Embed Size (px)
Citation preview

Acta Astronautica Vol. 25, No. 7, pp. 399-406, 1991 0094-5765/91 $3.00 + 0.00 Printed in Great Britain. All rights reserved Copyright © 1991 Pergamon Press plc
NAVSTAR GPS AND GLONASS: GLOBAL SATELLITE NAVIGATION SYSTEMSt
P. DALY Department of Electrical and Electronic Engineering, University of Leeds, Leeds LS2 9JT, England
(Received 30 May 1990: received for publication 20 February 1991)
Abstra~--Both the Navstar GPS and GLONASS satellite navigation systems developed respectively by the U.S.A. and the Soviet Union are now planned to become operational by 1995. Both systems are capable of providing the civil community with high-precision position-fixes and/or timing references on a continuous, world-wide basis. Already both systems have several satellites in orbit in order for pre-operational testing to be conducted. The paper discusses (i) the widely-differing launch histories of both systems, (ii) developments in planned use of orbits, (iii) the deliberate degradation of accuracy by the use of selective availability, (iv) progress in plans to provide a joint Navstar GPS/GLONASS civil satellite navigation system possibly integrated with other satellite ranging systems and (v) current status of both systems.
l . GLOBAL SATELLITE NAVIGATION SYSTEMS
Both the Navstar GPS and GLONASS satellite navigation systems developed respectively by the U.S.A. and the Soviet Union are now planned to become operational by 1995. They are intended to replace earlier satellite navigation systems (Transit and Cicada) also operated by the U.S.A. and U.S.S.R. which provide limited daily coverage and are unable to provide the user with velocity information. These two systems employ similar orbits with a small number of low altitude (1100 km) polar- orbiting satellites transmitting information at dual frequencies around 150 and 400 MHz. The user waits for a single satellite (possibly as long as 2 h) and then makes a series of doppler measurements during the short period (< 16 min) when the satellite remains above the horizon. The satellites' position and velocity are transmitted in the navigation message and these, together with the doppler measurements are sufficient to allow the user to compute his position. Transmissions on two frequencies are used to allow an ionospheric group delay correction to be applied. The two systems have two major drawbacks; the system is not available 24 h a day and the user velocity must be known.
In an effort to overcome the difficulties associated with the earlier systems both the U.S.A. and the U.S.S.R. plan to introduce precise, global, continu- ous position-fixing capabilities by using navigation satellites transmitting dual-frequency spread-spec- trum signals in L-band (1.2 and 1.6 GHz). In contrast to the earlier VHF systems, the primary navigation mode is based on range measurement rather than
tPaper IAF-89-396 presented at the 40th Congress of the International Astronautical Federation, Malaga, Spain, 7-13 October 1989.
integrated doppler. At present, both systems are in the pre-operational stage with a small number of satellites in two orbital planes. The two systems, both of which possess a military and a civil role, are the U.S.S.R.'s GLONASS and the U.S.A. Navstar GPS[1], designed to provide accurate position, velocity and time information.
2. NAVSTAR GPSIGLONASS OVERVIEW
The Navstar system will consist [2] of 21 primary satellites with 3 in-orbit spares in a near-circular orbit, 4 in each of 6 orbital planes separated by 60 ° so that observers anywhere on the surface of the Earth always have at least four satellites in view. The orbital period is around 12 h and the altitude approx. 20,000 km. In the early stages of the programme, the orbital inclination was defined to be 63 ° but this figure has since been amended to 55 ° to allow launch by the Space Shuttle. All satellites have a ground track repeat of two orbits with the result that they appear at the same position each day 4.07 min earlier than the previous day. The satellites also share a common time system known as GPS time and trans- mit a precise time reference as a spread spectrum signal at two frequencies in L-band: 1575.42 MHz (L1) and 1227.6MHz (L2). Two spread-spectrum codes are used: a civil Clear Acquisition (C/A) and a military Precise (P) code. The C/A code is a 1023 bit Gold code clocked at 1.023 Mbps, repeating every l ms. The P code is clocked at 10.23 Mbps and repeats after approx. 38 weeks. The same 50 baud data is modulo-2 added to each code before final BPSK modulation at the carrier frequency. The signal at L2 only contains the P code although the capability exists to include the C/A code; the signal at LI contains both a P and a C/A code modulated onto quadrature carriers.
