Embed Size (px)
Citation preview

240 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
q 2003 American Meteorological Society
Angular Distribution Models for Top-of-Atmosphere Radiative Flux Estimation fromthe Clouds and the Earth’s Radiant Energy System Instrument on the Tropical
Rainfall Measuring Mission Satellite. Part I: Methodology
NORMAN G. LOEB,* NATIVIDAD MANALO-SMITH,1 SEIJI KATO,* WALTER F. MILLER,# SHASHI K. GUPTA,1
PATRICK MINNIS,@ AND BRUCE A. WIELICKI@
*Center for Atmospheric Sciences, Hampton University, Hampton, Virginia1Analytical Services and Materials, Inc., Hampton, Virginia
#Science Applications International Corporation, Hampton, Virginia@NASA Langley Research Center, Hampton, Virginia
(Manuscript received 17 April 2002, in final form 19 September 2002)
ABSTRACT
Clouds and the Earth’s Radiant Energy System (CERES) investigates the critical role that clouds and aerosolsplay in modulating the radiative energy flow within the Earth–atmosphere system. CERES builds upon thefoundation laid by previous missions, such as the Earth Radiation Budget Experiment, to provide highly accuratetop-of-atmosphere (TOA) radiative fluxes together with coincident cloud and aerosol properties inferred fromhigh-resolution imager measurements. This paper describes the method used to construct empirical angulardistribution models (ADMs) for estimating shortwave, longwave, and window TOA radiative fluxes from CERESradiance measurements on board the Tropical Rainfall Measuring Mission satellite. To construct the ADMs,multiangle CERES measurements are combined with coincident high-resolution Visible Infrared Scanner mea-surements and meteorological parameters from the European Centre for Medium-Range Weather Forecasts dataassimilation product. The ADMs are stratified by scene types defined by parameters that have a strong influenceon the angular dependence of Earth’s radiation field at the TOA. Examples of how the new CERES ADMsdepend upon the imager-based parameters are provided together with comparisons with existing models.
1. Introduction
The need for accurate global observations of top-of-atmosphere (TOA) radiative fluxes combined with co-incident cloud and aerosol properties is critical for im-proved understanding and modeling of climate pro-cesses (Wielicki et al. 1995). Previous radiation budgetexperiments, such as the Earth Radiation Budget Ex-periment (ERBE; Barkstorm 1984) and the Scanner forRadiation Budget (ScaRaB; Kandel et al. 1998), havegenerally provided accurate broadband radiative fluxesbut no cloud or aerosol properties. Conversely, exper-iments such as the International Satellite Cloud Cli-matology Project (Rossow and Schiffer 1991) and theGlobal Aerosol Climatology Project (Geogdzhayev etal. 2002) have provided the first global satellite cloudand aerosol climatologies but no broadband TOA ra-diative fluxes. The central objective of the Clouds andthe Earth’s Radiant Energy System (CERES) mission isto provide accurate global cloud, aerosol, and radiationdata products to investigate the role that clouds and
Corresponding author address: Dr. Norman G. Loeb, Mail Stop420, NASA Langley Research Center, Hampton, VA 23681-2199.E-mail: [email protected]
aerosols play in modulating the radiative energy flowwithin the Earth–atmosphere system. CERES will alsoprovide the first global estimates of radiative fluxes atseveral atmospheric layers and the surface.
A critical component of CERES is the conversion ofmeasured radiances to TOA fluxes. Because satelliteradiometers can only instantaneously measure radiancesin a limited number of viewing directions, whereas al-bedo or flux requires radiances from all angles, modelsof the bidirectional reflection and emission propertiesof Earth at the TOA are needed. Previous investigations(e.g., ERBE) have developed empirical scene-dependentangular distribution models (ADMs) to convert eachmeasured radiance to a radiative flux estimate (Suttleset al. 1988, 1989). An alternate approach is to combinemultiangle radiance measurements from a scene and usetheoretical or empirical bidirectional reflectance modelsto infer TOA fluxes. Such a strategy is currently beingused with narrowband multiangle instruments such asPolarization and Directionality of the Earth’s Reflec-tances (POLDER; Buriez et al. 1997) and MultiangleImaging Spectroradiometer (MISR; Diner et al. 1999).This approach may provide accurate instantaneous TOAfluxes (Diner et al. 1999; Chambers et al. 2001), buterrors in regional time–space-averaged TOA fluxes tend

FEBRUARY 2003 241L O E B E T A L .
to be larger than those based on a single-view TOA-flux estimation technique applied to measurements fromcross-track scanning instruments (Stowe et al. 1994).This is because the spatial sampling of multiangle mea-surements is less uniform than that of scanning cross-track measurements, which is nearly contiguous overlarge areas.
The CERES strategy for radiance-to-flux retrievals isto use multiangle broadband CERES measurementscombined with coincident high-spatial-resolution spec-tral imager measurements to construct empirical ADMs.The ADMs are determined for scene types defined byimager-derived parameters that have a strong influenceon the anisotropy (or angular variation) of the radiancefield. An instantaneous TOA-flux estimate is determinedfor each measurement by applying the appropriate ADMcorresponding to the measurement. The approach is sim-ilar to that used by ERBE (Suttles et al. 1988, 1989)but involves a far greater number of scene types (ø200shortwave and several hundred longwave CERES ADMscene types, as compared with 12 ERBE ADM scenetypes). By improving scene identification and increasingADM model sensitivity to parameters that strongly in-fluence anisotropy, CERES will improve TOA-flux ac-curacy for individual cloud types, thereby providing amore reliable dataset for studying radiative processesand radiative forcing by cloud type.
This paper is the first in a two-part series. Here, adescription of how the CERES shortwave (SW), long-wave (LW), and window (WN) ADMs are derived forthe CERES instrument on board the Tropical RainfallMeasuring Mission (TRMM) satellite is provided. Be-cause it was not feasible to provide detailed informationon every CERES–TRMM ADM in this paper, an In-ternet site (http://asd-www.larc.nasa.gov/Inversion/)was created with figures and tabulations of the completeCERES–TRMM ADMs. Part 2 will present extensivevalidation results to assess the accuracy of SW, LW, andWN TOA fluxes derived from the CERES–TRMMADMs. Because the TRMM orbit is restricted to 388S–388N, the CERES–TRMM ADMs are applicable onlyfor tropical regions. A set of global ADMs are underdevelopment based on CERES and Moderate-Resolu-tion Imaging Spectroradiometer (MODIS) observationson Terra and, eventually, Aqua.
2. Observations
The CERES–TRMM instrument was launched on 27November 1997, along with four other instruments. TheTRMM spacecraft is in a 350-km circular, precessingorbit with a 358 inclination angle. TRMM has a 46-dayrepeat cycle, so that a full range of solar zenith anglesis acquired over a region every 46 days. The CERESinstrument is a scanning broadband radiometer that mea-sures filtered radiances in the SW (wavelengths between0.3 and 5 mm), total (TOT; wavelengths between 0.3and 200 mm), and WN (wavelengths between 8 and 12
mm) regions. On TRMM, CERES has a spatial reso-lution of approximately 10 km (equivalent diameter) andoperates in three scan modes: cross-track, along-track,and rotating azimuth plane (RAP) mode. In RAP mode,the instrument scans in elevation as it rotates in azimuth,thus acquiring radiance measurements from a widerange of viewing configurations. CERES–TRMM scansin cross-track mode for two consecutive days followedby RAP mode on the third day. Starting in mid-Aprilof 1998, along-track scanning was invoked every 15days and replaced the RAP scanning that would haveoccurred on the affected days.
Radiometric count conversion algorithms convert rawlevel-0 CERES digital counts into filtered radiances,using calibration (count conversion) coefficients that arederived from ground laboratory measurements (Priest-ley et al. 1999). The CERES instrument on TRMM wasshown to provide an unprecedented level of calibrationstability (ø0.25%) between in-orbit and ground cali-bration (Priestley et al. 1999). To remove the influenceof the instrument filter functions from the measure-ments, filtered radiances are converted to unfiltered re-flected SW, emitted LW, and emitted WN radiances us-ing the approach described in Loeb et al. (2001). Theunfiltered SW and LW radiances provide the reflectedsolar and emitted thermal radiation over the entire spec-trum, respectively, in a given viewing direction. Unfil-tered WN radiances correspond to emitted thermal ra-diation over the 8.1–11.8-mm wavelength interval only.
The CERES instrument on board the TRMM satelliteunfortunately suffered a voltage converter anomaly inAugust of 1998 and was turned off in September of1998 after 8 months of science data collection. CERES–TRMM was turned back on in March of 2000 to acquiredata that overlapped with measurements from the twoCERES instruments on board the Terra spacecraftlaunched on 18 December 1999. The CERES–TRMMinstrument acquired only one more month of sciencedata before the voltage converter anomaly caused ir-reparable damage to electronic components downstreamof the converter. As a consequence, only 9 months ofCERES–TRMM measurements are available for scienceuse. It is fortunate that improved voltage converterswere installed prior to the launch of all CERES instru-ments on Terra and Aqua.
All 9 months of the CERES–TRMM Single ScannerFootprint TOA/Surface Fluxes and Clouds (SSF) prod-uct from January to August of 1998 and from Marchof 2000 between approximately 388S and 388N are usedto develop CERES–TRMM ADMs. The CERES SSFproduct combines CERES radiances and fluxes withscene identification information inferred from coinci-dent high-spatial-and-spectral-resolution Visible Infra-red Scanner (VIRS) measurements. VIRS, which flewalong with CERES on the TRMM spacecraft, consistsof a five-channel imaging spectroradiometer that mea-sures radiation at 0.63, 1.61, 3.78, 10.8, and 12.0 mmat a spatial resolution of 2.11 km (Kummerow et al.

242 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
1998). VIRS scans in the cross-track direction to a max-imum viewing zenith angle of 488. During the 9 monthsof CERES data acquisition, the SSF product was pro-duced for 269 days. During this period, CERES was incross-track mode for 192 days, RAP mode for 68 days,and along-track mode for 9 days.
The scene identification information derived fromVIRS includes several aerosol and cloud parametersover each CERES footprint (section 3). To optimizespatial matching between CERES measurements andimager-based cloud and aerosol properties, imager re-trievals within CERES fields of view (FOV) are weight-ed by the CERES point spread function (PSF; Smith1994). Also included in the SSF product are meteoro-logical fields for each CERES FOV based on EuropeanCentre for Medium-Range Weather Forecasts(ECMWF) data assimilation analysis (Rabier et al.1998). A comprehensive description of all parametersappearing in the CERES SSF product is provided in theCERES collection guide (Geier et al. 2001).
Footprint location (geodetic latitude and longitude)and viewing geometry are defined using a referencelevel at the surface in the SSF product. Only CERESfootprints that at least partially lie within the VIRS im-ager swath and whose centroids can be located onEarth’s surface are retained. As a result, when CERESis in cross-track mode, only footprints with CERESviewing zenith angles #498 appear in the SSF product.Footprints with CERES viewing zenith angles .498 areonly present when CERES is either in RAP or along-track mode. Because the SSF product is restricted tofootprints whose centroids can be located on Earth’ssurface, the maximum viewing zenith angle of a CERESfootprint is 908. Note that these restrictions are limitedonly to the CERES SSF product—all available CERESfootprints are retained in the CERES ES-8 (ERBE-like)product.
3. CERES ADM scene identification
One of the major advances in CERES–TRMM is theavailability of coincident high-spatial-and-spectral-res-olution VIRS measurements. Previous studies (e.g.,Loeb et al. 2000; Manalo-Smith and Loeb 2001) havedemonstrated that changes in the physical and opticalproperties of a scene have a strong influence on theanisotropy of the radiation at the TOA. Ignoring theseeffects results in large TOA-flux errors (Chang et al.2000). The following sections provide a brief overviewof the CERES cloud mask, aerosol, and cloud propertyretrieval algorithms and the cloud layering and aerosol/cloud property convolution procedures used to providescene identification for CERES footprints.
a. CERES cloud mask
To determine the cloud cover over a CERES footprint,the CERES cloud mask (Trepte et al. 1999; Minnis et
al. 1999) is applied to all VIRS pixels that lie within aCERES footprint. The cloud mask consists of a seriesof threshold tests applied to all five VIRS spectral chan-nels during the daytime (uo , 788, where uo is the solarzenith angle at the VIRS pixel), and three channels(3.78, 10.8, and 12.0 mm) at night. If the observed ra-diances deviate significantly from expected clear-skyradiances in at least one of the available channels, apixel is classified as cloudy. A cloudy pixel can be clas-sified as either glint, ‘‘weak’’ cloud, or ‘‘strong’’ cloud,depending on how much its radiances deviate from thepredicted clear-sky radiances. A clear pixel is classifiedas weak, strong, or aerosol, where ‘‘aerosol’’ can besmoke, dust, ash, oceanic haze, or ‘‘other’’ (e.g., whena combination of aerosols is detected or when algorithmscannot distinguish between two or more aerosol types).Expected clear-sky radiances are determined on a 109latitude–longitude grid. Clear-sky albedo maps (Sun-Mack et al. 1999), directional reflectance models, andbidirectional reflectance functions are used to predictexpected clear-sky radiances in the 0.63-, 1.6-, and 3.75-mm channels (Minnis et al. 1999). Top-of-atmospherebrightness temperatures at 3.75, 10.8, and 12 mm aredetermined using surface skin temperatures and atmo-spheric profiles from numerical weather analyses andempirical spectral surface emissivities (Chen et al.1999). Surface elevation, vegetation type, and up-to-date snow-coverage maps are also used to determine theexpected clear-sky radiances.
The daytime cloud mask involves a three-step anal-ysis of each pixel. The first step is a simple IR test thatflags the pixels that are so cold they must be a cloud.Over ocean, this condition occurs if the VIRS 10.8-mm-channel brightness temperature is more than 208C belowthe ocean surface skin temperature. For most land sur-faces, a pixel is flagged as cloudy if its 10.8-mm-channelbrightness temperature is smaller than the temperatureat 500 hPa. A temperature corresponding to a lowerpressure is used for surface pressures of less than 600hPa. The second step involves a series of three tests thatcompare the pixel to a known background or clear-skyvalue for 0.63-mm reflectance, 10.8-mm brightness tem-perature, and 3.75–10.8-mm brightness temperature dif-ference. If all three tests unanimously determine thepixel to be clear (cloudy), this pixel is labeled strongclear (cloudy). If one or two tests fail, a series of ad-ditional tests that involve the ratio of 1.6-mm to 0.63-mm reflectances and/or the difference between 11-mmand 12-mm brightness temperatures are applied to de-termine whether a pixel is weak or strong clear/cloud.
The first step in the nighttime cloud mask is identicalto the initial daytime brightness temperature test. Thenext step consists of tests that compare a pixel’s bright-ness temperature and brightness temperature difference(3.75–11 mm) to predetermined clear-sky values. If ei-ther test fails to identify the pixel as clear, then a set ofadditional tests with a different set of thresholds is used

