Embed Size (px)
Citation preview

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 1/11
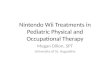
MWC MEGA v1.0
1x Atmega 2560, 256K Flash
9dof + Barometer (ITG 3205 / BMA 180 / HMC5883 / BMP085)8x Motor output
3x Servo output for Camera
8CH PPM Input (incl. 2x AUX CH)
USB Port on board
3 Stats LED
4x Serial ports, supports GPS Function
Serial 1 / GPS Port Serial 2 Serial 3
To RecieverSIGNAL5VGND
GND TX RX +5V GND TX RX +5V
Short to ENABLE
GNDTX RX +5V
Barometer
BMP085
Motor Pins
D10
D9
D8
Micro USB
DT
R TX0
RX
0
5V
NC GND Status LED
Front
Atmega 2560
Acc
BMA180
Gyro
ITG3205
Compass
HMC5883l
D7D6
D5
D3
D2
Carmera
Serial Port
for:
- LCD -Sofware update
USB Status LED Power LED
ISP Port
Reset
5VSDASCLGND3.3VSDASCLGND
Status 2
Mode
D44 Camera Pitch
D45 Camera RollD46 Camera Trigger
- Config 5V I2C 3.3V I2C - Bluetooth
Sensors
#define FFIMUv2
GPS
#define GPS#define GPS_SERIAL Serial1
#define GPS_BAUD 4800 // Your GPS' Baud
Camera stabilization system
#define SERVO_TILT
ESCsCalibration
1.setup all options in config.h to whatever suits your copter
2.activate the define ESC_CALIB_CANNOT_FLY, possibly set high and low values for ESC calibration, if you know what you are doing
3.compile, upload, run --- cannot fly and will use Buzzer/LEDs to indicate finished calibration (after approx 10 seconds)
4.comment the define again, compile, upload5.test carefully with your ESCs calibrated,fly and have fun
If neccessary, the low and high values for the ESCs can be tweaked by changing the values for the defines of
ESC_CALIB_LOW and ESC_CALIB_HIGH 2000

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 2/11
Motor Plan
D2 D6 D5
D2 D5
D6 D5
D3 D6 D3
D3
D7
D2 D5 D6 D5
D2 D5 D8 D7
D8 D7
D6 D3
D6 D3 D3 D2
D8
D7 D7 D5
D3 D5
D3 D8
D10 D8
D10 D6
D2 D6
D2 D9
D9

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 3/11
Stick Configuration
Mode 2
Mode 1
Motor Arm
Motor Disarm
Calibration Acro Gyro
Calib. Stable ACC(disarm Motor first)
Calibration MAG(Rotate Copter on all 3 axes
for 30 seconds)
Trim ACC(move right stick from center
and back for each click - LEDblinks once per click)
Inflight Calibration
Motor Arm
Motor Disarm
Calibration Acro Gyro
Calib. Stable ACC
(disarm Motor first)
Calibration MAG(Rotate Copter on all 3 axes
for 30 seconds)
Trim ACC(move right stick from center
and back for each click - LEDblinks once per click)
Inflight Calibration
Start/Stop Auto-
Telemetry-Mode
LCD - Configuration Mode
Enter
(disarm Motor first)
Select Param
Change Value
Save and Exit
Exit without Save
Start/Stop Auto-Telemetry-Mode
LCD - Configuration Mode
Enter
(disarm Motor first)
Select Param
Change Value
Save and Exit
Exit without Save

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 4/11
Latest version
always at
http://code.google.com/p/multiwii/source/browse/#svn%2Fbranches%2FHa
mburger
This work is licensed under the Creative Commons Attribution-NonCommercial-
ShareAlike 3.0
Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/ or send a
letter to Creative Commons, 171 Second Street, Suite 300, San Francisco, California, 94105, USA.
Version 0.5772156 loqkup Euler-Mascheroni constant . A Product made by Hamburger Document 2012-04-17
MultiWii GPS assited Position Hold and RTH functions
Table of ContentsImplementations ......................................................................................................................... 2
GPS receivers and their configuration ....................................................................................... 2
Configuring and using Multiwii GPS functions .......................................................................... 3
Setting GPS connection for serial GPS ................................................................................... 3
Settings for I2C_GPS............................................................................................................... 3
Magnetic declination ............................................................................................................... 3 Tail
control .............................................................................................................................. 3
Additional GPS settings .............................................................................................................. 4
GPS Filtering ........................................................................................................................... 4 Low
speed D term cancelation ................................................................................................ 4 Waypoint
radius ...................................................................................................................... 4 Minimum
navigational speed.................................................................................................. 4 Maximum
navigational speed ................................................................................................. 4 Slow navigation
....................................................................................................................... 5 Maximum allowed
banking ..................................................................................................... 5 PID
controls............................................................................................................................. 5
Getting ready for flight................................................................................................................ 6
Clearing the EEPROM ............................................................................................................. 6
Compiling the code.................................................................................................................. 6
First test and tuning .................................................................................................................... 6
Pre flight tests.......................................................................................................................... 6 First
test Position Hold.............................................................................................................7 Once
Poshold is ok, then you can try RTH...............................................................................7
Additional information ................................................................................................................7

