Embed Size (px)
Citation preview

Navigation in Robotic
Radiosurgery
Achim Schweikard

beam
Stereotactic Radiosurgery


Conventional Procedure

Stereotaxic Frame

Arc motion

Local Anesthesia

Concept

Image-Guidance
Camera A Camera B
BKS
LCS
Source B Source A
T

Robot System

Robot System

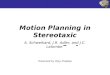
Tumors in the chest or abdomen move due to respiration

Respiratory Motion

Respriatory Motion

Safety Margin
Tumor



Beam

Robotic Arm

Robotic Arm

Volume of Sphere:
4/3 r3

Hysteresis

Previous Work
HD Kubo, BC Hill: Respiration gated radiotherapy treatment: a technical study. Phys. Med. Biol. 1996; 41: 83-91.
T Tada et. al.:Lung cancer: Intermittent radiation synchronized with respiratory motion. Radiology, 1998; 207:779-783.
MR Sonntag, ZW Lai: Characterization of respiratory motion for pediatric conformal 3D therapy. Med. Phys. 1996: 23: 1082.

Image-Guidance
Camera A Camera B
BKS
LCS
Source B Source A
T

Stereo X-Ray Camera System
Camera A Camera B
Gold fiducial

Infrared Tracking

Correlation

Correlation

DART

System Overview

Correlation external chest vs. external abdomen

Motion Table Phantom Study(Overall Accuracy)

Robot Tracking

Prediction

Phantom Study

First Patient Treatment

Measured Target Excursionvs. Correlation Error

Follow-up Study

Four months follow-up

Treatment


Synchrony

Major Challenges
Fiducial-less tracking

Implanting of Gold Fiducials

Respiration
Courtesy Paul Sellars, JHU

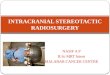
Fiducial-Less Tracking: Principle
Compute or acquire 4D CT

Principle
Compute or acquire 4D CT
Compute DRRs (2D Projections)

Principle
Compute or acquire 4D CT
Compute DRRs (2D Projections)
Live Shots (2D x-ray pair)

Principle
Compute or acquire 4D CT
Compute DRRs (2D Projections)
Live Shots (2D x-ray pair)
Find the DRR that best matches live shots

Principle
„Ground truth“

Principle
i.e. Tumor position with time stamp

Principle
Thus: same ground truth information as in fiducial-based tracking is available

Principle
Correlation + Prediction
real-time target position

Principle
CT-ScanInhalation
CT-ScanExhalation
IntermediateCT-Scan 1
IntermediateCT-Scan n...
„4D CT“
Best match determines respiratory state and therefore tumor position

Results Registration
Implementation Uses Intensity-based rigid registration 2D/3D Optimization with the Hooke-Jeeves Pattern-
Search Uses hardware-accelerated volume-rendering
based on texture mapping as DRR generation technique
Used metrics are correlation coefficient and mutual information

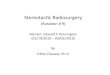
Results 7D RegistrationRegistration results with DRRs from synth. scan 40 % inhaled
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
CT Scans (real and synthetic)
MI
Val
ues

Results 7D RegistrationRegistration results with DRRs from original scan max. inhaled
0,00
0,20
0,40
0,60
0,80
1,00
1,20
CT Scans (real and synthetic)
MI
Val
ues

Results single 2D/3D Registration

Computing time
10 seconds per registration

Conclusion
Feasible w.r.t. computing time
Feasibility w.r.t accuracy and reliability not yet established