-
TRADE-OFF BETWEEN SNR AND ISI IN MULTI-CHANNEL ZERO
FORCINGEQUALIZERSTimothy F. Settle, Michael D. Zoltowski, and
Venkataramanan Balakrishnan
Purdue UniversityElectrical and Computer Engineering
Department
West Lafayette, [email protected],
[email protected], [email protected]
ABSTRACT past samples (not symbols) from each channel,
encompass-ing a fraction of the mainlobe of the symbol waveform
[3].Multi-channel linear equalizers are commonly employed
inEqualization with sampling L times per symbol with L >
1digital communication systems to mitigate channel distor-will be
referred to as sample-spaced equalization.tions and thereby reduce
inter-symbol interference (ISI).
There are several advantages that accrue from the
factTraditional multi-channel linear equalizer design for lin-that
we have access to multiple channel outputs. For exam-ear
time-invariant channels requires synthesis of equalizingple, it is
well-known that in the case of a single channel, iffilters such
that the frequency response of the overall sys-the channel
frequency response contains a null in the base-tem has unit
magnitude and linear phase. In this work, weband, a linear
equalizer will amplify noise power in theinvestigate the efficacy
of deliberately allowing equaliza-vicinity of the null. This
problem is commonly referred totion errors, i.e., allowing
deviations from unit magnitudeas noise enhancement. However, this
is not true with mul-and linear phase of the overall frequency
response, withtiple channels; here, noise enhancement arises only
whenthe goal of increasing the signal-to-noise ratio (SNR) in
thethe channels have a spectral null at or near the same fre-symbol
decision statistics. Our approach relies on numeri-quency. Another
advantage with multiple channels is thatcal convex optimization
based on linear matrix inequalities.equalization can be achieved
with FIR filters whose lengthOur investigations reveal that as the
allowable equalizationroughly equals that of the channel impulse
responses; inerror is increased, the mean-square error (MSE) of the
post-contrast, exact equalization of a single channel almost
al-equalizer signal constellation decreases despite the
attendantways requires an IIR equalizer.increase in ISI. This
implies that the trade-off between SNR
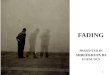
Referring to Figure 1, designing a linear equalizer forand ISI
in the symbol decision statistic weighs more heavilylinear
time-invariant channels requires the equalizing filterin favor of
SNR improvement for a surprisingly large rangecoefficients to
effect a frequency response for the overallof allowable
equalization error.system from s(n) to y(n) which has unit
magnitude and1. INTRODUCTIONlinear phase. We however, propose that
by deliberately per-To our knowledge, in all previous equalizers
proposed formitting equalization errors, i.e., allowing deviations
from
narrowband digital communication systems that use Nyquistunit
magnitude and linear phase of the overall frequency re-pulses, the
decision statistic for a given symbol value is asponse, yields
performance gains under certain conditions.linear combination of
past and future symbol-spaced sam-In particular we seek to improve
the signal-to-noise ratioples. The total number of samples required
depends on (SNR) in the symbol decision statistics beyond that
achievedthe effective duration of the tails of the symbol
waveform.with exact equalization design methods.These samples may
be taken across multiple channels which
We will make use of the bit-error-rate (BER) of the sym-may be
either different antenna outputs or virtual channels bol decisions
as a performance parameter to substantiate ouras synthesized in
fractionally-spaced equalization. We will
claims. We demonstrate that as we increase the allowablerefer to
this type of equalization as symbol-spaced equal-
equalization error, an attendant improvement in the
BERization.of the symbol decisions is achieved. In other words,
byIn many scenarios the multi-path delay spread, , is a permitting
an increase in ISI we are able to achieve a sig-fraction of the
symbol time interval. In some cases, over-nificant decrease in the
power of the additive noise in the
sampling permits one to compute the equalized decisionsymbol
decision statistic, while having negligible impact on
statistic for a given symbol value from a small number ofthe
signal power in the symbol decision statistic.This research work is
supported by the National Science Foundation
under grant no. MIPS-9708309.1
-
2. PROBLEM FORMULATION 2.2. ZERO FORCING EQUALIZATIONFor
sample-spaced zero-forcing equalizers, exact equaliza-2.1. SIGNAL
MODELtion requires the g (n)s to satisfy the equationi
N
c
X
h (n) g (n) = (nD); (2)RFi i K
i=1
where () is the Kronecker delta function. This relation-K
ship implies that only a fixed time delay is imposed on
thetransmitted symbol waveform sequence and therefore ISIis
eliminated given that we are using square-root Nyquistpulses p ()
for the symbol waveform.sr
Due to the fact that we are sampling with L d2(1 +)e, we must
down-sample the outputs of the matched fil-ters by L in order to
permit symbol-spaced processing forsymbol-spaced equalizer design.