399

400 P. DALY
Received signal power using an isotropic antenna is of the order of - 160 dBW for the C/A code and 3 dB less for the P code. The resultant received signal is some 22dB down on the ambient noise power within the signal bandwidth necessitating a code acquisition and signal despreading before carrier recovery can be accomplished.
GLONASS offers many features in common with Navstar GPS. In particular, the orbital plan foresees 24 satellites with 8 in each of 3 orbital planes separated by 120 ° and with spacing of 45 ° within the plane. It transmits two spread-spectrum signals in L-band at around the same power levels as Navstar GPS. Satellites are distinguished by radio-frequency channel rather than spread-spectrum code. A single code is used of length 511 bits repeating 1 ms. Information is differentially encoded in a RZ format with a final data rate of 50 baud.
Both Navstar GPS and GLONASS are currently in a pre-operational phase with 8 or 9 satellites available. Technical details of both systems [1,3,4] have been made available to international organiz- ations for the purposes of future planning requiring navigation satellites. They are both expected to reach full operational capability by 1995.
Table 1. Triple GLONASS launches: status--June 1989
International designator Cosmos GLONASS Plane
3. DEVELOPMENTAL PHASE
Global satellite navigation systems have been under development by the U.S.A and the Soviet Union since the 1970s although both nations already operated and in fact still operate a dual-frequency VHF satellite navigation system in near-polar, low Earth-orbit (U.S. Transit and U.S.S.R Cicada) providing limited time access but on a world-wide basis. The U.S. Navstar GPS system saw its first launch in 1978; the U.S.S.R.'s GLONASS system was inaugurated 4 years later. GLONASS satellites are launched three at a time from the Tyuratam space centre into near-circular orbits with period around 11.25 h at a height of 19,100km and inclination of 64.8 ° . Successful launches are followed by an announcement within a day or two in Pravda giving basic details of the mission. There have been 15 launches since the first one in late 1982, all of them successful except the ones in April 1987 and February 1988 where the satellites failed to reach final orbit because of a malfunction of the fourth stage of the Proton launch vehicle. Table 1 presents the international identifiers, Cosmos and GLONASS numbers of all known launches [5] since the first one in 1982; all triple launches have taken place into one of two orbital planes (referred to in Table 1 as planes A and B) separated by 120 °. No satellite has as yet been launched into the remaining plane C.
Each launch aims to produce a final stable near- circular inclined orbit at a distance from the Earth's centre of about four earth radii. Of the first 7 launches only two of the three launched satellites
1 1982-100A,D,E 1413 1414 1415 I 2 3 B 2 1983-84A,B,C 1490 1491 1492 4 5 6 B 3 1983-127A,B,C 1519 1520 1521 7 8 9 A 4 1984-41A,B,C 1554 1555 1556 10 11 12 A 5 1984-95A,B,C 1593 1594 1595 13 14 15 B 6 1985-37A,B,C 1650 1651 1652 16 17 18 B 7 1985-118A,B,C 1710 1711 1712 19 20 21 A 8 1986-71A,B,C 1778 1779 1780 22 23 24 B 9 1987-36A,B,C 1838 1839 1840 25 26 27 A*
10 1987-79A,B,C 1883 1884 1885 28 29 30 A 11 1988-9A 1917 1918 1919 31 32 33 B* 12 1988-43A,B,C 1946 1947 1948 34 35 36 B 13 1989-1A,B,C 1987 1988 1989 40 41 t B 14 1989-39A,B,C 2022 2023 2024 42 43 t A
*Failed to achieve final orbit. tEtalon passive laser ranging satellite.
achieved the said stable orbit; the third satellite remained in an orbit without ground-track repeat and was not observed to transmit. Since then launches 8-13 (with the exception of failed launches 9 and 11) resulted in a stable orbit for all three satellites, which have also transmitted full navigation messages and can therefore be regarded as fully-fledged members of the pre-operational system. The most recent launches 14 and 15 have placed two GLONASS satellites into stable orbit.
It is also a normal feature of the present system for a launch to occur only when the number of function- ing satellites has fallen or is about to fall below the number required for adequate testing of the system. This number cannot be stated with absolute precision since it depends on the orbital planes of the remaining satellites. However, a reduction of available units to any number less than four is likely to act as a precursor to a new launch.
