Embed Size (px)
Citation preview

Newton-Like Extremum-Seeking Part I: Theory
William H. Moase, Chris Manzie and Michael J. Brear
Abstract— In practice, the convergence rate and stability ofperturbation based extremum-seeking (ES) schemes can be verysensitive to the curvature of the plant map. This sensitivityarises from the use of a gradient descent adaptation algorithm.Such ES schemes may need to be conservatively tuned inorder to maintain stability over a wide range of operatingconditions, resulting in slower optimisation than could beachieved for a fixed operating condition. This can severelyreduce the effectiveness of perturbation based ES schemes insome applications. It is proposed that by using a Newton-likestep instead of a more typical gradient descent adaptation law,then the behaviour of the ES scheme near an extremum willbe independent of the plant map curvature. In this paper, sucha Newton-like ES scheme is developed and its stability andconvergence properties are explored.
I. INTRODUCTION
Consider a plant with an output, y, which is an unknown
function of an input, �. The goal of extremum-seeking is to
find the input, �∗, which minimises or maximises y using
only measurements of the output. Without loss of generality,
this paper will deal with the problem of minimising y.
Furthermore this paper will deal only with the problem
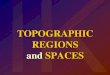
of seeking a local minimum of y. Fig. 1 shows a basic
schematic of sinusoidally perturbed ES. The control input is
the superposition of a ‘slowly’ changing component, �0, and
a ‘small’ dither signal, a sin(!�t). The dither signal is used to
determine y′0, where y′ = dy/d�, ( )0 is a quantity evaluated
at � = �0, and ( ) is an estimate. The exact method for
estimating y′0 varies between different schemes but requires
�0 to be slowly changing compared to the dither signal. With
an estimate of y′0 available, �0 can be driven towards �∗ using
an approximated gradient descent law,
d�0dt
= −!�k�y′0. (1)
Sinusoidally perturbed ES schemes were amongst the first
adaptive controllers developed and were popular in the 1950s
and 1960s [1]. In 2000, there was a resurgence of interest
in ES, largely due to the development of the first stability
analysis of sinusoidally perturbed ES on a general, non-
linear plant in [2]. In the same year, a number of other
papers on sinusoidally perturbed ES were published [3]
including extensions to multi-parameter optimisation [4], [5].
There have been a number of developments in sinusoidally
perturbed ES since 2000 including: extension to discrete
This research was partially supported under Australian Research Coun-cil’s Discovery Projects funding scheme (project number DP0984577).
W. H. Moase, C. Manzie and M. J. Brear are with theDepartment of Mechanical Engineering, The University ofMelbourne, 3010, Victoria, Australia [email protected],[email protected], [email protected]
Gradient
estimator
+∫
Plant
θ
y
a sin(ωθt)
−kθωθ
θ0
y′0
Fig. 1. Basic schematic of sinusoidally perturbed ES.
time [6]; semi-global stability results [7]; the use of periodic
non-sinusoidal dither signals [8]; the use of a time-dependent
dither signal amplitude [9]; and the development of stochas-
tically perturbed ES [10].
As a result of using an approximated gradient descent
adaptation law, the local convergence speed of a perturbation
based ES scheme is typically proportional to y′′∗
, where ( )∗
is a quantity evaluated at � = �∗ and y′′ = d2y/d�2.
This dependence is evident in the mathematical analysis of
particular ES schemes [11], and can severely reduce the
effectiveness of perturbation based ES in applications with
a wide range of plant behaviours [12]. If the operating
condition changes, then an increase in y′′∗
may destabilise
the scheme (since the rate of change of �0 must remain
sufficiently small in order to estimate y′) whereas a decrease
in y′′∗
will result in a reduced rate of convergence.
This curvature dependence may be reduced by introducing
further compensators to the ES scheme [11]. By appropri-
ate selection of these compensators, the behaviour of the
averaged, linearised closed-loop system can be tuned. This
tuning could aim to increase the speed at which the extremum
is tracked or, of more interest here, it could reduce the
sensitivity of the closed-loop system to perturbations in y′′∗
by
using, for example, ℋ∞ techniques. Although this reduced
sensitivity to y′′∗
is an improvement over more simple ES
schemes, this technique requires an a priori estimate of y′′∗
and is most effective for small variations in y′′∗
.
Some schemes are capable of seeking minima in a fashion
which is independent of the curvature at that minimum.
