-
7/27/2019 Nano Motor
1/5
1 Nanomotors
In this part of the course we will study nanomotors. First we
will define what we mean by nanomotor. Ananomotor is a machine that
is only nanometres or 10s of nanometres across. By machine I mean
somethingthat either moves in a controlled directed fashion (i.e.,
not randomly), or exerts forces. Here we will mainlybe considering
nanomotors that move things around. These nanomotors are like cars,
they are machines for
transporting things from A to B. But whereas a car is
macroscopic, it is metres long, nanomotors are a billiontimes
smaller. As atoms are typically a few tenths of a nm across,
nanomotors are only tens or hundreds ofatoms across.
Scientists working on nanotechnology are working to make
nanomotors, but so far they have only made verycrude nanomotors.
However, all living organisms rely totally on a large numbers of
nanomotors. Our bodiesare made of cells and each cells contain many
nanomotors, a muscle cell can contain a billion nanomotors.Muscles
can only exert forces because the cells of which they are composed
can exert forces and the cells inturn can only exert forces because
of the billion nanomotors they contain. As these nanomotors are
(protein)molecules, they are also called molecular motors.
Just as cars and trucks are there to transport people and goods
around, say oranges from a Tescos depotto a Tescos superstore, many
molecular motors in our cells are there to transport stuff
(proteins etc) around
a cell. Now, there is an obvious difference between a
macroscopic object, such as an orange, and a moleculein solution.
Oranges just sit there, whereas molecules diffuse around inside
liquids. If a molecule is at theorigin at time t = 0, we have found
that at time t, the square root of the mean of the square of the
distanceof the molecule from the origin is
r2
1/2= (6D)1/2t1/2 diffusion (1)
because the molecule diffuses. Here D is the diffusion constant.
So, an obvious question is: If molecules movevia diffusion anyway,
why do you need molecular motors to move them? The answer is that
diffusion has nodirection, you are as likely to go left as right,
and so if a molecules needs to moved in a specific direction, to
saya specific part of the cell, then diffusion is not adequate.
Also, as we noted with diffusion in the atmosphere,the distance
travelled increases only as the square root of time (as opposed to
being linear in time as it is formotion in a straight line at
constant speed) and so motion over large distances is very slow via
diffusion.
1.1 Molecular motors and the 2nd Law of Thermodynamics
To see how the 2nd Law of Thermodynamics (=the entropy can never
decrease) applies to molecular motors,consider a single motor. The
motors inside cells move along railtracks inside cells, these are
long (micrometreslong or more) thin ( 10 nm) filaments, that
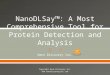
criss-cross the cell. One type of filament, called a microtubule,is
illustrated in Fig. 1. Note that it is made of a regular periodic
array of molecules, it is essentially aone-dimensional crystal.
Let us consider a motor moving in one dimension along one
periodic row of pairs of the molecules, asshown in Fig. 1. The
motor can bind to an array of positions along the row, one every 8
nm for this type
of filament1. If a filament is, for example, 8 m long this means
the motor can bind to it at 1,000 differentpositions.
If we just have a filament and a motor that is not consuming any
fuel then the system will go to thermo-dynamic equilibrium where
the entropy is a maximum (2nd Law). We know that the entropy is a
maximumwhen all possible states, 1,000 of them here, are equally
likely. Then the probability of being at any positionis
p(x) =1
103= 103 (2)
1There are 13 rows in a filament and a motor can move from row
to row quite easily, but for simplicity we neglect this.
Including it just multiplies the numberof positions by 13.
1
-
7/27/2019 Nano Motor
2/5
The entropy S is then
S= 10
3
i=1
pi lnpi = 10
3
x=1
103 ln103 = ln103 = 6.9. (3)
where we label the binding sites from left to right as i = 1, 2,
. . .. Now, molecular motors move in one direction.Let this motion
be to the right. If one of the proteins is attached to a molecular
motor, then it will tend to
move to the right. Ultimately, it will end up as far right as it
can be, i.e., it will be at the rightmost positionfor binding. This
is a single binding site and so the probability of it being there,
p = 1, while the probabilityof it being anywhere else, p = 0.
S= 10
3
i=1
pi lnpi = 1 ln 1 = 0. (4)
The entropy of the protein has, due to the directed motion of
the molecular motor, decreased from 6.9 to0. Of course, the total
entropy must not decrease, and so the molecular motor must do work.
This is justlike a fridge. This pumps heat from a cold environment
(inside the fridge) to a warmer environment (thesurrounding room)
and it cannot just do this as if it did so it would break the 2nd
Law. Thus, all nanomotors
must in addition to moving, generate entropy by producing heat.
