Embed Size (px)
Citation preview

AN INTELLIGENT DESIGN OF DAMPING CONTROLLERS
FOR DYNAMIC STABILITY ENHANCEMENT OF SINGLE
MACHINE INFINITE BUS SYSTEM WITH TCSC AND UPFC
CONTROLLERS: ARTIFICIAL BEE COLONY APPROACH
SUBMITTED TO THE FACULTY OF ENGINEERING
A DISSERTATION
NATIONAL INSTITUTE OF TECHNOLOGY, WARANGAL, A.P.
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
FOR THE AWARD OF THE DEGREE OF
BACHELOR OF TECHNOLOGY
IN
ELECTRICAL AND ELECTRONICS ENGINEERING
By
Under the esteemed guidance of Asst. Prof. Y. Chandrasekhar
DEPARTMENT OF ELECTRICAL ENGINEERING
NATIONAL INSTITUTE OF TECHNOLOGY
(An Institution of National Importance)
WARANGAL (A. P.)-506004
2009-2013
Mr. Bagepalli Sreenivas Teja (EE09283)
Mr. Anguluri Rajasekhar (EE08210)
Mr. K Vamsi Krishna (EE08242)
CERTIFICATE
This is to certify that the dissertation work entitled “AN INTELLIGENT DESIGN OF
DAMPING CONTROLLERS FOR DYNAMIC STABILITY ENHANCEMENT OF
SINGLE MACHINE INFINITE BUS SYSTEM WITH TCSC AND UPFC
CONTROLLERS: ARTIFICIAL BEE COLONY APPROACH” is a bonafide work
carried out by Mr. B. Sreenivas Teja (Roll No. EE09283), Mr. A. Rajasekhar (Roll No.
EE08210) & Mr. K Vamsi Krishna (Roll No. EE08242) towards the partial fulfillment of the
requirements for the award of the degree of Bachelor of Technology in Electrical and
Electronics Engineering from National Institute of Technology, Warangal during the year
2012-2013.
DEPARTMENT OF ELECTRICAL ENGINEERING
NATIONAL INSTITUTE OF TECHNOLOGY
WARANGAL (A.P)-506004
Deemed University
2012-2013
Project Guide
Mr. Y. Chandrasekhar,
Assistant Professor,
Dept. of Electrical Engineering,
National Institute of Technology,
Warangal-506004.
Head of the Department
Dr. N. Subrahmanyam,
Professor and Head,
Dept. of Electrical Engineering,
National Institute of Technology,
Warangal-506004.

ACKNOWLEDGEMENTS
We would like to express our deepest gratitude to our thesis supervisor Shri.
Y. Chandrasekhar, Assistant Professor, Electrical Engineering Department,
National Institute of technology, Warangal, for his valuable guidance and
advices in the successful completion of this dissertation work. We are very
much indebted to him for suggesting this topic and his encouragement without
which it would not have been possible to complete our work successfully.
We would also like to take this opportunity to express our profound thanks to
Dr. N. SUBRAMANYAM, Professor and Head of Electrical Engineering
Department for his cooperation throughout this work and efforts for arranging
this dissertation work.
We are thankful to the faculty of Electrical Engineering Department for their
active support and also their cooperation in collection of relevant data regarding
this topic. Also, we wish to thank all those pioneering researchers and their
outstanding contributions towards this topic. It couldn’t have been possible
without their ground work.
Finally, we wish to express our profound gratitude to our beloved parents,
other family members and all of our friends for providing constant
encouragement throughout this dissertation work.
B. Sreenivas Teja (Roll No. EE09283)
A. Rajasekhar (Roll No. EE08210)
K Vamsi Krishna (Roll No. EE08242)

ABSTRACT
In this dissertation an attempt has been made in designing novel and intelligent
flexible AC transmission system (FACTS) devices such as Thyristor Controlled Series
Compensator (TCSC), unified power flow controller (UPFC) and their coordinated
design based on PID controller for a Single Machine Infinite Bus (SMIB). To carry
out small signal stability studies with the proposed method, a SMIB linear model of
Philip-Heffron model, a well-known model for synchronous generator has been
considered. Recent past has witnessed the advancements of Power System Stabilizers
(PSS) and their variants for enhancing the stability of power system. But the added
advantages of FACTS based design outperformed PSS in terms of performance and
implementation perspective. Though FACTS based controllers are proved to be well
suited for modern day power systems, to get better performances the unknown
parameters of these devices has to be tuned optimally. To handle this problem this
dissertation puts forward an approach as an alternative for present day’s practice of
designing controllers, where traditional methods like classical optimization, manual
tuning methods are preferred. A single objective optimization frame work based on
time integral indices has been developed for obtaining optimum parametric gains of
the controllers. Further a swarm intelligent based Artificial Bee Colony (ABC)
algorithm is considered to carry out this optimization task. Various loading conditions
are considered for different combinations of TCSC, UPFC, PID, PSS and a detailed
analysis is carried out. Computer simulations and extensive analysis followed by
several comparisons with reported results (in literature) revealed the superiority of
proposed intelligent method in designing state-of-art FACTS controllers for a SMIB
system. An Industrial Standard MATLAB/SIMULINK simulation package is used to
simulate the system considered.
Keywords: AVR; PSS; UPFC; TCSC; Modified Philip-Heffron’s Model; SMIB;
Artificial Bee Colony Algorithm; Global Optimization.

INDEX
Chapter.
No CONTENTS
Page
No.
List of Figures
List of Tables
i
iii
1 INTRODUCTION
1.1. Automatic Voltage Regular (AVR) & Power System Stabilizer
(PSS)
1.2. Modified Philip-Heffron’s Model
1.3. Flexible AC Transmission Systems (FACTS devices)
1.3.1. Thyristor Controlled Series Compensator (TCSC)
1.3.2. Unified Power Flow Controller (UPFC)
1.3.3. Coordinated Design of PID, PSS & FACTS Controllers
1.4. Literature Survey
1.5. Artificial Bee Colony methods for Engineering Applications
1.6. Organization of Report
1
3
3
4
5
5
6
7
7
2 Power System Modeling
2.1. Modified Philip-Heffron’s Model for SMIB system
2.1.1. Generator Modeling
2.1.2. Linearized Model of Philip-Heffron’s Model
2.1.3. PSS & Excitation System
2.2. Modeling of SMIB power system with TCSC Controller
2.2.1. Generator Modeling
2.2.2. Thyristor Controlled Series Compensator Modeling
2.2.3. TCSC Controllers
2.2.4. PSS & Excitation System
2.3.Modeling of SMIB power system with UPFC Controller
2.3.1. Unified Power Flow Controller (UPFC)
2.3.2. Non-linear Dynamic Model
2.3.3. Linear Dynamic Model
2.3.4. PSS & Excitation System
2.3.5. UPFC Damping Controllers
8
8
9
12
13
13
16
16
17
18
18
19
21
23
24

3 Problem Formulation
3.1. Modified Philip-Heffron’s Model
3.1.1. Structure of PSS
3.1.2. PID-PSS based Controllers
3.1.3. Time domain based Objective Function
3.2. Single Machine Infinite Bus System with TCSC Controller
3.2.1. TCSC Controller
3.2.2. PI based PSS & TCSC Controller
3.2.3. Time domain based Objective Function
3.3. Single Machine Infinite Bus System with UPFC Controller
3.3.1. Structure of UPFC damping controller
3.3.2. PI based UPFC damping Controllers
3.3.3. Time domain based Objective Function
25
25
25
26
27
27
27
28
29
29
29
30
4 Artificial Bee Colony Algorithm
4.1. Biological Motivation
4.2. The Algorithm
32
33
5 Experimental Section
5.1. System parameters of SMIB System considered for M P-H Model
5.2. System parameters of SMIB System with TCSC Controller
5.3. System parameters of SMIB System with UPFC Controller
5.4. Parameters of ABC Algorithm
39
39
40
40
6 Simulations & Results
6.1. PID-PSS Controller using Modified Philip-Heffron’s Model for
SMIB System
6.2. Coordinated tuned PI Controller and TCSC-PSS for SMIB
System using ABC algorithm
6.3. Coordinated tuned PI Controller and UPFC damping controllers
for SMIB System using ABC algorithm
42
50
57
Conclusions & Scope of Future Research 68
List of Publications From this Dissertation 69
Appendix 70
REFERENCES 74

List of figures
Figure
No.
Figure about
Chapter
No.
Page
No.
1.1
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
2.10
2.11
2.12
2.13
3.1
3.2
3.3
3.4
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
6.9
6.10
6.11
6.12
6.13
6.14
6.15
6.16
6.17
6.18
6.19
6.20
Graphical representation of AVR and PSS damping phenomenon
Single machine power system model
Modified Philip-Heffron’s model
Structure of PSS and IEEE- ST1A
Single machine infinite bus power system with TCSC
Phillips-Heffron model of SMIB with TCSC and PSS
Structure of TCSC controller
Structure of PSS and IEEE Type-ST1A Excitation system
Single machine infinite bus power system with UPFC
Phasor diagram showing the modulation of real power flow
through bus voltage magnitude and phase regulation.
Linear Philip-Heffron model of SMIB power system with UPFC
IEEE type - ST1 excitation system with PSS
Structure of Lead-lag UPFC controller (mB, mE, δB)
Structure of δE Lead-lag controller with DC voltage regulator
Structure of Lead-lag PSS with PID controller
Structure of TCSC controller
Structure of TCSC controller and PSS with PI controller
Structure of PI controller based mB, δE or δB damping controllers
Speed deviation for a step change of 10% in Vref for heavy loaded
or strong system
Rotor angle deviation for a step change of 10% in Vref for strong
system
Speed dev. for a step change of 10% in Vref for weak system
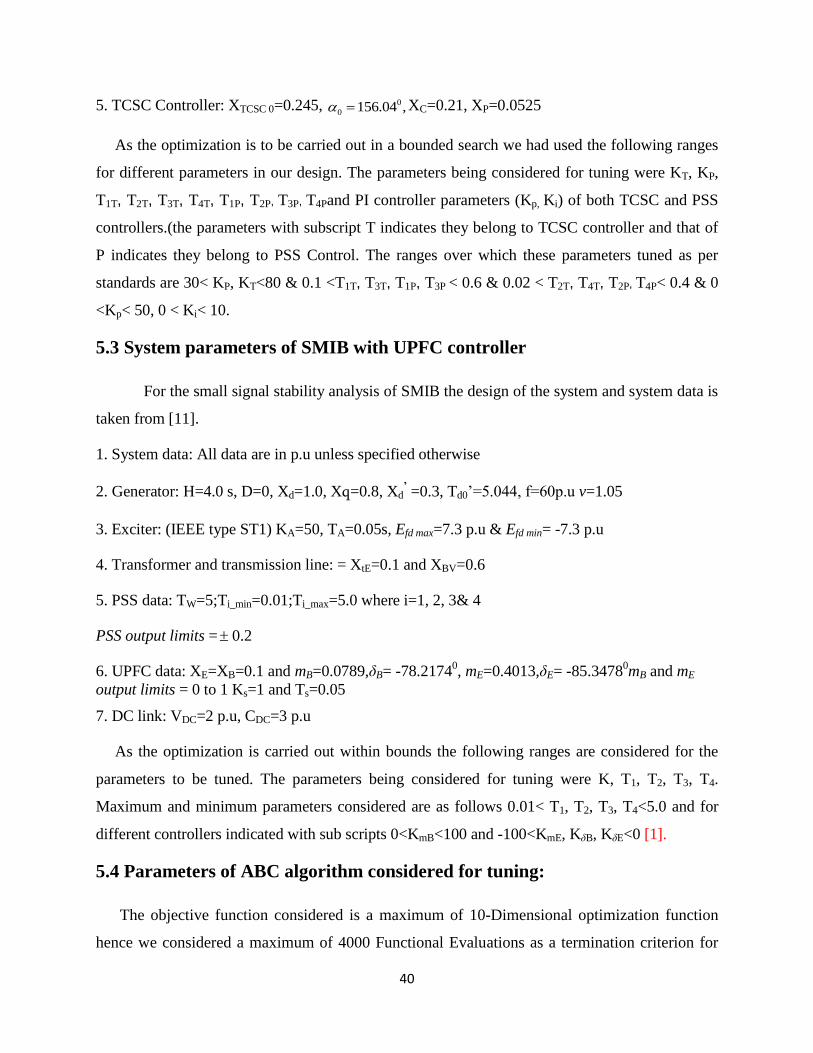
Rotor angle dev. for a step change of 10% in Vref for weak system
Speed dev. for a step change of 10% in Vref for nominal
Rotor angle dev. for a step change of 10% in Vref for nominal
system
Convergence Characteristics of ABC towards optimum for
different loading conditions without PID
Convergence Characteristics of ABC towards optimum for
different loading conditions with PID
Speed deviation response for Heavy loaded system
Rotor angle deviation response for Heavy loaded system
Speed deviation response for Light loaded system
Rotor Angle Deviation: Light loaded
Speed Deviation: Nominal loaded
Rotor Angle Deviation: Nominal loaded
Convergence of ABC towards minimum: without PI Controller
Convergence of ABC towards minimum: with PI Controller
Speed deviation response of Nominal loaded system
Rotor angle deviation response of Nominal loaded system
Speed deviation response of Light loaded system
Rotor angle deviation response of light loaded system
1
2
2
2
2
2
2
2
2
2
2
2
2
2
3
3
3
3
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
2
8
11
12
13
15
17
17
18
19
23
23
24
24
26
27
28
30
44
44
45
46
46
47
48
48
51
52
52
53
54
54
55
55
61
63
63
i

6.21
6.22
6.23
6.24
6.25
C.1
C.2
C.3
Speed deviation response of heavy loaded system
Rotor angle deviation of Heavy loaded system
Objective function minimization plot for heavy loaded system
Objective function minimization plot for nominal loaded system
Objective function minimization plot for light loaded system
Linear Philip-Heffron’s model of SMIB employing PI based
UPFC Damping Controllers
Linear Philip-Heffron’s model of SMIB employing PI Controllers
for TCSC and PSS
Modified Philip-Heffron’s Model of SMIB with PID-PSS
6
6
6
6
6
65
65
66
66
67
72
72
73
ii