One such scheme is the discrete-time triangular search al-
gorithm [13] which uses information from previous steps
(rather than a dither signal) in order to determine its next
step. The magnitude of each step is not based on any estimate
of the gradient, so the performance of the scheme is not
related to the magnitude of y′′∗
. This is evident in [14],
where triangular search and sinusoidally perturbed ES are
compared in the role of minimising the thermoacoustic limit-
cycle pressure oscillations in a gas-turbine combustor. The
adaptation gain, k�, used in the sinusoidally perturbed ES
Joint 48th IEEE Conference on Decision and Control and28th Chinese Control ConferenceShanghai, P.R. China, December 16-18, 2009
ThAIn1.9
978-1-4244-3872-3/09/$25.00 ©2009 IEEE 3839

scheme had to be changed between operating conditions,
whereas triangular search required no such tuning.
The Kiefer-Wolfowitz (KW) algorithm [15] is a popular
stochastic approximation scheme for online minimisation. It
uses a gradient descent law, �n+1 = �n − kny′n, where ( )ndenotes a value at the n-th step of the algorithm and knis a sequence of positive numbers satisfying certain, well-
known, conditions which include kn → 0 as n → ∞.
The gradient is estimated using a finite difference which
is performed over an interval [�n − an, �n + an] where
an → 0 as t → ∞. There have been a number of extensions
to the KW algorithm which include multi-variable optimi-
sation [16], [17], [18], methods for handling constrained
optimisation problems [19], and a deterministic result for
non-smooth optimisation [20]. Since the KW algorithm, and
its mentioned extensions, use a gradient descent algorithm,
optimal selection of the series kn and an requires knowledge
of y′′ [21]. This problem is largely solved through the use of
a Newton step [22], [23]. In the one-dimensional case, this
involves estimating both y′ and y′′ before progressing �n an
amount proportional to y′/y′′. In a region near the extremum,
the Newton step approximates the difference between the
current input and the optimal input, so in the case of perfect
estimation of y′ and y′′, it has a local rate of convergence
which is independent of y′′∗
.
Newton-like SA and triangular search achieve convergence
independently of y′′∗
, however, they lack one major advantage
offered by perturbation based ES: the ability to achieve
convergence to the extremum on a time-scale comparable
to that of the plant dynamics [1] (instead, they require the
plant dynamics to settle between each step of the algorithm).
This motivates the present work: to develop a sinusoidally
perturbed ES scheme which uses a Newton-like step.
The proposed scheme is described in Section II, and as
well as using a Newton-like step, features a dither signal
amplitude schedule (DSAS). This idea is similar to the
shrinking interval used in the KW algorithm for estimating
the gradient, or the time-varying dither signal amplitude for
ES used in [9]. By initialising a to be large and reducing it
as the extremum is approached, then fast convergence rates
and accurate convergence are simultaneously achievable. The
most significant difference between the proposed DSAS and
the aforementioned schemes is the ability for the DSAS to
increase the dither signal amplitude should �∗ change after
some time. In Section III, it is shown that the proposed
scheme is stable for a noiseless plant with no dynamics and
that arbitrarily accurate convergence to the extremum can be
achieved. For a plant with linear time-invariant (LTI) input
and output dynamics, conditions for local stability of the
ES scheme are given, and it is shown that the local rate of
convergence is independent of y′′∗
.
II. PROPOSED SCHEME
Fig. 2 shows a schematic of the proposed scheme. The
plant is subject to the input
� = �0 + a sin (!�t) , (2)
Gradient
estimator
+∫
Plant
θ
y
×
sin(ωθt)
×
Adaptation
law
DSASa
θ0
ay′0
a2y′′0
Fig. 2. Basic schematic of proposed ES.
where !� > 0. �0 is progressed according to the adaptation
law, and a(t) can be progressed according to the DSAS or
may simply be set to a constant, a = amin, where amin > 0.
Meanwhile, the gradient estimator determines y′0 and y′′0 for
use in the adaptation law.
A. Adaptation law
Let � = �0 − �∗, and consider the Taylor expansions,
y′0
(�)= �y′′
∗+O
(�2), y′′0
(�)= y′′
∗+O
(�). (3)
It then becomes apparent that the local (small �) behaviour of
a regular gradient descent law would yield a rate of change of
� which is proportional to �y′′∗
, whereas a Newton step would
yield a rate of change which is proportional to �. Therefore
the local behaviour of an adaptation law using a Newton step
will be independent of y′′∗
(unlike a regular gradient descent
law). A more practical alternative to a Newton-step is,
d�0dt
=
⎧⎨⎩−k�!� y′0
/y′′0 if
∣∣∣y′0∣∣∣ < �aminy′′0 ,
−k�!��amin sgn(y′0
)otherwise,
(4)
where �, k� > 0 are dimensionless quantities. �0 is pro-
gressed at a rate corresponding to an approximated Newton
step only when �aminy′′0 > ∣y′0∣. Otherwise, �0 is progressed
at a rate corresponding to a sign-of-gradient descent. This
latter behaviour has two purposes. First of all, because
the Newton step seeks �0 satisfying y′0 = 0, then it may
seek a maximum or inflection point instead of a minimum.