In contrast with GLONASS launches which place three satellites at once into orbit, launches of Navstar GPS take place one at a time. There are to be three phases in the development of the Navstar GPS space segment. The first pre-operational phase incorpor- ated Block I satellites and terminated at the end of 1988. The operational phase satellites (Block II) began to be launched in 1989 and currently two of these satellites are operating. The Block II phase will continue until full operation in the mid 1990s. Block III satellites are still in the design phase and are planned for launch in the late 1990s.
Commitment to Space Shuttle launches of the first Block II satellites led to difficulties following the Challenger accident early in 1985. In fact the lack of alternative means of launching Navstar GPS led to a delay of more than 3 years between the launch of the last of the Block I satellites and the first of the Block II satellites (by Delta II launcher) early in 1989. As explained there are 6 Navstar GPS launch planes known as A-F separated by 60 °. All Block I satellites were launched with nominal inclination of 63 ° into launch planes A and C. A summary of Navstar GPS launches is included in Table 2.

Navstar GPS and GLONASS
Table 2. Navstar GPS launches: Status---June 1989
Launch PRN Block Designator Plane
NDS 1 4 NDS 2 7 NDS 3 6 NDS 4 8 NDS 5 5 NDS 6 9 NDS 7 * NDS 8 11 NDS 9 13 NDS 10 12 NDS 11 3 NDS 12 i" NDS 14 14 NDS 15 2
1978-20A C 1978-47A A 1978-93A A 1978-112A C 1980-11A C 1980-32A A 1981- 1983-72A C 1984-59A C 1984-97A A 1985-93A C
II II-1 1989-13A E II-2 1989-44A B
*Launch failure. tPre-launch hardware failure.
401
ellipsoid to describe the shape of the Earth. It is at present unclear what the precise relationships between reference ellipsoids and between WGS-84 and SGS-85 are; this question itself could be resolved by correlation of signals from satellites of both types at several Earth locations.
Traditionally nations have described geographical locations within their own boundaries in terms of local coordinate systems, e.g. the European Datum of 1950 (ED50) or the OSGB70 employed in the U.K. Reference of these various datums to WGS-84 or SGS-85 represents a problem which might be circum- vented by direct use of one of the two geodetic reference frames.
Accuracy of the time interval measurement 4. METHODOLOGY OF SATELLITE NAVIGATION
The aim of both Navstar GPS and GLONASS is to provide high-precision position-fixing and time- reference capability on a world-wide and continuous basis to users on the Earth's surface, on land and at sea, in the air and also in space itself. Under the control of highly-stable, on-board frequency references (clocks), timing signals (epochs) and data are transmitted simultaneously from a number of satellites. The transmitted data includes a precise ephemeris for each satellite which allows its position and velocity at a given time to be computed. In addition each satellite provides information on the behaviour of its own on-board clock. The observer makes time-of-arrival measurements to three satellites at the same time using the received data to compute the position of the satellites. Given a synchronized ground time reference, the observer can then in principle solve three range equations for three un- known position coordinates. In practice, the observer will not normally have synchronized time reference and will therefore choose to "pseudo-range" to four satellites instead of three, using the fourth measure- ment to compute the instantaneous time error.
Users of satellite navigation have the option to make measurements at the level of code phase or to enhance this with integration of doppler frequency for averaging purposes or when in motion. In ad- dition the user may have access to carrier phase which allows extremely accurate relative position-fixing when used [6] in the differential mode. This particular method is of great use to the surveying community. In addition, a technique known as kinematic posi- tioning has been derived [7] based on the notion of relative positioning between two observers one of which is in motion, continuous or in steps.
Originally, the Navstar GPS system used a descrip- tion of the Earth based on the World Geodetic System Earth-centred Earth-fixed (ECEF) reference frame of 1972 (WGS-72)--later updated to WGS-84. The Soviet Union's primary reference frame is a geocentric coordinate system produced in 1985 (SGS- 85). Both frames use rectangular coordinates with origin at the centre of the Earth and a reference
In determining the accuracy with which time or its equivalent pseudo-range can be measured, it is important to remember that three different quantities are available; (i) code phase, (ii) integrated code frequency or (iii) carrier phase proceeding to higher and higher accuracies at each stage. In crude terms one can measure code phase meaining the time interval between local and transmitted code epochs to an accuracy limited by the code frequency, the signal/noise ratio and the bandwidth of the measure- ment. Ultimately, if all satellite on-board frequency sources are locked to the same frequency standard, the accuracy available is limited by the stability of that standard. In the case where on-board standards are synchronized atomic clocks, range and hence position can be established to a fraction of a wavelength at the carrier frequency. At L-band frequencies of 1.6 GHz, the free-space wavelength is around !9 cm.
