-
7/29/2019 Navbelt and guide cane
1/16
1
ACKNOWLEDGEMENT
I express my gratitude to our institution NALLA MALLA REDDY
ENGINEERING
COLLEGE, and our beloved principal Dr. Divya Nalla for providing
me the means of attaining
most cherished goals.
I extend my sincere gratitude towards Prof. Ram Chandra Head of
Department
Electronics And Communication Engineering for giving me the
opportunity to present this
technical seminar.
I express my gratitude to Mr. Mahesh sir for his kind
co-operation and guidance for
preparing and presenting this seminar.
I also thank all the other faculty members of ECE department and
my friends for their
help and support.
-
7/29/2019 Navbelt and guide cane
2/16
2
ABSTRACT
Recent evolutionary achievements in robotics and bioengineering
have given scientists
and engineers great opportunities and challenges to serve
humanity. With the development of
radar and ultrasonic technologies over the past four decades,
when combined with the robotic
technology and bioengineering, gave rise to new series of
devices, known as electronic travel
aids (ETAs). It operates similar to a radar system, sends a
laser or an ultrasonic beam, which
after striking the object reflects back and is detected by the
sensors, and so the corresponding
distance from the object is calculated. In particular, these
devices are used to help people organ
failure and people with disabilities, such as visual impairment,
deafness etc. This seminar is
about an instrument, which is the outcome of robotics and
bioengineering, and it is called
NavBelt and the GuideCane. It is a robotics-based
obstacle-avoidance system for the blind and
visually impaired.
NavBelt is worn by the user like a belt and is equipped with an
array of ultrasonic
sensors. It provides acoustic signals via a set of stereo
earphones that guide the user aroundobstacles or displays a virtual
acoustic panoramic image of the travellers surroundings. One
limitation of the NavBelt is that it is exceedingly difficult
for the user to comprehend the
guidance signals in time to allow fast walking.
A newer device, called GuideCane, effectively overcomes the
above problem faced by
the use of NavBelt. The GuideCane uses the same mobile robotics
technology as the NavBelt but
is a wheeled device pushed ahead of the user via an attached
cane. When the GuideCane detects
an obstacle, it steers around it. The user immediately feels
this steering action and can follow the
GuideCanes new path easily without any conscious effort.
-
7/29/2019 Navbelt and guide cane
3/16
3
CONTENTS
1. INTRODUCTION 04
2. NAV BELT 05
OPERATIONAL MODES 08
ADVANTAGES DISADVANTAGES 08
IMPROVEMENTS
3. GUIDE CANE
FUNCTIONAL DESCRIPTION 08
HARDWARE IMPLEMENTATION 10
MC68HC11 12
ADVANTAGES 14 DISADVANTAGES 14
IMPROVEMENTS 14
4. CONCLUSION 15
5. REFERENCES 16
-
7/29/2019 Navbelt and guide cane
4/16
4
INTRODUCTION
Recent revolutionary achievements in robotics and bioengineering
have given scientists and
engineers great opportunities and challenges to serve humanity.
This seminar is about
NAVBELT AND GUIDECANE, which are two computerized devices based
on advanced mobile
robotic navigation for obstacle avoidance useful for visually
impaired people. This is
Bioengineering forpeople with disabilities. NavBelt is worn by
the user like a belt and is equipped with
an array of ultrasonic sensors. It provides acoustic signals via
a set of stereo earphones that guide the
user around obstacles or displace a virtual acoustic panoramic
image of the travellers surroundings.
One limitation of the NavBelt is that it is exceedingly
difficult for the user to comprehend the
guidance signals in time, to allow fast work. A newer device,
called GuideCane, effectively overcomes
this problem. The GuideCane uses the same mobile robotics
technology as the NavBelt but is a wheeled
device pushed ahead of the user via an attached cane. When the
Guide Cane detects an obstacle, it steers
around it. The user immediately feels this steering action and
can follow the Guide Canes new patheasily without any conscious
effort. The mechanical, electrical and software components,
user-machine
interface and the prototypes of the two devices are described
below.