However, at a maximum or inflection point, y′′ ≤ 0, so
sign-of-gradient descent behaviour will instead be followed,
giving a more desirable result. The second purpose of the
sign-of-gradient descent behaviour is to saturate the rate of
change of �0 at ±k�!��amin. This avoids singular behaviour
of the Newton step as y′′0 → 0, and also makes it possible
to ensure �0 changes ‘slowly’ compared to the dither signal.
As will become apparent in the next subsection, the latter of
these properties is important for the estimation of y′0 and y′′0 .
B. Gradient estimator
Consider a plant with no dynamics subject to the input �as defined in (2). Taking the Taylor series expansion of yabout � = �0 gives
y = y0 + y′0a sin (!�t) +12y
′′
0a2 sin2 (!�t) + ℎ, (5)
ThAIn1.9
3840

where ℎ is terms of third and higher order in a. Alternatively,
the plant output may be represented in state-space:
y = Cx+ ℎ, (6a)
dx
dt= !�Ax+
∂x
∂�0
d�0dt
+∂x
∂a
da
dt, (6b)
where C =(1 1 0 0 − 1
4
),
x =
⎛⎜⎜⎜⎜⎝
y0 +14a
2y′′0y′0aS1
y′0aC1y′′0a
2S2
y′′0a2C2
⎞⎟⎟⎟⎟⎠
, A =
⎛⎜⎜⎜⎜⎝
0 0 0 0 00 0 1 0 00 −1 0 0 00 0 0 0 20 0 0 −2 0
⎞⎟⎟⎟⎟⎠
,
y(n) = dny/d�n, Sn = sin(n!�t) and Cn = cos(n!�t). This
system can then be estimated with the state-space observer:
y = Cx, (7a)
dx
dt= !�Ax+ !�L (y − y) , (7b)
where L ∈ ℝ5 is a non-dimensional gain vector. Thus y′0
and y′′0 can be estimated from:
ay′0 = C′x, C
′ =(0 S1 C1 0 0
), (7c)
a2y′′0 = C′′x, C
′′ =(0 0 0 S2 C2
). (7d)
Since the observer does not explicitly account for the
variation of a and �0 with time, it is most effective when
a and �0 change slowly compared to the dither signal. Note
that although this state-space observer is based on that used
in [14], it has been extended to be capable of estimating y′′0 .
C. Dither signal amplitude schedule
As discussed in the previous subsection, the ability of the
state-space observer to accurately estimate y′0 and y′′0 relies
on a and �0 varying slowly compared to the dither signal.
In order to increase the maximum allowable rates of change
of a and �0, then one could simply increase !�. However,
the maximum allowable value of !� depends upon plant
noise and dynamics. If faster convergence of �0 to �∗ was
required than could be achieved by simply increasing !�,
then a could be increased. However, even if the ES scheme
was able to achieve perfect convergence of �0 to �∗, then
the superposition of a large dither on the plant input would
result in large fluctuations in y about its minimum. Instead,
it would be ideal to have large a when the rate of change
of �0 is large, and small a when the rate of change of �0is small. The most simple way of achieving such behaviour
would be to let a ∝ ∣d�0/dt∣, however, this is impractical
since:
∙ from (4) and (7c)–(7d), a circular algebraic relationship
arises between a and d�0/dt; and
∙ noise in the measurement of y will prevent the use of
an arbitrarily small dither signal amplitude.
Instead, it is proposed that a be related to d�0/dt by the
differential equation,
da
dt= ka!� (�− a) , (8)
where ka > 0. Therefore at any given instant, (8) attempts
to drive a towards �, which is given by
� = amin + amin�
(1
amin!�k�
d�0dt
), (9)
where � : ℝ → ℝ>0 and �(z) ≤ ∣z∣ for all z and some
≥ 0. The quantities, amin, k� and !�, are defined in (2)
and (4).
Remark 1: If there was no noise on y and �∗ was a
constant, then amin could be made arbitrarily small, however,
amin should be finite in any practical scenario. Generally �should be chosen to be some function which increases with
∣d�0/dt∣ so that a scales, in some sense, with ∣d�0/dt∣.
III. STABILITY RESULTS
A. Plant with no dynamics
Assumption 1: The plant (see Fig. 2) has no dynamics,
and is given by a time-invariant function y : ℝ → ℝ with
y′′∗> 0. Furthermore, there exists a domain D� containing
the origin such that for all � ∈ D�:
∙ y(� + �∗) is twice continuously differentiable with
respect to �; and
∙ sgn(y′(� + �∗)) = sgn(�).Assumption 2: (A− LC) is Hurwitz.