Dual role of global satellite navigation systems
The primary justification for the provision of a global, continuous and precise satellite navigation system is military in that national governments will only allocate the enormous financial resources required to implement such a system on the grounds of defence and national security. However, as has already been seen in the case of Transit and Cicada, a role for civil use of the systems available has also been deemed acceptable. Both Navstar GPS and GLONASS therefore offer a navigation facility available to the military and civil user [8].
Selective availability
Both satellite navigation systems are designed to provide the user with accurate positioning and tim- ing. In fact, the GLONASS description [3] provided at Montreal by the Soviet delegate specifies the accuracy as 100m in plane coordinates, 150 m in altitude, 15 cm/s in velocity and 1/~s in timing. Similar conservative estimates would also be appro- priate for Navstar GPS. It is clear however that, in practice, it is quite feasible to achieve a higher accuracies than those quoted.

402 P. DALY
It has been the expressed intention of the U.S. authorities to deliberately degrade the available accuracy to the user probably by corrupting the data message or by reducing the performance capability of the time standards. This "selective availability" would apply to all non-authorized users and would clearly limit the performance available to the ordi- nary user. No official pronouncement on this subject has been made by Soviet authorities with regard to GLONASS and, at present, it is simply not known whether such restrictions are practiced or intended.
5. ORBITAL C O N S I D E R A T I O N S
For a given number of satellites in the final operational system, the choice of orbital planes and phases within the plane is constrained to ensure visibility of four well-located satellites on a continu- ous global basis. A common approach is to adopt a small number (3 or 6) equally-separated inclined orbital planes with a number of satellites distributed equally in phase around each plane and with an offset in phase between planes. It is also possible to augment this approach with a number of satellites in the geostationary arc.
Orbital plans and current occupation
Two important changes have taken place with regard to the original plans for Navstar GPS orbits. The original intention to employ 3 orbital planes separated by 120 ° and with 8 satellites in each plane has been changed to a 6-plane orbit with upto 4 satellites in each plane. The second alteration has been to the orbital period so as to remove the ground-track repeat every second orbit as this procedure resulted in the necessity to conduct station- keeping manoeuvres too often. As a result all current and future launches foresee an orbital period which produces a drift in longitude of around 1 deg/day. Figure 1 shows the occupation (1 May 1989) of space by Navstar satellites in planes A - F separated by 60 °
in Right Ascension of the Ascending Node (RAAN). At this time only planes A, C and E had been occupied.
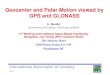
The GLONASS satellite navigation system foresees[9] an operational configuration of 24 satellites with 8 satellites in each of 3 orbital planes separated bt 120 degrees in RAAN. The situation as of 1 May 1989 is shown in Fig. 2 showing a separation in argument of latitude or orbital phase in the plane of 45 °. There is also a displacement of + 30 ° and - 3 0 ° for satellites in planes 2 and 3 respectively with reference to plane 1. This nomenclature follows that assumed by the GLONASS almanac format. It differs from that of Table ! where, in the absence of any prior information, the letters A-C were provisionally ascribed in 1985 to the orbital planes. The relationship between the two descriptions is very simple. Plane A corresponds to plane 3, plane B to plane 1 and plane C to plane 2. Relative positions of satellites remain very stable over long periods because they have very much the same, small rates of change of RAAN amounting to about -0 .03 deg/day for near-circular GLONASS orbits.
