Empirical results are presented from a network in Japan,which has been installed for a benchmark test ofreference station network software packages at theGeographical Survey Institute (GSI) of Japan in March2001.
The conditions in Japan are very challenging, becauselarge inter−station distances are present and theionospheric activity in Japan is much higher compared toEurope or North America.
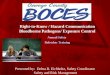
The network consists of five reference stations (Fig. 3),which uses different GPS equipment. The antennas arecorrected using absolute PCV type means to achievehomogeneous conditions. The inter−station distancerange from 32 to 95 kilometers, while a monitoring/roverstation is operated in a distance of 26 to 32 kilometersfrom the three closest reference stations 2005, 2001 and2002. The GNSMART network used the VRS mode forthe transmission of corrections.
Fig. 3: Screen shot of reference station distribution ofGNNET, main module of GNSMART, GSI RTKnetwork, Japan
However, the network has to be considered as a quite“weak” network, because only the minimum number ofrecommended stations are involved. More stationsimprove the redundancy and performance of a RTKnetwork, which has been experienced with largerinstallations in Germany.
A GNNET−RTK rover system operated on the monitorstation and performed over a time period of 3 hoursautomatically ambiguity resets 10 seconds after asuccessful ambiguity fixing. Hence, an analysis of timeto fix ambiguities (TTFA) is possible. Fig. 5 shows theambiguity initialization times, which do have a mean of

14 seconds. The TTFA exceeds in four cases 80 seconds(maximum 160 seconds), which are outside of theplotting range. A histogram of the TTFA reflecting themean is given in Fig. 6.
The GNNET−RTK system used a simultaneous dual−frequency adjustment of the L1 and L2 frequencies witha stochastic modeling of the remaining ionosphericresiduals.
The differences in the three coordinate components to amean position computed from the approx. 615 RTKposition solutions and the horizontal position scatter aredisplayed in Fig. 4. The standard deviation for thenorthing, easting and height component are5.7 millimeter, 5.5 millimeter and 13.5 millimeter,respectively. The overall standard deviation of the 3Dposition is 15.6 millimeter.
Fig. 4 : Histogram of deviation from the mean position in northing, easting, height (millimeter classes) and horizontalposition plot (units are meter), GSI RTK network, Japan
Fig. 5 : Time to Fix Ambiguity (TTFA): mean is 14seconds, GSI RTK network, Japan
Fig. 6 : Histogram of Time to Fix Ambiguity (TTFA):mean is 14 seconds, GSI RTK network, Japan

The real−time data set demonstrates the generalperformance of a GNSMART network. Accuracies at thecm−level are achieved over long distances and under thevery severe ionospheric conditions in Japan.
Fig. 8 : Screen shot of reference station distribution ofGNNET, main module of GNSMART, BrandenburgRTK network, Germany
The computer resources restrict the actual number ofstations to be processed on a single computer, becausethe number of arithmetic operations increase non−linearwith each station. Therefore currently sub−networks areused to distribute the computational burden. Therequirements for the sub−network design are mainly to
keep the complete information of the overall network andto provide continuity between sub−networks.
Fig. 8 shows a sub−network of the Brandenburg RTKnetwork in Germany. A kind of “hierarchical” networkdesign is used. There is no actual higher order network,but stations from a neighboring networks are used toextend the network dimension. The advantage then is,that long periodical effects of the distant dependenterrors can be estimated and can still be used by a roverstation.
In the given example, the distances of the surroundinghierarchical station from the core network range from 77to 116 kilometers. The investigations of sub−networksshow, that a sufficient number of station is capable tomodel all error components within the state space modelof GNSMART to an accuracy, which makes ambiguityresolution even over large distances possible.
This has the advantage, that the currently recommendedrestriction of 70 kilometers station separation can beexceeded. Also a failure of a complete sub−networkwithin a hierarchical network can be compensated,because the long periodical state information is stillavailable from a neighboring sub−network. This is againa significant benefit from the state space model used inGNSMART.