Remark 2: Assumption 2 can be satisfied by appropriate
selection of L.
Theorem 1: Under Assumptions 1 and 2, for any com-
pact set D ⊂ D� × ℝ5 containing the origin, there exist
a∗min > 0, k∗� > 0 and k∗a > 0, such that for all
(amin, k�, ka) ∈ (0, a∗min) × (0, k∗�) × (0, k∗a), the solution
(�(t), a(t)) of system (2), (4), (7a)–(9), with initial condi-
tions (a(0), �(0), x(0)) ∈ [0, �amin]×D satisfies
lim supt→∞
∣∣∣� (t)∣∣∣ = O
(a2miny
(3) (�1) /y′′
∗
), (10a)
lim supt→∞
∣a (t)∣ = O(a2miny
(3) (�1) /y′′
∗
), (10b)
where a = a − amin, x = x − x, and �1 is some
input satisfying ∣�1 − �0∣ ≤ a. Furthermore, if ℝ satisfies
the conditions placed on D� in Assumption 1, then (10a)
and (10b) can be satisfied for arbitrarily large ∣�(0)∣ and
∣x(0)∣.Proof: Consider the non-dimensional parameters,
� =�
amin, a =
a
amin, x =
x
a2miny′′
∗
, t = !�t.
Letting Ax = (A−LC), then system (2), (4), (7a)–(9) can
be expressed in non-dimensional terms as
d�
dt= k�f
(�, a, x, t
), (11a)
da
dt= ka
(�(f(�, a, x, t
))− a
), (11b)
dx
dt= Axx+ Lℎ− 1
aminy′′∗
(∂x
∂�0
d�
dt+
∂x
∂a
da
dt
), (11c)
ThAIn1.9
3841

where ℎ = ℎ/(a2miny′′
∗),
f(�, a, x, t
)=
⎧⎨⎩−y′0
/(aminy′′0
)if
∣∣∣y′0∣∣∣ < amin�y′′0 ,
−� sgn(y′0
)otherwise,
y′0 = y′0 + aminy′′
∗C
′x(1 + a)
−1,
y′′0 = y′′0 + y′′∗C
′′x(1 + a)
−2,
Under Assumption 2 there exists a symmetric, positive
definite matrix, P, which satisfies the Lyapunov equation,
PAx +AT
xP = −I. Let
V =y0 − y∗k�a2miny
′′
∗
+ ( + 1)
∣∣�∣∣
k�+
a
ka+ �
√xTPx, (12)
where � > 0. The domain of interest for this proof is
restricted to (amin, k�, ka, a, �, x) ∈ (0, a∗min) × (0, k∗�) ×(0, k∗a) × [0, �] × D, where D ⊂ D� × ℝ
5 is a compact
set containing the origin and D� = {z/amin : z ∈ D�}. By
Assumption 1, V is a positive definite function of (�, a, x)and is, therefore, a suitable Lyapunov candidate function for
system (2), (4), (7a)–(9). However, it is still necessary to
explore the conditions under which dV/dt < 0. Letting ∥ ⋅ ∥denote the ℒ2 norm,
dV
dt= �ℎ
LTPx√
xTPx+ ��
∣∣�∣∣+ �aa+ �x ∥x∥ , (13)
where
�� =g(f(�, a,0, t
))∣∣�∣∣ + �ka
a ∣y′0∣C′Px
�y′′∗
√xTPx
,
�a = �ka(a+ 1) y′′0
[12 0 0 S2 C2
]Px
y′′∗
√xTPx
− 1,
�x = gx − 12�
√xTx
xTPx,
and
gx =g(f(�, a, x, t
))− g
(f(�, a,0, t
))
∥x∥ ,
g (z) = g1 (z) + g2 (z) ,
g1 (z) =
[y′0
y′′∗amin
+ ( + 1) sgn(�)]
z + � (z) ,
g2 (z) = − �
aminy′′∗
[k�z
∂x
∂�0+ ka� (z)
∂x
∂a
]TPx√xTPx
.
In the next part of this proof, it is demonstrated that
there exists � and sufficiently small k∗� and k∗a such that
�a, ��, �x < 0 over the entire domain of interest. It is quite
obvious that �a < 0 if �ka is sufficiently small, however,
it is not so clear that �� and �x can also be made negative.
First, it is useful to note that sgn(f(�, a,0, t)) = − sgn(�).Using this result and the fact that �(z) ≤ ∣z∣, then
g1(f(�, a,0, t
))∣∣�∣∣ ≤
[ ∣y′0∣y′′∗amin
+ 1
]f(�, a,0, t
)
�< 0.