List of Tables
Figure
No.
Figure about
Chapter
No.
Page
No.
5.4.1
6.1.1
6.1.2
6.1.3
6.1.4
6.1.5
6.2.1
6.2.2
6.2.3
6.2.4
6.3.1
6.3.2
6.3.3
6.3.4
6.3.5
6.3.6
6.3.7
6.3.8
6.3.9
6.3.10
Algorithmic Parameters (ABC)
Loading conditions considered (p.u)
Parametric Values Obtained for PSS Using ABC
Parametric Values Obtained for PID Using ABC
Mean and Standard Deviation (std) without and with PID
controller
Settling times and peak values for various loading conditions
Parametric Values Obtained for Coordinated TCSC-PSS Using
ABC and Obj Fun Minimization values
Parametric Values Obtained for coordinated PI controller TCSC-
PSS Using ABC and obj func. Minimization values
Peak values for various loading conditions
Settling time values for various loading conditions
Loading conditions considered (p.u)
Parametric values of damping controllers obtained for Nominal
loaded system using ABC
Parametric values of coordinated PI controllers obtained for
nominal loaded system using ABC
Parametric values of damping controllers obtained for light loaded
system using ABC
Parametric values of coordinated PI controllers obtained for light
loaded system using ABC
Parametric values of PI controllers obtained for heavy loaded
system using ABC
Parametric values of coordinated tuned PI controllers obtained for
heavy loaded system using ABC
Time domain indices for speed and rotor angle deviation responses
and objective function minimization values for nominal loaded
system
Time domain indices for speed and rotor angle deviation responses
and objective function minimization values for light loaded system
Time domain indices for speed and rotor angle deviation responses
and objective function minimization values for heavy loaded
system
5
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
41
42
42
43
43
49
50
51
56
56
57
57
58
58
58
59
59
60
62
64
iii

1
CHAPTER 1
INTRODUCTION
1.1 Automatic Voltage Regulator (AVR) & Power System Stabilizer (PSS)
In the earlier days, the power systems were simple and relatively non-remote. To supply the
load demand in earlier days, power was generated beside the load center locally. In the recent
years the complexity of power system has been drastically increased with the rapid growth of
power demand. Due to limited availability of resources and other environmental constraints
modern day power systems are getting more loaded than before causing system to operate near
their transient stability limits. Power system is dynamic and nonlinear system, often experience
changes in generation, transmission and loading conditions. For reliable power supply, the
modern day power systems require continuous balance between electrical power generation and
varying load demand.
As the distantly located interconnected power systems need to be maintained at constant
operating voltage, fast acting high gain Automatic Voltage Regulators (AVR) are being used for
synchronous generators. A high response exciter is beneficial in increasing the synchronizing
torque, thus enhancing the transient stability i.e. to hold the generator in synchronism with power
system during large transient fault condition. Though AVRs are used to maintain constant
voltage, they are responsible for low frequency oscillations (0.1-3 Hz) and causes negative
damping on the rotor by producing a component of electric torque out of phase with speed
deviation () [2].Stability of synchronous generators depends upon number of factors such as
setting of Automatic Voltage Regulators (AVR). AVR and generator field dynamics introduces a
phase lag so that resulting torque is out of phase with both rotor angle and speed deviation.
Positive synchronizing torque and negative damping torque often result, which can cancel the
small inherent positive damping torque available, leading to instability. Furthermore if not
sufficiently damped, these oscillations may keep grow in magnitude until loss of synchronism
results. This will affects the small signal stability of power system. Small signal stability refers to
the ability to maintain synchronism under small disturbances, which are generally caused by
small variations in loads and generation.

2
To compensate the unwanted effect of these voltage regulators, additional signals are
introduced in feedback loop of voltage regulators. The additional signals are mostly derived from
speed deviation, excitation deviation or accelerating power. This is achieved by injecting a
stabilizing signal into the excitation system voltage reference summing point junction. The
device setup to provide this signal is called ―power system stabilizer". The basic function of PSS
is to extend the stability limit by modulating generator excitation to provide the positive damping
torque to power swing modes. Power System Stabilizer produces a component of electrical
torque in the direction of speed deviation, which accounts for positive damping on rotor
oscillations. A typical PSS consists of phase compensation stage, a signal washout stage and gain
block [1, 2].
Fig 1.1: Graphical representation of AVR and PSS damping phenomenon

3
1.2 Modified Philip-Heffron’s Model
To carry the small signal stability studies of Single Machine Infinite Bus (SMIB) linear
model of Philip-Heffron, which is well known model for synchronous generators is considered.
It is quite accurate for the small signal stability studies of power systems [11]. It has worked
successfully for the designing and tuning of conventional power system stabilizers. Though these
stabilizers have simple robust structures, tuning them not only requires considerable expertise
but also a knowledge of system parameters external to the generating station. These parameters
may vary during normal operation. of the power system. Even in the case of single machine
infinite bus models, estimates of equivalent line impedance and the voltage of the remote bus are
required. The PSS design also requires information of the rotor angle δ measured with respect to
the remote bus. These parameters cannot be measured directly and hence they are to be estimated
based on reduced order models of the rest of the system connected to the generator. If the
available information for the rest of the system is inaccurate, the conventionally designed PSS
may result in poor system performance.
Recently Gurrala and Sen [3] proposed a modified Philip-Heffron model with PSS which
judges system disturbances like change in system configuration and load changes based on
deviation of power flow, voltage and rotor angle at secondary of step-up transformer. The main
advantage with this system is that it doesn‘t require knowledge of system parameters external to
generating station which may vary during normal operation. The PSS tries to control the rotor
angle measured with respect to the local bus rather than the angle δ measured with respect to the
remote bus to damp the oscillations. All PSS design parameters are thus calculated from local
measurements and there is no need to estimate or compute the values of equivalent external
impedances, bus voltage and rotor angles at the remote bus.
1.3 Flexible AC Transmission Systems (FACTS devices)
The most widely used conventional PSS is lead-lag PSS where the gain settings are fixed
under certain value which are determined under particular operating conditions to result in
optimal performance for a specific condition. However, they give poor performance under
different synchronous generator loading conditions. But PSS causes variations in voltage profiles

4
and its operating time is relatively high. When it is not properly tuned, PSS may lead to leading
power factor operations [8-10].
Due to advancement in Power Electronic Drive technologies, Flexible AC Transmission
Systems (FACTS) devices have been economically proved to be very useful for enhancement of
power system stability and power transfer capacity, decreasing line losses and generation costs
ameliorates security of power system. FACTS controllers are capable of controlling the network
condition in a very fast manner and this feature of FACTS can be exploited to improve the
stability of a power system. They are able to provide rapid active and reactive power
compensations to power systems, and therefore can be used to provide voltage support and
power flow control, increase transient stability and improve power oscillation damping. Suitably
located FACTS devices allow more efficient utilization of existing transmission networks.
1.3.1 Thyristor Controlled Series Compensator
Fundamental feature of Thyristor based switching controllers is that speed of response of
passive power system components (C & L) and system mechanical response will get enhanced.
Thyristor Controlled Series Compensator (TCSC) belongs to first generation series FACTS
devices. The problem with these devices is that that it can form a series resonant circuit in series
with the reactance of the transmission line, thus limiting the rating of the TCSC to a range of 20
to 70 % the line reactance. The problem with TCSC is that that it can form a series resonant
circuit in series with the reactance of the transmission line, thus limiting the rating of the TCSC
to a range of 20 to 70 % the line reactance. It is widely useful because of its effectiveness in
solving transient problems and is less expensive. Its flexibility and quickness in adjusting the
reactance of transmission line helps in achieving better utilization of transmission capability,
efficient power flow control, transient stability improvement, power oscillation damping & fault
current location [11, 14-18]. To carry the small signal stability studies of Single Machine Infinite
Bus with TCSC controller, linear model of Philip-Heffron, has been considered. It is well known
model for synchronous generators and is quite accurate for the small signal stability studies of
power systems.

5
1.3.2 Unified Power Flow Controller
Unified Power Flow Controller belongs to the family of second generation FACTS devices.
It was proposed by Gyugil. Independent control on both real and reactive power flows is possible
with UPFC controller. It has the ability to adjust the three control parameters, i.e. the bus
voltage, transmission line reactance and phase angle between two buses, either simultaneously or
independently to control power flow and improve the stability. It can also improve the small
signal stability by the damping of low frequency power system oscillations. A UPFC performs
this through the control of in-phase voltage, quadrature voltage and shunt compensation. Wang
has proposed a modified linear Philip-Heffron‘s model of a power system equipped with UPFC.
He had demonstrated the issues related to the design of damping controller and choice of
parameters of UPFC (mB,mE,δB,δE) to be modulated to achieve desired damping [7-9, 19-22].
1.3.3 Coordinated design of POD, PSS and FACTS controllers
It has been observed that utilizing a feedback supplementary control (PSS), in addition to the
FACTS-device primary control, can considerably improve system damping and can also improve
system voltage profile, which is advantageous over PSSs. However, possible interaction between
PSSs and FACTS-based stabilizers may deteriorate much of their contributions to, and may even
cause adverse effect on, damping of system oscillations. Therefore, coordinated design between
PSSs and FACTS-based stabilizers is a necessity, both to make use of the advantages of the
different stabilizers and to avoid the demerits accompanied with their operations [11].
In addition to that PID controller for Modified Philip-Heffron model based Single Machine
Infinite Bus power system and coordinated tuned PI controllers for both TCSC controller based
SMIB and UPFC based SMIB has been proposed. To obtain parametric values of various
damping controllers, trial and error methods are not suitable and also to avoid the destabilizing
interactions the tuning of parameters of different controllers should be coordinated. As the
coordinated approach is more intricate than normal controller design and efficient algorithm
should be developed to get optimal parametric values for various damping controllers for
optimum system performance [15].
For this purpose of designing coordinated damping controllers, we applied new swarm
intelligent based Artificial Bee Colony (ABC) algorithm. ABC algorithm was first proposed by

6
Karaboga and Basturk [24, 25] algorithm for numerical function optimization. Due its simplicity
in structure and also having good global and local exploration skills it had been used in designing
many real world practical problems. In this work we had used ABC in designing damping
controllers for modified Philip-Heffron modeled SMIB, coordinated PI controller based TCSC &
PSS for SMIB and also coordinated PI based UPFC damping controllers for SMIB system.
1.4 Literature Survey
Since the 1960‘s, lead-lag Power System Stabilizers have been used to add damping to
electromechanical oscillations. Larsen and Swann [2] deeply discussed, in a three-part paper, the
general concepts associated with PSSs. In Part I, the concepts of applying and tuning PSSs
utilizing speed, frequency, and power input signals have been described. Part II dealt with the
performance objectives of PSSs. Part III addressed the major practical considerations associated
with applying PSSs. Although the application of GA to synthesize the PSS parameters yielded
promising results, recent research has identified some deficiencies in GA performance. Recently
Gurrala and Sen [3] proposed a modified Philip-Heffron model with PSS which judges system
disturbances like change in system configuration and load changes based on deviation of power
flow, voltage and rotor angle at secondary of step-up transformer. The main advantage with this
system is that it doesn‘t require knowledge of system parameters external to generating station
which may vary during normal operation. As a result, different optimization algorithms, such as
simulated annealing [4], particle swarm [5], Tabu search [6, 7], and evolutionary programming
[54], have been also explored. In 1988, Hingorani [7-9] have initiated the concept of FACTS
devices and their application for the following purposes: control of power routing, loading of
transmission lines near their steady-state, short-time and dynamic limits, reducing generation
reserve margins, and finally, limiting the impact of multiple faults and, hence, containing
cascaded outages. Sidhartha Panda, and N. P. Padhya [10] has proposed an approach to tune the
parameters of a Thyristor Controlled Series Compensator (TCSC) and PSS coordinately using
PSO algorithm to avoid destabilizing interactions. AlAwami, Ali Taleb [11] has investigated the
effectiveness of the coordinated design of power system stabilizers and FACTS-based stabilizers
to improve power system transient stability.

7
1.5 Artificial Bee Colony Methods for Engineering Applications
Out of all existing swarm intelligent algorithms based on bees like BCO, BA, MBO etc.,
Artificial Bee Colony (ABC) algorithm has gained wide reputation in research community
because of its outstanding performance on various kinds of practical problems [26]. Hemamalini
and Simon [27] applied this ABC technique for solving Economic dispatch problem, which
comes under the category of non-smooth cost function; the proposed technique was compared
with GA, PSO and showed that ABC had recorded best feasible solutions. Hemalini and Simon
[28] proposed a new multi-objective artificial bee colony (MOABC) to solve economic/emission
dispatch (EED) problem and also used fuzzy decision theory to extract the best compromise
solution. Omkar et al [29] presented a generic method for multi-objective design optimization of
laminated composite components based on Vector Evaluated Artificial Bee Colony (VEABC)
algorithm which is a parallel vector evaluated type, swarm intelligence multi-objective variant of
ABC. Abu-Mouti and El-Harwary [30] presented a medication in neighboring search of ABC
and applied in determination of optimal size, location and power factor for a distributed
generation (DG) to minimize total power losses on 33-bus and 69-bus feeder systems. Akay and
Karaboga [31] applied ABC in solving Engineering design problems which are generally large
scale or nonlinear or constrained optimization problems just by simply adding a constraint
handling technique into the selection step of ABC. A comprehensive view of recent
developments and real world applications can be found in [32].
1.6 Organization of report
The rest of the report is organized as follows; Chapter 2 deals with the mathematical
modeling of power system for single machine infinite bus system with TCSC and UPFC
controller. Also the linear Modified Philip-Heffron‘s model for single machine infinite bus
system has been described. Chapter 3 describes the problem formulation for designing various
damping controllers for different systems considered followed by the objective function
considered. A chapter 4 brief about the ABC algorithm and it is followed by experimental
section in Chapter 5. The simulations and results are put forth in Section 6 and at end we provide
few conclusions.