FEBRUARY 2003 243L O E B E T A L .
FIG. 1. Schematic of a CERES footprint showing two cloud layersand a clear region. Two distinct cloud layers are defined only if theirmean effective cloud pressures (denoted by dashed lines) are statis-tically different and exceed at least 50 hPa.
to determine whether a pixel is weak clear or is weak/strong cloud (Trepte et al. 1999).
Over very hot land and desert, the VIRS thermalchannels may saturate. To avoid misclassifying clearCERES footprints because of saturated VIRS data, theCERES WN filtered radiance is tested for the possibilitythat the scene may be clear. This test is used when theVIRS thermal radiance in a CERES footprint is flaggedas ‘‘bad’’ and the VIRS 0.63-mm channel contains agood radiance. If the CERES WN filtered radiance ex-ceeds a predetermined threshold, the footprint is re-classified as ‘‘clear’’ and a flux is determined from CE-RES. Otherwise, the scene type is assumed to be ‘‘un-known.’’ The predetermined CERES WN filtered ra-diance is derived from radiative transfer modelsimulations in 58 viewing zenith angle increments overa hot desert scene with a dry tropical atmosphere anda surface temperature of 314 K (D. Kratz 2001, personalcommunication). Between 358S and 358N, saturation oc-curs in less than 0.5% of the observations. Most of theseoccurrences are for daytime scenes over desert duringthe summer months.
b. Aerosol and cloud property retrieval algorithm
Aerosol optical depths from VIRS pixels identifiedas clear are inferred from 0.63-mm VIRS radiancesbased on the retrieval algorithm of Ignatov and Stowe(2002). The algorithm uses a single-channel lookup ta-ble approach based on radiances computed from the‘‘second simulation of the satellite signal in the solarspectrum’’ (6S) radiative transfer model (Vermote et al.1997). Aerosols are assumed to be nonabsorbing andare represented by a lognormal particle size distributionwith a modal radius of 0.1 mm and a standard deviationin the logarithm of particle radius of 2.03 mm. Theseparticle size distribution parameters were determined byfitting Mie calculations for a monomodal lognormal sizedistribution to an empirically derived phase function(Ignatov 1997).
Radiances from VIRS pixels identified as cloudy areanalyzed to estimate parameters that characterize theoptical and physical properties of the cloud. These pa-rameters include cloud visible optical depth, infraredemissivity, phase, liquid or ice water path, cloud-toppressure, and particle effective size. The algorithm con-sists of an iterative inversion scheme to determine thecloud properties that, when input to a plane-parallel ra-diative transfer model, yield the best match to observedradiances at a particular satellite viewing geometry. Adetailed description of the retrieval algorithm and initialresults is provided in Minnis et al. (1995, 1998, 1999).Cloud-top height and pressure are determined from theretrieved cloud-top temperature using the nearest ver-tical temperature and pressure profiles from numericalweather analyses. Liquid and ice water paths are derivedfrom retrievals of cloud optical depth and particle ef-fective size.
In cases in which the cloud algorithm cannot deter-mine a solution for the observed radiances, a secondcloud mask based on Welch et al. (1992) is used toreassess whether the pixel is really cloudy. The pixel isreclassified as clear if this second cloud mask determinesit to be clear. Otherwise, the pixel is labeled as ‘‘cloudyno retrieval.’’ The no-retrieval classification is used forapproximately 4% of all cloudy cases.
c. CERES PSF convolution and cloud layering
Accurate relationships among aerosol, cloud, and ra-diative fluxes require accurate spatial and temporalmatching of imager-derived aerosol and cloud propertieswith CERES broadband radiation data. When CERESis in cross-track mode, VIRS and CERES observe ascene simultaneously. However, scenes observed by CE-RES in the along-track direction at oblique viewing ze-nith angles are observed by VIRS within ø2 min ofCERES. To achieve the closest spatial match betweenCERES and VIRS, the distribution of energy receivedat the CERES broadband detectors must be taken intoaccount when averaging imager-derived properties overthe CERES footprint. This distribution of energy is de-scribed by the CERES point spread function (Smith1994). The PSF accounts for the effects of detector re-sponse, optical FOV, and electronic filters. To determineappropriately weighted and matched aerosol and cloudproperties within CERES FOVs, pixel-level imager-de-rived aerosol and cloud properties are convolved withthe CERES PSF.
Within a CERES footprint, the properties of everycloudy imager pixel are assigned to a cloud layer. Ifthere is a significant difference in cloud phase or ef-fective pressure within a CERES FOV, up to two non-overlapping cloud layers are defined. In general, a singlefootprint may contain any combination of clear area andone or two distinct cloud areas (Fig. 1).
To determine whether two distinct cloud layers arepresent, the imager pixels are initially binned by phase

244 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
into either water or ice categories. Two distinct cloudlayers are present if (i) the mean and standard deviationof effective cloud pressure from the two populations aresignificantly different based on a Student’s t test (at the95% confidence interval) and (ii) the mean cloud ef-fective pressure differs by more than 50 hPa. If bothconditions are met, a threshold effective pressure is de-fined at the midpoint between the effective pressures ofthe lowest and highest cloud layers. The imager pixelsare then recategorized using the threshold effective pres-sure before the PSF weighted-average cloud propertiesare determined for each layer.
If this method fails to identify two distinct cloud lay-ers, a second approach is considered. The pixel-levelcloud effective pressures are sorted from lowest to high-est. The largest gap in this series (exceeding 50 hPa) isused to separate pixels into two cloud layers. The Stu-dent’s t test is then performed on the mean and standarddeviation of the cloud effective pressures for these twopopulations. If they are statistically different, they areconvolved over the footprint as two separate layers. Ifthe pixels fail to meet these minimum requirements, theyare assigned to one layer. When present, multilayer im-ager pixels (e.g., thin cirrus over low cloud) are iden-tified with an overlapped cloud detection algorithm(Baum et al. 1999), but cloud properties are retrievedand convolved as if only one layer were present. Theoverlapped cloud detection algorithm only identifiesmultilayer clouds when a well-defined thin upper-levelcloud layer lies above a well-defined lower-level cloud(Baum et al. 1999).
d. Cloud effective parameters over CERES footprints
The cloud fraction over a CERES footprint is deter-mined from 1 2 Aclr , where Aclr is the imager clear-areafractional coverage. A cloud fraction is determined onlyover the part of a CERES footprint that has imagercoverage. Footprints near the edge of the VIRS swathhave only partial coverage by VIRS. Partial imager cov-erage can also be due to bad imager data or because apixel cannot be determined as clear or cloudy by theCERES cloud mask. All full and partial Earth-view CE-RES FOVs that contain at least one imager pixel arerecorded in the SSF product. The effective mean of aparameter x over a CERES footprint is derived from thePSF-weighted layer mean values as follows:
A x 1 A x1 1 2 2x 5 , (1)A 1 A1 2
where A1 and A2 are the fractional coverage of layers 1and 2, respectively, over a CERES footprint.
Under some conditions, a pixel can be identified ascloudy but the cloud algorithm may fail to determinecloud properties from the observed radiances. Thesecases, referred to as no retrievals, can occur alongsidepixels for which the cloud algorithm does provide cloudproperties. When this pattern occurs, the region in which
retrievals are available is assumed to provide the meancloud properties over the CERES footprint. That is, weassume that the cloud mean properties over the regionof no retrievals are the same as over the region for whichretrievals are available.
Because CERES relies on the imager to identify thescene within a footprint, a minimum amount of imagercoverage and cloud property information is needed toconstruct ADMs. The total fraction Aunk of unknowncloud properties over the footprint is determined by com-bining the imager coverage Aim and the fraction Ancl ofthe cloudy area lacking cloud properties as follows:
A 5 (1 2 A ) 1 A (1 2 A )A ,unk im im clr ncl (2)
where the first term provides the fraction of the footprintwith no imager coverage, and the second term is thefraction of the footprint from the cloudy area with un-known cloud properties. In general, only footprints withAunk # 0.35are used to construct CERES ADMs. Forcloudy scenes over ocean observed at glint angles g ofless than 408, only footprints with Aim $ 0.5 are con-sidered. Here g is the angle between the reflected rayand the specular ray for a flat ocean given by
2 2cosg 5 mm 1 Ï(1 2 m) Ï(1 2 m ) cosf, (3)o o
where m and mo are the cosine of the viewing and solarzenith angles, respectively, and f is the relative azimuthangle. Over all surfaces except snow, cloudy footprintsmust have a valid cloud optical depth in the lower layerto be considered. Although footprints with insufficientimager coverage or cloud property information are notconsidered when constructing the ADMs, a flux estimateis nonetheless provided for these footprints when theADMs are applied to determine TOA fluxes. The strat-egy for estimating fluxes from footprints with insuffi-cient imager or cloud property information is describedin section 5c.
4. CERES ADM development
TOA flux is the radiant energy emitted or scatteredby the Earth–atmosphere per unit area. Flux is relatedto radiance I as follows:
2p p /2
F(u ) 5 I(u , u, f) cosu sinu du df, (4)o E E o
0 0
where uo is the solar zenith angle, u is the observerviewing zenith angle, and f is the relative azimuth angledefining the azimuth angle position of the observer rel-ative to the solar plane (Fig. 2). An ADM is a functionR that provides anisotropic factors for determining theTOA flux from an observed radiance as follows:
pI(u , u, f)oF(u ) 5 . (5)o R(u , u, f)o
Because CERES measures the upwelling radiationfrom a scene at any given time from one or more di-