Therefore �� < 0 if �k� and �ka are sufficiently small. One
can find a sufficiently large � to ensure that �x < 0 so long
as gx is bounded over the domain of interest. This can be
guaranteed if ∂g(f)/∂xn is bounded for n = 1, 2, 3, 4, 5.
Note that ∂g(f)/∂x1 = 0. When y′0 ∕= 0 and ∣y′0∣ ≥ amin�y′′0then ∂g(f)/∂xn = 0 for n = 2, 3, 4, 5. Furthermore, when
∣y′0∣ < amin�y′′0 , it is a relatively simple matter to show∣∣∣∣∣∂f
∂xn
y′′0y′′∗
∣∣∣∣∣ ≤{(1 + a)
−1if n = 2, 3,
�(1 + a)−2
if n = 4, 5.(14)
Because ∣∂f/∂xn∣ is bounded in all of these cases, then it
looks promising that gx will also be bounded. However, there
are two scenarios that require further discussion:
∙ ∂g(f)/∂xn contains a term
N =∂f
∂xn
y′0aminy′′∗
, (15)
which is not obviously bounded as amin → 0. However,
the triangular inequality (∣z1 + z2∣ ≤ ∣z1∣+ ∣z2∣) can be
used to show that
∣y′0∣aminy′′∗
≤ ∣y′0∣aminy′′∗
+∣C′
x∣1 + a
, (16)
and when ∣y′0∣ < amin�y′′0 , then
∣y′0∣aminy′′∗
<�y′′0y′′∗
+∣C′
x∣1 + a
. (17)
It follows that N is, in fact, bounded.
∙ ∣∂f/∂xn∣ is not bounded when y′0 = 0 & y′′0 ≤ 0.
Nonetheless, all of the terms in g(f) are bounded,
most notably, ∣f(�, a, x, t)∣ ≤ �, and from (16),
∣y′0∣/(aminy′′
∗) ≤ ∣C′
x/(1 + a)∣. It follows that gxis still bounded when y′0 = 0 and y′′0 ≤ 0 unless
such a situation can occur for infinitesimal x. This
would require both y′0 = 0 and y′′0 ≤ 0. However, by
Assumption 1, y′0 = 0 if and only if �0 = �∗, in which
case y′′0 > 0.
Therefore gx is bounded, and there exists sufficiently large
� such that �x < 0.
Since ��, �a, �x < 0 over the entire domain of interest, then
dV/dt < 0 unless ∥(�, a, x)∥ = O(ℎ). Taking advantage of
Assumption 1, then there exists an input, �1, such that
ℎ =aminy
(3) (�1) (1 + a)3S3
1
6y′′∗
, (18)
and ∣�1−�0∣ ≤ a. Therefore, ℎ is bounded and can be made
arbitrarily small by decreasing amin. Thus, it is possible to
ensure that dV/dt < 0 except for a small domain containing
the origin. Theorem 1 follows directly after transforming the
system back into dimensional variables.
Corollary 1: Under Assumptions 1 and 2, for any com-
pact set D ⊂ D� × ℝ5 containing the origin, there exist
k∗� > 0 and a∗min > 0, such that for all (amin, k�) ∈(0, a∗min)×(0, k∗�), the solution �(t) of system (2), (4), (7a)–
(7d) with a = amin and initial conditions (�(0), x(0)) ∈ Dsatisfies (10a). Furthermore, if ℝ satisfies the conditions
placed on D� in Assumption 1, then (10a) can be satisfied
for arbitrarily large ∣�(0)∣ and ∣x(0)∣.
ThAIn1.9
3842

Plant
yFo(s)Fi(s)θθi
f( )
Fig. 3. Plant with LTI input and output dynamics.
Remark 3: Theorem 1 demonstrates the stability of the
proposed scheme with DSAS, whereas Corollary 1 demon-
strates the stability of the scheme with a constant dither
signal amplitude a = amin. In both cases, the influence of
the ES scheme on the plant output may be found by taking
the Taylor series expansion of y about � = �∗ to gain
lim supt→∞
∣y(t)− y∗∣ = O(y′′∗a2min
). (19)
B. Plant with LTI input and output dynamics
Up to this point, the analysis of the proposed ES scheme
has considered the plant to be a static input-output map. If
there were (potentially nonlinear) stable dynamics resulting
in a time-invariant steady-state mapping of the input to the
output, then it is expected that the dynamics will have only
a small effect on the behaviour of the scheme provided that
!� is sufficiently small. This choice of !� effectively ensures
time-scale separation between the ES scheme and the plant
dynamics (a similar example of this can be seen in [2]).
However, such a requirement limits the rate of convergence
that can be achieved by the ES scheme. In this subsection,
the local behaviour of the proposed scheme is studied when
time-scale separation between the plant dynamics and the ES
scheme is not guaranteed.