-
7/29/2019 Navbelt and guide cane
5/16
5
NAV BELT
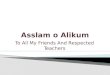
The NavBelt consists of a belt, a portable computer, and an
array of ultrasonic sensors
mounted on the front of the belt. Eight ultrasonic sensors, each
covering a sector of 15 are
mounted on the front pack, providing a total scan range of
120.The computer processes the
signals that arrive from the sensors and applies the robotic
obstacle-avoidance algorithms.The acoustic signals are relayed to
the user by stereophonic headphones. Figure (1),
shows the experimental prototype of the device and pictorial
representation of its concept.
FIGURE 1
A binaural feedback system based on internal time difference
(i.e. the phase difference betweenthe left and right ears) and
amplitude difference (i.e. the difference in amplitude between the
two
-
7/29/2019 Navbelt and guide cane
6/16
6
ears) creates a virtual direction (i.e. an impression of
directionality of virtual sound sources). The
binaural feedback system is used differently in each of the
three operational modes.
OPERATIONAL MODES: - The NavBelt is designed for three basic
operational modes,
each offering a different type of assistance to the user.
Guidance Mode: -
In the guidance mode, the NavBelt only provides the user with
the recommendedtravel speed and direction, generated by the VFH
obstacle-avoidance algorithm. In this
mode, the system attempts to bring the user to a specified
absolute target location. The VFH
(Vector Field Histogram) method calculates its recommendation
for the momentary traveldirection from the polar histogram by
searching for sectors with a low obstacle density value.
Next, the VFH algorithm searches for the candidate sector that
is nearest to the direction of the
target and recommends it to the user. The recommended travel
speed is determined by the VFH
method according to the proximity of the user to the nearest
object. The recommended travel
speed and direction are relayed to the user by a single
stereophonic signal. An importantparameter involved in the guidance
mode is the rate at which signals are transmitted. When the
user is travelling in an unfamiliar environment cluttered with a
large number of obstacles,the transmission rate increases and may
reach up to 10 signals per second. On the other hand,
when travelling in an environment with little or no obstacles,
the transmission rate is one signal
every three second.
Directional-Guidance Mode: -
In this mode, the traveller uses a joystick or other suitable
input devices to define a
temporary target direction as follows - when the joystick is in
its neutral position, the systemselects a default direction
straight ahead of the user no matter which may the user is facing.
If the
user wishes to turn sideways, he/she deflects the joystick in
the desired direction, and a
momentary target is selected 5-mt. diagonally ahead of the user
in that direction. In case an
obstacle is detected, the NavBelt provides the user with
relevant information to avoid theobstacle with minimal deviation
from the target direction. The recommended travel speed and
direction are conveyed to the user through a single stereophonic
signal, similar to the method
used in the guidance mode. This mode gives the user more control
over the global aspects of thenavigation task.
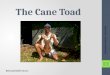
Image Mode: -This mode presents the user with a panoramic
virtual acoustic image of the environment.
A virtual acoustic image is a stereophonic sound that appears to
travel through the users headfrom the right to the left ear. A
virtual beam travels from the right side of the user to the
left
through the sectors covered by the NavBelts sonars (a range of
120 and 3-mt radius). Thebinaural feedback system invokes the
impression of a virtual sound source moving with the beam
from the right to the left ear in what we call a sweep. This is
done in several discrete steps,
corresponding to the discrete virtual direction steps. Figure
(2) shows the graphical
representation of the image mode.
-
7/29/2019 Navbelt and guide cane
7/16
7
Figure 2
a) Obstacles are detected by ultrasonic sensorsb) Sonar range
readings are projected on to the polar histogramc) An acoustic
sweep is generated from the polar histogram
At each step, the amplitude of the signal is set proportionally
to the distance of the obstacle in
that virtual direction. If no obstacles are in a given virtual
direction, the virtual sound source is of
a low amplitude and barely audible. Otherwise, the amplitude of
the virtual sound source is
larger. One of the important feature of the image mode is the
Acoustic Directional Intensity(ADI), which is directly derived from
the polar histogram. The virtual direction of the ADI
provides information about the source of the auditory signal in
space, indicating the location of
an object. The intensity of the signals is proportional to the
size of the object and its distancefrom the person as derived from
the polar histogram. The ADI is a combination of the signal
duration Ts, the amplitude A, and the pitch.
-
7/29/2019 Navbelt and guide cane
8/16
8
ADVANTAGES1. NavBelt can detect objects as narrow as 10mm.2.