All satellites have the same nominal orbital period of 675.73 ° with longitude change of 169.41 ° W each orbit. This orbit produces a ground-track repeat every 17 orbits lasting 8 whole days less 32.56rain. This diurnal offset of AT = 4.07 min from a full 24-h day coincides with that of Navstar GPS and is very nearly the difference between a solar and sidereal day (3.93 min). This implies that each complete day less ATmin a satellite performs 17/8 orbits or 2 whole revolutions plus an additional 1/8 revolution, equiv- alent to 45 ° . It follows that two satellites in the same plane but separated by 45 ° in orbital phase, appear at precisely the same position on successive days less AT rain. During that interval, the Earth has rotated very nearly 360 ° with the result that the ground-based observer sees both satellites at the same pointing azimuth and elevation. Over a ground track repeat interval of 8 days then, all satellites in the same plane
180 140 100
~ 2o
-~ - 2o
~ - 6O
-I00 -140
-180
40
Plane C Plane E PLane A
PRN09 PRN08 / PRN12 ~1k~67 ° R ight , /'h ~° /
I I I I I a s c e n s i o n 280 320 (deg) 80 /,o 120 160 20~,," 240 360 PRN11 / /
PRN13
PRN03 / o PRN14
Fig. 1. Active Navstar GPS satellites (1 May 1989).

Navstar GPS and GLONASS 403
"D w
2, =
'S
E
180
140
100
60
20
-20
-60
-100
- 140
-180
PLane 3
,/ GL39
I 120
PLane 1 PLane 2
GL40
64p80 GL41
I I I 160~ 200 240 283~ / 320
GL35 /
GL34
GL36
I Right 360 ascension
(deg)
• Active satellites (1-5-89) 0 Inactive or vacant position
Fig. 2. GLONASS operational satellite configuration.
with separation of 45 ° appear in turn at the same position at intervals of 1 day less ATmin. After 8 days, the whole cycle naturally repeats.
By examining the phases of satellites in the planes 2 and 3, it becomes apparent that these satellites will also appear at the same position as the reference satellite in plane 1 within the same 8-day period. This arises because the time taken by the Earth to rotate through the angle 120 ° separating planes ! and 2 is the same time taken by a satellite in that plane with phase +225 ° to travel round to the same position as the reference satellite. The Earth rotates through 120 ° in 478.69 rain, very nearly 8 h, which corresponds almost exactly to 17/24 of a GLONASS orbit or +225 °. The same argument holds for plane 3 at 240 ° separation for a satellite at phase + 150 ° (or twice +225 less 360°). The angular separation of 45 ° within the plane together with the angular phase differences of + 30 ° between planes assures that in an 8-day period, all 24 satellites will pass through the position with the reference sub-satellite location.
6. COMMUNICATIONS FROM GLONASS/NAVSTAR GPS
For the purposes of allowing the user to compute his own position, navigation satellites transmit details of their own positions and a time reference. In systems such as GLONASS and Navstar GPS whose purpose is primarily military, the user is expected to play a passive role as any transmissions to a satellite might identify his position to an adversary. Similarly, the navigation message is protected against deliberate jamming by the use of spread-spectrum codes which increases the bandwidth occupied by the signal and hence that of the intending jammer. It should be clear however that even were the system design to be exclusively for civil purposes, it is likely that spread- spectrum would still be used for two reasons (i) so as to minimize interference to others and (ii) to provide
sufficient bandwidth and hence definition of the epoch timing edge. In the following discussion the structure of the navigation message from global navigation satellites to the user will be treated.
Radio-frequency transmissions
The transmission carrier frequencies chosen for the new satellite navigation systems lie in L-band, around 1250 MHz (L2) and 1600 MHz (LI). Dual-frequency navigation messages at L1 and L2 allow the user to correct for ionospheric propagation effects and are incorporated into both Navstar and GLONASS. A high-precision spread-spectrum code is modulated onto both carriers whereas the lower-precision civil code only appears at L1. Spread-spectrum techniques are primarily involved to reduce the effects of deliber- ate jamming of signals.
Radio-frequency carriers used by GLONASS are channelised within the bands 1240-1260MHz and 1597-1617 MHz, the channel spacing being 7/16 or 0.4375 MHz at the lower frequencies and 9/16 or 0.5625 MHz at the higher frequencies. The carrier frequencies themselves are also multiples of channel spacing and the number of planned channels is 24.
GLONASS LI transmit carrier frequencies and channel numbers (GL and CHN) are presented in Table 3 (corresponding frequencies at L2 are in the ratio 7/9). All of these frequencies were measured at the University of Leeds with the exception of that of GLONASS 5 which was obtained at the Haystacks Laboratory in the U.S.A.