To simplify matters, the influence of DSAS is not in-
vestigated. A slight modification of the proposed scheme is
considered: lags �1 and �2 are introduced in the demodula-
tion signals so that C′ and C
′′ appearing in (7c) and (7d)
respectively are replaced with
C′ =
(0 sin (!�t− �1) cos (!�t− �1) 0 0
),
C′′ =
(0 0 0 sin (2!�t− �2) cos (2!�t− �2)
).
The purpose of these lags, as will become apparent in
Theorem 2, is to compensate for lags (due to the plant
dynamics) between the dither signal and the corresponding
sinusoidal components of the plant output.
Let s denote the Laplace variable and let the use of square
brackets in the context G(s)[f(t)] denote the time-domain
output of the transfer function G(s) when f(t) is its input.
Assumption 3: The plant can be expressed as shown in
Fig. 3, so that �i = Fi(s)[�] and y = Fo(s)[f(�i)], where
Fo(s) and Fi(s) are LTI dynamics.
Assumption 4: There exists a domain D∗ ⊂ ℝ containing
�∗, such that for all z ∈ D∗,
f (z) = f∗ +12f
′′
∗(z − �∗)
2, with f ′′
∗> 0. (20)
Furthermore, the dither amplitude, a > 0, is constant and
sufficiently small to ensure that (�∗ − a, �∗ + a) ⊆ D∗.
Assumption 5: The dynamics Fi(s) and Fo(s) can be
represented in state-space forms so that:
dxi
dt= Aixi +Bi�,
dxo
dt= Aoxo +Bof (�i) ,
�i = Cixi +Di�, y = Coxo +Dof (�i) ,
where Ai and Ao are Hurwitz and Fi(0) = Fo(0) = 1.
Remark 4: Assumption 5 ensurees Fi and Fo have stable
and proper LTI dynamics. The final part of Assumption 5
can be made without loss of generality. If Fi(0) ∕= 1 and/or
Fo(0) ∕= 1, then it is a simple matter to transform
(Fi (s) , Fo (s) , f) →(Fi (s)
Fi (0),Fo (s)
Fo (0), Fi (0)Fo (0) f
).
Theorem 2: Let �i = Fi(s)[�0]−�∗ and x = x−x where
x =
⎛⎜⎜⎜⎜⎜⎜⎜⎝
f∗ +14a
2f ′′
∗∣Fi (i!�)∣2 + 1
2f′′
∗Fo (s)
[�2i
]
af ′′
∗Im
{ei!�tFi (i!�)Fo (s+ i!�)
[�i
]}
af ′′
∗Re
{ei!�tFi (i!�)Fo (s+ i!�)
[�i
]}
a2f ′′
∗Im
{e2i!�tℱ2
}
a2f ′′
∗Re
{e2i!�tℱ2
}
⎞⎟⎟⎟⎟⎟⎟⎟⎠
,
and ℱ2 = F 2i (i!�)Fo(2i!�). Also let xi = xi − x
2πi and
xo = xo − x2πo where x
2πi and x
2πo are 2π/!�-periodic
solutions of
d
dtx2πi = Aix
2πi +Bi (�∗ + a sin (!�t)) ,
d
dtx2πo = Aox
2πo +Bof
(�∗ + Im
{ei!�tFi (i!�)
}).
Finally let
H (s) =1
s+ k�!�J (s)Fi (s), (21a)
J (s) =Re
{Fi (i!�)Fo (s+ i!�) e
i�1
}
∣ℱ2∣ cos (�2 + arg(ℱ2)). (21b)
Under Assumptions 2–5, (�i, x, xi, xo) = 0 is a locally
exponentially stable equilibrium point of the system given
by (2), (4) and (7a)–(7d) provided that:
∙ s = ±i!� are not zeroes of either Fi(s) or Fo(s);∙ s = ±2i!� are not zeroes of Fo(s);∙ cos(�2 + arg(ℱ2)) > 0;
∙ k� is sufficiently small; and
∙ the poles of H(s) all have negative real parts.