FEBRUARY 2003 245L O E B E T A L .
FIG. 2. Schematic of Sun–Earth–satellite viewing geometry.
FIG. 3. The u and f angular bin discretization of the CERES–TRMM ADMs.
rections, F (or R) cannot be measured instantaneously.Instead, R is obtained from a set of predetermined em-pirical ADMs defined for several scene types with dis-tinct anisotropic characteristics. Each ADM is con-structed from a large ensemble of radiance measure-ments that are sorted into discrete angular bins and pa-rameters that define an ADM scene type. The ADManisotropic factors for a given scene type j are given by
pI (u , u , f )j oi k lR (u , u , f ) 5 , (6)j oi k l F (u )j oi
where j is the average radiance (corrected for Earth–ISun distance in the SW) in angular bin (uoi, uk, fl), andFj is the upwelling flux in solar zenith angle bin uoi.The set of angles (uoi, uk, fl) corresponds to the mid-point of a discrete angular bin defined by [uoi 6 (Duo)/2, uk 6 (Du)/2, fl 6 (Df)/2], where Duo, Du, and Dfrepresent the angular bin resolution (Fig. 3). Relativeazimuth angles range from 08 to 1808 because the mod-els are assumed to be azimuthally symmetric about theprincipal plane. Angular bins for uo are defined over thesame intervals as for u. In the SW, Rj is a function ofall three angles; in the LW and WN regions, Rj is definedas a function of viewing zenith angle only. Althoughthe dependence of LW and WN anisotropy on solarzenith angle and relative azimuth angle is neglible inmost conditions, Minnis and Khaiyer (2000) showedthat for clear land regions, especially those consistingof rough terrain, LW anisotropy depends systematicallyon relative azimuth angle. This occurs because warm,solar-illuminated surfaces are observed in the back-scattering direction, whereas cooler, shadowed surfacesare observed in the forward scattering direction. Thus,in certain viewing configurations, errors in LW TOAfluxes of up to 7 W m22 can occur in clear mountainousregions (D. Doelling 2002, personal communication).Similar azimuthal dependencies may also occur in bro-ken or thin cloud conditions.
To determine j in Eq. (6), instantaneous radiancesIfor each scene type are first averaged daily in angular
bins one-half of the size of the CERES–TRMM ADMangular bins. In the SW, this means that up to eightsubresolution angular bin average radiances (two solarzenith angle bins 3 two viewing zenith angle bins 3two relative azimuth angle bins) can be used to deter-mine j for every CERES angular bin. In the LW andIWN regions, two subresolution angular bins are avail-able given that the LW and WN ADMs are a functionof viewing zenith angle only. A CERES angular bin isassumed to have sufficient sampling in the SW only ifat least five of the eight subresolution angular bins havebeen observed by CERES. In the LW and WN regions,both subresolution viewing zenith angle bins must havemeasurements. An ADM is defined only when at least75% of the viewing zenith angle and relative azimuthangle bins for a given solar zenith angle bin have suf-ficient sampling. A total of 269 CERES–TRMM daysare used to determine SW mean radiances, whereas only77 RAP and along-track days are used to determinemean LW and WN radiances.
For CERES–TRMM, Earth’s surface covers the entireinstrument FOV (i.e., ‘‘full-Earth’’ view) for u between08 and 808 when u is defined at the surface referencelevel. In this range, radiances are generally available inthe SSF product. However, because at least part of aCERES footprint must lie within the VIRS imager swathto be included in the SSF, the number of footprints fromoblique CERES viewing zenith angles is limited. For ubetween 808 and 908, the footprint centroid intersectsEarth, but the leading edge of the footprint in the along-scan direction lies beyond the Earth tangent point (i.e.,‘‘partial-Earth’’ view). Because imager pixels are un-available beyond Earth’s tangent point, only the part ofthe CERES FOV covered by Earth has imager coverage.As a consequence, scene identification for CERES foot-prints with viewing zenith angles of greater than 808 isunreliable, and these footprints are not used to determinescene-type-dependent ADMs.
To calculate the upwelling flux for a given scene type,average radiances in all angular bins are needed. Thisis unfortunately not always feasible from satellite mea-surements. Average radiances for angular bins with

246 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
FIG. 4. Schematic of observer viewing geometry at reference levelh. Region I corresponds to Earth views; region II corresponds toviewing zenith angles between Earth’s tangent point and the tangentpoint of a cloud; region III corresponds to viewing zenith angles thatview the atmosphere above the cloud.
missing data are estimated by using either directionalreciprocity or radiative transfer theory. Directional rec-iprocity is used only for SW ADM types that are cloudfree (Di Girolomo et al. 1998). The procedure for fillingin angular bins using directional reciprocity is describedin Suttles et al. (1988). For missing angular bins forwhich directional reciprocity is not used, the averageradiance is estimated from a combination of observedradiances in angular bins for which data are availableand theoretical radiances as follows:
I (u , u , f )j oi p q
m n thI (u , u , f )1 oi p q5 I (u , u , f ) , (7)O O j oi k l th[ ]mn I (u , u , f )k51 l51 oi k l
where j(uoi, up, fq) corresponds to the estimated ra-Idiance for an angular bin, j(uoi, uk, fl)corresponds toIan observed mean radiance, and I th is a theoreticallyderived radiance. The summation limits, m and n, cor-respond to the number of angular bins for which j(uoi,Iuk, fl) is available. The theoretical radiances are se-lected from a database of plane-parallel, horizontallyhomogeneous radiative transfer simulations for Earthscenes under a wide range of conditions. For a givensurface type and cloud category (clear ocean, cloud overland, etc.), the specific theoretical radiances in Eq. (7)are determined from the model simulation that mini-mizes the root-mean-square difference in radiance be-tween theory and observations in the angular bins forwhich data are available. In the SW, the radiative trans-fer calculations are based on the discrete-ordinate-meth-od radiative transfer code (DISORT; Stamnes et al.1988); in the LW, radiances are based on a code byGupta et al. (1985). The appendix describes the casesthat compose the theoretical radiance database.
To determine Fj, the usual approach is to integratej explicitly, using a discrete form of Eq. (4). However,I
as pointed out by Loeb et al. (2002), radiance contri-butions from the entire Earth disk and overlying at-mosphere must be taken into account, including radi-ances that emerge from the atmosphere along slant at-mospheric paths beyond Earth’s horizon (i.e., aboveEarth’s tangent point). Ignoring these radiance contri-butions can cause 1–2 W m22 underestimation in TOAflux. To account for these contributions, Loeb et al.(2002) showed that the FOV reference level must bedefined at least at 100 km above Earth’s surface. Toconvert the viewing zenith angle from a surface FOVreference level to a 100-km FOV reference level, thefollowing transformation is used:
r 1 he sfcsinu(h ) 5 sinu(h ), (8)100 sfc1 2r 1 he 100
where u(hsfc) is the viewing zenith angle at the surfacereference level, and re is the mean radius of Earth (whichis set to 6371 km).
At a 100-km FOV reference level, the CERES cen-
troid intersects Earth’s surface for angles u(h100) be-tween 08 and 79.98 (region I in Fig. 4), where u(h100)denotes viewing zenith angles defined at the 100-kmFOV reference level. For this range of angles, j is de-Itermined from the measurements, as described above.For u(h100) of greater than 79.98, the CERES footprintcentroid lies beyond the Earth tangent point, and thenumber of CERES footprints in the SSF at these anglesis limited because of the narrow VIRS swath. For clearscenes, as u(h100) increases beyond 79.98, the radiancedecreases rapidly and eventually approaches zero as CE-RES begins to observe cold space. To estimate radiancesfor u(h100) . 79.98, moderate-resolution transmittancemodel and code (MODTRAN) (Kneizys et al. 1996)simulations for a molecular atmosphere are used. If thescene type is cloudy, however, the MODTRAN molec-ular atmosphere approximation is only used at observerviewing zenith angles for which the FOV centroid liesabove the cloud top (region III in Fig. 4). The cloud-top height is given by the average effective cloud-topheight of all footprints in the ADM class. For mostclouds, the observer viewing zenith angle correspondingto the cloud top is close to that for the Earth tangentpoint [i.e., u(h100) 5 79.98]. For example, for a cloudat 5 km, u(h100) 5 80.178, and, for a cloud at 15 km,

FEBRUARY 2003 247L O E B E T A L .
u(h100) 5 80.78. In the narrow range of angles betweenthe Earth tangent point and cloud top (region II in Fig.4), radiances are extrapolated from radiances at u(h100), 79.98.
The reflected shortwave and emitted longwave ADMfluxes are determined as follows:
SWF (u ; h )j oi 100
N Nl k SW5 w w I (u , u , f ; h ) cosu (9)O Ol k j oi k l 100 k[ ]l51 k51
andNk LW
LWF (h ) 5 w I (u ; h ) cosu , (10)Oj 100 k j k 100 kk51
where wk and wl are Gaussian quadrature weights forintegration over viewing zenith angles from 08 to 908and relative azimuth angles from 08 to 1808, respec-tively. The number of Gaussian quadrature points (i.e.,Nk and Nl) used to evaluate Eqs. (9) and (10) is 200.Radiances at the Gaussian points are determined by lin-early interpolating the mean radiances defined over theCERES angular bins.
Because the viewing geometry and footprint geolo-cation in the SSF product are provided at the surfacereference level, the CERES ADMs are defined so thatthey also correspond to the surface reference level. TheSW and LW ADMs at the surface reference level aregiven by
SWR (u , u , f ; h )j oi k l sfc
SWpI (u , u , f ; h ) rj oi k l sfc e5 (11)
SW 1 2F (u ; h ) r 1 hj oi 100 e 100
andLW 2pI (u ; h ) rj k sfc eLWR (u ; h ) 5 . (12)j k sfc LW 1 2F (h ) r 1 hj 100 e 100
Because j in Eq. (6) is inferred from daily meanIradiances, an estimate of the variability in the SWADMs can be inferred from the standard deviation indaily mean radiances as follows:
s (u , u , u )p I oi k lj« (u , u , u ) 5 t , (13)R oi k l p,nj [ ]F (u ) ÏN (u , u , u )j oi I oi k lj
where tp,n is the 100 (1 2 p)th percentile of the Student’st distribution with n degrees of freedom, and s , andI j
N , are the standard deviation and number of daily meanI j
radiances in an angular bin, respectively. For the 95%confidence interval, p 5 0.025 and n 5 (N 2 1). AI j
similar expression can also be used to estimate the var-iability in LW ADMs. Note that Eq. (13) is only anestimate of the ADM variability—the actual ADM var-iability would require knowledge of the standard de-viation in daily mean anisotropic factors rather than themean radiances.
5. Instantaneous TOA flux estimation
a. Interpolation bias correction
To estimate a flux from a radiance measurement, theappropriate ADM scene type must first be determinedfrom the imager retrievals. Next, Eq. (5) is applied usingan estimate of the anisotropic factor. However, becausethe anisotropy of Earth scenes generally varies with view-ing geometry and cloud/clear-sky properties in a contin-uous manner, whereas the CERES ADMs [Eqs. (11) and(12)] are defined for discrete angular bins and scenetypes, an adjustment to the CERES anisotropic factors isneeded to avoid introducing large instantaneous flux er-rors or sharp flux discontinuities between angular binsor scene types. One way of reducing angular bin dis-cretization errors is to obtain anisotropic factors by lin-early interpolating bin-average ADM radiances [e.g.,
(uoi, uk, fl; hsfc)] and fluxes [e.g., (uoi; hsfc)] toSW
SWI Fj j
each observation angle (uo, u, f) and evaluating aniso-tropic factors from Eq. (6) using the interpolated quan-tities. In addition, interpolation over other parameters thatinfluence anisotropy (e.g., cloud optical depth) can alsobe used. In some cases it may even be advantageous tocombine empirical and theoretical ADMs to estimate theanisotropic factor at a particular angle (e.g., clear oceanSW ADMs in section 6a).
When linear interpolation is used, the instantaneousTOA flux is given by
pI(u , u, f; h )o sfcF(u , u, f; h ) 5 , (14)o sfc R (u , u, f; h )j o sfc
where Rj(uo, u, f; hsfc) represents an anisotropic factorat the surface reference level determined from inter-polated ADM radiances [Ij(uo, u, f; hsfc)] and fluxes[Fj(uo; hsfc)]. Although instantaneous flux errors arelikely reduced with this approach, there is no guaranteethat ensemble averages of the instantaneous fluxes willremain unbiased. A bias in the mean flux will occur iflinear interpolation is used when the actual radiancevaries nonlinearly within an angular bin. It also occurswhen theoretical models are used to supplement em-pirical ADMs. The bias for a specific scene type j inangular bin (uoi, uk, f l) is determined from the differ-ence between the estimated mean flux and the ADMmean flux (determined by direct integration of radianc-es) as follows:
DF (u , u , f ; h )j oi k l sfc
pI(u , u, f; h )o sfc5 2 F (u ; h ), (15)j oi sfc˜7 8R (u , u, f; h )j o sfc ikl
where the first term on the right-hand side is the averageof all instantaneous flux estimates from Eq. (14) fallingin angular bin [uoi 6 (Duo)/2, uk 6 (Duk)/2, fl 6 (Dul)/2] for scene type j, and Fj(uoi; hsfc) is the correspondingADM flux. To remove the bias, a correction term isadded to instantaneous TOA fluxes:

