Embed Size (px)
Citation preview

NASA/NSTA Web Seminar:
Mapping the Moon: Simulating LOLA in the Classroom
The Search for Lunar Ice
LIVE INTERACTIVE LEARNING @ YOUR DESKTOP
Tuesday, May 13, 2008
Mapping the Moon: The Search for Lunar Ice
This is a hands-on web seminar involving a process of data gathering, interpretation, prediction, and
testing
May 13, 2008
Don HigdonDr. Susan Hoban
University of Maryland, Baltimore County
Supported through NASA Exploration Systems Mission Directorate
Review last web seminar’s objectives:
• Simulation of satellite data gathering using an ultra sound motion detector
• Acquire a topographic map of simulated lunar surface
• Select a landing site for lunar rover
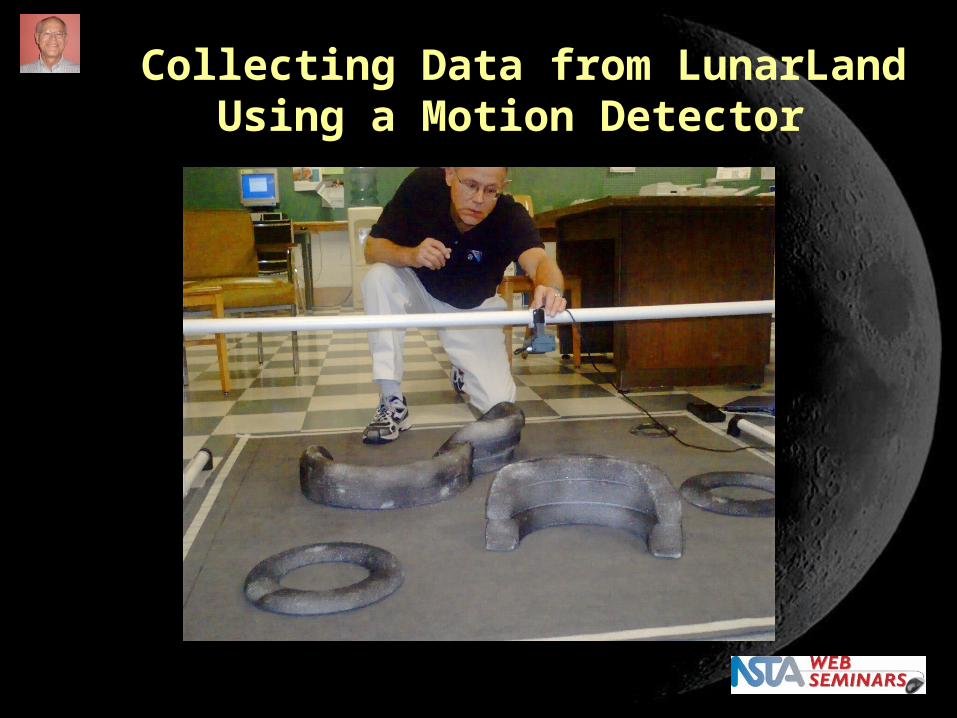
Collecting Data from LunarLand Using a Motion Detector