NavBelt can reliably detect objects with a diameter of 10cm or
more,
regardless of the travel speed.
3. The current detection range of the NavBelt is set for
3mt.
DISADVANTAGES
1. For object with diameter of 10mm, the detection is possible
if the objects are stationaryor the subject is walking slowly (less
than 0.4 m/s).
2. NavBelt lacked the ability to detect overhanging objects,
steps, sidewalks, edges etc.This can be removed by addition of
Sonars pointing up and down to detect these types of
obstacles.3. It does not allow fast-motion.4.
The NavBelt uses a 2-D representation of the environment. The
representation of this typebecomes unsafe when travelling near
overhanging object or approaching bumps and holes.
The above disadvantage can be removed by substantial
modifications to the obstacle-
avoidance algorithm and to the auditory interface.
IMPROVEMENTS
The Nav Belt is currently not able to detect over hanging
objects. This problem can beremoved by using a camera and a laser
scanner attached to a special helmet, which can detect
objects according to the users head orientation. Adding more
sonars to the front pack of the Nav
Belt (pointing upwards and downwards) can provide additional
information.
GUIDE CANE
It can be thought of as a robotic guide dog. The functional
components of the GUIDECANE are shown in the figure. A servomotor,
operating under the control of the built-in
computer, can steer the wheels left and right relative to the
cane. Both wheels are equipped
with encoders to determine their relative position. For obstacle
detection, the GuideCane isequipped with ten ultrasonic sensors,
and to specify a desired direction of motion, the user
operates a mini joystick located at the handle. Based on the
user input and the sensor data from
its sonars and encoders, the computer decides where to head next
and turns the wheels
accordingly.
FUNCTIONAL DESCRIPTION
During operation, the user pushes the GuideCane forward with the
help of a thumb-operated joystick located near the handle. If the
user presses the button forward, the system
considers the current direction of travel to be the desired
direction. If the user presses the button
to the left, the computer adds 90 to the current direction
oftravel and as soon as this direction is
-
7/29/2019 Navbelt and guide cane
9/16
9
free of obstacles, steers the wheels to the left until the 90
left turn is completed. Functional
components are shown in figure (3).
FIGURE 3
While travelling, the ultrasonic sensors detect any obstacles in
a 120 wide sector ahead of the
user. The built-in computer uses the sensor data to
instantaneously determine an
appropriate direction of travel. If an obstacle blocks, the
desired direction of travel theObstacle Avoidance Algorithm
prescribes an alternative direction to circumnavigate the
-
7/29/2019 Navbelt and guide cane
10/16
10
obstacle and then resume in the desired direction. Once the
wheels begin to steer sideways to
avoid the obstacles, the user can feel the resulting horizontal
rotation of the cane; hence, thetraveller changes his/her
orientation to align himself/herself with the cane at the nominal
angle.Once the obstacle is cleared, the wheels steer back to the
original desired direction of
travel, although the new line of travel will be offset from the
original line of travel. The Guide
Cane offers separate solutions for downward and upward steps.
Downward steps are detectedin a fail-safe manner:- when a downward
step is encountered, the wheels of the Guide Cane drop
off the edge until the shock-absorbing bottom hits the step -
without a doubt, a signal that the
user cannot miss. Because the user walks behind the Guide Cane,
he/she has sufficient time tostop. Additional front-facing sonars
can detect upward steps. The Guide Cane analyses the
environment first and then computes the momentary optimal
direction of travel. The
bandwidth of information is much smaller and hence easier and
safer to follow. Figure (3) alsoshows the way GuideCane avoids the
obstacles.
HARDWARE IMPLEMENTATION
Two basic types of hardware used are: -
a) Mechanical hardware, and,
b) Electronic hardware.
a) Mechanical hardware: -
The Guide Cane must be as compact and lightweight as possible so
that user can easily
lift it, e.g., for coping with steps, and for access to public
transportation. For the same reason, theelectronic components
should require minimal power in order to minimize the weight of
the
batteries. The current prototype uses 12AA rechargeable NiMH
batteries that power the system
for two hours. The estimate of the total weight of a
commercially made Guide Cane would be
approximately 2.5 kg. Figure (4) shows the mechanical hardware
of the GuideCane. Itconsists of a housing, a wheelbase and a
handle. The housing contains and protects most of the
electronic components as shown in the figure. The current
prototype is equipped with ten
Polaroid ultrasonic sensors that are located around the housing.