248 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
FIG. 5. Clear-sky ADM anisotropic factors for uo 5 308–408 for individual IGBP types with moderate-to-high tree/shrub coverage.Positive u corresponds to forward scattering directions, whereas negative u corresponds to backscattering.
pI(u , u, f; h )o sfcF9(u , u, f; h ) 5o sfc R (u , u, f; h )j o sfc
1 dF (u , u, f; h ), (16)j o sfc
where
dF (u , u, f; h )j o sfc
DF (u , u , f ; h )I(u , u, f; h ) j oi k l sfco sfc5 2 . (17)I (u , u, f; h )j o sfc I(u , u, f; h )o sfc
˜7 8I (u , u, f; h )j o sfc ikl
When the ensemble average of instantaneous TOA fluxesfrom Eq. (16) is determined, the mean flux is unbiasedbecause (uoi, uk, fl; hsfc) 5 DFj(uoi, uk, fl; hsfc). ThisdFj
procedure is used in all SW TOA flux estimates (exceptover snow). In the LW and WN channels, dFj(u) is closeto zero and is therefore not explicitly accounted for.
b. TOA flux reference level
Based on theoretical radiative transfer calculationsusing a model that accounts for spherical Earth geom-etry, Loeb et al. (2002) recently showed that the optimalreference level for defining TOA fluxes in Earth radi-ation budget studies is approximately 20 km. This ref-erence level corresponds to the effective radiative ‘‘top-of-atmosphere’’ because the radiation budget equationis equivalent to that for a solid body of a fixed diameter
that only reflects and absorbs radiation. The TOA fluxat the 20-km reference level h20 is determined from theflux at the surface reference level as follows:
2reˆ ˆF9(u , u, f; h ) 5 F9(u , u, f; h ) . (18)o 20 o sfc 1 2r 1 he 20
On the CERES SSF product, instantaneous TOA fluxesare provided only for CERES radiances with u(hsfc) #708 and uo # 86.58.
c. Footprints with insufficient imager information
As noted in section 3d, CERES footprints sometimeslack sufficient imager information to define an ADM scenetype because part of the footprint may lie outside the VIRSimager swath, because the imager data are flagged as bad,or because the cloud algorithm fails to determine cloudproperties from the observed radiances (no retrievals). Ifthe total fraction of unknown cloud properties [defined inEq. (2)] exceeds a threshold, the footprint is not used inADM development. It is tempting also to reject such foot-prints when applying the ADMs in determining instan-taneous TOA fluxes, but this rejection could introducesystematic biases in the mean TOA flux if the no-retrievalsassignments are correlated with cloud type (e.g., thin iceclouds). To avoid introducing potential biases in regionalTOA flux estimates caused by systematic rejection ofclouds whose optical properties fall outside the expected

FEBRUARY 2003 249L O E B E T A L .
FIG. 6. Same as in Fig. 5 but for low-to-moderate tree/shrub-coverage ADM class.
FIG. 7. ADM anisotropic factors at uo 5 308–408 for open shrub and barren desert IGBP types.

250 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
FIG. 8. Reflectance relative frequency distribution for open shruband barren desert IGBP types for angular bin uo 5 408–508, u 5 08–108, and f 5 708–908.
range of the retrieval model (resulting in no-retrievals as-signments), instantaneous TOA fluxes are estimated re-gardless of what the total fraction of unknown cloud prop-erties is over the footprint. TOA flux estimates for thesefootprints likely have greater instantaneous errors thanthose derived with complete imager information, but bi-ases in the overall means will be avoided if the errors arerandom.
To determine a TOA flux for a footprint that lacks suf-ficient imager information to define an ADM scene type,ADM radiances [e.g., (uoi, uk, fl; hsfc)] are interpolated
SWI j
to the EOV viewing geometry and are compared with themeasured radiance. The anisotropic factor used to convertthe measured radiance to flux is evaluated from the ADMwhose interpolated radiance most closely matches the mea-sured radiance. To constrain the result, only ADMs havingthe same underlying surface type as the measurement areconsidered as possible candidates. From the 9-month CE-RES–TRMM dataset, footprints with insufficient imagercoverage to determine an ADM scene type occur approx-imately 7% of the time.
d. Mixed scenes
When a CERES footprint contains a mixture of sur-face types (e.g., ocean and land, land and desert), in-stantaneous TOA fluxes are determined using the ADMthat corresponds to the surface type with the highestpercent coverage over the footprint. For example, nearcoastlines, if most of the footprint PSF-weighted areais over ocean, an ocean ADM is used to convert theradiance to flux. In converse, if most of the footprintarea is over land, one of the land ADMs is used. Anexception occurs when SW TOA fluxes are estimatedfrom mixed land–ocean footprints in the sunlight region.In that case, if the glint angle [Eq. (3)] is #408 and thefootprint is covered by more than 5% ocean, the foot-print bidirectional reflectance is assumed to be closerto that for ocean, and one of the ocean ADMs is used.
6. SW ADM scene types
a. Clear ocean
Clear footprints are defined as footprints with $99.9%of VIRS imager pixels identified as cloud free. Separateclear ocean ADMs are defined for four intervals of windspeed corresponding to the 0–25th, 25th–50th, 50th–75th,and 75th–100th percentiles of the wind speed probabilitydensity distribution. These correspond to wind speed in-tervals of approximately ,3.5, 3.5–5.5, 5.5–7.5, and .7.5m s21. The wind speeds, which correspond to the 10-mlevel, are based on Special Sensor Microwave Imager(SSM/I) retrievals (Goodberlet et al. 1990) that have beeningested into the ECMWF data assimilation analysis. Fora given wind speed interval wj, the ADM is defined fol-lowing the procedure outlined in section 4.
Because the anisotropy of clear ocean scenes also de-
pends on aerosol optical depth, this dependence shouldalso be accounted for when estimating SW fluxes overclear ocean. The SSF product provides aerosol opticaldepth retrievals (Ignatov and Stowe 2002), but only inviewing conditions for which the glint angle exceeds 408.It is consequently not possible to construct empiricalADMs stratified by the Ignatov and Stowe (2002) aerosoloptical depth retrievals because no information on howCERES radiances vary with aerosol optical depth in theglint region is available. As an alternative, instantaneousTOA fluxes are first inferred in any viewing geometryfrom wind speed–dependent empirical ADMs. Next, theseTOA flux estimates are adjusted as follows:
pI(u , u, f; h )o sfcF9(u , u, f; h ) 5o sfcthR (w , I )jR(w ; u , u, f; h )j o sfc ˜[ ]R (w , I )th j
1 dF(w ; u , u, f, h ) (19)j o sfc
where R(wj, uo, u, f; hsfc) is determined from the windspeed–dependent ADMs, and Rth (wj, I) and Rth(wj, I) areanisotropic factors inferred from the measured CERESradiance I(uo, u, f; hsfc) and the interpolated ADM radianceI(uo, u, f; hsfc), respectively. To determine Rth(wj, I) andRth(wj, I), CERES radiances I(uo, u, f; hsfc) and I(uo, u,f; hsfc) are compared with lookup tables of theoretical SWradiances stratified by aerosol optical depth. Here, Rth(wj,I) and Rth(wj, I) correspond to the aerosol optical depthfor which the theoretical radiances match the CERES ra-diances. The radiative transfer calculations are based onthe DISORT model (Stamnes et al. 1988) and assumemaritime tropical aerosols based on Hess et al. (1998)evaluated at 24 optical depths. The ocean surface in thecalculations accounts for the bidirectional reflectance ofthe ocean at the five wind speeds that correspond to themidpoints of the CERES ADM wind speed intervals usingthe ocean surface bidirectional reflectance ‘‘OCEABRDF’’

FEBRUARY 2003 251L O E B E T A L .
FIG. 9. The SW flux difference over (a) dark and (b) bright desert, and rms SW flux difference over (c) dark and (d) bright desert attributableto differences between CERES, ScaRaB, and ERBE desert ADMs against solar zenith-angle bin midpoint. Solar zenith angle bins are basedon the ERBE definition given by: 08–25.88, 25.88–36.98, 36.98–45.68, 45.68–53.18, 53.18–60.08, 60.08–66.48, 66.48–72.58, 72.58–78.58, and78.58–84.38.
subroutine from the 6S radiative transfer code (Vermoteet al. 1997). This routine accounts for specular reflection(Cox and Munk 1954), wind speed–dependent whitecaps(Koepke 1984), and below–water surface reflectance (Mo-rel 1988).
Equation (19) can be used to estimate TOA flux inany viewing geometry. However, as the satellite viewinggeometry moves towards the ocean specular reflectiondirection, the radiance increase for a change in angle assmall as 18 can be very large. Because such changesare unresolved by the relatively coarse angular bins usedto define CERES ADMs, instantaneous TOA flux es-timates are generally unreliable for footprints near thespecular reflection direction. As a consequence, the ra-diance-to-flux conversion is not performed in these re-gions. However, ignoring these samples (e.g., by notproviding a TOA flux estimate) can introduce biases inregional mean fluxes because fluxes over cloudy por-tions of a region will contribute disproportionately to
the overall regional mean. To avoid this bias, fluxes incloud-free sunlight are given by the clear ocean windspeed–dependent ADM flux ( ) interpolated at theSWF j
solar zenith angle of the observation.To determine whether a footprint is too close to the
specular reflection direction to provide a reliable fluxretrieval, the derivatives of clear ocean ADM aniso-tropic factors with respect to illumination and viewinggeometries (]Rj/]uo, ]Rj/]u, and ]Rj/]f) are evaluatedin each CERES angular bin. If an observation falls inan angular bin for which one of the derivatives exceedsa threshold value, a radiance-to-flux conversion is notperformed. In this study, a threshold of 0.075 per degreeis used as the cutoff, which corresponds approximatelyto a 408 glint angle threshold.
b. Clear land and desertThe anisotropy of surface-leaving radiances over land
and desert regions depends on several factors, including

252 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
FIG. 10. Anisotropic factors for u 5 08–158 ERBE angular bin against solar zenith angle for CERES, ScaRaB, and ERBE SW ADMs forrelative azimuth angle bins (a) 08–98, (b) 98–308, (c) 308–608, (d) 608–908, (e) 908–1208, (f ) 1208–1508, (g) 1508–1718, and (h) 1718–1808.
vegetation coverage, surface type, and surface hetero-geneity (Roujean et al. 1992). The intervening atmo-sphere modifies the surface anisotropy, particularly atshorter wavelengths (Zhou et al. 2001) and for largeaerosol optical depth (Li et al. 2000). The observedanisotropy of TOA-leaving radiances also depends oninstrument resolution, because clear land scenes becomemore inhomogeneous when observed at larger spatialscales.
The inclined orbit of the TRMM satellite provides aunique opportunity for determining ADMs under all so-lar zenith angle conditions. To account for climatolog-ical differences between surface types, ADMs are firstconstructed for each of the International Geosphere Bio-sphere Programme (IGBP) Global Land Cover types(Loveland and Belward 1997) for which there are suf-ficient data in the Tropics. CERES uses a 109 latitudeby 109 longitude map of IGBP types that covers theglobe (D. A. Rutan and T. P. Charlock 2001, personalcommunication). The IGBP classification scheme is pro-vided in Table 1, along with the fraction of cloud-freeCERES footprints for each IGBP surface-type categoryover the entire 9 months of daytime CERES–TRMMobservations (last column). Over land and desert, barrendesert (16) and open shrubs (7) account for 53% of theclear footprints, IGBP types with low-to-moderate tree/shrub coverage (i.e., IGBP types 9–14) account for 34%,and IGBP types with moderate-to-high tree/shrub cov-
erage (i.e., IGBP types 1–6 and 8) account for 13%. Itis unfortunate that there are not enough data over theTropics to construct ADMs for deciduous needleleafforests (3), permanent wetlands (11), and urban (13)IGBP types.
Figures 5 and 6 show clear-sky ADM anisotropicfactors for uo 5 308–408 for individual IGBP types(colored lines) together with ADMs determined bygrouping all IGBP types falling in the moderate-to-high and low-to-moderate tree/shrub coverage classes,respectively (solid circles). Of interest is that ADManisotropic factors for individual IGBP scene typesshow a remarkable similarity to one another and to thecombined low-to-moderate and moderate-to-high tree/shrub coverage classes. In Fig. 5, deviations in aniso-tropic factors for individual IGBP types from the mod-erate-to-high tree/shrub ADM class occur primarily inangular bins that are poorly sampled. This result isparticularly evident for the closed shrubs (6) and mixedforest (5) IGBP types. The most persistent differencesbetween anisotropic factors from the individual IGBPtypes and the combined low-to-moderate tree/shrubcoverage class occur close to nadir: grassland (10) an-isotropic factors are generally larger by up to 4% (rel-ative difference), whereas anisotropic factors for crops(12) are generally lower by up to 3%. Differences alsoincrease at larger viewing zenith angles, at which thedata sampling is reduced (note that because the CERES