In stark contrast to the radio-frequency transmission system chosen for GLONASS which is FDM (frequency-division-multiplex), Navstar GPS uses the same carrier frequency for all satellites and distinguished one from another by the use of different spread-spectrum Gold codes, a form of CDM (code- division-multiplex). This difference between the two

404 P. DALY
Table 3. G L O N A S S frequencies
S A T - I D Cosmos G L C H N LI (MHz)
1982-100A 1413 1 * * 1982-100D 1414 2 * * 1982-100E 1415 3 * *
1983-84A 1490 4 3 1603.6875 1983-84B 1491 5 I 1602.5625 1983-84C 1492 6 * *
1983-127A 1519 7 2 1603.1250 1983-127B 1520 8 24 1615.5000 1983-127C 1521 9 * *
1984-47A 1554 10 9 1607.0625 1984-47B 1555 11 18 1612.1250 1984-47C 1556 12 * *
1984-95A 1593 13 * * 1984-95B 1594 14 * * 1984-95C 1595 15 17 1611.5625
1985-37A 1650 16 7 1605.9375 1985-37B 1651 17 10 1607.6250 1985-37C 1652 18 * *
1985-118A 1710 19 4 1604.2500 1985-118B 1711 20 19 1612.6875 1985-118C 1712 21 * *
1986-71A 1778 22 11 1608.1875 1986-71B 1779 23 20 1613.2500 1986-71C 1780 24 22 1614.3750
1987-79A 1883 28 14 1609.8750 1987-79B 1884 29 21 1613.8125 1987-79C 1885 30 5 1604.8125
1988-43A 1946 34 12 1608.7500 1988-43B 1947 35 23 1614.9375 1988-43C 1948 36 24 1615.5000
1988-85A 1970 37 18 1612.1250 1988-85B 1971 38 7 1605.9375 1988-85C 1972 39 10 1607.6250
1989-1A 1987 40 9 1607.0625 1989-1B 1988 41 6 1605.3750
1989-39A 2022 42 16 1610.4375 1989-39B 2023 43 17 1611.0000
*Not yet observed.
systems is of major significance in designing receivers capable of joint operation.
operation applied at the transmitter. This implies a knowledge of the PRN codes on the part of the receiver.
The code rate can be seen from the figures already given to be 511 and 1023kbits/s for the civil GLONASS and Navstar codes respectively. Military codes are at 10 times these rates and of course the sequence lengths are very much longer. In order to transmit the encoded data, a binary phase-shift keyed (BPSK) modulation technique is employed, the first nulls in the transmitted spectrum at + / - the bit rate. Hence, bandwidths for the GLONASS transmission can be taken at 1 and 10MHz for the civil and military codes respectively. These figures compare with 2 and 20MHz for Navstar's equivalent bandwidths.
At the L2 frequency only the high-rate code is carried but at L1 both codes are transmitted on the same carrier, one in-phase and the other in-quadra- ture. This results in a signal spectrum which superimposes the two individual spectra whose bandwidths differ by factor of ten. Since both transmissions carry the same power, the spectrum will display the narrower-band code at 10 times the strength of the wide-band code.
Data message
The data carried on transmissions from satellites is low bit-rate at 50 baud essentially providing accurate positions for the transmitting satellite as well as information on its on-board frequency standard. In addition data is given in the form of low-precision almanacs of all the other satellites currently available so as to allow the user to plan usage and to assist with signal acquisition. Data is sent in lines, subframes and frames with preambles at the start and parity checks at the end of each line. The reader is referred elsewhere for details [2-4, 10].
Information transmission, bandwidth and code rates
As explained in a previous section, each satellite sends data at low-speed from which its own position at any reference time may be calculated. This data commonly sent at a 50-baud rate is superimposed on a pseudo-random noise (PRN) code which is, in fact, periodic and very much longer than a single data bit. The GLONASS low-precision code has length 511 bits as compared to Navstar's 1023 bits for its equivalent code. A code sequence lasts only 1 ms so that each data bit occupies 20 entire code sequences, the code itself or its inverse being sent depending on whether the data bit is a "0" or a " I" . In this manner, the information spectrum is spread across a wide bandwidth since bandwidth is determined by the most rapid change of state in the message. On the assumption that, in transmission, the signal will be corrupted by Gaussian noise whose power level is proportional to bandwidth, then the signal will be- come immersed in the noise at the receiver's terminal and recoverable only by reversing the coding
Satellite ephemerides
The Navstar GPS ephemeris data describes a Kepler ellipse with additional corrections which then allow the satellite's position to be calculated in an ECEF set of rectangular coordinates at any time during the period of validity of the data. In the GLONASS system, the satellite's instantaneous position and velocity is encoded at fixed time intervals (usually half-an-hour) in an ECEF rectangular coordinate system. Positions and velocities at intermediate times are intended to be calculated using interpolation procedures and acceleration terms provided.