8
CHAPTER 2
Power System Modeling
2.1 Modified Philip-Heffron’s model for SMIB system
The dynamic modeling of components in the power system like synchronous generator,
excitation system, AVR etc. is needed for small signal stability studies. A SMIB power system
model shown in Fig 2.1 is used to obtain Modified Philip-Heffron‘s model parameters.
Fig 2.1 Single machine power system model [3]
2.1.1 Generator modeling:
This is a simplified representation of a generator connected to the load through a transmission
line. IEEE Model 1.0 is used to model the synchronous generator. The dynamic equations
corresponding to this SMIB Model 1.0 are given below. The generator is represented by the 3rd
order consisting of the swing equation and the generator internal voltage equation. The
resistances of all the components of the system and transients of the transmission lines are
neglected while deriving the algebraic equations.
B
(2.1)
2
1 DTT
Helecmech
(2.2)
))((1 ''
'
'
fddddq
do
q EiXXET
E
(2.3)

9
)}({1'
tpssrefEfd
e
fd VVVKET
E
(2.4)
)( '''
qdqdqqelec iiXXiET (2.5)
The above equations are based on rotor angle δ measured with respect to the remote bus VB.
To get the dynamic equations with respect to the secondary bus voltage Vs∠θs of the step up
transformer, all the expressions involving the rotor angle δ have to be expressed in terms of δs,
where δs = δ – θs. The expressions for δs and Eq’ are as under
)(
)(2
1
sqtsas
asqts
sVXXQRP
RQXXPTan
(2.6)
cos sin)(
,0 If
'2
2'
'
ss
ss
t
dss
qt
q
t
t
dtq
s
VX
XV
XX
XV
X
XXE
then
(2.7)
2.1.2 Linearized Modified Philip-Heffron’s model
The standard Heffron-Phillips model can be obtained by linearizing the system equations
around an operating condition. Following equations can be obtained from above model.
''
qqaddq ViRiXE (2.8.1)
'
ddaqq ViRiX (2.8.2)
The q and d subscripts refers to q-axis and d-axis respectively. The machine terminal voltage
in terms of the transformer secondary is given by
cos ssdtqtq ViXiRV (2.9)
sin ssqtdtd ViXiRV
(2.10)

10
Substitution of Eqn (2.8) in Eqn (2.9) and Eqn (2.10), and there by rearranging gives the
following matrix
sin-
cos
-
- ''
ss
qss
q
d
tqt
ttd
V
EV
i
i
XXR
RXX
(2.11)
The system mechanical, electrical equations and (2.11) are linearized to obtain K constants as
follows
soso
qt
dq
qt
soqosoV
XX
XX
XX
EVK
sin
cos '
1
(2.12)
;'2 qo
td
tqi
XX
XXK
(2.13)
;'
3
td
dt
XX
XXK
(2.14)
; sin'
'
4 soso
dt
dd VXX
XXK
(2.15)
; )(
sin
)(
cos'
'
5
todt
sosoqod
totq
sosodoq
VXX
VVX
VXX
VVXK
(2.16)
; x'6
to
qo
dt
t
V
V
XX
XK
(2.17)
; cos sin
'
'
1 qoso
td
dq
qt
soqo
v iXX
XX
XX
EK
(2.18)
; cos'
'
2 so
td
dd
vXX
XXK
(2.19)

11
; )(
cos
)(
sin
'
'
3
todt
soqod
totq
sodoq
vVXX
VX
VXX
VXK
(2.20)
where
Eq0= E’q0-(Xq-X
’d)id0
Also, here the modified Heffron-Phillip‘s model comprises six constants K1 to K6 whose
definitions remain unchanged but they are not with reference to δ and EB. It can be observed that
the modified K-constants are also no longer the functions of the equivalent reactance Xe. They
are functions of Vs, δs, Vt and machine currents. Therefore the modified K constants can be now
computed based on local measurements only [3].
Fig 2.2 Modified Philip-Heffron’s model, sis rotor angle [3]
In this model, as Vs is not a constant, during linearization, three additional constants Kv1 to
Kv3are introduced at the torque, field voltage and terminal voltage junction points.
In state-space representation the SMIB power system equipped with UPFC can be modeled as
given below.
T
fdq EEX ] [ ' ; T
ss VVU ]0 0 [

12
and UBXAX
(2.21)
where as
1
0
1
0
0
0 0 0
65
''
3
'
4
21
0
AA
A
A
A
dododo
TT
KK
T
KK
TT
K
T
K
M
K
M
D
M
K
A
;
0 0
0 0 0
0 0 0
0 0 0 0
3
'
2
1
A
vA
A
A
do
v
v
T
KK
T
K
T
K
M
K
B
2.1.3 PSS and Excitation system
A conventional two stage lead-lag Power System Stabilizer along with IEEE Type-ST1A
excitation system is considered. The inputs to excitation system are terminal voltage (VT),
supplementary signal (Vs) from PSS and reference voltage (Vref). KA and TA are the gain and
time constant of excitation system respectively.
The PSS takes the speed deviation signal (Δω) as input to produce a component of electrical
torque in the direction of Δω and gives a supplementary control signal (ΔVs) to excitation system
as output. A schematic representation is presented in Fig 2.3 of PSS along with excitation.
Fig 2.3 Structure of PSS and IEEE- ST1A [3]

13
2.2 Modeling of SMIB power system with TCSC controller
The Single Machine connected to Infinite Bus through transmission line with TCSC
controller shown in Fig 2.4 is being considered for small signal stability studies.
Fig 2.4 Single machine infinite bus power system with TCSC [10]
2.2.1 Generator modeling:
The generator is represented by the 3rd order consisting of the swing equation and the
generator internal voltage equation. The resistances of all the components of the system and
transients of the transmission lines are neglected while deriving the algebraic equations. IEEE –
ST1type excitation system is considered. The nonlinear model of SMIB system with TCSC is
given as below
)1(0 ; (2.22)
; /)( MPP em (2.23)
'''' /))(( dofddddqq TEixxEE
; (2.24)
AsTRAfdfd TVVVKEE /))((
; (2.25)
2 sin 2
)(sin
11
'2
1
'
qd
dqB
d
Bq
eXX
XXV
X
VEP ; (2.26)
cos )(
1
'
1
'
d
dqB
d
dq
qX
XXV
X
XEE ; (2.27)

14
sin
1
q
Bq
TdX
VXV (2.28)
cos
1
'
1
'
d
dB
d
qEff
TdX
XV
X
EXV ; (2.29)
)(22
TqTdT VVV ; (2.30)
where
; )(TCSCCFLTEff XXXXX
; 1 Effqq XXX
; '
1 Effdd XXX
; Effdd XXX
The synchronous machine is described by 3rd
order model and the Philip-Heffron‘s model of
Single Machine Infinite Bus with TCSC controller is obtained by linearizing system equations
around an operating condition of Power system.
0 (2.31)
MDKEKK pq /]['
21
(2.32)
''
34
' /][ dofdqqq TEKEKKE
(2.33)
AfdvqAfd TEKEKKKE /])([ '
65
(2.34)
/ ,'/ ,/
/ ,/ ,/
/ ,/ ,/
65
'
34
'
21
TvqTT
qqqqq
epqee
VKEVKVK
EKEEKEK
PKEPKPK
(2.35)
15
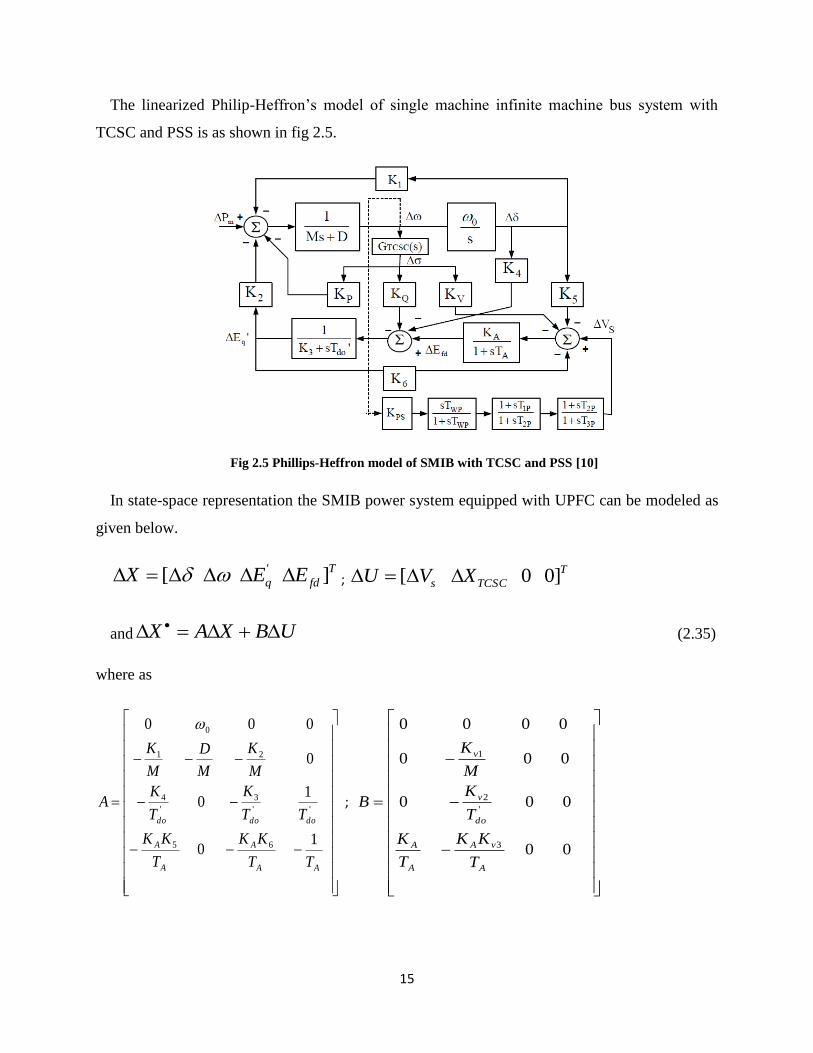
The linearized Philip-Heffron‘s model of single machine infinite machine bus system with
TCSC and PSS is as shown in fig 2.5.
Fig 2.5 Phillips-Heffron model of SMIB with TCSC and PSS [10]
In state-space representation the SMIB power system equipped with UPFC can be modeled as
given below.
T
fdq EEX ] [ ' ; T
TCSCs XVU ]0 0 [
and UBXAX
(2.35)
where as
1
0
1
0
0
0 0 0
65
''
3
'
4
21
0
AA
A
A
A
dododo
TT
KK
T
KK
TT
K
T
K
M
K
M
D
M
K
A
;
0 0
0 0 0
0 0 0
0 0 0 0
3
'
2
1
A
vA
A
A
do
v
v
T
KK
T
K
T
K
M
K
B

16
2.2.2 Thyristor Controlled Series Compensator
TCSC is one of important FACTS devices, which has been in use for many years to increase
line power transfer and its performance as well as to improve system transient stability. It
consists of three main components: capacitor bank C, bypass inductor L and bidirectional
thyristor T1 and T2. The firing angles of the thyristors are controlled to adjust the TCSC
reactance in accordance with a system control algorithm, which is coded depending on system
parameter variation. The TCSC can be controlled to work either in the capacitive or the inductive
zones avoiding steady state resonance. This mode is called venire control mode. The equivalent
capacitive reactance provided by TCSC controller as function of firing angle () is given as
))2/tan()2/tan((
)1(
)2/(cos
)(
4sin)(
2
222
kk
kXX
X
XX
XXX
PC
C
PC
C
CTCSC
(2.36)
XC = Nominal reactance of the fixed capacitor C.
XP = Inductive reactance of inductor L connected in parallel with C.
)(2 = Conduction angle of TCSC controller.
P
C
X
Xk = Compensation ratio
2.2.3 TCSC controllers
The conventional lead–lag structure is chosen in this study as a TCSC controller. The structure
of the TCSC controller model is shown in Fig 2.6. It consists of a gain block, signal wash out
block and a two stage lead-lag phase compensation blocks. These blocks serve the same purpose
as in PSS. It consists of a gain block with gain KT, a signal washout block and two-stage phase
compensation block as shown in figure. The phase compensation block provides the appropriate
phase-lead characteristics to compensate for the phase lag between input and the output signals.
The signal washout block serves as a high-pass filter, with the time constant TW (1-10sec), high
enough to allow signals associated with oscillations in input signal to pass unchanged. The
damping torque contributed by TCSC can be considered to be in two parts. The first part Kp

17
referred as direct damping torque and is directly applied to electro mechanical oscillation loop of
the generator. The second part comprises of both Kq and Kv referred as indirect damping torque,
applied through the field channel of generator. The damping torque contributed by TCSC
controller to the electromechanical oscillation loop of the generator is
DTP0DD KKKTT (2.37)
Fig 2.6 Structure of TCSC controller [10]
2.2.4 PSS and Excitation system
The conventional two-stage lead-lag Power System Stabilizer is considered in this study. IEEE
Type-ST1A Excitation system is considered. The inputs to excitation system are terminal voltage
(VT), supplementary signal (Vs) from PSS and reference voltage (Vref). KA and TA are the gain
and time constant of excitation system respectively.
Fig 2.7 Structure of PSS and IEEE Type-ST1A Excitation system [10]
The PSS takes the speed deviation signal (Δω) as input to produce a component of electrical
torque in the direction of Δω and gives a supplementary control signal (ΔVs) to excitation system
as output. It consists of a wash out block to reduce over response of damping during severe

18
events and acts as high pass filter, with time constant (Tw) high enough to allow signals
associated with oscillations in input signal to pass unchanged. The lead-lag compensation blocks
are responsible to produce a component of electrical torque in the direction of speed deviation
(Δω). The gain (Kp) determines the damping level.
2.3 Modeling of SMIB power system with UPFC controller
A SMIB power system model equipped with UPFC shown in Fig. 2.8 is used to obtain
linearized modified Philip-Heffron‘s model with UPFC.
Fig 2.8 Single machine infinite bus power system with UPFC [11]
The dynamic modeling of components in the power system like synchronous generator,
excitation system, AVR, UPFC etc. is needed for small signal stability studies.
2.3.1 Unified Power Flow Controller
The UPFC consists of a shunt connected excitation transformer (ET), series connected
boosting transformer (BT), two three-phase Gate Turn Off (GTO) based voltage source
converters (VSCs) and a common DC link capacitors. The four input control signals to the UPFC
are modulation index of shunt converter (mE), phase angle of the shunt-converter voltage (δE),
modulation index of series converter (mB) and phase angle of injected voltage (δB).
Two voltage converters VSC-E and VSC-B are operated from a common DC link provided
by a DC storage capacitor. The primary function of shunt converter is to supply the real power
demand to the series converter. It also regulates the terminal voltage of the interconnected bus by
controlling the reactive power supply to that bus. The series converter is controlled to inject a

19
voltage VBt in series with the line and its magnitude can be varied from 0 to VBt,max and its phase
angle can be varied independently from 00 to 360
0 see Fig 2.9 (a). A DC voltage regulator is
provided to maintain real power balance between two voltage converters. DC voltage is
regulated through modulating the phase angle of shunt converter voltage (δE) [11]. Equation for
real power balance between series and shunt converters is given as
Re 0 ) (
BBtEEt iViV
(2.38)
Fig 2.9 Phasor diagram showing the modulation of real power flow through bus voltage magnitude and
phase regulation [11].
A UPFC can perform voltage regulation via the addition of an in-phase voltage VBt=V0, see
Fig 2.9(b). Voltage regulation and series reactance compensation is carried out through the
addition of VBt=V0+Vp, where V0 is in phase with the bus voltage Vi and Vp is out-of phase with
the line current by 90°, see Fig 2.9 (c). Fig 2.9 (d) illustrates the process of phase-shifting. In
here, the voltage phasor to be added VBt=V0+Vφ, where V0 is in phase with the bus voltage and Vφ
shifts the resulting voltage phasorVBt+V0 by an angle φ [11].
2.3.2 Nonlinear dynamic model
A non-linear dynamic model of the system is derived by disregarding the resistances of all
components of the system (generator, transformers, transmission lines and converters) and the