FEBRUARY 2003 253L O E B E T A L .
TABLE 1. IGBP-type classification scheme. Coverage refers to the fractional coverage of a surface type over 1 3 1 km2 area. Height refersto the height of the vegetation. Fraction refers to the cloud-free CERES footprints in each IGBP type over the entire 9 months of daytimeCERES–TRMM observations.
IGBP type Surface typeCoverage
(%)Height
(m)Fraction
(%)
1. Evergreen needleleaf forests2. Evergreen broadleaf forests3. Deciduous needleleaf forests4. Deciduous broadleaf forests5. Mixed forests
TreesTreesTreesTreesTrees
.60
.60
.60
.60
.60
.2
.2
.2
.2
.2
0.601.710.000.550.43
6. Closed shrublands7. Open shrubs8. Woody savannahs9. Savannahs
10. Grasslands
Woody vegetationWoody vegetationHerbaceous and other understory systemsHerbaceous and other understory systemsHerbaceous
.6010–6030–6010–30,10
,2,2.2.2
0.4910.14
2.734.453.97
11. Permanent wetlands12. Croplands13. Urban14. Cropland/natural vegetation mosaics15. Snow and ice
Water and herbaceous/woodyTemporary crops followed by bare soilAnthropogenic structures (e.g., buildings, roads)Mosaic of croplands, forests, shrublands, and grasslandsSnow and ice
.60———
0.024.320.023.570.00
16. Barren desert17. Water bodies18. Tundra19. Fresh snow20. Sea ice
Exposed soil, sand, rocks, or snowOceans, seas, lakes, reservoirs, and riversTundraFresh snowSea ice
,10 15.5550.22
0.011.210.00
SSF only retains footprints within the VIRS swath,oblique viewing zenith angles are only sampled whenCERES is in RAP or along-track mode, which onlyoccurs every third day of data acquisition).
To reduce errors in flux attributable to poorly sampledADM angular bins, the CERES ADMs are constructedusing the low-to-moderate and moderate-to-high tree/shrub coverage classes to determine fluxes over land.For these cases, the variability in the anisotropic factorsis estimated to be less than 0.04 at the 95% confidencelevel for most solar zenith and viewing zenith anglebins. The variability in anisotropic factors is estimatedfrom the variability in daily mean radiances for eachangular bin [Eq. (13)].
ADM anisotropic factors for uo 5 308–408 for twoIGBP types characteristic of desert regions are presentedin Fig. 7. Open shrubs (7) are prevalent over west andcentral Australia, the southwest parts of North America,South America, and Africa, and in central Asia. Barrendeserts (16) are associated primarily with the Saharan,Arabian, Thar, and Gobi deserts. As shown in Fig. 7,ADMs are different for these two IGBP types. TheADMs over barren desert regions are more isotropic,presumably because of the lower vegetation coveragethere. Capderou (1998) showed similar differencesbased on ScaRaB measurements from the Meteor-3-07satellite.
To examine how well the IGBP classification sepa-rates the two classes of desert, relative frequency dis-tributions of SW reflectance were determined in eachangular bin. Shortwave reflectance is inferred from ameasured SW radiance as follows:
r(u , u, f; h )o sfc
2pI(u , u, f; h ) do sfc5 3 100%, (20)1 2m E do o o
where mo 5 cosuo, Eo is the incident solar irradiance(51365 W m22), d corresponds to the Earth–Sun dis-tance at the time of observation, and do is the meanEarth–Sun distance.
Figure 8 shows results for angular bin uo 5 408–508,u 5 08–108, and f 5 708–908. The two desert typeshave a well-defined primary peak at reflectances near15% (open shrubs) and 30% (barren desert), there is asecondary peak in the barren desert distribution near15%, and there is a hint of a secondary peak in the openshrubs distribution at reflectances near 25%. The reasonfor the multiple peaks in the two reflectance distribu-tions may be because the fixed IGBP map cannot ac-count for annual or seasonal changes in vegetation typeand cover. To provide a better separation between thetwo desert types, all CERES footprints in 109 desertregions are reclassified as either ‘‘dark’’ or ‘‘bright’’desert. Regions with CERES SW reflectances closer tothe primary peak of the open shrubs reflectance distri-bution are classified as dark desert, whereas regions withCERES SW reflectances closer to the primary peak ofthe barren desert reflectance distribution are classifiedas bright desert.
The largest difference in ADM characteristics be-tween the reclassified desert ADMs (dark and brightdesert) from the original IGBP classes (open shrubs andbarren deserts) occurs for the bright desert class. In thatcase, the bright desert ADMs are more isotropic than

254 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
FIG. 11. Frequency of occurrence of (a) liquid water and (b) ice cloud ADM classes by cloud fraction and cloud optical depth.
the barren desert ADMs, particularly in the forwardscattering direction, for which differences in anisotropicfactors can reach 6%. In addition, for both desert types,the ADM variability estimate [Eq. (13)] is much smallerfor the new dark and bright desert classes. For thesecases, the variability in the anisotropic factors is esti-mated to be less than 0.03 at the 95% confidence levelfor most solar zenith and viewing zenith angle bins.
Capderou (1998) recently constructed clear desertADMs using measurements from the ScaRaB instru-ment on board the Meteor-3-07 satellite. Using sceneidentification based on the ERBE maximum likelihoodestimation (MLE) technique (Wielicki and Green 1989)to identify clear scenes over the Saharan, Arabian, Na-mib–Kalahari, and Australian deserts, Capderou (1998)derived ADMs for dark and bright desert conditions. Tocompare the ScaRaB and CERES ADMs, the CERESADMs are adjusted to the midpoint of the ScaRaB ADMangular bins (ScaRaB uses the same angular bin defi-nition as ERBE) by interpolating CERES ADM meanradiances ( )and fluxes ( ) to the angular bin mid-SW SWI Fj j
points and inferring the anisotropic factors from the ra-tio. The ScaRaB–CERES ADM differences are con-verted to equivalent SW flux differences by inferringfluxes from the CERES ADM mean radiances ( ) us-SWI j
ing both sets of ADMs in each ScaRaB ADM angular
bin (u . 758 excluded) as though the radiances wereinstantaneous values. Figure 9 shows the resulting SWflux differences and root-mean-square (rms) differencesas a function of solar zenith angle inferred from allangular bins. Also provided are results comparing fluxesbased on ERBE (Suttles et al. 1988) and CERES desertADMs. For solar zenith angle bins ,608, the ScaRaBand ERBE fluxes are generally within 3 W m22 of theCERES fluxes for both the dark and bright desert mod-els. At larger solar zenith angles, both the ScaRaB andERBE fluxes are lower than the CERES fluxes by upto 7 W m22.
The cause for the increase in flux difference with solarzenith angle is unclear. Further examination of theScaRaB and ERBE ADMs reveals some large jumps inthe nadir anisotropic factors at solar zenith angles .608.Figures 10a–h show the CERES, ScaRaB, and ERBEADM anisotropic factors for the u 5 08–158 ERBE an-gular bin against solar zenith angle in each of the ERBErelative azimuth angle bins. Whereas the CERES an-isotropic factors show a smooth dependence on solarzenith angle, the ScaRaB and ERBE models are muchnoisier, in particular at the larger solar zenith angles.The cause for the large variability in the ScaRaB andERBE models may be poor sampling or possibly a solar

FEBRUARY 2003 255L O E B E T A L .
FIG. 12. Overcast ice cloud ADMs with cloud optical depths between (a) 1.0 and 2.5 and (b) 20 and 25 for uo 5 508–608. (c), (d)Differences in anisotropic factors between liquid water and ice clouds (liquid 2 ice) for the same cloud optical depth intervals as (a)and (b).
zenith angle–dependent bias in the MLE scene identi-fication.
c. Clouds over ocean
The ADM scene-type stratification for clouds overocean is provided in Table 2. There are two phase cat-egories, 12 cloud-fraction categories, and 14 cloud-op-tical-depth categories. Phase over a CERES footprint isinferred from VIRS-imager pixel-level phase retrievals(Minnis et al. 1998). Each VIRS-imager pixel within aCERES cloud layer is assigned a phase index of 1 forliquid water and 2 for ice. The pixel-level phase indicesare weighted by the CERES PSF to yield the effectivephase over each layer. The effective phase over the en-tire footprint is determined by area-averaging the phaseindices of each layer using Eq. (1). ADMs for ‘‘liquidclouds’’ are determined from footprints with an effectivephase index ,1.5, and ADMs for ‘‘ice clouds’’ are de-termined from footprints with an effective phase index
$1.5. A separate class for ‘‘mixed-phase’’ footprintswould be desirable, but the sampling is limited, withonly 9 months of CERES–TRMM observations.
Although the number of ocean cloud ADM scenetypes can potentially reach 336 (i.e., 2 3 12 3 14), theactual number of scene types with sufficient data ismuch lower. In most solar zenith angle bins, 72 (or 43%)of the possible liquid water cloud classes have sufficientdata to build an ADM, whereas 57 (or 34%) of thepossible ice cloud classes have sufficient sampling. Fig-ures 11a and 11b show the frequency of occurrence ofliquid water and ice cloud ADM classes, respectively,by cloud fraction and cloud optical depth. When cloudfraction is low, only the thin ADM cloud classes aresampled. As the cloud fraction increases, the range incloud optical depth increases, and more cloud-optical-depth ADM classes appear. A similar broadening incloud-optical-depth distributions with cloud cover wasalso observed by Barker et al. (1996).
When clouds are present, 37% of the footprints fall

256 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
TABLE 2. Shortwave ADM scene-type parameter intervals for clouds over ocean, land, and desert.
Surface typePSF-weightedphase index Cloud fraction Cloud optical depth
Ocean ,1.5 (liquid water).1.5 (ice)
0.1–10, 10–20, 20–30, 30–40,40–50, 50–60, 60–70, 70–80, 80–90, 90–95, 95–99.9,99.9–100
0.01–1.0, 1.0–2.5, 2.5–5.0, 5.0–7.5,7.5–10, 10–12.5, 12.5–15, 15–17.5,17.5–20, 20–25, 25–30, 30–40, 40–50, .50
Moderate–high tree/shrub coverage;low–moderate tree/shrub coverage,dark desert; bright desert
,1.5 (liquid water).1.5 (ice)
0.1–25, 25–50, 50–75, 75–99.9, 99.9–100
0.01–2.5, 2.5–6, 6–10, 10–18, 18–40,.40
FIG. 13. The SW ADM anisotropic factors interpolated to ERBE angular bins for overcast ice clouds as a function of cloud opticaldepth, viewing zenith angle, and relative azimuth angle for uo 5 53.1–60. Circles denote the ERBE overcast ADM.
in the overcast (99.9%–100%) cloud-fraction class. Ifonly footprints dominated by liquid water clouds (i.e.,footprint effective phase index ,1.5) are considered,the fraction of overcast footprints drops to 25%, as com-pared with 72% for footprints dominated by ice clouds(i.e., footprint effective phase index $1.5). Overall, thefrequency of occurrence for the liquid water cloud classis 75%, as compared with 25% for the ice cloud class.
Examples of ADMs for thin (cloud optical depths of1.0–2.5) and thick (cloud optical depths of 20–25) iceclouds for uo 5 508–608 are provided in Figs. 12a,b.For the thin-cloud case (Fig. 12a), the anisotropic factorranges from 0.6 to 3.3 as compared with 0.9 to 1.6 forthe thick-cloud case. The largest sensitivity to cloudoptical depth occurs at near-nadir views, for which theanisotropic factor changes by 50%. Figures 12c,d showdifferences in anisotropic factors between liquid water
and ice cloud ADMs for the same cloud-optical-depthintervals as in Figs. 12a,b. For both the thin-cloud (Fig.12c) and thick-cloud (Fig. 12d) conditions, anisotropicfactors for liquid water clouds exceed those of ice cloudsin the forward and backscattering directions but aresmaller at relative azimuth angles in the side scatteringdirection. A similar dependence was observed fromPOLDER measurements by Loeb et al. (2000). As ex-pected, the magnitude of the differences is smaller forthe thicker-cloud case (Fig. 12d) because increased mul-tiple scattering in these clouds reduces the sensitivityto differences in liquid water and ice cloud phase func-tions. However, because albedos and fluxes are so muchlarger for the thicker clouds, even small errors in an-isotropy can cause large albedo errors. For the cloudcases shown in Fig. 12, ignoring phase would result inmean albedo errors of up to 0.05.