To produce this heat they will have to burn
a chemical fuel of some sort. The molecular motors in our body
burn a molecule called ATP, this powers achemical reaction which
allows them to move to one place, hence reducing the entropy due to
the uncertaintyin the position,
In the above example, as the motion changed the entropy due to
the position of the molecule, that ofEq. (4), by 6.9, the motor can
compensate by producing q = 6.9kT 2.8 1020J of heat. This is
forbody temperature, for which kT 4 1021J. This amount of heat
produces S = q/kT = 9.2 of entropy
Figure 1: Schematic showing two types of molecular motor, dynein
and kinesin, and one type of filament,called a microtubule (i.e.,
one type of the railtrack inside cells that motors run along). I
dont expect youto remember the names of these motors and filaments.
However note that the filament is made of rows ofmolecules arranged
in a helical fashion and that each row is made of a repeated (i.e.,
periodic) sequence of pairsof molecules. The two parts of the pair
are coloured in different colours (green and blue, or in B&W
photocopylight and dark grey). The microtubule filament is made of
a helix 13 rows of these pairs of molecules. Theperiod is about 8
nm and so a motor can bind at a whole sequence of positions along a
microtubule that are8 nm apart.
2
-
7/27/2019 Nano Motor
3/5
x
x
u(x)
u(x)
diffusion
M to M*
M* to M
M
M*
l
1)
2)
3)
4)
5)
6)
7)
8)
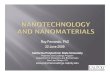
Figure 2: Schematic of the potentials (dashed lines) as a
function of x, u(x), for both states of the molecularmotor: M (top)
and M (bottom). The motor itself is indicated by the black circle.
The dotted lines indicatethe motor going from state M to M or vice
versa, and it either diffusing, in state M, or moving to thebottom
of the potential well, in state M. The progression of the motor
shown is: 1) starts in state M inleftmost potential well, 2) M M,
3) diffuses (by chance to right), 4) MM, 5) moves to the bottom
of
the potential that is second from the left, 6) M
M, 7) diffuses to the left, 8) moves back to the bottomof the
potential that is second from the left.
and so the total entropy is then zero which is as low as it is
possible to go. Any lower and the total entropychange is negative.
In molecular motors this q comes from burning molecules like ATP,
which produces heat.
1.2 A toy model for nanomotors: The Brownian Ratchet
Real molecular motors are complex and poorly understood. It is
difficult to experimentally work out howthey function. Light
microscopy, for example, is useless as the motors are much less
than the wavelength oflight across. However, there is a simple
model that illustrates how motors can exploit diffusion to move in
a
directed way, by burning a fuel. This is the Brownian ratchet,
which goes back to an idea of Feynmans inthe 1960s. It is also
called a diffusive ratchet. The idea is to use a chemical reaction
(molecular motors burnATP as a fuel), that takes the motor from one
state, call it M, to another, call it M, and back in order
torectify diffusion. By rectify I mean allow motion in one
direction, we will take this to be to the right, whilepreventing it
in the other direction, to the left. Our Brownian ratchet only
moves in 1 dimension, which isrealistic as the molecular motors
move up and down filaments inside cell. This rectification is like
a rectifierin an electric circuit, which only allows a current to
flow in 1 direction.
So, the motor is always restricted to move along the x axis (in
practice because it is bound to a filament).However, in state M it
can freely diffuse along the x axis, whereas in state M it feels a
sawtooth potential
3
-
7/27/2019 Nano Motor
4/5
u(x). See Fig. 2 for schematics of the 2 potentials. By freely
diffuse we mean that the potential u(x) the motorfeels in state M
is a constant so there are no forces on it. In state M it has a
diffusion constant D. Also, itis important to note that the
sawtooth potential the molecular motor feels in state M is highly
asymmetric,as you go from left to right the potential gradually
drops, over a distance l, then suddenly increases again. Itis this
asymmetry that is going to rectify the motion of the motor.
We start with the motor in state M and at the bottom of the
potential. The potential well is assumed to
be deep, i.e., deeper than the thermal energy kT. Therefore, in
state M
the molecule quickly heads towardsthe minimum and stays there.
Then, if we start in state M, the sequence of events that occurs
is:
1. A motor in state M stays in that state only for a time , on
average, before converting to state M,i.e., M M. So after a time
the motor is in state M.
2. In state M the potential is flat, so it freely diffuses with
diffusion constant D. Thus, t seconds after itflipped to state M,
it will have diffused a distance of about (Dt)1/2 it is equally
likely to be in eitherdirection.
3. The motor stays in state M for only a short period of time,
on average in stays only for a time . Now,we assume that is so
small that (D)1/2 l, i.e., in the time the motor is in the state M
in which it
can freely diffuse it can only diffuse a distance much less than
the period of the sawtooth potential instate M.