Review (cont)
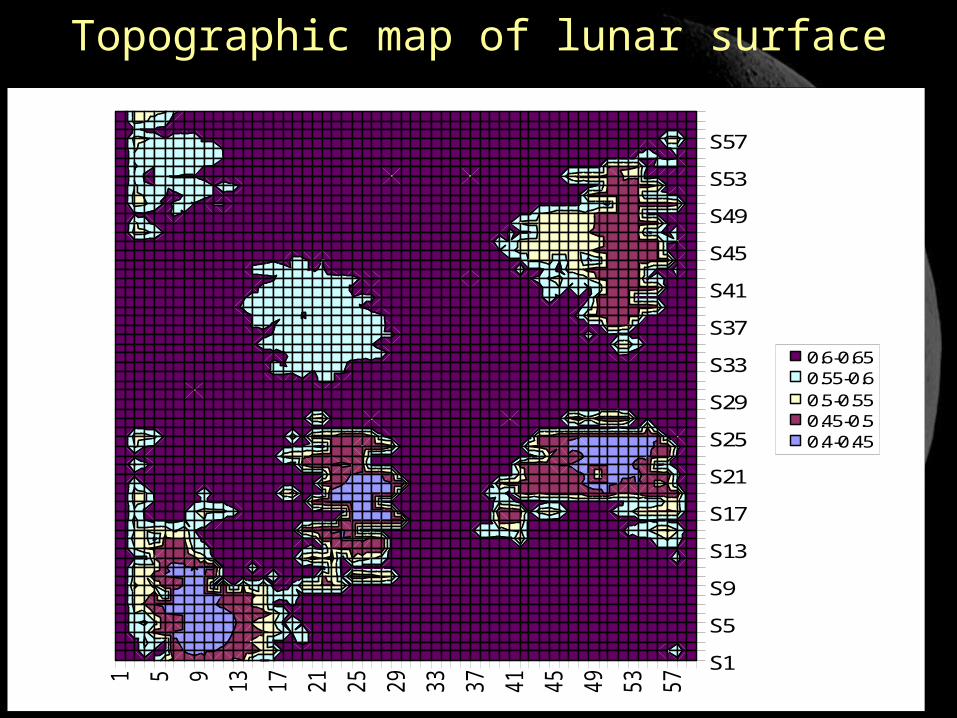
• Obtain a topographic map of the lunar surface for the purpose of selecting a landing site
1 5 9
13
17
21
25
29
33
37
41
45
49
53
57
S1
S5
S9
S13
S17
S21
S25
S29
S33
S37
S41
S45
S49
S53
S57
0.6-0.650.55-0.60.5-0.550.45-0.50.4-0.45
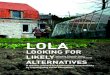
Topographic map of lunar surface

Today’s Agenda:
• Search for Lunar Ice
• Utilization of topographic map
• Robotic exploration
The BOT in today’s demo is Faraday
1 5 9
13
17
21
25
29
33
37
41
45
49
53
57
S1
S5
S9
S13
S17
S21
S25
S29
S33
S37
S41
S45
S49
S53
S57
0.6-0.650.55-0.60.5-0.550.45-0.50.4-0.45

Search for Lunar Ice: A simulated NASA mission
• Why is ice interesting? Living on the Moon requires lots of water Water is too heavy to transport in large quantity
• Why might we expect to find ice on the Moon? Clementine radio data Lunar Prospector neutron data

Robots First …
• Projected lunar exploration will be robotic
• LRO (Lunar Reconnaissance Orbiter) is scheduled to go in November 2008
• Human visitation perhaps in a decade
Have you ever programmed a robot before?
YES NO
Requirements
• Teamwork
• Interpretation of topographic map
• Some “BASIC” programming

Recall the Goal:
• Use calibration data (for BOT)
• Interpret topographic map for your section
• Calculate travel distance for the BOT
• Report code to Susan
• Observe BOT navigate to the lunar ice!

Distance Calculation for BOT
• The BOT is calibrated at 2.5 rots / cm
• “rots” is a programming variable name related to wheel rotation
• The team must decide how many “rots” will make the BOT travel the calculated distance of their section based on the BOT’s calibration
• Report this number in a table to Susan