FEBRUARY 2003 257L O E B E T A L .
FIG. 14. Daytime clear-sky LW and WN ADMs for the 33d–66th-percentile interval of precipitable water. ADMs are shown for the LWchannel over (a) ocean, (b) land, and (c) desert and for the WN channel over (d) ocean, (e) land, and (f ) desert. Here DTs is the verticaltemperature difference, which corresponds to the lapse rate in the first 300 hPa of the atmosphere above the surface.
Figure 13 compares CERES ADMs for overcast iceclouds for each of the 14 cloud-optical-depth intervalstogether with the one ERBE overcast ADM. For thiscomparison, the CERES ADMs are interpolated to themidpoints of the ERBE angular bins (Suttles et al. 1988).The ERBE overcast model most closely follows the CE-RES ADM for cloud-optical-depth interval 12.5–15.The ERBE anisotropic factors exceed CERES values byup to 60% for thin clouds near nadir; for viewing zenithangles between 408 and 608, anisotropic factors are in-sensitive to cloud optical depth, consistent with theo-retical simulations by Davies (1984).
Because of the strong sensitivity in the anisotropicfactors to cloud properties (i.e., cloud optical depth andcloud fraction), the ADM lookup tables under cloudyconditions are interpolated not only to the measurementviewing geometry, but also to the effective cloud frac-tion and cloud optical depth over the footprint. Theinterpolation procedure is the same as that outlined insection 5a but involves interpolation over two extra var-iables.
d. Clouds over land
The ADM classes for cloudy conditions over land arestratified by the four land types considered for clear
conditions (section 6b), two cloud-phase classes (de-fined in the same manner as for clouds over ocean), fivecloud-fraction classes and six cloud-optical-depth clas-ses (Table 2). Because only 9 months of CERES–TRMM measurements are available, the number of clas-ses over each of the land types is reduced relative tothat over ocean to ensure a sufficient number of samplesto construct an ADM.
e. Snow
Because the TRMM orbit is restricted to 358S–358N,sampling under snow conditions is insufficient for de-veloping empirical ADMs. As an alternative, fluxes un-der snow conditions for CERES–TRMM are determinedfrom theoretical ADMs based on 12-stream DISORT(Stamnes et al. 1988) model calculations. In the cal-culations, the surface bidirectional reflectance of snowis accounted for explicitly by inserting a packed snowlayer at the bottom of the atmosphere (0–1-km altitude).Within the snow layer, ice particles are assumed to bespheres, having a lognormal size distribution with amode radius of 50 mm and a standard deviation of 2.0mm. The concentration of ice particles is 1.0 3 1012
m23, which corresponds to a density of ø0.5 Mg m23.Ice refractive indices from Warren (1984) are used to

258 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
TABLE 3. Longwave and WN ADM scene-type parameter intervals for clear, broken, and overcast scenes.
Cloudcategory Surface
Precipitablewater percentile
Cloud fraction(%)
Vertical temperaturechange percentile
Cloud IRemissivitypercentile Total
Clear OceanLandDesert
#3333–66$66
#0.1 0–2525–5050–75.75
Inversion (DTs , 08C)
— 45
Broken OceanLandDesert
#3333–66$66
0.1–2525–5050–7575–99.9
0–2020–4040–6060–80.80
Inversion (DTc , 08C)
0–2525–5050–75.75
288 (O)288 (L)288 (D)
Overcast All ,3333–66$66
$99.9 0–2020–4040–6060–8080–90.90
Inversion (DTc , 08C)
0–55–10
10–2525–5050–75.75
126
compute the optical properties of ice particles from Mietheory. The atmosphere is divided into six layers. Ab-sorption by water vapor, ozone, carbon dioxide, andoxygen are based on k-distribution tables (Kato et al.,1999) based on a midlatitude summer atmosphere(McClatchey et al. 1972).
Under cloudy conditions, a liquid water cloud layerbetween 1 and 2 km is inserted above the snow layerin the DISORT model calculations. The cloud particlesare also taken to be spheres, having a lognormal dis-tribution with a mode radius of 10 mm and standarddeviation of 1.42 mm. The cloud optical depth is fixedat 10. Radiances are computed at 18 solar zenith angles,51 viewing zenith angles, and 61 relative azimuth an-gles. TOA fluxes from the theoretical ADMs are deter-mined using Eq. (14).
7. LW and WN ADM scene types
For CERES, LW and WN ADMs are defined inde-pendent of the SW ADMs. This approach differs fromthat of ERBE, which uses the same scene types for boththe SW and LW ADMs. CERES LW and WN ADMsare determined for scene types defined by meteorolog-ical parameters and imager-based cloud parameters thatinfluence LW and WN radiance anisotropy of Earthscenes. As a result, the ERBE method of defining LWADMs by colatitude is not used in CERES since lati-tudinal and seasonal variations in anisotropy are ac-counted for on a footprint-by-footprint basis from col-located meteorological and imager-based parameters.Also, because the cloud retrieval algorithm uses a dif-ferent method at night than it does during the daytime,CERES ADMs are determined separately for daytimeand nighttime conditions.
The LW and WN ADMs are divided into broad cat-
egories based on cloud cover (clear, broken, and over-cast) and surface type (ocean, land, and desert). Eachof these categories is further stratified by intervals ofprecipitable water, cloud fraction, vertical temperaturechange, and cloud infrared emissivity (Table 3). To en-sure that there is sufficient sampling for every scenetype, the parameters are stratified according to their fre-quency distributions using fixed percentile intervalsrather than fixed discrete intervals. The percentile ap-proach allows the data to define the width and rangeused to stratify a given parameter, thereby ensuring thateach ADM scene type is adequately sampled.
a. LW and WN ADM scene-type parameters
Cloud categories are based on the imager-derivedcloud fraction over the CERES footprint. A footprint isassumed to be clear when the cloud fraction is #0.1%.‘‘broken’’ when the cloud fraction is between 0.1% and99.9%, and ‘‘overcast’’ when the cloud fraction is$99.9%. In Table 3, ocean is defined by IGBP type 17(Table 1), desert is defined by IGBP types 7 and 16,and land is all IGBP types except 7, 15, 16, 17, 19, and20. Over snow, empirically derived LW and WN ADMsare unavailable because of inadequate sampling. There-fore, fluxes for footprints over snow are estimated inthe same manner as footprints with insufficient imagerinformation (section 5c).
Precipitable water in Table 3 is the water vapor burdenfrom the surface to the TOA. For scenes over water, thedata source for precipitable water is the SSM/I dataset,if available. If SSM/I data are unavailable or the foot-print is over land, ECMWF precipitable water is used.Under clear conditions, the vertical temperature change(DTs) corresponds to the lapse rate in the first 300 hPaof the atmosphere above the surface. It is computed by

FEBRUARY 2003 259L O E B E T A L .
FIG. 15. The LW and WN anisotropic factors for the 08–108 viewing zenith angle bin over desert as a function of DTs in each precipitablewater interval. Anisotropic factors are provided for (a) daytime LW, (b) nighttime LW, (c) daytime WN, and (d) nighttime WN. Physicalvalues of DTs corresponding to each percentile interval are provided in Table 4.
subtracting the air temperature at the pressure level thatis 300 hPa below the surface pressure (i.e., surface pres-sure minus 300 hPa) from the imager-based surface skintemperature. A separate ADM class is produced whenthere is an inversion in the boundary layer (DTs , 08C).When clouds are present in a CERES footprint, verticaltemperature change (DTc) refers to the difference intemperature between the surface and cloud; DTc is com-puted by subtracting the imager-based effective (equiv-alent blackbody) cloud-layer temperature from the un-derlying skin temperature. If the imager-based surfaceskin temperature is unavailable (e.g., overcast condi-tions), a skin temperature from the ECMWF data as-similation model is used.
The mean infrared emissivity for a cloud layer isdefined as the ratio of the difference between the ob-served and clear-sky VIRS 11-mm radiances to the dif-ference between the cloud emission and clear-sky ra-diances. The clear-sky radiance is determined eitherfrom surrounding cloud-free observations when avail-able, or from ECMWF surface skin temperature, surface
emissivity maps, and ECMWF vertical profiles of tem-perature and humidity. The cloud emission radiance isdefined as the blackbody radiance at the radiating tem-perature of the cloud. The mean infrared emissivity,cloud radiating temperature, and effective particle sizeare determined using an iterative procedure that mini-mizes the difference between calculated and observedVIRS radiances in the visible, solar-infrared, and infra-red channels. The procedure relies on parameterizationsdescribed in Minnis et al. (1998) to relate cloud opticaldepth, particle size, and cloud infrared emissivity. Be-cause scattering tends to block radiation from the warm-er, lower portions of the cloud, the observed radiancecan be less than the cloud emission radiance (i.e., thecloud appears colder than it really is). In these cases,the effective emissivity will be greater than 1. This oc-curs most often for optically thick clouds at large imagerviewing zenith angles and for FOVs containing opticallythick clouds that have an equivalent blackbody tem-perature that is within a few degrees of the clear-skytemperature (Minnis et al. 1998).

260 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
TABLE 4. The DTs (8C) intervals corresponding to each percentile interval in Fig. 14 for clear daytime and nighttime desert.
DTs
percentileinterval
Daytime precipitablewater interval (cm)
,1.23 1.23–2.0 .2
Nighttime precipitablewater interval (cm)
,1.07 1.07–1.82 .1.82
,2525–5050–75.75
0.0–18.018.0–28.428.4–38.9
.38.9
0.0–25.525.5–35.535.5–43.2
.43.2
0.0–28.728.7–39.139.1–46.6
.46.6
0.0–5.85.8–10.1
10.1–14.9.14.9
0.0–10.010.0–14.314.3–18.9
.18.9
0.0–14.414.4–18.718.7–22.5
.22.5
FIG. 16. The LW anisotropic factors for the 08–108 viewing zenith angle bin for broken clouds as a function of cloud emissivity in eachcloud fraction interval: (a) low clouds over dry ocean regions (0–20th DTc percentile interval and 0–33d precipitable water interval), (b)high clouds over dry ocean regions (80th–100th DTc percentile interval and 0–33d precipitable water interval), (c) low clouds over moistland regions (0–20th DTc percentile interval and 66th–100th precipitable water interval), and (d) high clouds over moist land regions (80th–100th DTc percentile interval and 66th–100th precipitable water interval). Physical values corresponding to each percentile interval areprovided in Table 5.
b. ADM sensitivity to scene type
Figure 14 provides examples of LW and WN ADMsfor clear scenes over ocean, land, and desert as a func-tion of DTs for the 33d–66th-percentile interval of pre-cipitable water. The DTs intervals correspond to the 0–25th-, 25th–50th-, 50th–75th-, and .75th-percentile in-
tervals (there was not sufficient sampling to constructADMs for inversion conditions). The range of DTs ismuch smaller over ocean than it is over land and desertbecause DTs has a much narrower distribution overocean. As DTs increases, LW and WN anisotropy in-creases. For u , 708, the largest sensitivity in the LW

FEBRUARY 2003 261L O E B E T A L .
TABLE 5. The « intervals corresponding to each percentile interval considered in Fig. 15 for broken cloud conditionsover ocean and land.
« percentileinterval
Low clouds (dry ocean regions)
f 5 25%–50%
DT 5 0.08–5.88Cc
f 5 50%–75%
DT 5 0.08–6.68Cc
f 5 75%–99.9%
DT 5 0.08–8.48Cc
High clouds (dry ocean regions)
f 5 25%–50%
DT . 148Cc
f 5 50%–75%
DT . 14.98Cc
f 5 75%–99.9%
DT . 19.28Cc
,2525–5050–75.75
,0.3890.389–0.5130.513–0.650
.0.650
,0.4540.454–0.5810.581–0.716
.0.716
,0.5950.595–0.7330.733–0.859
.0.859
,0.2810.281–0.4030.403–0.550
.0.550
,0.3510.351–0.5010.501–0.657
.0.657
,0.4360.436–0.6140.614–0.788
.0.788
« percentileinterval
Low clouds (moist land regions)
f 5 25%–50%
DT 5 0.08–7.88Cc
f 5 50%–75%
DT 5 0.08–8.78Cc
f 5 75%–99.9%
DT 5 0.08–13.18Cc
High clouds (moist land regions)
f 5 25%–50%
DT . 32.88Cc
f 5 50%–75%
DT . 34.68Cc
f 5 75%–99.9%
DT . 44.28Cc
,2525–5050–75.75
,0.5840.584–0.7090.709–0.814
.0.814
,0.6530.653–0.7650.765–0.856
.0.856
,0.7930.793–0.8850.885–0.954
.0.954
,0.2390.239–0.3580.358–0.508
.0.508
,0.3080.308–0.4490.449–0.628
.0.628
,0.4570.457–0.6910.691–0.894
.0.894
FIG. 17. The LW anisotropic factors for the 08–108 viewing zenith angle bin for overcast clouds as a function of cloud emissivity in eachprecipitable water interval: (a) low clouds (0–20th DTc percentile interval) and (b) high clouds (80th–100th DTc percentile interval). Physicalvalues corresponding to each percentile interval are provided in Table 6.
anisotropic factors to DTs occurs close to nadir, whereit varies by ø2%, which corresponds to a LW flux var-iation of ø6 W m22. Sensitivity to DTs is more pro-nounced for the WN channel because of its larger de-pendence on surface temperature.
LW and WN anisotropies change between daytime andnighttime conditions over clear desert regions (Figs. 15a–d). Because daytime surface temperatures are so muchlarger than those at night, the magnitude of DTs in eachpercentile interval is greater during the daytime (Table 4).The daytime LW and WN anisotropy is consequentlystronger than at night. Based on these results, ignoringdaytime/nighttime differences in anisotropy would lead toa 5 W m22 bias in the day–night LW flux difference.
In broken cloud conditions, LW anisotropy shows aslight dependence on cloud infrared emissivity (Fig. 16,
Table 5). Sensitivity to « increases with cloud cover andcloud height, particularly over moist land. In general, LWanisotropy increases with decreasing «. This trend is mostpronounced for overcast conditions, as illustrated in Fig.17 (see also Table 6), which shows nadir anisotropic fac-tors for low and high overcast clouds. Clouds that occurin the wettest (largest precipitable water) regions with thelargest DTc show the strongest sensitivity to «. Anisotropicfactors range from 1.02 for thick high clouds to 1.158 forthin high clouds in the moist regions. This ø13% differ-ence in anisotropic factor corresponds to a difference inLW flux of 25 W m22 for these clouds.
8. SummaryThe new generation of radiation budget products from
CERES merges SW, LW, and WN TOA radiative fluxes