Proof: Due to space restrictions, only a sketch of a
proof is provided here. A more complete proof may be found
in [24]. Let �i = �i/a and x = x/(a2f ′′
∗). Equations (7c)
and (7d) can respectively be simplified to,
y′0af ′′
∗
= C′x+Re
{ei�1Fi (i!�)Fo (s+ i!�)
[�i]}
, (22a)
y′′0f ′′
∗
= C′′x+ ∣ℱ2∣ cos (�2 + arg(ℱ2)) . (22b)
If x = 0, then y′′0 = f ′′
∗∣ℱ2∣ cos(�2 + arg(ℱ2)). Therefore,
cos(�2 + arg(ℱ2)) must be positive for the adaptation law
to locally follow a Newton step. Otherwise, the adaptation
ThAIn1.9
3843

law would follow a sign-of-gradient descent and, at best,
�i would chatter about zero. Substituting (7a) into (7b) and
(22a)–(22b) into (4) and linearising each resulting equation
about (�i, x, xi, xo) = 0 respectively yields
d�idt
= −k�FiJ (s)[�i]− k�Fi (s) [C
′x]
∣ℱ2∣ cos (�2 + arg(ℱ2)), (23)
dx
dt= Axx+ L�x (t)− Re
{ΓFo (s+ i!�)
[d�idt
]}(24)
where Γ = (0 −i 1 0 0)TFi(i!�) exp(i!�t) and �x(t)consists of terms that decay to zero independently of �iand xi. Therefore, �x(t) does not affect the local stability
of the ES scheme and is ignored for the remainder of this
analysis. If x = 0 in (23), then the dynamics of �i are given
by H(s), and �i converges to zero if the poles of H(s) all
have negative real parts. Similarly from (24), if �i = 0, then
x converges to zero under Assumption 2. Therefore (23)
and (24) can be thought of as two interconnected systems
which are independently stable. If the interconnections are
sufficiently weak, then the ES scheme will remain stable.
Theorem 9.2 in [25] quantifies the conditions under which
the interconnections can be considered sufficiently weak. In
this case, stability of the ES scheme can be guaranteed if k�is sufficiently small. Theorem 2 follows directly.
Remark 5: The local convergence of �i to zero is inde-
pendent of f ′′
∗since H(s) is independent of f ′′
∗.
Remark 6: Consider the quantity k� where
k�k�
= J (0)Fi (0) =∣ℱ1∣ cos (�1 + arg(ℱ1))
∣ℱ2∣ cos (�2 + arg(ℱ2)),
and ℱ1 = Fi(i!�)Fo(i!�). If Ω� := k�!� is sufficiently
small, then H(s) has a dominant pole at s = −Ω�+O(Ω2�).
This allows the final dot-point of Theorem 2 to be tested
more easily, but effectively restricts the dynamics of �ito be well-separated not only from the gradient estimator
dynamics, but also from the plant dynamics.
Remark 7: When �1 = �2 = 0 and Fi(s) = Fo(s) = 1,
H(s) has a single pole at s = −k�!�. If Ω� is small
(see Remark 6) and non-trivial dynamics are introduced,
that pole is shifted to a location near s = −k�!�. If
k� < 0, then the dynamics will destabilise the system. This
occurs because sgn(y′0) ∕= sgn(y′0) about the equilibrium
point. It follows that the scheme will ‘climb’ the plant map
rather than descend it as intended. If k� < k�, then slower
convergence of �i to zero will be observed than in the
absence of dynamics. If k� > k�, faster convergence will
be observed, however, the region for which the adaptation
law follows a Newton-step will decrease. For fixed !�, the
influence of the pole shift from −k�!� to −k�!� may be
compensated through selection of a different value of k� or
through suitable selection of �1 and �2.
IV. CONCLUSIONS
An ES scheme using a Newton-like adaptation law and
DSAS was developed and shown to achieve convergence of
the control input to a small neighbourhood of the extremum
from a potentially infinite domain of initial conditions. Fur-
thermore, for a plant with LTI input and output dynamics,
conditions for local stability of the ES scheme (without
DSAS) were found and it was shown that local convergence
of the control input is independent of y′′∗
. In part II of this
paper, the behaviour of the proposed ES scheme is further
explored in both numerical and experimental tests.
REFERENCES
[1] K. B. Ariyur and M. Krstic, Real-Time Optimization by Extremum-
Seeking Control. John Wiley & Sons, 2003.[2] M. Krstic and H. Wang, “Stability of extremum seeking feedback for
general nonlinear dynamic systems,” Automatica, vol. 36, pp. 595–601, 2000.
[3] R. N. Banavar, D. F. Chichka, and J. L. Speyer, “Convergence andsynthesis issues in extremum-seeking control,” in Proceedings of the
American Control Conference, 2000, pp. 438–443.[4] M. A. Rotea, “Analysis of multivariable extremum seeking algo-
rithms,” in Proceedings of the American Control Conference, 2000,pp. 433–437.
[5] G. C. Walsh, “On the application of multi-parameter extremum seekingcontrol,” in Proceedings of the American Control Conference, 2000,pp. 411–415.
[6] J.-Y. Choi, M. Krstic, K. Ariyur, and J. S. Lee, “Extremum seekingcontrol for discrete time systems,” IEEE T. Automat. Contr., vol. 47,pp. 318–323, 2002.