Assuming sample-spacedestimates of the channel impulse responses
are available,symbol-spaced (aliased) channels may be constructed
as fol-lows,
h (n) = p (n) h (n) p (n);
i sr RFi
sr
a
h (n) = h (nL):
i
iFigure 1: Multi-Channel communication model.In the above
development, the frequency response of eachConsider the baseband
multi-channel model for a digi-h (n) is band-limited to the
frequency response of p(n) =ital communication system shown in
Figure 1, where each
p (n) p (n), which has a raised cosine spectrum withsr
srof the N channels is realized through a separate antennac
excess bandwidth parameter . The symbol-spaced chan-element at
the receiver. For the model shown in Figure 1,anels, h (n), are the
down-sampled versions of the corre-ithe sampled version of the
transmitted signal is
sponding h (n)s. Exact equalization for a symbol-spacedi
1
X equalizer would then require the g (n)s to satisfy,i
s(n) = b(k)p (n kL): (1)sr
N
c
k=1
X
a
h (n) g (n) = (nD): (3)i K
i
The symbol time interval is designated as T and b(k) isi=1
a sequence of discrete information-bearing symbols. As-sociated
with each information symbol is the transmitted 2.3. SNR OF THE
SYMBOL DECISION STATISTICwaveform p (n) having a square-root raised
cosine spec-sr The SNR of the symbol decision statistic can be
written in
trum with excess bandwidth parameter . The sampling the
following forms for sample-spaced and symbol-spacedinterval is T =
T =L. In equation (1), L is a positive in-s equalization
respectively [2]:
teger which dictates the size of the sampling interval.
Note2that Nyquist sampling would require L d2(1 + )e.Efjb(k) + (m)j
g
; (4)PThe discrete-time channels are modeled as FIR filters
Nc
H
g R g
vv i
i
i=1having impulse responses h (n), i = 1; : : : ; N , each ofRFi
c
2length N [3]. The received signal at each antenna elementh
Efjb(k) + (m)j g
: (5)Pis corrupted by an additive zero-mean white noise
processN
c
H
g g
i
i
i=1
u (n), with u (n) and u (n) being uncorrelated when i6= j.i i
j
In (4) and (5), scales the information symbol and the termThe
output of each antenna is passed through a matched
(m) is the residual ISI. Since b(k) is constant, if we canfilter
having an impulse response p (n). In turn, thesr
constrain 1 and (m) 0 in (4) or (5), then it
followsmatched-filter outputs are passed through a bank of FIRthat
minimizing the denominator of (4) or (5) improves theequalizing
filters having respective impulse responses g (n),i
SNR of the symbol decision statistic.i = 1; : : : ; N , of
length N . These outputs are summedc g
to generate a signal that is sampled at the symbol rate to 2.4.