262 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
TABLE 6. The « intervals corresponding to each percentile interval considered in Fig. 16 for overcast conditions(PW is precipitable water).
« percentileinterval
Low clouds
PW , 2.57
DT 5 08–11.88Cc
PW 5 2.57–4.63
DT 5 08–13.98Cc
PW . 4.63
DT 5 08–32.88Cc
High clouds
PW , 2.57
DT . 53.18Cc
PW 5 2.57–4.63
DT . 64.98Cc
PW . 4.63
DT . 82.58Cc
0–55–10
10–2525–5050–75.75
,0.7040.704–0.7980.798–0.9160.916–0.9870.987–1.013
.1.013
,0.5820.582–0.6970.697–0.8730.873–0.9740.974–1.011
.1.011
,0.5090.509–0.6190.619–0.8090.809–0.9440.944–0.998
.0.998
,0.3470.347–0.5010.501–0.8500.850–0.9860.986–1.002
—
,0.3590.359–0.5470.547–0.9110.911–0.9980.998–1.004
—
,0.7820.782–0.9800.980–0.9990.999–1.003
——
from the CERES instrument with coincident imager-derived cloud and aerosol parameters and meteorolog-ical information from the European Centre for Medium-Range Weather Forecasts data assimilation analysis.Conversion of measured broadband radiances to TOAradiative fluxes requires models of the angular depen-dence of reflected and emitted radiance under all at-mospheric and surface conditions. CERES uses coin-cident broadband and narrowband imager measurementsto construct angular distribution models that are func-tions of scene-type parameters that have a strong influ-ence on the anisotropy (or angular variation) of Earth’sradiation field at the TOA. The CERES–TRMM ADMsare constructed from 9 months of CERES and VIRSimager measurements from the TRMM spacecraft,which has a 358 inclined orbit between 358S and 358N.Because of TRMM’s unique orbit, the ADMs are basedon measurements that cover the full range of solar zenithangles over the Tropics.
For clear scenes, CERES–TRMM SW ADMs are de-fined over ocean, land, and desert, whereas theoreticalADMs are used over snow. Clear-sky ocean models area function of wind speed and use a theoretical adjust-ment to account for aerosol-optical-depth variations.Over land, ADMs are divided into two classes: mod-erate-to-high tree/shrub coverage and low-to-moderatetree/shrub coverage. ADMs for individual IGBP typesbelonging to these two categories show a remarkablesimilarity, although albedos are very different. DesertADMs are defined for dark and bright desert regions byslightly modifying the open shrub and barren desertIGBP types based on SW reflectance relative frequencydistributions. The new desert ADMs are similar to mod-els developed by Capderou (1998) using ScaRaB data,except at larger solar zenith angles for which differencesbetween the ScaRaB and CERES ADMs lead to fluxdifferences of up to 7 W m22. ADMs for cloudy con-ditions are defined for several classes stratified by sur-face type, cloud fraction, cloud phase, and cloud opticaldepth. ADM sensitivity to cloud optical depth and phaseare shown to be particularly important. For example,variations in anisotropy as a function of cloud opticaldepth can be as large as 50%.
LW and WN ADMs are provided as a function ofviewing zenith angle for scene types defined by surface
type, cloud fraction, precipitable water, lapse rate, andcloud infrared emissivity. To ensure sufficient data forall angular bins and scene types, the parameters arestratified according to their frequency distributions us-ing fixed percentile intervals rather than fixed discreteintervals. The largest sensitivity to the various ADMscene-type parameters occurs at nadir-viewing zenithangles. In general, the anisotropy over moist land re-gions is larger than over ocean, both in clear and cloudyconditions. LW and WN anisotropies increase with pre-cipitable water and atmospheric lapse rate for clearscenes; they increase with cloud cover, the differencebetween surface and cloud-top temperature, and de-creasing cloud infrared emissivity for cloudy scenes.
Acknowledgments. The authors thank Dr. Ping Yangfor making his ice-crystal single-scattering parametersavailable and Ms. S. K. Nolan for developing the CE-RES SSF product subsetting routines. This research wasfunded by the Clouds and the Earth’s Radiant EnergySystem (CERES) project under NASA Grant NAG-1-2318.
APPENDIX
Description of Radiance Model DatabaseUndersampled ADM angular bins are estimated from
a combination of the observed radiances in angular binsfor which sampling is adequate and radiative transfermodel simulations drawn from a theoretical database.The specific model simulation selected from the data-base is that which most closely resembles the bidirec-tional reflectance of the observations in angular bins forwhich data are available. The procedure, described insection 4, is used mainly to fill in missing-data angularbins between 808 and 908 (at the surface reference level).At viewing zenith angles beyond Earth’s tangent point,MODTRAN simulations for a molecular atmosphere areused. This section describes the radiance model databaseused to estimate radiances in missing angular bins thatintersect Earth.
a. SW radiative transfer model database
SW radiative transfer calculations are based on theDISORT code (Stamnes et al. 1988). Radiances are de-

FEBRUARY 2003 263L O E B E T A L .
TABLE A1. Shortwave theoretical radiance database properties (ws 5 wind speed).
Cloud/surface Surface properties Aerosol or cloud properties
Clear ocean Ocean surface (Vermote et al. 1997) ws 5 1.0, 2.5,5.0, 7.5, 10 m s21
Maritime tropical (Hess et al. 1998) (24 aerosoloptical depths from 0.01 to 1.0)
Clear land and desert Forest, grass, savannah, alkali flat, bare field, prai-rie, desert (Kriebel 1977; Ahmad and Deering1992)
Continental average, desert (Hess et al. 1998) (24aerosol optical depths from 0.01 to 1.0)
Cloud over ocean Ocean surface (Vermote et al. 1997) ws 5 5.0 m s21 Stratus (Hess et al. 1998) (24 cloud opticaldepths from 0.1 to 200)
Cloud over land and desert Forest, grass, prairie, desert (Kriebel 1977; Ahmadand Deering 1992)
Cold cirrus (Baum et al. 2000) (24 cloud opticaldepths from 0.1 to 200)
termined at 36 viewing zenith angles both at the topand bottom of the atmosphere, 19 relative azimuth an-gles, and 18 solar zenith angles. A minimum of 16streams are used in clear conditions, and a minimum of48 streams are used for cloudy conditions. The calcu-lations are performed at 40 wavelengths. Moleculartransmission at each wavelength is based on the MOD-TRAN 3.7 model (Kneizys et al. 1996). The atmosphereis divided into four homogeneous layers consisting ofa boundary layer, a cloud layer, a tropospheric layer,and a stratospheric layer. Contributions from a surfacebidirectional reflectance model are included explicitly(outside of DISORT) by adding the surface direct andsurface diffuse radiance contributions to the TOA ra-diance contribution from the atmosphere determined byDISORT. With this approach, several different surfacebidirectional reflectance models can be coupled with thesame DISORT result, thereby reducing the number ofDISORT runs needed.
Table A1 summarizes the input parameters used inthe radiative transfer model calculations. Clear condi-tions over ocean assume a maritime tropical aerosol(Hess et al. 1998) and an ocean surface bidirectionalreflectance at five wind speeds using the OCEABRDFsubroutine from the 6S radiative transfer code (Vermoteet al. 1997). This routine accounts for specular reflection(Cox and Munk 1954), wind speed–dependent white-caps (Koepke 1984), and below-water-surface reflec-tance (Morel 1988). For clear land and desert, the con-tinental average and desert aerosol models of Hess etal. (1998) are used. Surface bidirectional reflectancemeasurements of Kriebel (1977) over forest, grass, andsavannah and the parameterizations of Ahmad and Deer-ing (1992) over alkali flat, bare field, prairie, and desertare used to model surface bidirectional reflectances overland and desert. Liquid water clouds are modeled usingthe stratus (maritime) model of Hess et al. (1998). Iceclouds are composed of a mixture of crystal habits in-cluding bullet rosettes, aggregates, and hollow columns(Yang et al. 2000) with a size distribution given by the‘‘Ci (Cold)’’ case described in Baum et al. (2000).
To simulate the bidirectional reflectance of brokenclouds, the clear and cloudy radiances at each angle arelinearly weighted by cloud fraction. The specific cloudfractions used correspond to the midpoint of the ADMcloud fraction intervals (Table 2).
b. LW and WN radiative transfer model database
LW and WN radiative transfer calculations are basedon a radiative transfer code by Gupta et al. (1985). Themodel determines broadband radiances over the 5–50-mm range with a 10 cm21 resolution. Atmospheric trans-mittance in each spectral interval is calculated using aquasi-random band model (Wyatt et al. 1962), withspectral parameters based on the line parameter com-pilation of McClatchey et al. (1973), and continuumabsorption by water vapor based on Roberts et al.(1976). The model consists of 15 atmospheric layersbetween the surface and 10 hPa. Atmospheric profilesinclude the U.S. Standard Atmosphere, 1976; the trop-ical, midlatitude summer/winter, and subarctic summer/winter atmospheric profiles of McClatchey et al. (1972);and atmospheric profiles from 1-yr global NOAA-6 andNOAA-7 (NOAA is National Oceanic and AtmosphericAdministration) Television and Infrared ObservationSatellite Operational Vertical Sounder (TOVS) datasetsover the tropical western Pacific, Amazon, Saudi Arabia,North Atlantic, midlatitude United States, North Sea,northern Canada, and Antarctica. Cloud-top heights ineach location are specified at four levels, depending onthe location. Broken clouds are simulated by linearlyweighting the clear and overcast radiances.
REFERENCES
Ahmad, S. P., and D. W. Deering, 1992: A simple analytical functionfor bidirectional reflectance. J. Geophys. Res., 97, 18 867–18 886.
Barker, H. W., B. A. Wielicki, and L. Parker, 1996: A parameterizationfor computing grid-averaged solar fluxes for inhomogeneous ma-rine boundary layer clouds. Part II: Validation using satellitedata. J. Atmos. Sci., 53, 2304–2316.
Barkstrom, B. R., 1984: The Earth Radiation Budget Experiment(ERBE). Bull. Amer. Meteor. Soc., 65, 1170–1186.
Baum, B. A., P. Yang, and A. Heymsfield, 1999: Overlapping cloudlayer detection and analysis using MODIS Airborne Simulatorimagery. Preprints, 10th Conf. on Atmospheric Radiation, Mad-ison, WI, Amer. Meteor. Soc., 230–233.
——, D. P. Kratz, P. Yang, S. C. Ou, Y. Hu, P. F. Soulen, and S.-C.Tsay, 2000: Remote sensing of cloud properties using MODISairborne simulator imagery during SUCCESS. Part I: Data andmodels. J. Geophys. Res., 105, 11 767–11 780.
Buriez, J. C., and Coauthors, 1997: Cloud detection and derivationof cloud properties from POLDER. Int. J. Remote Sens., 18,2785–2813.
Capderou, M., 1998: Determination of the shortwave anisotropic