As far as timing is concerned the global navigation satellites transmit satellite clock corrections to a notional system time and, in addition, corrections from system time to a national time reference. Navstar GPS represents satellite clock behaviour in terms of a clock offset (a0) and frequency offset (al) and the rate of change of frequency (a2). Navstar GPS system time from Universal Coordinated Time

Navstar GPS and GLONASS 405
at the U.S. Naval Observatory, UTC(USNO), is given as A0 and its first derivative as A~. In contrast GLONASS only transmits in the ephemeris two parameters relating to the on-board clocks, a0 and a~. The first time offset refers to the instantaneous time difference between space vehicle time and GLONASS system time. The second parameter gives the rate of change of space vehicle time offset. Use of both parameters allows the user to establish individ- ual space vehicle time offsets at any required instant of observation. Reference of GLONASS system time to Moscow Time is by a single time offset parameter--A0.
Satellite almanacs
There is greater similarity between Navstar and GLONASS in the transmission of almanacs. Both systems transmit the basic elements of an osculating Kepler elipse as shown in Table 4.
In terms of using almanacs to predict satellite position from the reduced Kepler orbit, the two sets of data are quite similar as one would expect.
Formally one would expect the primary purpose of almanac data to be to allow the user to predict in fairly crude terms which satellites are above his local horizon at a given time and whether their geometry is favourable for navigation. This end would be achieved by almanacs giving a position of each satellite to within 100--200 m and is the case with the Navstar almanac. However, the inclusion in the GLONASS almanac of a luni-solar correction term implies a position error perhaps an order of magnitude better than a Navstar almanac. The lunisolar term remains substantially constant for satellites with the same Right Ascension. The purpose of the inclusion of such a term might possibly be in order to aid satellite acquisition following a "cold start" but clearly other interpretations are also possible.
Almanacs are valid for several days in the case of Navstar; they are usually but not always changed every day in GLONASS at local midnight. It is interesting to observe that the GLONASS almanacs differ from the earlier Cicada almanacs in one major respect--the earlier almanacs were based on an equinoctial Kepler set where eccentricity and
Table 4. Satellite almanacs
Navstar GLONASS
Week of validity Day of validity Identifier Channel number Eccentricity Eccentricity Inclination Inclination Time of almanac Equator time Health Validity of almanac Right ascension (RA) Equator longitude Rate of change of RA Root of semi-major axis Orbital period Argument of perigee Argument of perigee Mean anomaly - - Luni-solar term Time offset Time offset Frequency offset
argument of the perigee are transmitted as h = e x sin co and 1 = e + cos ¢o. The equinoctial set of elements is suitable for orbits with small eccentric- ity since it leads to equations with no singularities when e tends to zero.
7. INTEGRATION OF NAVSTAR GPS AND GLONASS
As of mid-1989 both the Navstar GPS and GLONASS satellite systems are clearly still in a pre-operational phase although the number of satellites currently in space is steadily increasing. At the beginning of May 1989 GLONASS had eight satellites transmitting useful navigation signals, three in plane A (plane 3) and five in plane B (plane 1). As we have already commented, the Navstar GPS orbital plan consists of six orbital planes. The block I satellites occupied two planes separated by 120 °. Two block II satellites have now been launched into previously unused planes 180 ° apart. When the most recently launched Navstar satellite (1989- 44A) comes into service in the near future, there will be eight satellites fully active in the system. By the mid-1990s both Navstar GPS and GLONASS are expected to be fully operational each with a constellation of between 21 and 24 satellites.
Integration of the two systems depends on compat- ibility in space, control and user segments. The space segment as has been discussed is the least likely to produce difficulties in integration as there is a large degree of orbit compatibility and more than enough available spacecraft to provide global coverage on a continuous basis. The performance of space hardware and its reliability still raises questions which must be addressed.