20
transients of the transmission lines and transformers of the UPFC [11, 19, 21]. The nonlinear
dynamic model of the system installed with UPFC is described by the following set of equations.
)1( o (2.39)
/))1(( MDPP em (2.40)
/))(( ''''
doqdddfdq TEixxEE
(2.41)
/))(( AfdpssrefAfd TEuvVKE
(2.42)
)sincos(4
3 )sincos(
4
3BBqBBd
dc
BEEqEEd
dc
Edc ii
C
mii
C
mv
(2.43)
)]([)(''
BdEddqBqEqqqd iixEjiixjvvv
(2.44)
qqdde ivivP
(2.45)
BdEdd iii
(2.46)
2
cos dcEEEqEEtd
vmixv
(2.47)
2
sin dcEE
EdEEtq
vmixv
(2.48)
BqEqq iii
(2.49)
2
cos dcBB
BqBBtd
vmixv
(2.50)
2
sin dcBB
BdBBtq
vmixv
(2.51)
cossin bbBqBVBdBVBtqBtdEtqEtd jvvixijxjvvjvv
(2.52)

21
)2
sin cos(
2
sin' dcBB
b
d
dE
d
BddcEE
q
d
BBEd
vmv
x
x
x
xvmE
x
xi
(2.53)
)2
sincos(
2
sin' dcBB
b
d
dt
d
dEdcEE
q
d
E
Bd
vmv
x
x
x
xvmE
x
xi
(2.54)
)2
cossin(
2
cosdcBB
b
q
qE
q
BqdcEE
Eq
vmv
x
x
x
xvmi
(2.55)
)2
cossin(
2
cosdcBB
b
q
qt
q
qEdcEE
Bq
vmv
x
x
x
xvmi
(2.56)
where
)())(( tEqEBVBEtEqq xxxxxxxxx
)())((''
tEdEBVBEtEdd xxxxxxxxx
tEqBvBBq xxxxx ; tEdBvBBd xxxxx '
;
tEEqqt xxxx ; tEEddt xxxx '; tEddE xxx '
tEdqE xxx ; BvBBB xxx
2.3.3 Linear dynamic model
The linear dynamic model is obtained by linearizing the nonlinear differential equations
around an operating condition. The linear dynamic model is given as below
'
21 BbpBpbEepEpedcpdqe KmKKmKvKEKKP
...(2.57)
)] ([1 '
34'
'
BbqBqbEeqEqedcqdqfd
do
q KmKKmKvKEKKET
E
...(2.58)

22
'
65 BbvBvbEevEvedcvdq KmKKmKvKEKKv
...(2.59)
9
'
87 BbcBcbEecEcedcqdc KmKKmKvKEKKv
...(2.60)
In state-space representation the SMIB power system equipped with UPFC can be modeled
as given below.
T
dcfdq vEEX ] [ ' ; T
bbEEpss mmuU ] [
and UBXAX
(2.61)
where as
987
55
'''
3
'
4
21
0
0 0
1
0
1
0
0
0 0 0 0
KKK
T
KK
TT
KK
T
KK
T
K
TT
K
T
K
M
K
M
K
M
D
M
K
A
A
vdA
AA
A
A
A
do
qd
dododo
pd
;
bccbecce
A
bvA
A
vbA
A
evA
A
veA
A
A
do
bq
do
qb
do
eq
do
qe
bppbeppe
KKKK
T
KK
T
KK
T
KK
T
KK
T
K
T
K
T
K
T
K
T
K
M
K
M
K
M
K
M
K
B
0
0
0
0 0 0 0 0
''''

23
Fig 2.10 Linear Philip-Heffron model of SMIB power system with UPFC [11]
2.3.4 Excitation system and PSS
The conventional two stage lead-lag power system with IEEE-ST1 type excitation system
is considered. For the excitation system inputs are terminal voltage (VT), supplementary signal
Fig 2.11 IEEE type - ST1 excitation system with PSS [11]
(Vs) from PSS and reference voltage (Vref). KA and TA are the gain and time constant of
excitation system respectively. The PSS takes the speed deviation signal (Δω) as input to
produce a component of electrical torque in the direction of Δω and gives a supplementary

24
control signal (ΔVs) to excitation system as output. A schematic representation is presented in
Fig. 2.11 of PSS along with excitation.
2.3.5 UPFC damping controllers
The lead-lag damping controllers are designed to produce a component of electrical torque in
the direction of speed deviation to produce sufficient positive damping in order to provide
damping on small frequency power system oscillations. The four control parameters (mB, mE, δB,
δE) are modulated to produce sufficient damping. The parameter mB controls the magnitude of
series voltage injected, there by controls the reactive power compensation. By varying the
parameter δB the real power flow can be controlled. The parameter mE can be modulated to
control the voltage at the bus where UPFC is installed. The damping controllers for mB, mE, δB
are as shown below, where ‗u‘ may be any of the mB, mE, δB.
Fig 2.12 Structure of Lead-lag UPFC controller (mB, mE, δB) [11]
The parameter δE can be modulated to regulate the DC voltage at DC link. So, the δE
damping controller as shown below is provided with a PI controller, which functions as DC
voltage regulator.
Fig 2.13 Structure of δELead-lag controller with DC voltage regulator [11]

25
CHAPTER 3
Problem formulation
3.1 Modified Philip-Heffron’s model
3.1.1 Structure of PSS
The conventional lead–lag structure is chosen in this study. It consists of a gain block with
gain KPSS, a signal washout block and two-stage phase compensation block as shown in Fig 2.14.
The phase compensation block provides the appropriate phase-lead characteristics to compensate
for the phase lag between input and the output signals. The signal washout block serves as a
high-pass filter, with the time constant TW (1-10 sec), high enough to allow signals associated
with oscillations in input signal to pass unchanged. Transfer function of PSS is given by
1
1
1
1
1 4
3
2
1
sT
sT
sT
sT
sT
sTKV
W
WPSSs
(3.1)
In this design TW is usually pre-specified. The gains KPSS and T1, T2, T3, T4 are to be
determined. The input signal of the proposed PSS is the speed deviation (Δω) and the output is
supplementary signal (Vs).
3.1.2) PID-PSS controller
Transfer function of PID-PSS is given by
)(1
1
1
1
1 4
3
2
1 sGsT
sT
sT
sT
sT
sTKV c
W
WPSSs
(3.2)
where
)()( sKs
KKsG d
ipc
26
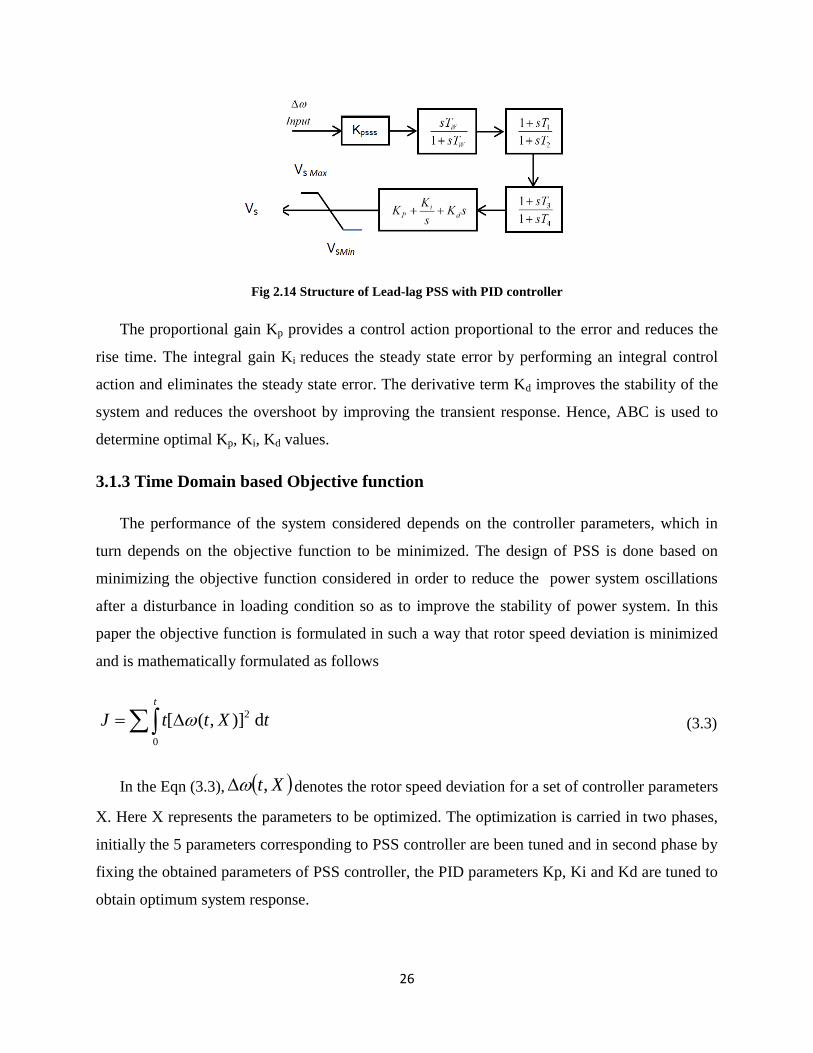
Fig 2.14 Structure of Lead-lag PSS with PID controller
The proportional gain Kp provides a control action proportional to the error and reduces the
rise time. The integral gain Ki reduces the steady state error by performing an integral control
action and eliminates the steady state error. The derivative term Kd improves the stability of the
system and reduces the overshoot by improving the transient response. Hence, ABC is used to
determine optimal Kp, Ki, Kd values.
3.1.3 Time Domain based Objective function
The performance of the system considered depends on the controller parameters, which in
turn depends on the objective function to be minimized. The design of PSS is done based on
minimizing the objective function considered in order to reduce the power system oscillations
after a disturbance in loading condition so as to improve the stability of power system. In this
paper the objective function is formulated in such a way that rotor speed deviation is minimized
and is mathematically formulated as follows
d )],([0
2
t
tXttJ
(3.3)
In the Eqn (3.3), Xt, denotes the rotor speed deviation for a set of controller parameters
X. Here X represents the parameters to be optimized. The optimization is carried in two phases,
initially the 5 parameters corresponding to PSS controller are been tuned and in second phase by
fixing the obtained parameters of PSS controller, the PID parameters Kp, Ki and Kd are tuned to
obtain optimum system response.

27
3.2 Single Machine Infinite Bus System with TCSC controller
3.2.1 TCSC controller
The conventional lead–lag structure is chosen in this study as a TCSC controller. The structure of
the TCSC controller model is shown in Fig. 3.1. It consists of a gain block, signal wash out block
and a two stage lead-lag phase compensation blocks. These blocks serve the same purpose as in
PSS.
Fig 3.1 : Structure of TCSC controller
The transfer functions of the PSS and the TCSC controller are (8) and (9) respectively:
P
P
P
P
WP
WPPPSS
sT
sT
sT
sT
sT
sTKu
4
3
2
1
1
1
1
1
1 (3.4)
T
T
T
T
WT
WTTTCSC
sT
sT
sT
sT
sT
sTKu
4
3
2
1
1
1
1
1
1 (3.5)
In this structure, the washout time constants TWT and TWP are usually pre-specified, TWT=
TWP=5s. The controller gains KT& KP and the time constants T1T ,T2T, T3T, T4T, T1P , T2P, T3P, T4P
are to be determined.
3.2.2 PI controller based TCSC controller and PSS
The PI controller based TCSC controller and lead lag PSS is as shown in Fig 3.2
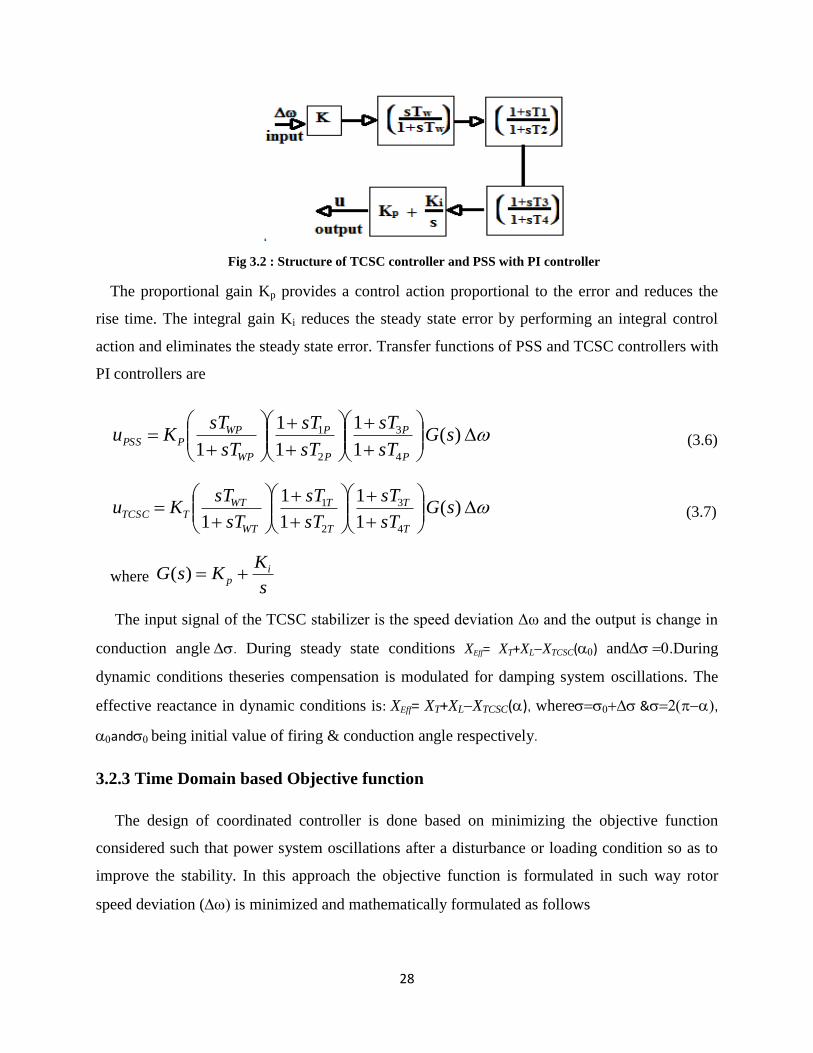
28
Fig 3.2 : Structure of TCSC controller and PSS with PI controller
The proportional gain Kp provides a control action proportional to the error and reduces the
rise time. The integral gain Ki reduces the steady state error by performing an integral control
action and eliminates the steady state error. Transfer functions of PSS and TCSC controllers with
PI controllers are
)(
1
1
1
1
1 4
3
2
1 sGsT
sT
sT
sT
sT
sTKu
P
P
P
P
WP
WPPPSS (3.6)
)(
1
1
1
1
1 4
3
2
1 sGsT
sT
sT
sT
sT
sTKu
T
T
T
T
WT
WTTTCSC (3.7)
wheres
KKsG i
p )(
The input signal of the TCSC stabilizer is the speed deviation Δω and the output is change in
conduction angle. During steady state conditions XEff= XT+XLXTCSC() and.During
dynamic conditions theseries compensation is modulated for damping system oscillations. The
effective reactance in dynamic conditions is: XEff= XT+XLXTCSC(), where&,
andbeing initial value of firing & conduction angle respectively.
3.2.3 Time Domain based Objective function
The design of coordinated controller is done based on minimizing the objective function
considered such that power system oscillations after a disturbance or loading condition so as to
improve the stability. In this approach the objective function is formulated in such way rotor
speed deviation (is minimized and mathematically formulated as follows

29
1
0
2),(
t
dtXttJ
(3.8)
In the above equations, t, X) denotes the rotor speed deviation for a set of controller
parameters X. Here X represents the parameters to be optimized. The optimization is carried in
two phases, initially the 10 parameters corresponding to both TCSC and PSS controller are been
tuned coordinately and in second phase by fixing the obtained parameters of TCSC and PSS
controllers, the PI parameters Kp and Ki of both TCSC and PSS are tuned coordinately to obtain
optimum system response.
3.2 Single Machine Infinite Bus System with UPFC controller
3.3.1 Structure of UPFC damping controller
The conventional lead–lag structure is chosen for UPFC damping controllers in this study. It
consists of a gain block with gain K, a signal washout block and two-stage phase compensation
block as shown in Fig. 2.1.2 and 2.1.3. The phase compensation block provides the appropriate
phase-lead characteristics to compensate for the phase lag between input and the output signals.
The signal washout block serves as a high-pass filter, with the time constant TW(5 sec), high
enough to allow signals associated with oscillations in input signal to pass unchanged.
In this design TW is usually pre-specified. The gains K and T1, T2, T3, T4 are to be determined.
The input signal of the proposed damping controllers is the speed deviation (Δω) and the output
is supplementary signal is u (mB, mE, δB, δE).
3.3.2 PI controller based UPFC damping controllers:
The PI controller based lead lag damping controllers for mB, δEandδBis as shown below,
where ‗u‘ may be any of the mB, δE or δB. The proportional gain Kp provides a control action
proportional to the error and reduces the rise time. The integral gain Ki reduces the steady state
error by performing an integral control action and eliminates the steady state error.