Eight of the sonars are located inthe front in a semicircular
fashion with an angular spacing of 15, thereby covering a 120
sectorahead of the Guide Cane. The other two sonars face directly
sideways and are particularly useful
for following walls and going through narrow openings, such as
doorways. The wheelbase issteered by a small servomotor and
supports two unpowered wheels. Two lightweight quadrature
encoders mounted to the wheels provide data for odometry.
Because the wheels are unpowered,
there is much less risk of wheel slippage. The handle serves as
the main physical interface
between the user and the Guide Cane. The vertical angle of the
handle can be adjusted to
accommodate users of different height. At the level of the users
hand, a joystick-like pointing
device is fixed to the handle. The pointer consists of a mouse
button that the user can press with
his/her thumb in any direction.
b) Electronic hardware: -
-
7/29/2019 Navbelt and guide cane
11/16
11
The electronic system architecture of the Guide Cane is shown in
the figure. The main
brain of the Guide Cane is an embedded PC/104 computer, equipped
with a 486 microprocessorclocked at 33MHz. The PC/104 stack
consists of four layers. Three of the modules are
commercially available, including the motherboard, the Video
Graphics Array (VGA) utility
module, and a miniature 125-MB hard disk. Figure(4) also shows
the electronic hardware.
FIGURE 4: The guide cane system. Dashed lines indicate
components that are required onlyrequired during the development
stage.
The fourth module, which is custom built, serves as the main
interface between the PC
and the sensors (encoders, sonars, and potentiometers) and
actuators (main servo and
-
7/29/2019 Navbelt and guide cane
12/16
12
brakes). The main interface executes many time critical tasks,
such as firing the sonars at
specific times, constantly checking the sonars for an echo,
generating Pulse Width Modulation
(PWM) signals for the servos, and decoding the encoder data. The
fourth module, whichperforms all these tasks, is called the
Microcontroller Interface Board (MCIB). The main
interface is connected to the PCs bi-directional parallel port.
The interface pre-processes most of
the sensor data before the data is read by the PC. In addition,
all communications are buffered.The pre-processing and buffering
not only minimize the communications between the PC and
the interface, but also minimize the computational burden on the
PC to control the
sensors and actuators. The interface consists mainly of three
MC68HC11E2 microcontrollers, two quadrature decoders, a FIFO buffer
and a decoder.
MC68HC11: -MC68HC11 is a powerful 8-bit data, 16-bit address
micro controller from Motorola
with an instruction set. The MC68HC11 has in-built
EEPROM/OTPROM, RAM, digital
I/O, timers, A/D converter, PWM generator and synchronous and
asynchronous communications
channels. Typical current draw is less than 10mA. Figure (5)
shows the connections of
MC68HC11.
FIGURE 5
ARCHITECTURE
-
7/29/2019 Navbelt and guide cane
13/16
13
The MC68HC11 is optimized for low power consumption and
high-performance
operation at but frequencies up to 4 MHz The CPU has two 8-bit
accumulators (A&B) thatcab be concatenated to provide a 16-bit
double accumulator (D). Two 16-bit index
registers are present (X&Y) to provide indexing to anywhere
in the memory map. Although
an 8-bit processor, the 68HC11 is a very good processor and some
16-bit instructions (add,
subtract, 16*16 divide, 8*8 multiply, shift and rotate). A
16-bit stack pointer is also present, andinstructions are provided
for stack manipulation. Typically multiplexed address and data
bus.
Other features include: -
o Powerful bit-manipulation instructions.o Five powerful
addressing modes (Immediate, Extended, Indexed, Inherent and
Relative).
oPower saving STOP and WAIT modes.
o Memory-mapped I/O and special functions.
Serial Communications Interface (SCI): -
The SCI features a full duplex Universal Asynchronous
Receiver/Transmittersystem, using the non-return-to-zero (NRZ)
format for Microcontroller-to-PC connections, or
to form a serial communications network connecting several
widely distributed micro
controllers.
Serial Peripheral Interface (SPI): -
The SPI is capable of inter-processor communication in a- multi
master system. The SPI
also enables synchronous communication between the
Microcontroller and peripheral,devices such as: -
Shift registers.