[7] Y. Tan, D. Nesic, and I. Mareels, “On non-local stability properties ofextremum seeking control,” Automatica, vol. 42, pp. 889–903, 2006.
[8] D. Nesic, Y. Tan, and I. Mareels, “On the choice of dither in extremumseeking systems: a case study,” in Proceedings of the IEEE Conference
on Decision and Control, 2006, pp. 2789–2794.[9] Y. Tan, D. Nesic, I. Mareels, and A. Astolfi, “On global extremum
seeking in the presence of local extrema,” in Proceedings of the IEEE
Conference on Decision and Control, 2006, pp. 5663–5668.[10] C. Manzie and M. Krstic, “Extremum seeking with stochastic pertur-
bations,” IEEE T. Automat. Contr., vol. 54, pp. 580–585, 2009.[11] M. Krstic, “Performance improvement and limitations in extremum
seeking control,” Syst. Control Lett., vol. 39, pp. 313–326, 2000.[12] A. Banaszuk, K. B. Ariyur, M. Krstic, and C. A. Jacobsen, “An adap-
tive algorithm for control of thermoacoustic instability,” Automatica,vol. 40, pp. 1965–1972, 2004.
[13] Y. Zhang, “Stability and performance tradeoff with discrete timetriangular search minimum seeking,” in Proceedings of the American
Control Conference, 2000, pp. 423–427.[14] A. Banaszuk, Y. Zhang, and C. A. Jacobson, “Adaptive control of
combustion instability using extremum-seeking,” in Proceedings of the
American Control Conference, 2000, pp. 416–422.[15] J. Kiefer and J. Wolfowitz, “Stochastic estimation of a regression
function,” Ann. Math. Stat, vol. 23, pp. 462–466, 1952.[16] J. R. Blum, “Multidimensional stochastic approximation methods,”
Ann. Math. Stat, vol. 25, pp. 737–744, 1954.[17] H. J. Kushner and D. S. Clark, Stochastic approximation methods for
constrained and unconstrained systems. Springer-Verlag, 1978.[18] J. C. Spall, “Multivariate stochastic approximation using a simultane-
ous perturbation gradient,” IEEE T. Automat. Contr., vol. 37, no. 3,pp. 332–341, 1992.
[19] H. J. Kushner, “Stochastic approximation algorithms for constrainedoptmization problems,” Ann. Stat, vol. 2, no. 4, pp. 713–723, 1974.
[20] A. R. Teel, “Lyapunov methods in nonsmooth optimization, part II:persistently exciting finite differences,” in Proceedings of the IEEE
Conference on Decision and Control, 2000, pp. 118–123.[21] S. Yakowitz, P. L’Ecuyer, and F. Vazquez-Abad, “Global stochastic
optmization with low-dispersion point sets,” Oper. Res., vol. 48, no. 6,pp. 939–950, 2000.
[22] V. Fabian, “Stochastic approximation,” in Optimizing Methods in
Statistics. Academic Press, 1971, pp. 439–470.[23] J. C. Spall, “Adaptive stochastic approximation by the simultaneous
perturbation method,” IEEE T. Automat. Contr., vol. 45, no. 10, pp.1839–1853, 2000.
[24] W. H. Moase, C. Manzie, and M. J. Brear, “Newton-like extremum-seeking for the control of thermoacoustic instability,” IEEE T. Au-
tomat. Contr., (In press).[25] H. Khalil, Nonlinear systems, 3rd ed. Prentice Hall, 2002.
ThAIn1.9
3844
![A.media.fbny.org.s3.amazonaws.com/text/2005T/04.24.05.pdf · ik # ^ # IS" 'Sf ^ Ik M 4-?s n m [AA#>!|#^i£-JS-f6ilW4-4^'l ^192t [B^.^:^] $168-^ # ^-r ^ ^ #-t ^ »-ft >^4 4*.w ^ t](https://img.pdfslide.us/doc/110x75/5f4760705be4c144ec5ddc9c/amediafbnyorgs3-ik-is-sf-ik-m-4-s-n-m-aai-js-f6ilw4-4l.jpg)


![≈Ik;Xyps'iht; vıjIvk°yO ' tN]m samhita/kashyapa01sutra.pdf · ≈I" ≈Ik;Xyps'iht; v; vıjIvk°yO ' tN]m (k*m;r.OTym (sU]Sq;nm(ik˘v; l eh…ytVy ' c ik ˘v; l eihtl=,m (aitleihtdoW;"](https://img.pdfslide.us/doc/110x75/5e564adffd4258114a570458/aikxypsiht-vjivkyo-tnm-samhitakashyapa01sutrapdf-ai-aikxypsiht.jpg)