30
Fig 3.3 Structure of PI controller based mB, δE or δBdamping controllers
3.3.3 Time Domain based Objective Function
The performance of the system considered depends on the controller parameters, which in
turn depends on the objective function to be minimized. The design of damping is done based on
minimizing the objective function considered in order to reduce the power system oscillations
after a disturbance in loading condition so as to improve the stability of power system. In this
paper the objective function is formulated in such a way that rotor speed deviation is minimized
and is mathematically formulated as follows
d )],([0
2
t
tXttJ
(3.9)
In the Eqn. (3.9), t, X) denotes the rotor speed deviation for a set of controller parameters
X. Here X represents the parameters to be optimized. The optimization is carried in three phases,
initially the 5 parameters corresponding to each of the two individual controllers considered in
each case are been tuned and in second phase coordinated tuning of total 10 parameters
corresponding to both controllers considered is carried out. In the case of nominal and heavy
loading conditions SMIB system with mE, δB controllers have shown relatively lower stability
than that of system without UPFC (only PSS). So, in the case of nominal and heavy loading
conditions only mB, δE controllers are considered for tuning. In the case of light loading condition
SMIB system with mE, δE controllers have shown relatively lesser stability than that of system
without UPFC (only PSS). So, in the case of nominal and heavy loading conditions only mB, δB
controllers are considered for tuning.

31
In third phase PI controllers of selected UPFC damping controllers for particular loading
condition are tuned to achieve optimum system performance. In this phase totally 4 parameters
(Kp and Ki of either mE and δB controllers for nominal and heavy loaded conditions or mB and δE
controllers for light loaded condition) has been tuned using ABC algorithm.

32
CHAPTER 4
Artificial Bee Colony Algorithm
4.1 Biological Motivation
Honey bees live in extremely populous colonies and maintain a unique elaborated social
organization. The exchange of information among bees leads to the formation of tuned collective
knowledge. Virtually the bee colony consists of a single ―queen bee‖, a few hundred drones
(males), and tens of thousands of workers (non-reproductive females). Female (worker) bees,
probably at their early stages of age, begin foraging for food making trip after trip.
The minimal model of forage selection that leads to the emergence of collective intelligence
in honey bee swarms consists of the following essential components:
i) Food Sources: The value of a food source depends on several factors such as its proximity to
the nest, its richness or concentration of energy and ease of extracting this energy. In other
words, the ―profitability‖ of foods source can be represented in single quantity.
ii) Employed Foragers: They are associated with a particular food source, which are being
exploited. They carry with them information about this particular source such as its distance
(and also direction) from nest and share this information with certain probability.
iii) Unemployed Foragers: They are continually looking for a food source to exploit. There are
two types of unemployed foragers: scouts searching the environment and surrounding the nest
for new food sources and onlookers waiting in the nest and searching a food source through
the information shared by employed foragers.
The exchange of information among bees plays a key role in the formation of collective
knowledge. Communication among bees related to the quality of food occurs in dancing area of
hive. This dance is called round dance or waggle dance (based on the distance of food source
from the hive. Employed foragers share their information with a probability proportional to the
food source and sharing of this information through waggle dancing is longer in duration. Hence

33
the recruitment is directly proportional to the profitability of the food source.
4.2 The Algorithm
Artificial Bee Colony (ABC) is an optimization algorithm inspired by the foraging behavior of
honey bees. It was proposed and investigated by Karaboga et al. [24, 25, 32] for derivative-free
optimization of nonlinear, non-convex and multi-modal objective functions. The ABC algorithm
classifies the foraging artificial bees into three groups namely employed bees, onlooker bees,and
scout bees. First half of the colony consists of employed bees while the second half consists of
onlooker bees. A bee that is currently searching for food or exploiting a food source is called an
employed bee and a bee waiting in the hive for making decision to choose a food source is
termed as an onlooker. For every food source, there is only one employed bee and the employed
bee of abandoned food source becomes scout. In ABC, each solution to the problem is
considered as a food source and is represented by a D-dimensional real-valued vector, whereas
the fitness of the solution corresponds to the nectar amount of the associated food resource. Like
other swarm based algorithms, ABC also progresses through iterations.
It starts with population of randomly distribute solutions or food sources. The following steps
are repeated until a termination criterion is met.
i) At the initial stages of foraging, calculate the nectar amounts by sending the employed bees
on to the food sources.
ii) After sharing the information from employed bees select the food sources by the onlookers
and determine the nectar amount of food sources.
iii) Determine the scout bees and send them randomly to find out new food sources, if the bee
source is exhausted.
The main components of ABC are briefly explained below.
i) Initialization of Parameters:
The basic parameters of ABC algorithm are number of food sources (FS) which is equal to
number of employed bees (ne) or onlooker bees (no), the numbers of trails after which food

34
sources are assumed to be abandoned (limit) is set with help of parameter limit and the last
parameter is termination criterion. In ABC algorithm the number of employed bees is set equal to
number of food sources in the population i.e., for every food source there is one employed bee.
ii) Initialization of Individuals (bees):
The algorithm starts by initializing all employed bees with randomly generated food sources.
In general the position of i-th food source that corresponds to a solution in the search space is
represented as ,1 ,2 ,[ , ,..., ]i i i i DX x x x and is initially generated by the following equation:
, , [0,1].( ),i j j i j j jx lb rand ub lb
(4.1)
where 1,2,...., ,i FS 1,2,...., ,j D and , [0,1]i jrand is a uniformly distributed random number in [0,
1] and it is instantiated anew for each j-th component of the i-th food source. ubj and lbj denote
the upper and lower bounds for j-th dimension respectively. Now food sources are assigned
randomly to bees and hereafter new food sources are exploited by employed as well as onlooker
bees and explored by scout bees in repeated cycles.
iii) Exploitation of new food sources via employed bee:
A new food source is generated by each employed bee in the neighborhood of its present
position depending on local information. The new food source is exploited by perturbing any one
randomly selected dimension of the current food source in the following way:
, , , , ,.( ),i j i j i j i j k jv x x x (4.2)
where iV is the new food source in neighborhood of ,iX FSk ,....,3,2,1 such that ik and
Dj ,...,3,2,1 are randomly chosen indices. ,i j is an uniformly distributed random number in the
range [-1,1]. ,i j controls the amplitude of the perturbation term. Nectar amount or fitness of iV
for a minimization problem is defined as:
1/ (1 ( )), if ( ) 0,
1 ( ( )), if ( ) 0,
i i
i
i i
f V f Vfit
abs f V f V
(4.3)

35
where f is the function to be minimized. Once the new solution is obtained, a greedy selection
mechanism is employed between the old and the new candidate solutions i.e., iX and iV . Then
the better one is selected depending on the fitness values. If the source at iV is better than that at
iX in terms of profitability, the employed bee memorizes the new position and discards the old
one. If iX cannot be improved, its counter holding the number of trails is incremented by 1,
otherwise, the counter is reset to 0.
iv) Determining probability values for selection:
When all employed bees complete their foraging, they get ready to perform different dances
to share the information about nectar amounts and the position of their sources with the onlooker
bees in the dance area. An onlooker bee carefully observes the nectar information from all
employed bees and selects a food source site with a probability related to its nectar amount and
this probabilistic selection is dependent on fitness values of the solutions in population. In ABC,
roulette wheel fitness-based selection scheme is incorporated. Selection probability of the i-th
food source is given by:
1
,ii FS
k
k
fitp
fit
(4.4)
where ifit is the fitness value of the i-th food source iX .
(v)Exploitation of food sources by Onlooker bees based on information shared by employed
bees:
In ABC algorithm, for each food source a random real number in range [0, 1] is generated. If
the probability value in Eqn. (4) associated with that source is greater than the produced random
number then the onlooker bee produces modification on its food source position by making use
of Eqn. (2). After the source is evaluated, greedy mechanism is applied and counters are either
incremented by 1 or reset to 0 based on the counters holding trails (a similar mechanism as that
of the employed bees).

36
vi) Exploration of new food sources by Scout bees:
In a cycle of this cyclic process, after all employed and onlooker bees complete their
searches; the algorithm is made to check if there is any exhausted food source that needs to be
abandoned, the counters which have been updated during each search are been used. If the value
of a counter is greater than the limit then the source associated with this counter is abandoned.
Abandoned food source by a bee is replaced by a new food source discovered by the scout. This
is done by producing a site position randomly and replacing with abandoned one. This operation
is similar to that of initializing a new food sources to unemployed bee (discussed in earlier
section). Below we provide a simplified pseudo-code of the ABC algorithm.
Summary of Artificial Bee Colony Algorithm
1. Initialization
2. Move the Employed Bees onto their Food sources and evaluate their nectar amounts
3. Place the onlookers depending upon the nectar amounts obtained from employed
bees.
4. Send the scouts for exploiting new food sources
5. Memorize the best food sources obtained so far
6. If a termination criterion is not satisfied, go to step 2; otherwise stop the procedure
and display the best food source obtained so far.
Pseudo Code of ABC Algorithm
Step1. Initialize the population of solutions ,ijx FSi ,....2,1 , ,,....2,1 Dj 0itrail ; itrail is
the non-improvement number
Step2. Evaluate the population
Step3. Cycle=1
Step4. REPEAT
{------------Produce new food source population for employed bee-------------}
Step5. For i=1 to FS do

37
i. Produce a new food source iv for the employed bee of the food source ix by
using (4.3) evaluate its quality
ii. Apply a greedy selection process between iv and ix , then after select the better
one
iii. If solution ix doesn‘t improve 1 ii trailtrail , otherwise 0itrail ;
End For
Step6. Calculate the probability values iP by (1) for the solutions using fitness values.
{------------Produce new food source population for employed bee-------------}
t=0;
i=1;
Step7. REPEAT
IF iPrand then
i. Produce a new food source ijv for the employed bee of the food source ix by
using (4.3) and evaluate the quality.
ii. Apply a greedy selection process between iv and ix , then after select the better
one
iii. If solution ix doesn‘t improve 1 ii trailtrail , otherwise 0itrail ;
iv. t=t+1
End If
UNTIL (t=FS)
{---------Scout phase--------}
Step8. If max(trail) > limit then
i. Replace 1x with a new randomly produce solution by using following equation
)(*)1,0( minmaxmin
jjjij xxrandxx

38
End If
ii. Memorize the best solution achieved so far
Cycle=Cycle+1;
UNTIL (Cycle=Maximum Cycle number)

39
CHAPTER 5
EXPERIMENTAL SECTION
5.1) System parameters of SMIB system considered for Modified Philip-
Heffron model analysis
For the small signal stability analysis of SMIB the design of the system and system data is
taken from [3].
1. System data: All data are in p.u unless specified otherwise
2. Generator: H=5 s, D=0, Xd=1.6, Xq=1.55, Xd‘ =0.32, Td0=6, machine
3. Exciter: (IEEE type ST1) KA=200, TA=0.05s, Efd max=6 p.u & Efd min= -6 p.u
4. Transformer: XT=0.1
5. CPSS data: T1=T3=0.078, T2=T4=0.026, KPSS=16, TW=2, PSS output limits 0.05
6. Mod HP-CPSS: T1= T3=0.0952, T2= T4=0.0217, KPSS=13, TW=2, PSS output limits 0.05
As the optimization is carried out within bounds the following ranges are considered for the
parameters to be tuned. The parameters being considered for tuning were KPSS, T1, T2, T3, T4 and
Kp, Ki and Kd. Maximum and minimum parameters considered are as follows.10<Kpss<80;
0.05<T1,T3<0.6; 0.02<T2, T4<0.4; 0<KP,KI<50; 0<Kd<10.
5.2 System parameters of SMIB with TCSC controller
For the small signal stability analysis of single machine infinite bus the design of the system
and system data is taken from [10].
1. System data: All data are in p.u unless specified otherwise
2. Generator: H=4.0s, D=0, Xd=1.0, Xq=0.6, Xd’ =0.3, Td0
‘=5.044, f=50, Ra=0, VT=1.05.
3. Exciter: (IEEE type ST1) KA=200, TA=0.04s.
4. Transmission line and Transformer: =0.0+j0.8 (XL=j0.7, XT=0.1)
40
5. TCSC Controller: XTCSC 0=0.245, ,04.156 0
0 XC=0.21, XP=0.0525
As the optimization is to be carried out in a bounded search we had used the following ranges
for different parameters in our design. The parameters being considered for tuning were KT, KP,
T1T, T2T, T3T, T4T, T1P, T2P, T3P, T4Pand PI controller parameters (Kp, Ki) of both TCSC and PSS
controllers.(the parameters with subscript T indicates they belong to TCSC controller and that of
P indicates they belong to PSS Control. The ranges over which these parameters tuned as per
standards are 30< KP, KT<80 & 0.1 <T1T, T3T, T1P, T3P < 0.6 & 0.02 < T2T, T4T, T2P, T4P< 0.4 & 0
<Kp< 50, 0 < Ki< 10.
5.3 System parameters of SMIB with UPFC controller
For the small signal stability analysis of SMIB the design of the system and system data is
taken from [11].
1. System data: All data are in p.u unless specified otherwise
2. Generator: H=4.0 s, D=0, Xd=1.0, Xq=0.8, Xd’ =0.3, Td0‘=5.044, f=60p.u v=1.05
3. Exciter: (IEEE type ST1) KA=50, TA=0.05s, Efd max=7.3 p.u & Efd min= -7.3 p.u
4. Transformer and transmission line: = XtE=0.1 and XBV=0.6
5. PSS data: TW=5;Ti_min=0.01;Ti_max=5.0 where i=1, 2, 3& 4
PSS output limits = 0.2
6. UPFC data: XE=XB=0.1 and mB=0.0789,δB= -78.21740, mE=0.4013,δE= -85.3478
0mB and mE
output limits = 0 to 1 Ks=1 and Ts=0.05
7. DC link: VDC=2 p.u, CDC=3 p.u
As the optimization is carried out within bounds the following ranges are considered for the
parameters to be tuned. The parameters being considered for tuning were K, T1, T2, T3, T4.
Maximum and minimum parameters considered are as follows 0.01< T1, T2, T3, T4<5.0 and for
different controllers indicated with sub scripts 0<KmB<100 and -100<KmE, KδB, KδE<0 [1].
5.4 Parameters of ABC algorithm considered for tuning:
The objective function considered is a maximum of 10-Dimensional optimization function
hence we considered a maximum of 4000 Functional Evaluations as a termination criterion for