OPTIMIZATION FRAMEWORKgenerate the symbol decision statistics. In
this section and the sections to follow, we will refer to
two well known metrics from system theory. They are theH norm
and the H norm. The book [1], outlines a1 2
g n1( )
p nsr( )Modulators n( )
u nNc( )
u n2
( )
u n1( ) y n( )
p n*
sr(- )
p n*
sr(- )
p n*
sr(- ) g nNc( )
g n2( )
h nRFNc( )
h nRF2( )
h nRF1( )
x n( )
r n1( )
r n2( )
r nNc( )
Transmitter
Channels
Receiver
-
rigorous definition and treatment of these norms, the reader
with C and D being affine functions of the filter coef-E E
is referred to it for more details. ficients of g (n); : : : ; g
(n).1 N
c
In line with the comments made in Section 1, we will From
standard results in system theory [1, x2.7.3] thedeliberately allow
errors in equalization. To this end, we constraint in Problem (6),
i.e., kE(z)k ", can be shown1
P
N
c
D Hdefine E(z) = z H (z)G (z) as the equal- to be equivalent to
the LMI, in P = P ,RFi i E
E
i=1
ization error transfer function for sample-spaced equalizer2
3
P
H H H
N
c
D a
A P A P A P B C
E E E E Edesign and E(z) = z H (z)G (z) for symbol-E E E
i
i
i=1
H H 2 H
4 5
B P A B P B " I D
0:
E E E Espaced design. We will measure the size of E(z) using
itsE E E
C D I
E E
H norm, i.e., the size of the equalization error will sim-1
(8)ply be the maximum magnitude of the equalization error
We denote the matrix in (8) as Q(P ;C ;D ).E E Efrequency
response. Constraining kEk imposes a bound1
The objective function, f(g ; : : : ; g ), in (6) may be1 N
con jE(!)j uniformly over frequencies. With these
prelimi-rewritten in a form suitable for LMI optimization as
fol-naries, we consider the following optimization problem.Tlows.
Let g = [D j C ] . By introducing a slacki G G
i i
P
N
c
H variable , we can minimize f(g ; : : : ; g ) by requiring1
NMinimize: f(g ; : : : ; g ) = g R gc
1 N vv i
c
i
i=1 (6) f(g ; : : : ; g ) and minimizing . From standard1
NSubject to: kEk ";c
1
results in system theory [1, x10.1.1], the constraint with the
optimization variables being the coefficients of thef(g ; : : : ; g
) can be shown to be equivalent to the LMI,1 N
c
equalizing filter impulse responses.2 3
[D j C ] [D j C ]
G G G GThe above optimization problem will yield a set of
equal-1 1 N N
c c
H
6 7
Dizing filters with the lowest weighted H norm (sample-1
G
2 1
6 7
R 0
H
vv
6 7
Cspaced design) or H norm (symbol-spaced design) for aG
2
1
6 7
0:. . .6 7.given delay D, equalization error bound ", and
equalizer . . . .6 7.. . .
6 7
filter length N . We will study the interaction betweenH
g
4 5
D
G
1
N
c
0 Rthese parameters with the MSE of the post-equalized sig-H
vv
C
G
N
cnal constellation and the BER of the symbol decisions as a
(9)measure of performance. We will denote the matrix in (9) as F(;C
;D ). NoteG G
i i
2.5. LMI FORMULATION that this same matrix can be used for
symbol-spaced designaThe numerical solution of Problem (6) is
through convex by replacingR withR and using the equalization
errorvv
vv
optimization based on linear matrix inequalities (LMIs).
function defined for symbol-spaced equalizer design.LMIs are convex
constraints requiring an affine combina- The matrices F() and Q()
are affine functions of PE
tion of symmetric matrices to be positive-definite. LMI- and the
equalizer filter coefficients. We may now write ourbased
optimization has come to be recognized as a valu- original
multi-channel equalizer optimization problem as aable tool in the
numerical solution of problems from system LMI optimization
problem.and control theory. There are effective and powerful
algo-
Minimize: rithms for the solution of LMI optimization problems,
i.e.,HSubject to: P = PE
Ealgorithms that rapidly compute the global optimum, with
(10)F(;C ;D ) 0
G G
i inon-heuristic stopping criteria. We refer the reader to
theQ(P ;C ;D ) 0:
E E Ebook [1] and the references therein for details.The
transformation of Problem (6) as an LMI optimiza- This problem can
be very efficiently solved using stan-
tion problem requires a suitable state-space description of dard
numerical techniques [1]. In this section we devel-the various
blocks in our communication system. It turns
oped the design equation for a sample-spaced zero-forcingout
that for the FIR filters in our system, the appropriate
equalizer based on LMI optimization. The simulation
re-state-space realization (A;B;C;D), is such thatA is nilpo-
sults in the next section will compare five versions of thetent,
B is a column vector with a one in the first position,
zero-forcing equalizer. These versions are: Sample-Spacedand the
C and D matrices are constructed as follows, Minimum-Norm
(Sas-ZF-MN), Sample-Spaced LMI (SaS-
ZF-LMI, developed in this section), Sample-Spaced Win-C = [h ; :
: : ; h ];
1 N 1
g (7) dowed LMI (SaS-ZF-WLMI), Symbol-Spaced Minimum-D = h ;
0
Norm (SyS-ZF-MN), Symbol-Spaced LMI (SyS-ZF-LMI).Each of the
design methods based on the minimum-normwhere fh ; h ; : : : ; h g
are the impulse response coeffi-0 1 N1
solution yield zero-forcing equalizers which achieve
exactcients. Given state-space realizations for H (z), G (z), andi
i
D equalization, i.e., the equalization error is zero. Whereasz
of the form shown in (7), it is straightforward to write a
the LMI based designs deliberately allow a non-zero
equal-state-space realization for E(z) with (A ;B ;C ;D ),E E E
E
ization error. The reader should consult [2] for details onthe
other design methods not covered in this paper.