Fig. 7 : Histogram of deviation from known position in northing, easting, height (millimeter classes) and horizontal positionplot (units are meter), Brandeburg RTK network, Germany

The sub−networks approach allows also the use ofindependent monitoring stations, which can be used topermanently verify the RTK network performance. Theresults from a monitor station has been analyzed, whichis located in the sparse south−eastern part of thehierarchical network of Fig. 8. The distances to theclosest reference stations 9004, 9008 and 9011 are 47 to58 kilometers. The position of the monitor station hasbeen determined approximately 1544 times withindependent ambiguity resolutions during a test period ofapproximately 13 hours.
The differences in the three coordinate components to theknown position are displayed in Fig. 7. The standarddeviation for the northing, easting and height componentare 8.3 millimeter, 7.4 millimeter and 17.7 millimeter,respectively. The overall standard deviation of the 3Dposition is 20.9 millimeter.
The Brandenburg RTK network data show theperformance of a GNSMART network. Accuracies at thecm−level are achieved for a monitor/rover station in asparse RTK network with previously not attemptedinter−station distances of up to 116 kilometers.
SUMMARY AND CONCLUSIONS
Precise real−time positioning over long distancesrequires a network of GPS reference stations. Multi−station modeling accounts for the spatial correlatederrors, and hence speeds up the ambiguity resolutionprocess. A reference network provides redundancy whichensures higher accuracy and higher reliability for precisereal−time positioning.
The rigorous multi−station GNSMART system, which isbased on undifferenced observations has been presentedwith its concepts, implementation and results. The GPSerrors components are estimated in a state space model,which also allows a consequent state monitoring. Theindividual modeling of error components improves theprediction of corrections for GNSS users. Consideringthe different temporal characteristics of the errorcomponents, subsets of corrections can be disseminatedat different times in order to reduce bandwidthrequirements. For the state representation simplifiedmodels have to be used in the observation space sincestate space corrections are not supported by the currentstandards. One such representation is the FKP model, alow−order surface model especially suitable forbroadcasting PDGPS corrections.
There are several advantages, which suggest to definestandards also for transmission of state information. Oncethe corrections can be broadcast in the state spacedomain users are enabled to perform absolute positioningwith highest accuracy. Relative observations to thenearest reference station are no longer explicitlyrequired. The state space information implicitly providesthe user datum, derived from a larger network ofreference stations. In the future, the user will just observe
all available satellites and will obtain state spacecorrections from the service provider by means of anycommunication link.
With the current state space estimation and staterepresentation by FKP or VRS, positioning accuracies of1 centimeter in less than 30 seconds over 26 to 32kilometer have been demonstrated by empirical resultsfrom an installation of GNSMART in Japan.
Important factors are antenna phase center variations andmultipath at the reference station as well as at the roversite. High levels of ionospheric activities and travelingionospheric disturbances with wavelengths smaller thanthe reference station spacing also deteriorate the possibleaccuracy while using GPS error representation in theobservation space. However, the use of absolutecalibrated antennas is inevitable. The research on spatialvariations of multipath at reference station sites needs tobe continued.
The state space estimation improves with an increasingnumber of reference stations, and with a larger coveragearea. In principle, the state information can be derivedfrom different networks, but it is also possible tointegrate the different, currently independent networks bymeans of the state space approach. A high redundancyand a homogeneous reference frame over larger areaswould be the advantage. The matching of ambiguitylevels in different networks is a major part of the ongoingresearch. Again, for the exchange of consistent statespace information an adaptation of standards (models,corrections) is needed.
ACKNOWLEDGMENTS
We kindly acknowledge the cooperation of the JapaneseAssociation of Surveyors (JSA), the Geographical SurveyInstitute (GSI), Mitsubishi Electric Co. and AD NETInc.. The Landesvermessungsamt Brandenburg kindlyprovided data from their SAPOS network.