4. After a time the motor returns to state M. It has either
diffused to the left or to the right, each isequally likely, i.e.,
each has a probability of 1/2. If it has diffused to the left it
has only moved a littleway, l, to the left, and so on its return to
the M state it will just slide down to the bottom of thesame well
it was at the beginning: it has not gone backwards. However, if it
has diffused to the right,it will have gone over the top of the
sawtooth potential in the potential and so when it returns to
thestate M it is in the next valley along. It will then slide down
to the next minimum in the potential tothe right, and so will have
moved forward a distance l to the right.
5. The motor is now in state M at the bottom of the potential
well (either the same one as before or the
next one to the right). The motor is now ready to start another
sequence 1) to 4).
After sufficient time has elapsed that the sequence of M to M
and back to M has been repeated manytimes, the net effect is that
during each MMM cycle which takes on average a time + , there isa
50% probability that the motor has moved l to the right and a 50%
probability that the motor has stayedwhere it was. It will not have
moved to the left: the sawtooth potential has rectified the
diffusional motion.As it moves a distance l with 50% probability
every + seconds the average velocity is
average velocity =1
2
l
+ . (5)
Our expression for the velocity is half the period of the
potential, divided by the sums of the times in
each state, and . In cells, the motors run along two types of
filament, one of these types is called amicrotubule. It has a rough
surface with a periodicity of 8nm. Thus we know l, it is of order
10nm, to withinthe approximations we are currently using. Also,
motor speeds have been measured and they are typicallyabout 1000 nm
s1 or a little less. The final fact is that motors burn one
molecule of ATP per 10 nm stepand that burning a single ATP
molecule releases about 1019J of energy.
Let us see whether these observations make sense in terms of our
model. A velocity of 1000 nm s1
implies that 1 10 nm step takes 102s. Thus + cannot be more that
102s. Let us consider these 2 timesseparately, first . This is the
time taken to diffuse over a peak in the potential but not too far
(to avoid it
4
-
7/27/2019 Nano Motor
5/5
going backwards). We expect the peak to be 1 to 2 nm wide, i.e.,
larger than an atom but less than 10 nmof course. The diffusion
constant for a protein is given approximately by the
Stokes-Einstein expression
D =kT
6a(6)
where a is the radius of the protein and is the viscosity of the
inside of a cell. Motors are quite big proteins
so we take a = 10nm. The viscosity of water 103Pa s. However,
cells are full of proteins and othermolecules so to a protein they
feel around 100 times thicker than water, so we take a viscosity =
0.1Pa s,inside a cell. Thus we have a diffusion constant D 1013m2s1
= 105nm2s1.
Also, note that the term on the bottom, 6a is the drag
coefficient, i.e., if a protein molecule is draggedthrough the cell
at a velocity v, the drag on the particle is
drag force = 6av 108v N. (7)
Now, we return to the time the motor takes to diffuse
approximately 1 nm when it is in the freely diffusingstate M. The
distance diffused is approximately (Dt)1/2 (105t)1/2nm for a
protein. This distance equals1nm when t = 105s. We know that on
average 1 step takes about 102s. Therefore, diffusion over the
required short distance is easily fast enough to give us the
velocities measured in experiment.Now, let us consider the other
time, . This is the time it takes to fall down the potential well
in state
M. Going to the bottom of the well involves being pulled a
distance of order l, i.e., 10 nm. This is in thethick viscous
environment of the cell and so it involves doing work against
friction. As we have only burnedone ATP molecule we can do no more
than 1019J of work. The work done is just force times distance,
andwe know the force as a function of the velocity v that we move
to the bottom of the potential well. So, wehave that
work done against friction = force l = 6avl 1016v J. (8)
This increases with v of course, for a v = 1000nm s1, the work
done is 1022J. This is much less than thework that can be done with
a single ATP molecule. So, we have found that our model is
consistent with theexperimental data. When we put experimentally
measured values for the parameters such as protein size,
ATP energy etc., then we found that the maximum velocity within
the model was more than the velocitymeasured in experiment.
If v were 1000 times larger then the drag would be 1000 times
larger, as it increases linearly with v, andso 1019 not 1022J would
be consumed. This would be the limit to how fast the motor could
move. Motorsare not observed to move this fast, however, they are
observed to move cargoes, pulling cargoes along willincrease the
drag. The drag increases with the radius, so if a motor pulls a
cargo about 100 times its size, i.e.,1000 nm, at about 1000 nm s1,
then it burns 1021. This is about 10% of the maximum enegrgy in
ATP.So, then it is working at about 10% efficiency, which is
comparable to the efficiency of an internal combustionengine. (Of
course, as the cargo is so small, its weight is not an issue.)
5