41
designing the coordinated PID-PSS for SMIB using Modified Philip-Heffron‘s model and 200
functional evaluations for coordinated PSS-TCSC controller and coordinated UPFC damping
controllers. The rest of parameters are recorded in Table 5.4.1.
Table 5.4.1 Algorithmic Parameters (ABC)
Parameter Value
No of Bees (NB) 20
Food Sources (FS) NB/2
Employed Bees 50% of bees
Onlooker Bees 50% of bees
Scout Bees 1
Limit ne*D

42
CHAPTER 6
Simulations and Results
6.1 Simulations for PID-PSS controller using Modified Philip-Heffron’s model
for SMIB system
The loading conditions considered for this study are summarized in the following table as
shown below.
Table 6.1.1: Loading conditions considered (p.u)
Nominal Loading or
Nominal system
Ps=1.0, Qs=0.2
Heavy Loading or strong
system
Ps=0.8,Qs=0.37
Light Loading or weak
system
Ps=1.0 ,Qs=0.5
The parametric values of Power system stabilizer obtained by tuning with ABC algorithm are
tabulated as follows
Table 6.1.2: Parametric Values Obtained for PSS Using ABC
Parameter Nominal
System
Strong
System
Weak
System
KPSS 40.7576 19.5975 19.8468
T1 0.1084 0.4227 0.1991
T2 0.0200 0.0200 0.0200
T3 0.6000 0.1818 0.2020
T4 0.3411 0.3792 0.4000
The parametric values of PID controller obtained by tuning with ABC algorithm are
tabulated as follows

43
Table 6.1.3: Parametric Values Obtained for PID Using ABC
Parameter Nominal
System
Strong
System
Weak
System
KP 26.0326 21.0599 9.9071
Ki 14.7003 9.5978 4.1251
Kd 0.8354 0.4256 0.3348
Table 6.1.4: Mean and Standard Deviation (std) without and with PID controller
Loading Condition
without PID controller
With PID controller
Nominal system 8.268e-04
(2.359e-06)
8.02e-04
(1.9525e-06)
Strong system 2.494e-03
(4.0518e-06)
2.3801e-03
(3.8243e-06)
Weak system 2.0196-03
(2.3082e-06)
1.9707e-03
(1.973e-06)
For a given 10% step change in input Tm, the responses obtained for nominal, strong and
weak systems are depicted in terms of speed deviation and rotor angle deviations. Fig 6.1 and 6.2
shows the rotor angle deviation and the speed deviation responses respectively for the heavy
loaded system.

44
Fig 6.1 Speed deviation for a step change of 10% in Vref for heavy loaded or strong system
Fig 6.2 Rotor angle deviation for a step change of 10% in Vref for strong system
0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2x 10
-3
time (sec)
Speed d
evia
tion (
p.u
)
Mod P-H model PSS
ABC tuned Mod P-H model PSS
ABC tuned Mod P-H model PID-PSS
0 1 2 3 4 5 6 7-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
time (sec)
roto
r angle
devia
tion
Mod P-H model PSS
ABC tuned Mod P-H model PSS
ABC tuned Mod P-H model PID-PSS

45
From Fig 6.1 and 6.2 the time domain indices recorded in Table 6.1.5 it is clear that proposed
PID controller based PSS tuned with ABC has produced less peak over shoot and low settling
time of speed deviation response.
Similarly Fig 6.3 and 6.4 show the speed deviation and rotor angle deviation responses for
lightly loaded system. The proposed PID based ABC tuned PSS controller has shown less
settling time and peak over shoot for speed deviation response. Also it has shown less settling
time for rotor angle deviation response.
Fig 6.3 Speed dev. for a step change of 10% in Vref for weak system
0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3x 10
-3
time(sec)
Speed d
evia
tion
Mod P-H model PSS
ABC tuned Mod P-H PSS
ABC tuned Mod P-H PID-PSS
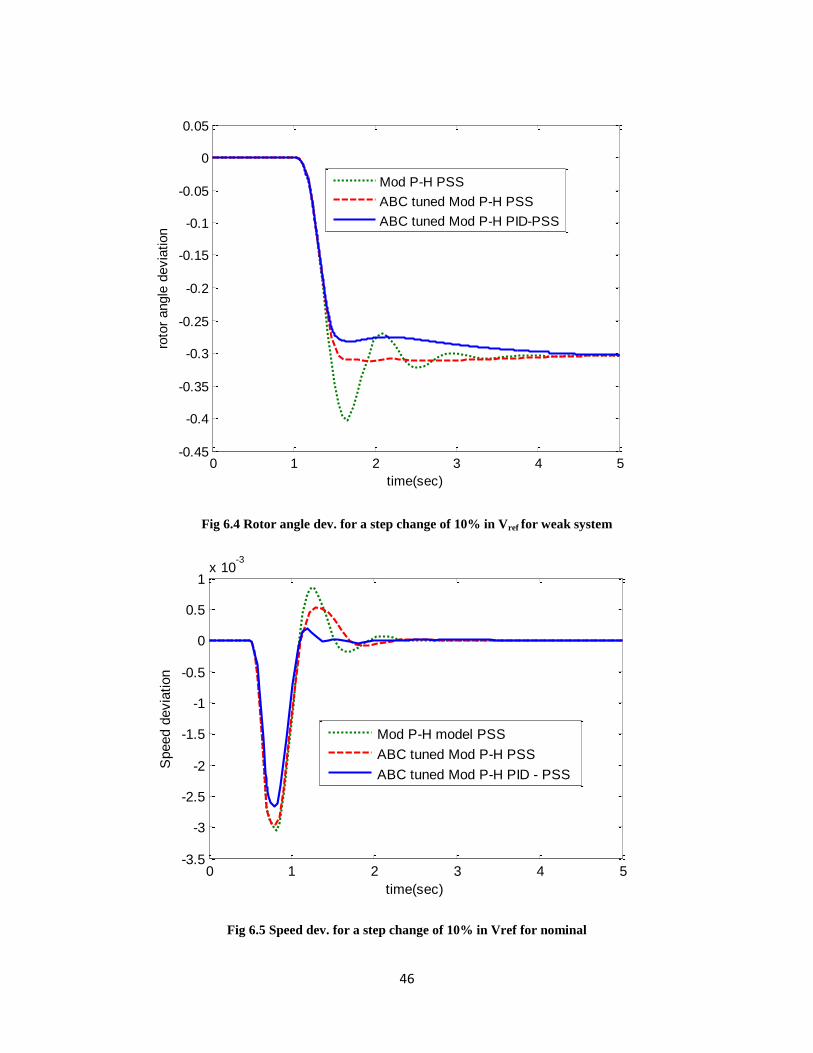
46
Fig 6.4 Rotor angle dev. for a step change of 10% in Vref for weak system
Fig 6.5 Speed dev. for a step change of 10% in Vref for nominal
0 1 2 3 4 5-0.45
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
time(sec)
roto
r angle
devia
tion
Mod P-H PSS
ABC tuned Mod P-H PSS
ABC tuned Mod P-H PID-PSS
0 1 2 3 4 5-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10
-3
time(sec)
Speed d
evia
tion
Mod P-H model PSS
ABC tuned Mod P-H PSS
ABC tuned Mod P-H PID - PSS

47
Fig 6.5 and 6.6 depict the speed deviation and rotor angle deviations for the nominal loaded
system. PID based PSS controller tuned with ABC algorithm has shown relatively less settling
time and less peak over shoot value for rotor angle deviation response. For nominal loaded
system ABC tuned PSS has produced less settling time when compared to ABC tuned PID-PSS.
Fig. 6.6 Rotor angle dev. for a step change of 10% in Vref for nominal system
Finally Fig 6.7 and 6.8 show the convergence characteristics of ABC algorithm towards
optimum values without and with PID controller respectively. The parameters obtained via
optimal tuning are recorded in Table 6.1.2 and Table 6.1.3. From both the tables it is further
evident that objective function value is less for the PI controller case.
0 1 2 3 4 5-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
time (sec)
roto
r angle
devia
tion
Mod P-H model PSS
ABC tuned Mod P-H model PSS
ABC tuned Mod P-H model PID- PSS

48
Fig 6.7 Convergence Characteristics of ABC towards optimum for different loading conditions without PID
Fig 6.8 Convergence Characteristics of ABC towards optimum for different loading conditions with PID
0 500 1000 1500 2000 2500 3000 3500 40000.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5x 10
-3 Mean of Best function values
No. of Functional evaluations
Fitness
Weak system
Nominal system
Stong system
0 500 1000 1500 2000 2500 3000 3500 40000.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5x 10
-3 Mean of Best function values
No. of functional evaluations
Fitness v
alu
e
Weak system
Nominal system
Strong system
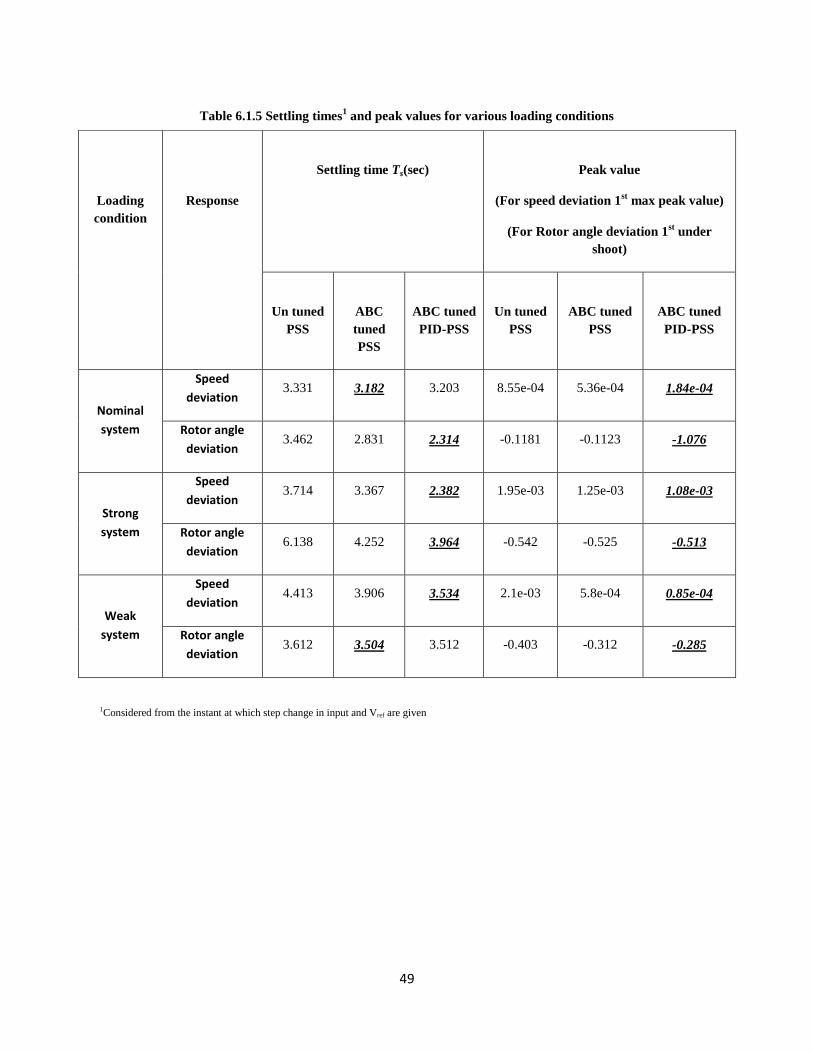
49
Table 6.1.5 Settling times1 and peak values for various loading conditions
Loading
condition
Response
Settling time Ts(sec)
Peak value
(For speed deviation 1st max peak value)
(For Rotor angle deviation 1st under
shoot)
Un tuned
PSS
ABC
tuned
PSS
ABC tuned
PID-PSS
Un tuned
PSS
ABC tuned
PSS
ABC tuned
PID-PSS
Nominal
system
Speed
deviation 3.331 3.182 3.203 8.55e-04
5.36e-04
1.84e-04
Rotor angle
deviation 3.462 2.831 2.314 -0.1181 -0.1123 -1.076
Strong
system
Speed
deviation 3.714 3.367 2.382 1.95e-03 1.25e-03 1.08e-03
Rotor angle
deviation 6.138 4.252 3.964 -0.542 -0.525 -0.513
Weak
system
Speed
deviation 4.413 3.906 3.534 2.1e-03
5.8e-04
0.85e-04
Rotor angle
deviation 3.612 3.504 3.512 -0.403 -0.312 -0.285
1Considered from the instant at which step change in input and Vref are given

50
6.2 Simulations for coordinated tuned PI controllers of TCSC-PSS for SMIB
system using ABC algorithm:
In this context we considered three different loading conditions and they are as follows:
i. Nominal Loading: Pe=1.0, Qe=0.303.
ii. Light Loading: Pe=0.3, Qe=0.015 and system inertia reduces by 25%.
iii. Heavy Loading: Pe=1.01, Qe=0.1 and total line reactance increases by 30%.
For a step change of 5% in input (Pm), in Fig 6.9-6.14 the responses obtained for nominal,
heavy and light loaded systems are depicted in terms of speed deviation and rotor angle
deviations. The optimum parametric values of coordinated tuned TCSC-PSS controllers and
coordinated PI controllers for TCSC and PSS are recorded in tables 6.2.1 and 6.2.2 respectively.
Table 6.2.1: Parametric Values Obtained for coordinated
TCSC- PSS Using ABC and Obj func. Minimization values
Parameter Nominal
Loading
Heavy
Loading
Light
Loading
KTCSC 30.0000 30.0000 30.0000
T1T 0.4226 0.4185 0.1000
T2T 0.2778 0.2394 0.1912
T3T 0.3428 0.1000 0.2532
T4T 0.3940 0.2067 0.2568
KPSS 30.0000 30.0000 30.0000
T1P 0.3076 0.2198 0.2482
T2P 0.1960 0.3138 0.2733
T3P 0.1021 0.2163 0.1811
T4P 0.3921 0.3353 0.1678
Obj Fun without
PI mean(std)
1.7684e-04
(1.300e-07)
1.9699e-04
(4.394e-07)
1.9932-03
(1.125e-08)