-
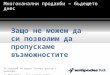
3. SIMULATION RESULTSWe now compare the five different design
methodologieslisted in Section 2.5, using 16-QAM modulation. For
eachsimulation the symbol rate is 40 KHz, L = 5, i.e., T =s
5s, the symbol waveform has the square-root raised
cosinespectrum with = 0:35, the sample-spaced channels aremodeled
as a three tap FIR filters with unity energy gain andthe
symbol-spaced channels are modeled as seven tap FIRfilters. Two
channels are used in all simulations (N = 2).c
For the sample-spaced designs the length of each equalizeris
three and for the symbol-spaced designs each equalizerhas a length
of seven. The design parameter D is chosensuch thatD = ((N +N
1)=2), where () is a functionh g
which rounds its argument to the nearest integer. Our resultsare
summarized in Figures 3, 4, and 5 shown below.
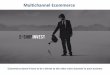
Figure 4: Equalized Spectrums.
a aFigure 2: H , H , H , andH Frequency Responses.RF1 RF2
1 2
Figure 5: BER Curves for 16-QAM Modulation.
[2] T. F. Settle, M. D. Zoltowski, and V. Balakrishnan.Design of
Multi-Channel Equalizers via Linear Ma-trix Inequalites: Trade-Off
Between SNR and ISI. InProc. University of California San Diego
Conferenceon Wireless Communications with IEEE Communica-tions
Society, San Diego, CA., March 1998. Acceptedfor publication.
[3] T. A. Thomas and M. D. Zoltowski. Space-TimeProcessing for
Interference Cancellation and Equaliza-tion in Narrowband Digital
Communications. In Proc.IEEE Vehicular Technology Conference, pages
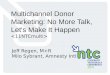
160164, Pheonix, AZ, May 1997.Figure 3: MSE versus ".
4. REFERENCES[1] S. Boyd, L. El Ghaoui, E. Feron, and V.
Balakrish-
nan. Linear Matrix Inequalities in System and ControlTheory,
volume 15 of Studies in Applied Mathematics.SIAM, Philadelphia, PA,
1994.
8 6 4 2 0 2 4 6 8 10x 104
0.5
1
1.5Equalized Spectrum
Frequency in Hz
Mag
nitu
de
SaSZFMN SaSZFLMI SaSZFWLMI
1.5 1 0.5 0 0.5 1 1.5 2x 104
0.8
0.9
1
1.1
1.2
Equalized Spectrum
Frequency in Hz
Mag
nitu
de
SySZFMN SySZFLMI
3 2 1 0 1 2 3x 104
8
6
4
2
0
2HRF1 and HRF2 Frequency Responses
Frequency in Hz
Magn
itude
in dB
HRF1HRF2
2 1.5 1 0.5 0 0.5 1 1.5 2x 104
8
6
4
2
0
2Ha1 and H
a2 Frequency Responses
Frequency in Hz
Magn
itude
in dB
Ha1Ha2
10 15 20 25 30 35108
107
106
105
104
103
102
101
100BER versus SNR, (16QAM)
SNR (dB)
BER
SaSZFMN SaSZFLMI SySZFMN SaSZFWLMISySZFLMI
0 0.05 0.1 0.15 0.2 0.25 0.3 0.3513.5
13
12.5
12
11.5
11
10.5
10
9.5
9MSE versus
e
MSE
(dB)
SaSZFMN SaSZFLMISySZFMN SaSZFWLMISySZFLMI