REFERENCES
Böder, V., F. Menge, G. Seeber, G. Wübbena, M.Schmitz (2001). How to Deal With StationDependent Errors − New Developments of theAbsolute Calibration of PCV and Phase−MultipathWith a Precise Robot. To be presented at theInternational Technical Meeting, ION GPS−01,Salt Lake City, Utah.
Euler, H.−J., C.R. Keenan, B.E. Zebhauser, G. Wübbena(2001). Study of a Simplified Approach UtilizingInformation from Permanent Station Arrays.Presented at the International Technical Meeting,ION GPS−01, Salt Lake City, Utah.
Jahn, C.−H., T. Ballmann, U. Feldmann−Westendorff(2001). Bericht über die Ergebnisse desVernetzungstests in Niedersachsen 2001.Landesvermessung und GeobasisinformationNiedersachsen, LGN, Hannover, http://

www.lgn.de/produkte/sapos/sapos.pdf, September2001.
Mader, G.L., F. Czopek (2001). Calibrating the L1 andL2 Phase Centers of a Block IIA Antenna. To bepresented at the International Technical Meeting,ION GPS−01, Salt Lake City, Utah.
Mullerschoen, R., Bar−Server, Y. W. Bertiger, D.Stowers (2001). NASA’s Global DGPS for High−Precision Users. GPS World, January, 14−20.
Wübbena, G. (1991). Zur Modellierung von GPS−Beobachtungen für die hochgenauePositionsbestimmung. Wissenschaftliche ArbeitenFachrichtung Vermessungswesen an derUniversität Hannover, Nr. 168, Hannover.
Wübbena, G., A. Bagge (1995). GPS−bezogeneOrtungssysteme. Presented at 37. DVW−SeminarHydrographische Vermessungen − heute −, 28.−29.März 1995, Hannover. Schriftenreihe des DVW,Band 14, Verlag Konrad Wittwer, 43.
Wübbena, G. A. Bagge (1997). Neuere Entwicklungenzu GNSS−RTK für optimierte Genauigkeit,Zuverlässigkeit und Verfügbarkeit Referenzsta−tionsnetze und Multistations− RTK−Lösungen. 46.DVW−Seminar, Praxis und Trends ’97, 29.9.−1.10.1997, Frankfurt a. M., Schriftenreihe desDVW, Band 35, Verlag Konrad Wittwer.
Wübbena. G., S. Willgalis (2001). State Space Approachfor Precise Real Time Positioning in GPSReference Networks. Presented at InternationalSymposium on Kinematic Systems in Geodesy,Geomatics and Navigation, KIS−01, Banff, June 5−8, Canada.
Wübbena, G., A. Bagge, G. Seeber, V. Böder, P.Hankemeier (1996). Reducing Distance DependentErrors for Real−Time Precise DGPS Applicationsby Establishing Reference Station Networks.Proceedings of the International Technical Meeting,ION GPS−96, Kansas City, Missouri, 1845−1852.
Wübbena, G., A. Bagge, G. Seeber (1995).Developments in Real−Time Precise DGPSApplications − Concepts and Status. Paperpresented at the IAG Symposium G1, IUGGGeneral Assembly, July 1995, Boulder, Colorado,USA.
Wübbena, G., A. Bagge, M. Schmitz (2001). RTKNetworks based on Geo++® GNSMART −Concepts, Implementation, Results. Presented at theInternational Technical Meeting, ION GPS−01,Salt Lake City, Utah.
Wübbena, G., M. Schmitz, F. Menge, V. Böder, G.Seeber (2000). Automated Absolute FieldCalibration of GPS Antennas in Real−Time.Presented at International Technical Meeting IONGPS−00, 19−22 September, Salt Lake City, Utah,USA.
Zumberge, J., M. Heflin, D. Jefferson, M. Watkins, F.Webb, F. (1997). Precise Point Positioning for theefficient and robust analysis of GPS data from largenetworks. Journal Geophysical Research, 102, B3.