Liquid Crystal Display (LCD) drivers.
Analog to Digital Converters.
Other microprocessors.
Pulse Width Modulation: -The MC68HC11 Family offers a selection
of Pulse Width Modulation (PWM) options to
support a variety of applications. Up to six PWM, channels can
be selected to create continuouswaveforms with programmable rates
and software selectable duty cycles from 0 to 100%.
Memory: -The MC68HC11 Family leads in Microcontroller memory
technology. In many
applications, the MC68HC11 provides a single chip solution with
mask programmed ROM or
user-programmable EPROM. The MC68HC11 Familys RAM uses a fully
static design and the
-
7/29/2019 Navbelt and guide cane
14/16
14
contents can be preserved during periods of processor
inactivity. A 4-channel Direct Memory
Access (DMA) unit on some devices permits fast data transfer
between two blocks of memory,between registers or between registers
and memory.
Timer: -
The industry standard MC68HC11 timer provides flexibility,
performance and the ease ofuse. The system is based on a
free-running 16-bit counter with a programmable prescalar,
overflow interrupt, and separate function interrupts. It
includes additional features like, Input
Captures, Output Compares, Real-Time Interrupt, Pulse
Accumulator, and Watchdog Function.
A/D Converter: -
A/D systems are available with 8 to 12 channels and 8 and 10-bit
resolution. TheA/D is software programmable to provide single or
continuous conversion modes. The
embedded PC/104 computer provides a convenient development
environment. Rechargeable
NiMH batteries power the entire system and thus Guide Cane is
fully autonomous in terms of
power and computational resources. The VGA module is very useful
for visual verification and
debugging, it is no longer needed after development. In
addition, the hard-disk module canbe eliminated in the final
product because the final software can be stored in an EPROM on
the
motherboard. For module tests, the PC is connected to a smaller
keyboard and a colour LCDscreen that is attached to the handle
below the developers hand.
ADVANTAGES1. It allows fast walking, up to 1m/s while completing
complex maneuvers through
cluttered environments.
2. It can be used to travel or detect staircases.3. Easy to
handle, and no extensive training needed.4. It rolls on wheels that
are in contact with the ground, thus allowing position
estimation
by odometry.
DISADVANTAGES
1. It uses ultrasonic sensor-based obstacle avoidance system,
which is not sufficientlyreliable at detecting all obstacles under
all conditions.
2. It cannot detect overhanging objects like tabletops.
IMPROVEMENTSThe Guide Cane is currently not able to detect
tabletops but it can detect these objects
with additional upward-looking sonars. The addition of these
sonars is expected to improve the
Guide Canes performance to a level where a visually impaired
person could effectively use thedevice indoors. Outdoors, however,
the implementation of an additional type of sensor will be
required to allow the Guide Cane to detect important features,
such as sidewalk borders.
CONCLUSION
-
7/29/2019 Navbelt and guide cane
15/16
15
Both the Nav Belt and the Guide Cane are novel navigation aids
designed to help visually
impaired users navigate quickly and safely through densely
cluttered environments. Bothdevices use mobile-robotics based
obstacle avoidance technologies to determine in real-time, a
safe path for travel and to guide the user along that path.
Theoretically, conveying to the user just
a single piece of information (i.e. a safe direction to walk in)
is efficient, fast, and suitable in
practice to full walking speeds and even the image of a
particular environment could also betransmitted to the visually
impaired person (image mode of Nav Belt). It is fundamentally
different from the existing ETAs (Electronic Travel Aids) that,
at best, only inform the user
about the existence and location of obstacles but do not guide
the user around them.
-
7/29/2019 Navbelt and guide cane
16/16
16
REFERENCES
1. GOOGLE IMAGES2. BIO-ENGINEERING FOR PEOPLE WITH DISABILITIES,
IEEE JOURNAL,3.
http://www.123helpme.com/sound-navigation-and-ranging-sonar4. VFH:
LOCAL OBSTACLEAVOIDANCE WITH LOOK AHEAD VERIFICATION,
IEEE JOURNAL
5. www.advancedmsinc.com/
http://www.123helpme.com/sound-navigation-and-ranging-sonarhttp://www.123helpme.com/sound-navigation-and-ranging-sonarhttp://www.123helpme.com/sound-navigation-and-ranging-sonar