51
Table 6.2.2: Parametric Values Obtained for coordinated PI controller TCSC- PSS Using ABC and obj func. Minimization values
Parameter Nominal System Heavy System Light System
KP_TCSC 4.3709 5.2020 2.6232
Ki_TCSC 10.0000 10.0000 10.0000
KP_PSS 0.6785 3.6136 4.8863
Ki_PSS 10.0000 10.0000 10.0000
Obj Fun with mean(std) 4.2233e-05
(1.136e-07)
5.0702e-05
(2.4243e-07)
5.29012e-05
(9.71640e-09)
Fig 6.9 Speed deviation response for Heavy loaded system
0 1 2 3 4 5 6 7 8 9 10-6
-4
-2
0
2
4
6
8x 10
-4
time (sec)
Speed d
evia
tion
PSO-PSS
PSO tuned TCSC-PSS
ABC tuned TCSC-PSS
ABC tuned PI based TCSC-PSS

52
Fig 6.10 Rotor angle deviation response for Heavy loaded system
Fig 6.11 Speed deviation response for Light loaded system
0 1 2 3 4 5 6 70
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
time (sec)
roto
r angle
devia
tion
PSO - PSS
PSO tuned TCSC-PSS
ABC tuned TCSC-PSS
ABC tuned PI basedTCSC-PSS
0 1 2 3 4 5 6 7-5
0
5
10x 10
-4
time (sec)
speed d
evia
tion
PSO - PSS
PSO tuned TCSC-PSS
ABC tuned TCSC-PSS
ABC tuned PI based TCSC-PSS

53
Fig 6.12 Rotor Angle Deviation: Light loaded
Similarly Fig 6.11 and 6.12 show the speed deviation and rotor angle deviation responses for
lightly loaded system. As expected proposed PI based ABC tuned coordinated TCSC-PSS
controller has shown less settling times for both speed and rotor angle deviation responses.
Unlike heavy loaded system, this system enriched with coordinated controllers gave less the less
peak over shoots for both rotor angle and speed deviation responses.
Fig 6.13 and 6.14 depict the speed deviation and rotor angle deviations for the nominal
loaded system. PI based TCSC-PSS controller tuned with ABC algorithm has shown relatively
less settling times and less peak over shoot values for both speed and rotor angle deviation
responses.
0 1 2 3 4 5 6 70
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
time (sec)
roto
r angle
devia
tion
PSO-PSS
PSO tuned TCSC-PSS
TLOBA tuned TCSC-PSS
TLOBA tuned PI based TCSC-PSS

54
Fig 6.13 Speed Deviation: Nominal loaded
Fig 6.14 Rotor Angle Deviation: Nominal loaded
0 1 2 3 4 5 6 7-6
-4
-2
0
2
4
6
8
10x 10
-4
time (sec)
speed d
evia
tion
PSO-PSS
PSO tuned TCSC-PSS
TLOBA tuned TCSC-PSS
TLOBA tuned PI based TCSC-PSS
0 2 4 6 8 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
time (sec)
roto
r angle
devia
tion
PSO-PSS
PSO tuned TCSC-PSS
TLOBA tuned TCSC-PSS
TLOBA tuned PI based TCSC-PSS

55
Finally Fig 6.15 and 6.16 show the convergence characteristics of ABC algorithm towards
optimum values without and with PI controllers respectively.
Fig 6.15 Convergence of ABC towards minimum: without PI Controller
Fig 6.16 Convergence of ABC towards minimum: with PI Controller
The parameters obtained via optimal tuning are recorded in Table 6.2.1 and Table 6.2.2.
From both the tables it is further evident that objective function value is less for the PI controller
0 50 100 150 2001.6
1.8
2
2.2
2.4
2.6
2.8x 10
-4
Number of Function Evaluations
Obje
ctive F
unction (
In L
og s
cale
)
NOMINAL SYSTEM
LIGHT LOADED SYSTEM
HEAVY LOADED SYSTEM
0 50 100 150 2000.4
0.6
0.8
1
1.2
1.4
1.6x 10
-4
Number of Function Evaluations
Obje
ctive F
unction (
In L
og s
cale
)
NOMINAL SYSTEM
LIGHT LOADED SYSTEM
HEAVY LOADED SYSTEM

56
case. Tables 6.2.3 and 6.2.4 show the time domain indices values for different loading conditions
in terms of peak value and settling time.
Table 6.2.3 Peak values for various loading conditions
Table 6.2.4 Settling time values for various loading conditions
Loading
condition
Response
Peak value
PSO-PSS PSO-TCSC-PSS ABC-TCSC-
PSS
ABC-PI-TCSC-
PSS
Nominal
system
Speed deviation 9.58e-04
3.095e-04
2.725e-04
1.717e-04
Rotor angle
deviation 0.1256 0.0848 0.0767 0.0765
Heavy loaded
system
Speed deviation 7.816e-04 6.87e-04 4.09e-04
2.814e-04
Rotor angle
deviation 0.1422 0.1035 0.0909 0.0922
Light loaded
system
Speed deviation 8.07e-04
6.258e-04
4.41e-04
2.84e-04
Rotor angle
deviation 0.146 0.0975 - 0.0916
Loading
condition
Response
Settling time (sec)
PSO-PSS PSO-TCSC-PSS ABC-TCSC-
PSS
ABC-PI-TCSC-
PSS
Nominal
system
Speed deviation 8.234 5.65 3.65 2.67
Rotor angle
deviation 9.452 6.212 4.215 3.172
Heavy loaded
system
Speed deviation 8.23 6.16 3.31 2.68
Rotor angle
deviation 8.76 7.59 5.66 4.07
Light loaded
system
Speed deviation 7.76 4.56 3.92 3.16
Rotor angle
deviation 8.17 5.45 5.17 2.83

57
6.3 Simulations for coordinated tuned PI controllers of UPFC damping
controllers for SMIB system using ABC algorithm
In this context we considered three different loading conditions and they are as follows:
Table 6.3.1 Loading conditions considered (p.u)
Nominal Loading
Ps=1.0, Qs=0.015
Heavy Loading
Ps=0.3,Qs=0.015
Light Loading
Ps=1.1 ,Qs=0.4
Parametric values of damping controllers obtained for nominal loading condition using ABC
algorithm are tabulated as follows.
Table 6.3.2 Parametric values of damping controllers obtained for Nominal loaded system using ABC
Nominal Loading
Individual tuned
Controllers
Coordinated tuned
Controllers
Parameter mB E mB E
Kp 100.00 - 67.131 66.220 -30.794
T1 0.7296 4.9085 2.4397 0.1000
T2 0.1000 1.3271 4.1891 2.6803
T3 5.0000 1.9279 1.9907 0.1000
T4 3.0012 0.9410 0.1000 0.6432

58
Table 6.3.3 Parametric values of coordinated PI controllers obtained for nominal loaded system using ABC
Parametric values of damping controllers obtained for nominal loading condition using ABC
algorithm are tabulated as follows.
Table 6.3.4 Parametric values of damping controllers obtained for light loaded system using ABC
Table 6.3.5 Parametric values of coordinated PI controllers obtained for light loaded system using ABC
Coordinated tuned PI Controllers (nominal loaded system)
Parameter mB E
Kp 1.9321 2.3451
Ki 8.9751 1.6324
Light Loading
Individual tuned
Controllers
Coordinated tuned
Controllers
Parameter mB B mB B
Kp 94.665 -87.817 72.366 -100.0
T1 1.3786 3.1720 0.6982 5.0000
T2 0.1000 3.4658 0.1000 1.1660
T3 5.0000 4.9345 4.2977 5.0000
T4 2.9590 0.1000 0.9675 1.4053
Coordinated tuned PI Controllers (light loaded system)
Parameter mB E
Kp 3.2654 3.8479
Ki 7.6545 1.3487

59
Parametric values of damping controllers obtained for heavy loading condition using ABC
algorithm are tabulated as follows. In addition to that, the parametric values obtained for
coordinated tuned PI controllers for UPFC damping controllers are also tabulated in the
following table 6.3.7.
Table 6.3.6 Parametric values of PI controllers obtained for heavy loaded system using ABC
Table 6.3.7: Parametric values of coordinated tuned PI controllers obtained for heavy loaded system using
ABC
For a given 10% step change in input Pm, the responses obtained for nominal, heavy and
light load systems are depicted in terms of speed and rotor angle deviations. Table 6.3.8 shows
the time domain indices values for nominal loaded condition. Fig 6.17 and 6.18 show the speed
deviation response and rotor angle deviation response for nominal loaded system respectively.
From the Table and figures obtained it is evident that ABC tuned coordintaed PI controllers
heavy Loading
Individual tuned
Controllers
Coordinated tuned
Controllers
Parameter mB B mB B
Kp 94.665 -87.817 72.366 -100.0
T1 1.3786 3.1720 0.6982 5.0000
T2 0.1000 3.4658 0.1000 1.1660
T3 5.0000 4.9345 4.2977 5.0000
T4 2.9590 0.1000 0.9675 1.4053
Coordinated tuned PI Controllers (heavy loaded system)
Parameter mB E
Kp 0.3248 1.3657
Ki 8.4128 5.6479

60
based UPFC damping controllers have shown the optimum system performance for nominal
loaded system.
Table 6.3.8 Time domain indices for speed and rotor angle deviation responses and objective function
minimization values for nominal loaded system
Nominal System
Speed deviation Rotor angle deviation
1st Peak over
shoot
settling time
(sec)
1st Peak
over shoot
settling
time (sec)
Obj fun. Mean (std)
PSO – PSS[1] 2.07e-03 NaN 0.24 NaN -
PSO – mB[1] 1.54e-03 7.72 0.26 7.38 -
PSO - E[1] 1.726e-03 9.58 0.246 9.53 -
ABC – mB 1.219e-03 4.32 0.115 4.76 4.68e-04 (6.91e-07)
ABC - E 1.656e-03 4.45 0.278 5.88 7.97e-04(2.72e-06)
ABC CoormB -E 1.101e-03 4.26 0.106 5.23 3.79e-04(2.56e-07)
ABC CoorPImB -E 8.9e-04 3.75 0.0975 2.36 1.45e-04(3.46e-09)

61
Fig 6.17 Speed deviation response of Nominal loaded system
Fig 6.18. Rotor angle deviation response of Nominal loaded system
0 1 2 3 4 5 6 7 8 9 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5x 10
-3
time (sec)
speed d
evia
tion
PSO-PSS
PSO tuned Mb-PSS
PSO tuned deltaE-PSS
ABC tuned Mb - PSS
ABC tuned DeltaE PSS
ABC Coordinated tuned Mb - DeltaE PSS
ABC tuned coordinated PI controllers
0 1 2 3 4 5 6 7 8 9 10-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
time (sec)
roto
r angle
devia
tion
PSO-PSS
PSO tuned Mb and PSS
PSO tuned delta E and PSS
ABC tuned Mb and PSS
ABC tuned DeltaE PSS
ABC Coordinated tuned Mb-DeltaE PSS
ABC coordinated tuned PI controllers

62
Fig 6.19 and 6.20 show the speed deviation response and rotor angle deviation response
for light loaded system respectively. From the table 6.3.9 and figures it is evident that ABC
tuned coordintaed PI controllers based UPFC damping controllers have shown the optimum
system performance for light loaded system.
Table 6.3.9. Time domain indices for speed and rotor angle deviation responses and objective function
minimization values for light loaded system
Light loaded System
Speed deviation Rotor angle deviation
1st Peak over
shoot
settling time
(sec)
1st Peak
over shoot
settling
time (sec)
Obj fun. Mean (std)
PSO – PSS[1] 3.409e-03 NaN 0.362 NaN
PSO – mB[1] 2.484e-03 9.76 0.335 9.24
PSO - E[1] 2.761e-03 7.73 0.458 7.58
ABC – mB 2.094e-03 5.01 0.416 7.42 7.73e-04(2.86e-05)
ABC - E 2.681e-03 7.04 0.168 6.59 6.04e-03(3.23e-03)
ABC CoormB -E 1.657e-03 3.46 0.166 8.62 6.06e-04(2.73e-05)
ABC CoorPImB -E 12.45e-03 2.68 0.193 3.98 5.55e-04(1.423e-10)

63
Fig 6.19. Speed deviation response of Light loaded system
Fig 6.20. Rotor angle deviation response of light loaded system
0 1 2 3 4 5 6 7 8 9 10-3
-2
-1
0
1
2
3
4x 10
-3
time (sec)
speed d
evia
tion
PSO-PSS
PSO tuned Mb-PSS
PSO tuned DeltaB-PSS
ABC tuned Mb - PSS
ABC tuned Delta-B PSS
ABC coordinated tuned Mb - Delta-B PSS
ABC coordinated tuned PI controllers
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
time (sec)
err
or
PSO-PSS
PSO tuned Mb-PSS
PSO tuned DeltaB-PSS
ABC tuned Mb - PSS
ABC tuned DeltaE - PSS
ABC Coordinated tuned Mb - DeltaE PSS
ABC coordinated PI controllers

64
Fig 6.21 and 6.22 show the speed deviation response and rotor angle deviation response for
heavy loaded system respectively. From the Table 6.3.10 and Fig 6.21-6.22 it is evident that
ABC tuned coordintaed PI controllers based UPFC damping controllers have shown the
optimum system performance for heavy loaded system
Table 6.3.10.Time domain indices for speed and rotor angle deviation responses and objective function
minimization values for heavy loaded system
Heavy loaded System
Speed deviation Rotor angle deviation
1st Peak over
shoot
settling time
(sec)
1st Peak
over shoot
settling
time (sec)
Obj fun. Mean (std)
PSO – PSS[1] 3.81e-03 9.96 0.674 9.63
PSO – mB[1] 2.02e-03 6.74 0.627 8.76
PSO - E[1] 5.11e-03 9.35 1.249 9.54
ABC – mB 1.76e-03 5.29 0.462 8.38 2.691e-03(4.38e-05)
ABC - E 4.47e-03 6.58 0.89 8.24 9.471e-03(6.49e-03)
ABC CoormB -E 1.60e-03 5.25 0.367 7.82 1.111e-03(8.69e-06)
ABC CoorPImB -E 1.87e-03 3.65 0.342 3.14 3.64e-04(7.68e-08)