Program the BOT
• Each team must provide two program instructions to Susan: The number of “rots” which will govern the distance
the BOT travels A turning direction (right or left, looking toward the
front of the BOT)
• Remember, Susan programs exactly what you tell her
Demonstration of the Process
• Don measures a path for the BOT (in cm)
• He then calculates the “rots” based on the calibration of the BOT (2.5 rots / cm)
• Susan programs his instructions
• Observe motion of the BOT
1 5 9
13
17
21
25
29
33
37
41
45
49
53
57
S1
S5
S9
S13
S17
S21
S25
S29
S33
S37
S41
S45
S49
S53
S57
0.6-0.650.55-0.60.5-0.550.45-0.50.4-0.45
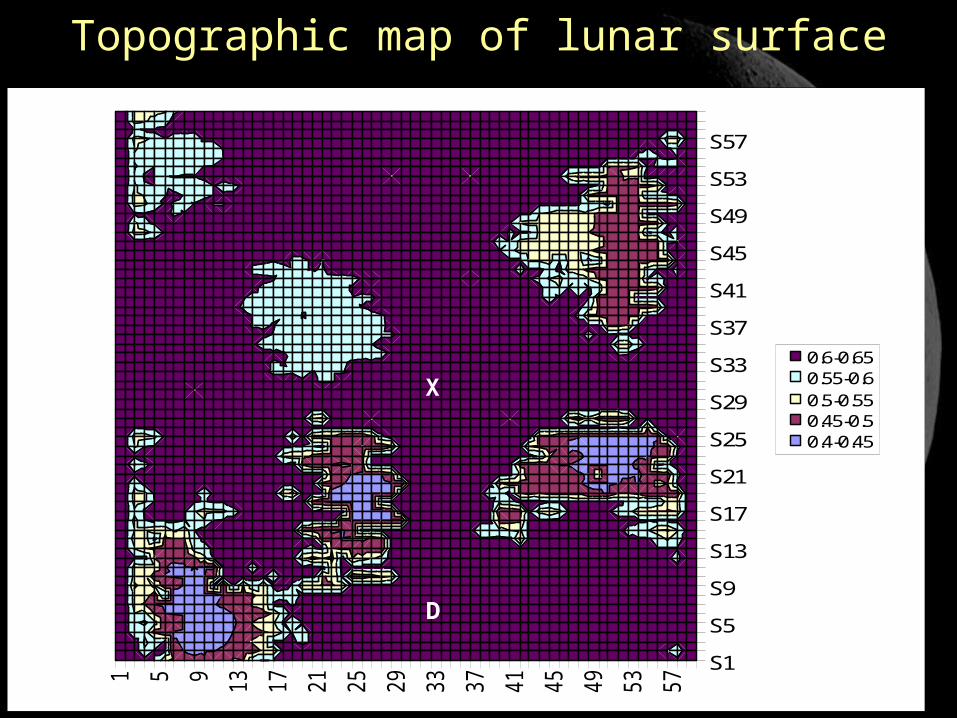
Topographic map of lunar surface
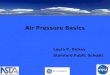
D
X
Demonstration Path
• The BOT should travel in a straight line from point-X to point-D, then turn right.
• Don measures the distance as 63 cm.
• Calculation:
63 cm x 2.5 rots /cm = 158 rots
Susan Programs …
Rots Turn Direction
158 Right
Don enters data into table
No
Now test the program . . .
Questions for Don?
Type your questions on the chat regarding
how to calculate the number of rots before
we send the teams to their rooms.
Shift Happens …
• At the last web seminar a landing site was selected by polling the participants
• Notice that the BOT did not land in that selected place
• Uncertainty prevailed, and the BOT landed only near-by, requiring 10 program instructions to get to the ice crater.
Teamwork
• Each team ( A, B, C, D, and E) will take responsibility for one part of the total path
• Team A calculates from position-A to position-B, and so on …
• We will combine each team’s work and test the BOT from the landing site at A to the lunar ice at F
Team Captain
• Flavio will assign a “Team Captain” who must report the group’s decision
• Your team only has five minutes to decide how much distance and the number of “rots” to program.
• Time permitting you will have one more chance to fix any problems
Houston, Faraday has landed…
• Teams: please report to your “rooms” and report back in 5-minutes (see the Timer!)
• One distance (in “rots”)
• One turn direction (right or left)
Data Table # 1
Team Rots Turn Direction
A
B
C
D
E
Houston, we have a problem …
• We will now observe how the BOT performs:– First, section by section – Second, as a connected set of instructions
• After observation the teams will have one more opportunity to correct the program
After Reconsidering …
• Teams return to their rooms
• Adjustments are made to the instructions
• Teams report out to Susan
• Last run of the BOT
Data Table # 2
Team Rots Turn Direction
A
B
C
D
E

Success!! Or …. Oh well, it’s only money …
• Remember, in reality, there is only so much you can do once the BOT has landed … imagine all the teamwork and all the pieces that have to fit!
• Thanks for playing!
Don and Susan

How could you do this simulation in your classroom?
Some of you may have access to this (or similar) technology…
Others may not have this technology…
Write your ideas on the chat…let’s discuss

NASA logo
Thanks to our presenters, Don Higdon and Dr.
Susan Hoban, and to NASA for sponsoring this
program
http://www.elluminate.com
Elluminate logo

http://learningcenter.nsta.org
NLC screenshot
National Science Teachers AssociationGerry Wheeler, Executive Director
Frank Owens, Associate Executive Director Conferences and Programs
Al Byers, Assistant Executive Director e-Learning
LIVE INTERACTIVE LEARNING @ YOUR DESKTOP
NSTA Web SeminarsFlavio Mendez, Director
Jeff Layman, Technical Coordinator