264 VOLUME 42J O U R N A L O F A P P L I E D M E T E O R O L O G Y
function for clear-sky desert scenes from ScaRaB data: Com-parison with models issued from other satellite data. J. Appl.Meteor., 37, 1398–1411.
Chambers, L. H., B. A. Wielicki, and N. G. Loeb, 2001: Shortwaveflux from satellite-measured radiance: A theoretical study overmarine boundary layer clouds. J. Appl. Meteor., 40, 2144–2161.
Chang, F.-L., Z. Li, and A. P. Trishchenko, 2000: The dependence ofTOA reflectance anisotropy on cloud properties inferred fromScaRaB satellite data. J. Appl. Meteor., 39, 2480–2493.
Chen, Y., S. Sun-Mack, P. Minnis, W. L. Smith Jr., and D. F. Young,1999: Surface emissivity derived for infrared remote sensingfrom satellites: Preprints, 11th Conf. on Satellite Meteorologyand Oceanography, Madison, WI, Amer. Meteor. Soc., 512–515.
Cox, C., and W. Munk, 1954: Some problems in optical oceanography.J. Mar. Res., 14, 63–78.
Davies, R., 1984: Reflected solar radiances from broken cloud scenesand the interpretation of scanner measurements. J. Geophys.Res., 89, 1259–1266.
Di Girolamo, L., T. Varnai, and R. Davies, 1998: Apparent breakdownof reciprocity in reflected solar radiances. J. Geophys. Res., 103,8795–8803.
Diner, D. J., and Coauthors, 1999: New directions in earth observing:Scientific applications of multiangle remote sensing. Bull. Amer.Meteor. Soc., 80, 2209–2228.
Geier, E. B., R. N. Green, D. P. Kratz, P. Minnis, W. F. Miller, S. K.Nolan, and C. B. Franklin, cited 2001: Single satellite footprintTOA/surface fluxes and clouds (SSF) collection document.[Available online from http://asd-www.larc.nasa.gov/ceres/ASDceres.html.]
Geogdzhayev, I. V., M. I. Mishchenko, W. B. Rossow, B. Cairns, andA. A. Lacis, 2002: Global two-channel AVHRR retrievals ofaerosol properties over the ocean for the period of NOAA-9 ob-servations and preliminary retrievals using NOAA-7 and NOAA-11 data. J. Atmos. Sci., 59, 262–278.
Goodberlet, M., C. Swift, and J. Wilkerson, 1990: Ocean surfacewind speed measurements of Special Sensor Microwave/Imager(SSM/I). IEEE Trans. Geosci. Remote Sens., GE-28, 828–832.
Gupta, S. K., S. N. Tiwari, C. S. Vemuru, and J. T. Suttles, 1985:Infrared limb-darkening effects for the Earth–atmosphere sys-tem. AIAA J., 23, 405–409.
Hess, M., P. Koepke, and I. Schult, 1998: Optical properties of aero-sols and clouds: The software package OPAC. Bull. Amer. Me-teor. Soc., 79, 831–844.
Ignatov, A., 1997: Estimation of the aerosol phase function in back-scatter from simultaneous satellite and sun-photometer mea-surements. J. Appl. Meteor., 36, 688–694.
——, and L. L. Stowe, 2002: Aerosol retrievals from individualAVHRR channels. Part I: Retrieval algorithm and transition fromDave to 6S radiative transfer model. J. Atmos. Sci., 59, 313–334.
Kandel, R., and Coauthors, 1998: The ScaRaB earth radiation budgetdataset. Bull. Amer. Meteor. Soc., 79, 765–783.
Kato, S., T. P. Ackerman, J. H. Mather, and E. E. Clothiaux, 1999:The k-distribution method and correlated-k approximation for ashortwave radiative transfer model. J. Quant. Spectrosc. Radiat.Transfer, 62, 109–121.
Kneizys, F. X., and Coauthors, 1996: The MODTRAN 2/3 report andLOWTRAN 7 model. Phillips Laboratory, Geophysics Direc-torate, Hanscom AFB, 261 pp.
Koepke, P., 1984: Effective reflectance of oceanic whitecaps. Appl.Opt., 23, 1816–1822.
Kriebel, K. T., 1977: Reflection properties of vegetated surfaces: Ta-bles of measured spectral biconical reflectance factors. MunichUniversity Meteorologisches Institut, Wissenschaftilche, Mittei-lung, 84 pp.
Kummerow, C., W. Barnes, T. Kozu, J. Shiue, and J. Simpson, 1998:The Tropical Rainfall Measuring Mission (TRMM) sensor pack-age. J. Atmos. Oceanic Technol., 15, 809–817.
Li, X., S. A. Christopher, J. Chou, and R. M. Welch, 2000: Estimation
of shortwave direct radiative forcing of biomass-burning aero-sols using new angular models. J. Appl. Meteor., 39, 2278–2291.
Loeb, N. G., F. Parol, J.-C. Buriez, and C. Vanbauce, 2000: Top-of-atmosphere albedo estimation from angular distribution modelsusing scene identification from satellite cloud property retrievals.J. Climate, 13, 1269–1285.
——, K. J. Priestley, D. P. Kratz, E. B. Geier, R. N. Green, B. A.Wielicki, P. O’R. Hinton, and S. K. Nolan, 2001: Determinationof unfiltered radiances from the Clouds and the Earth’s RadiantEnergy System (CERES) instrument. J. Appl. Meteor., 40, 822–835.
——, S. Kato, and B. A. Wielicki, 2002: Defining top-of-atmosphereflux reference level for earth radiation budget studies. J. Climate,15, 3301–3309.
Loveland, T. R., and A. S. Belward, 1997: The International Geos-phere Biosphere Programme Data and Information System Glob-al Land Cover dataset (DISCover). Acta Astronaut., 41, 681–689.
Manalo-Smith, N., and N. G. Loeb, 2001: Longwave and windowangular distribution models from CERES/TRMM radiance mea-surements. Preprints, 11th Conf. on Satellite Meteorology andOceanography, Madison, WI, Amer. Meteor. Soc., 122–125.
McClatchey, R. A., R. W. Fenn, J. E. A. Selby, F. E. Volz, and J. S.Garing, 1972: Optical properties of the atmosphere. Tech. Rep.AFCRL-72-0497, 103 pp.
——, and Coauthors, 1973: AFCRL atmospheric absorption line pa-rameters compilation. Tech. Rep. AFCRL-TR-73-0096, 201 pp.
Minnis, P., and M. M. Khaiyer, 2000: Anisotropy of land surface skintemperature derived from satellite data. J. Appl. Meteor., 39,1117–1129.
——, and Coauthors, 1995: Cloud optical property retrieval (Sub-system 4.3). Clouds and the Earth’s Radiant Energy System (CE-RES) Algorithm Theoretical Basis Document. Vol. 3, CloudAnalyses and Radiance Inversions (Subsystem 4). NASA RP1376, 42 pp.
——, D. P. Garber, D. F. Young, R. F. Arduini, and Y. Tokano, 1998:Parameterizations of reflectance and effective emittance for sat-ellite remote sensing of cloud properties. J. Atmos. Sci., 55,3313–3339.
——, D. F. Young, B. A. Wielicki, P. W. Heck, X. Dong, L. L. Stowe,and R. Welch, 1999: CERES cloud properties derived from mul-tispectral VIRS data. Proc. Symp. on Remote Sensing, Florence,Italy, EOS/SPIE, Vol. 3867, 91–102.
Morel, A., 1988: In-water and remote measurements of ocean color.Bound.-Layer Meteor., 18, 177–201.
Priestley, K. J., R. B. Lee III, R. N. Green, S. Thomas, and R. S.Wilson, 1999: Radiometric performance of the Clouds and theEarth’s Radiant Energy System (CERES) proto-flight model onthe Tropical Rainfall Measuring Mission (TRMM) spacecraft for1998. Preprints, 10th Conf. on Atmospheric Radiation, Madison,WI, Amer. Meteor. Soc., 33–36.
Rabier, F., J.-N. Thepaut, and P. Courtier, 1998: Extended assimilationand forecast experiments with a four-dimensional variational as-similation. Quart. J. Roy. Meteor. Soc., 124, 1861–1887.
Roberts, R. E., J. E. A. Selby, and L. M. Biberman, 1976: Infraredcontinuum absorption by atmospheric water vapor in the 8–12mm window. Appl. Opt., 15, 2085–2090.
Rossow, W. B., and R. A. Schiffer, 1991: ISCCP cloud data products.Bull. Amer. Meteor. Soc., 72, 2–20.
Roujean, J.-L., M. Leroy, and P.-Y. Deschamps, 1992: A bidirectionalreflectance model of the earth’s surface for the correction ofremote sensing data. J. Geophys. Res., 97, 20 455–20 468.
Smith, G. L., 1994: Effects of time response on the point spreadfunction of a scanning radiometer. Appl. Opt., 33, 7031–7037.
Stamnes, K., S.-C. Tsay, W. Wiscombe, and K. Jayaweera, 1988:Numerically stable algorithm for discrete-ordinate-method ra-diative transfer in multiple scattering and emitting layered media.Appl. Opt., 24, 2502–2509.
Stowe, L., R. Hucek, P. Ardanuy, and R. Joyce, 1994: Evaluating thedesign of an earth radiation budget instrument with system sim-

FEBRUARY 2003 265L O E B E T A L .
ulations. Part II: Minimization of instantaneous sampling errorsfor CERES-I. J. Atmos. Oceanic Technol., 11, 1169–1183.
Sun-Mack, S., Y. Chen, T. D. Murray, P. Minnis, and D. F. Young,1999: Visible clear-sky and near-infrared surface albedos derivedfrom VIRS data for CERES. Preprints, 10th Conf. on Atmo-spheric Radiation, Madison, WI, Amer. Meteor. Soc., 422–425.
Suttles, J. T., and Coauthors, 1988: Angular radiation models forearth–atmosphere systems. Vol. I. Shortwave radiation. NASARep. RP-1184, NASA, Washington, DC, 144 pp.
——, R. N. Green, G. L. Smith, B. A. Wielicki, I. J. Walker, V. R.Taylor, and L. L. Stowe, 1989: Angular radiation models forearth–atmosphere systems. Vol. II. Longwave radiation. NASARep. RP-1184, NASA, Washington, DC, 84 pp.
Trepte, Q., Y. Chen, S. Sun-Mack, P. Minnis, D. F. Young, B. A.Baum, and P. W. Heck, 1999: Scene identification for the CEREScloud analysis subsystem. Preprints, 10th Conf. on AtmosphericRadiation, Madison, WI, Amer. Meteor. Soc., 169–172.
Vermote, E., D. Tanre, J. L. Deuze, M. Herman, and J. J. Morcette,1997: Second simulation of the satellite signal in the solar spec-trum: An overview. IEEE Trans. Geosci. Remote Sens., 35, 675–686.
Warren, S. G., 1984: Optical constants of ice from the ultraviolet tothe microwave. Appl. Opt., 23, 1206–1225.
Welch, R. M., S. K. Sengupta, A. K. Goroch, R. Palikonda, N. Ran-garaj, and M. S. Navar, 1992: Polar cloud and surface classifi-cation using AVHRR imagery—an intercomparison of methods.J. Appl. Meteor., 31, 405–420.
Wielicki, B. A., and R. N. Green, 1989: Cloud identification for ERBEradiation flux retrieval. J. Appl. Meteor., 28, 1133–1146.
——, R. D. Cess, M. D. King, D. A. Randall, and E. F. Harrison,1995: Mission to planet Earth: Role of clouds and radiation inclimate. Bull. Amer. Meteor. Soc., 76, 2125–2152.
Wyatt, P. J., V. R. Stull, and G. N. Plass, 1962: Quasi-random modelof band absorption. J. Opt. Soc. Amer., 52, 1209–1217.
Yang, P., K. N. Liou, K. Wyser, and D. Mitchell, 2000: Parameteri-zation of the scattering and absorption properties of individualice crystals. J. Geophys. Res., 105, 4699–4718.
Zhou, Y., K. C. Rutledge, T. P. Charlock, N. G. Loeb, and S. Kato,2001: Atmospheric corrections using MODTRAN for TOA andsurface BRDF characteristics from high resolution spectroradi-ometric/angular measurements from a helicopter platform. Adv.Atmos. Sci., 18, 984–1004.






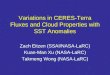

















![Hesiod - Works_and_Days [Loeb]](https://img.pdfslide.us/doc/110x75/577cd3a81a28ab9e789751d9/hesiod-worksanddays-loeb.jpg)


![Aristotle's poetics [loeb]](https://img.pdfslide.us/doc/110x75/579057011a28ab900c9b8c35/aristotles-poetics-loeb.jpg)