65
Fig 6.21 Speed deviation response of heavy loaded system
Fig 6.22 Rotor angle deviation of Heavy loaded system
0 1 2 3 4 5 6 7 8 9 10-6
-4
-2
0
2
4
6x 10
-3
time (sec)
speed d
evia
tion
PSO-PSS
PSO tuned Mb-PSS
PSO tuned DeltaE-PSS
ABC tuned Mb - PSS
ABC tuned Delta-E PSS
ABC Coorinated tuned Mb - Delta E PSS
ABC Coorinated tuned PI controllers
0 1 2 3 4 5 6 7 8 9 10-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time(sec)
roto
r angle
devia
tion
PSO-PSS
PSO tuned Mb-PSS
PSO tuned Delta-E PSS
ABC tuned Mb - PSS
ABC tuned Delta - E PSS
ABC Coordinated tuned Mb - Delta E PSS
ABC Coordinated PI controllers

66
Fig 6.23-6.25 show the object function minimization plots for heavy, nominal and light loaded
systems respectively.
Fig 6.23 Objective function minimization plot for heavy loaded system
Fig 6.24. Objective function minimization plot for nominal loaded system
0 20 40 60 80 100 120 140 160 180 2001
2
3
4
5
6
7
8
9
10
11x 10
-3
Number of Function Evaluations
Fitness V
alu
e
ABC tuned Mb
ABC tuned Delta-E
ABC tuned coordinated Mb - Delta-E
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
-3
Number of Function Evaluations
Fitness V
alu
e
ABC tuned Mb
ABC tuned Delta-E
data3ABC tuned Coordinated MB-DeltaE

67
Fig 6.25. Objective function minimization plot for light loaded system
From the Fig 6.17-6.25 and Tables 6.3.8-6.3.10 it is evident that ABC tuned coordinated PI
based UPFC damping controllers outperformed the PSO tuned and uncoordinated UPFC based
damping controllers in terms of dynamic stability.
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
5
6
7x 10
-3
Number of Function Evaluations
Fitness V
alu
e
ABC tuned Mb
ABC tuned Delta-E
ABC tuned Coordinated Mb-DeltaE

68
Conclusions
In this dissertation modeling of modified Philip-Heffron model is done for carrying out small
signal studies on a single machine infinite bus (SMIB) power system. Flexible AC transmission
systems (FACTS) based controllers i.e., Thyristor Controller Series Compensators (TCSC),
Unified Power Flow Controllers (UPFC) and their hybrid version employing PI/PID controllers
are considered for enhancing the dynamic stability of SMIB. Tuning of controllers has been done
based on time domain optimization frame work with the help of Artificial Bee Colony (ABC)
algorithm. Various loading conditions are also considered to simulate the actual real world
environment. From the above experimental section followed by results and analysis for different
loading conditions indicated the superiority of proposed method. Further this intelligent method
proved to be better than existing traditional methods such as PSS, PI-PSS.
Scope of Future Work
Future works can be directed towards design of FACTS controllers based on Multi Objective
Optimization levied with various design criteria such as avoiding large control signals from the
controllers. An online adaptive methods involving co-ordinated controllers design will be quite
challenging than offline methodology. To improve the stability further, controllers employing
fractional nature such as PID can also be implemented. The problem will be quite complex and
interesting if a 3-machine system is considered.

69
List of Publications from this Dissertation
[1] B. Sreenivas Theja, A. Rajasekhar and D.P. Kothari, ―An intelligent coordinated design of
UPFC based power system stabilizer for dynamic stability enhancement of SMIB power
system‖, 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems
(PEDES-2012), 16-19 Dec. 2012.
[2] B. Sreenivas Theja, A. Rajasekhar, D.P. Kothari and Swagatam Das, ―Design of PID
controller based Power System Stabilizer using a Modified Philip-Heffron‘s Model: An Artificial
Bee Colony Approach‖, 2013 Swarm Intelligence Symposium (SIS) under IEEE SSCI 2013,
Singapore (In Press).
[3] B. Sreenivas Theja, A. Rajasekhar and A. Abraham, ―An Optimal Design of Coordinated PI
based PSS with TCSC Controller using Modified Teaching Learning Based Optimization‖ 2013
IEEE Congress on Evolutionary Computation, CEC-2013, Mexico (Accepted).
[4] B. Sreenivas Theja, A. Raviteja, A. Rajasekhar and A. Abraham, ―Coordinated Design of
PSS with TCSC Controller: An Artificial Bee Colony Approach‖ 2012 IEEE International
Conference on Communication Systems and Network Technologies, CSNT 2012, pp. 606-611,
IEEE Press.
[5] B. Sreenivas Theja, A. Rajasekhar, K. Vamsi Krishna and Y. Chandrasekhar, ― Application
of Multi Objective GA in designing PID controller based PSS for Single Machine Infinite Bus
power system using Modified Philip-Heffron‘s model‖ 2013 IEEE INDICON (to be submitted)

70
Appendix
A. Glossary
Pm, P (Pe) Mechanical input power and electrical output power of the generator
M, H Machine inertia coefficient and inertia constant
D Machine damping coefficient
id, iq d- and q-axis armature current
vd, vq d- and q-axis terminal voltage
Tdo’ Open-circuit field time constant
xd, xd’ d-axis reactance and d-axis transient reactance‘s.
xq Generator q-axis reactance
V or v Generator terminal voltage
Eq', Efd Generator internal and field voltages
Vref Reference voltage
vb: Infinite bus voltage
KA, TA Gain and time constant of the excitation system
uPSS PSS control signal
Ks, Ts FACTS gain and time constant
mE, mB Excitation and boosting amplitude modulation ratios
vEt, iE Excitation voltage and current
vBt, iB Boosting voltage and current
Cdc, vdc DC link capacitance and voltage
xE, xB ET and BT reactance‘s
Ksyn, Kd Synchronizing and damping torques
δ Rotor angle
ω Rotor speed
ωb Synchronous speed
δE Excitation phase angle modulation
δB Boosting phase angle modulation
δS Voltage angle at secondary of Transformer bus

71
VS and S Voltage and voltage angle at secondary transformer
Firing angle of Thyristor
B. Acronyms Used in this Dissertation
SMIB: Single-machine infinite bus
PSS: Power system stabilizer
AVR: Automatic Voltage Regulator
FACTS: Flexible AC transmission systems
TCSC: Thyristor-controlled series capacitor
UPFC: Unified Power Flow Controller
POD: Power Oscillation Damping
VSC: Voltage Source Converter
p.u: Per Unit
ABC: Artificial Bee Colony
SCR: Silicon Controlled Rectifier

72
C. SIMULINK MODELS
Fig C.1 Liner Philip-Heffron’s model of SMIB employing PI based UPFC Damping Controllers
Fig C.2 Liner Philip-Heffron’s model of SMIB employing Coordinated PI Controllers for TCSC and PSS

73
Fig C.3 Modified Philip-Heffron’s Model of SMIB with PID-PSS

74
REFERENCES
[1] F. de Mello and C. Concordia, ―Concepts of synchronous machine stability as affected by
excitation control‖, IEEE Transactions on Power Apparatus and Systems, Vol. 88, pp. 316-329,
1969.
[2] E. V. Larsen and D. A. Swann; ―Applying power system stabilizers,‖ IEEE Transactions on
Power Apparatus and Systems, Vol. 100, No. 6, pp. 3017-3046, 1981.
[3] G. Gurrala and I. Sen, "A Modified Heffron-Phillip's Model for The Design of Power System
Stabilizers‖, IEEE Power India Conference and Joint International Conference on Power
System Technology, 2008. POWERCON 2008, pp.1-6, Oct. 2008.
[4] M. A. Abido, “Robust design of multi machine power system stabilizers using simulated
annealing‖, IEEE Transactions on Energy Conversion , Vol. 15 Issue. 3 , pp. 297 -304, Sept.
2000.
[5] M. A. Abido, “Particle swarm optimization for multi machine power system stabilizer
design‖, IEEE Power Engineering Society Summer Meeting, 2001. Vol. 3, pp. 1346 -1351, 15-19
July 2001.
[6] M. A. Abido and Y. L. Abdel-Magid,” Robust design of electrical power-based stabilizers
using tabu search‖, Power Engineering Society Summer Meeting. IEEE , Vol. 3 pp. 1573 -1578,
15-19 July 2001.
[7] S. Dechanupaprittha and I. Ngamroo, ―Design of robust power system stabilizers in a multi
machine power system using tabu search algorithm‖, IEEE International Conference on
Industrial Technology, ICIT 2002, Vol. 1 , pp. 291 -296, 11-14 Dec. 2002.
[8] N. G. Hingorani, “High Power Electronics and flexible AC Transmission System‖, Power
Engineering Review, IEEE, Vol. 8 Issue. 7, pp. 3-4, July 1988.
[9] N. G. Hingorani, ―FACTS technology and opportunities, Flexible AC Transmission Systems
(FACTS) - The Key to Increased Utilisation of Power Systems‖, IEE Colloquium on (Digest
No.1994/005), pp. 4/1-410, 12 Jan 1994.

75
[10] P. Sidhartha and N. P. Padhya ―Coordinated Design of TCSC Controller and PSS
Employing Particle Swarm Optimization Technique‖ International Journal of Computer and
Information Engineering, 1(5), 2007.
[11] AlAwami, Ali Taleb. ― Design of Robust PSS and facts-based controllers for stability
enhancement of power systems - .by Ali Taleb Al-Awami‖ /. 2004.
[12] I. Manuaba, M. Abdillah, Soeprijanto and M. P. Henry, "Coordination of PID based power
system stabilizer and AVR using combination of bacterial foraging technique – Particle swarm
optimization,‖ 4th International Confernce on Modeling, Simulation and Applied Optimization
(ICMSAO), pp. 1-7, April 2011.
[13] Y.L. Abdel-Magid, M. Bettayeb and M.M. Dawoud, ―Simultaneous stabilization of power
systems using genetic algorithms‖ in IEE Proceedings Generation Transmission Distribution,
vol. 144, No. 1, pp. 39-44, January 1997.
[14] B. Selvabala, D. Devaraj, ―Co-ordinated tuning of AVR-PSS using differential evolution
algorithm,‖ In Proceedings: IPEC, 2010, pp.439-444, Oct. 2010.
[15] R. Vikal and G.Goyal, "TCSC Controller Design Using Global Optimization for Stability
Analysis of Single Machine Infinite-Bus Power System," 15th
International Conference on
Intelligent System Applications to Power Systems, 2009. ISAP '09, pp.1-7.
[16] N. Magaji and M. W. Mustafa, "TCSC Damping controller design based on Self-learning
fuzzy controller Techniques," 5th
International Power Engineering and Optimization Conference
(PEOCO), 2011 pp.387-391, 6-7 June 2011.
[17] R. Narne and P. C. Panda and J. P. Therattil, "Transient stability enhancement of SMIB
system using PSS and TCSC-based controllers," IEEE Ninth International Conference on Power
Electronics and Drive Systems (PEDS), 2011, pp. 214-218.
[18] S. Panda, R. N. Patel and N. P. Padhya, ―Power System Stability Improvement by TCSC
Controller Employing a Multi- Objective Genetic Algorithm Approach‖, International Journal
of Electrical and Computer Engineering 1:8 2006.

76
[19] H F Wang. ‗A Unified Model for the Analysis of FACTS Devices in DampingPower
System Oscillations — Part III : Unified Power Flow Controller.‘ IEEE Transactions on Power
Delivery, vol 15, no 3, p. 978, July 2000.
[20] K. R. Padiyar, and A.M. Kulkarni, ―Control design and simulation of unified power flow
controller,‖ IEEE Transactions on Power Delivery , vol.13, no.4, pp.1348-1354, Oct 1998.
[21] Tambey, N.; Kothari, M.L.; , "Damping of power system oscillations with unified power
flow controller (UPFC)," IEE Proceedings Generation, Transmission and Distribution, 150(2)
pp. 129- 140, March 2003.
[22] J. Guo and ML. Crow, ―An improved UPFC control for oscillation damping,‖ IEEE Trans.
Power Syst., 25(1), pp. 288–296, 2009.
[23] C. D. Schauder, L. Gyugyi, M. R. Lund, D. M. Hamai, T. R. Rietman, D. R. Torgerson, and
A. Edris, ―Operation of the unified power flow controller (UPFC) under practical constraints,‖
IEEE Trans. Power Delivery, vol. 13, pp. 630–636, Apr. 1998.
[24] D. Karaboga and B. Basturk, ―A powerful and efficient algorithm for numerical function
optimization: artificial bee colony (abc) algorithm‖, J Glob Optim 39(3): pp. 459-471.
[25] B. Bastruk and D. Karaboga, ―An artificial bee colony (abc) algorithm for numeric function
optimization,‖ In: IEEE Swarm intelligence symposium 2006, Indianapolis, IN, USA.
[26] D. Karaboga and B. Akay, ―A survey: algorithms simulating bee swarm intelligence,‖
Artificial Intelligence Review. 31(1-4), pp. 61-85.
[27] S. Hemamalini and S. Simon, ―Economic load dispatch with value-point effect using
artificial bee colony algorithm‖ In XXXII national systems conference, India.
[28] S. Hemamalini and S. Simon, ―Economic/Emission Load Dispatch Using Artificial Bee
Colony Algorithm. In Proc: International Conference on Control Communication and Power
Engineering. ACEEE

77
[29] S.N. Omkar, J. Senthilnath, R. Khandelwal, G. Narayan Naik and S. Gopalkrishnan,
―Artificial Bee Colony (ABC) for multi-objective design optimization of composite structures.
Applied Soft Comput. 11(1), pp. 489-499.
[30] Abu-Mouti FS and E-Harway M.E, ―Modified artificial bee colony algorithm for optimal
distributed generation sizing and allocation in distribution systems‖, Electrical Power & Energy
Conference (EPEC), 2009, IEEE,pp. 1-9, 2009.
[31] B. Akay and D. Karaboga, ―Artificial Bee Colony algorithm for large-scale problems and
engineering design optimization. J of Intelligent Manufacturing. Springer. Pp. 1-14, 2010.
[32] D. Karaboga, B. Gorkemli, C. Ozturk and N. Karaboga, ―A Comprehensive survey:
artificial bee colony (ABC) algorithm and applications. Artificial Intelligence Review.
![IEEE TRANSACTIONS ON SMART GRID 1 ARMAX-Based Transfer ...417356/Smartgrid.pdf · damping controllers that are designed based on offline dynamic ... (FACTS) devices [3], and high-voltage](https://img.pdfslide.us/doc/110x75/5e857218e89ff60475663435/ieee-transactions-on-smart-grid-1-armax-based-transfer-417356smartgridpdf.jpg)




