The Navstar GPS control segment consists of a Master Control Station (MCS) in Colarado, U.S.A. with four support monitoring stations with uplink capability at Diego Garcia, Kwajalein, Ascension and Hawaii spaced at 90 ° intervals of longitude and all close to the equator. This clearly allows continuous monitoring of Navstar satellites with the expectancy of accurate orbits at all times. The GLONASS system currently has the drawback of lack of global control of satellites since most (if not all) monitoring stations are within the Soviet Union itself.
In incorporating measurements of pseudo-range from either satellite system to produce position or time outputs there are still problems to be resolved, the first of which refers to the timer reference of the two systems. Navstar GPS is referenced firstly to Navstar system time and then to UTC(USNO).
Similarly GLONASS is referenced to GLONASS system time and then to Moscow Time. A common time reference is clearly necessary for successful integration either at the level of system time or international time, UTC. The latter choice would of course be mandatory for the purposes of international time transfer via the BIPM in Paris.

406 P. DALY
Some questions remain concerning the position reference ellipsoids used by Navstar GPS and GLONASS. Navstar GPS is referred to the World Geodetic Survey (WGS-84) ellipsoid whereas GLONASS was initially based on the Krasovsky ellipse and later on the Soviet Geocentric Coordinate System 1985 (SGS-85). It is clearly important to discover how these two reference systems relate to one another before attempting integration.
Integration of Navstar GPS and GLONASS remains a distinct possibility from the technical point of view and there are also strong indications of a readiness to seek out a cooperative agreement. Certain differences with respect to position reference elipsoids, timing standards, satellite control, prefor- mance and reliability remain.
REFERENCES
8. CONCLUSIONS
Features of the Navstar GPS and GLONASS satellite navigation system have been discussed which lead to a better understanding of the aims of the two programmes and the current status of the two systems. Initially both systems were planned to occupy three orbital planes separated by 120 ° with eight satellites in each plane. GLONASS satellites have always been launched into one of two planes 120 ° apart but Navstar GPS has broken away from this initial concept now aiming for planes at 60 ° spacing. As we have seen, the two most recent Navstar GPS launches have occupied new planes within the new system. Currently Navstar GPS and GLONASS both have around 8 operational satellites which represents a maximum since launches began. The acceleration in launches towards full operation in 1995 has clearly begun and we may expect several hours of daily coverage from both systems very soon.
The full operational phase of these new global, 24-h continuous satellite navigation systems has the potential to offer the international community unprecedented position-fixing capability either or the basis of a single user or in differential mode. In addition international time transfer is likely to be coordinated using navigation satellites and achieving a correlation between time standards in different countries at the level of a few nanoseconds.
I. G. B. Green, P. D. Massatt and N. W. Rhodus, The GPS 21 primary satellite constellation. Institute of Navigation (U.S.) Proceedings of the Satellite Division's International Technical Meeting, Colorado Springs, pp. 15-26 (1988).
2. Institute of Navigation (U.S.), Special Issue; Global Positioning System. Navigation summer (1978).
3. T. G. Anodina, Working Paper. Global positioning system GLONASS. Special Committee on Future Air Navigation Systems (FANS/4). ICAO, Montreal (1988).
4. s. A. Dale, P. Daly and I. D. Kitching, Understanding signals from GLONASS satellites. Int. J. Satellite Commun. 17, 11-22 (1989).
5. S. A. Dale and P. Daly, Recent observations on the Soviet Union's GLONASS navigation satellites. IEEE PLANS'86 (Position Location & Navigation Symposium), Las Vegas, pp. 20-25 (1986).
6. E. G. Blackweli, Institute of Navigation (U.S.). Overview of differential GPS methods. Navigation 32, 114-125 (1985).
7. B. W. Remondi, Kinematic and pseudo-kinematic GPS. Institute of Navigation (U.S.) Proceedings of the Satellite Divisions's International Technical Meeting, pp. 115-128 (1988).
8. S. A. Dale, I. D. Kitching and P. Daly, Position-fixing using the USSR's GLONASS C/A code. IEEE PLANS'88, Orlando, pp. 13-20 (1988).
9. P. Daly, Aspects of the Soviet Union's GLONASS satellite navigation system. J. Navig. 41, 186-197 (1988).
10. S. A, Dale and P. Daly, Developments in interpretation of the GLONASS navigation satellite data structure. IEEE NAECON'8& Dayton, Ohio, pp. 292-297 (1988).