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 5/11
This is the latest implementation of GPS assisted position hold and Return to home (RTH)
functions for MultiWii. The code that you can get from the link below is based on the
MultiWii_dev_20120504 version changes after that interim release are not applied. I hope that
eventually this implementation will incorporated into the main trunk and could be part of the
2.1 release. The navigational routines are based on the works of Jason Short and the Arducopter team.
Link : http://code.google.com/p/i2c-gps-nav/downloads/list
Implementations
At the moment, there are two ways to add a GPS to your MultiWii
1. If you have a spare serial port AND an AtMega1280 or 2560 microcontroller based FC,
you can connect your GPS to that port and enable the serial GPS code in the code (see
howto below) Due the elevated resource usage (RAM and ROM) this method is not
recommended with AtMega328 based boards
2. You can use an I2C_GPS board, which contains a secondary AtMega328 processor with a
serial GPS and runs the GPS parsing and navigational computations. This board
communicates with the FC via the I2C bus.
GPS receivers and their configuration
For a reliable PosHold and RTH you need a precise and fast GPS receiver. I regret to say, but
older SiRF III receivers with 1Hz update rate are not suitable. You need an MTK, Ublox or
SiRFIV based receiver with at least 5Hz update rate and 115200bps serial speed. The best one
has 10Hz refresh rate and a larger patch antenna. The most commonly used receiver is the
GTop PA6B module with MTK 3329 chipset . This receiver also used on the currently available I2C
nav modules. (Navigatron, RushDuino).
The GPS implementation in MultiWii (both I2c and serial) expect that your GPS receiver is
set to 10Hz (or 5Hz) update rate
communicates at 115200 baud speed
and output GGA, GSA and RMC frames
If these settings are not the default ones, you have to add commands to the initialization part of
the MultiWii and i2cgps code to change settings of your GPS receiver . Future versions of the
code may use autodetect and autoconfig for different GPS modules, but currently it's up to you.
The best solution is to configure your GPS receiver's default settings to match with the above
requirements.
The PA6B receivers firmware could be updated to have these default settings. See the MTK-firmware-tools.rar in the download sections. You can follow the description in the
MediaTek_programming.pdf file, but use the MTK3329_A1.5E_20110118_10Hz_115200.bin
firmware file instead the AX1.30. one. If you have a i2c-gps board (such as Navigatron) you have to upload
some sketch which does not use the serial port. The easiest one is the BLINK
example from the Arduino IDE, Select File->Examples->Basics->Blink. Once you uploaded the

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 6/11
sketch connect your usb/serial dongle to the board (cross connect TX/RX) and follow the update
procedure above . (Latest Navigatron modules reported to preset to 115200/10Hz)
Once you have a new firmware, you can use the MiniGPS program from the update package to
test your module, and you can set default parameters (Just press Shift+ctrl+S to display
additional tabs). Make sure that your GPS receivers default settings are match with the expected
settings above.
Configuring and using Multiwii GPS functions
Setting GPS connection for serial GPS
#define GPS_SERIAL 2
#define GPS_BAUD 115200
//#define I2C_GPS
Settings for I2C_GPS
//#define GPS_SERIAL 2
//#define GPS_BAUD 115200
#define I2C_GPS
Magnetic declination
// Sets the serial port used for GPS
// Sets the serial port speed
//Comment out I2C_GPS since using Serial GPS
// Comment out serial gps
// Comment out serial gps speed
// Enable I2C-GPS
Magnetic declination is the angle between magnetic north (the direction the north end of a
compass needle points) and true north. For a precise navigation we have to know this variance
and use it during our calculations. You can get your location's magnetic declination from this
website : http://magnetic-declination.com/ The value must be converted to a decimal degree by
the degree+minutes*(1/60) formula. For example the magnetic declination for Budapest is 3°58' EAST so the value that you have to enter into config.h is 3+58*(1/60) which is 3.96. EAST
means that the value is positive, WEST means it's negative ( at Pittsburg it is 9° 13' WEST which
is -9.21 ). Enter the calculated value to config.h, in the #define MAG_DECLINIATION line, please
add an f after the number to indicate a decimal number.
#define MAG_DECLINIATION 3.96f
Tail control
There are three settings that control the copter's heading during RTH. DO NOT COMMENT
OUT THESE DEFINES just change the value true/false.
#define NAV_CONTROLS_HEADING true
If this is true then during RTH the copter will always turns its head towards the home point. The heading
control is governed by the MAG P value, lower P means the copter will turn slow, higher
P equals quick turn. MAGHOLD must be active for this function. (and for all heading control
functions)
#define NAV_TAIL_FIRST false

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 7/11
If this is true and NAV_CONTROLS_HEADING is true too, then the copter will turn its TAIL
toward the home point during RTH.
#define NAV_SET_TAKEOFF_HEADING true
If this is true, then the copter, once it arrived to home point, will turn its head to the same
direction where it was pointed at arming,
Additional GPS settings
GPS Filtering
Since GPS positioning is not 100% precise, there is always a small random error in the
coordinates that are given by the GPS receiver. This "noise" can make PosHold twitchy. To
overcome this twitch and sudden attitude changes caused by GPS inaccuracy, there is a 5
element moving average filter. Which filters the coordinates that are given by the GPS receiver. Use it
only if you have a 10Hz update rate.
To enable GPS filtering, set the #define GPS_FILTERING true
Low speed D term cancelation
During position hold, the control loop's D term can induce errors when copter is moving slowly.
To cancel D term when speed is below .5m/s set the #define GPS_LOW_SPEED_F_FILTER
true.
Waypoint radius
If the distance between the copter and the active waypoint is less than this value, then the
waypoint (home point) is considered reached.
You can set the waypoint radius at #define GPS_WP_RADIUS, the value is in cm.
The following four defines are currently (r33) is in the MultiWii.ino. They will be moved to
config.h in the upcoming releases.
Minimum navigational speed
You can set the minimum speed what is used while navigating. This will be the target speed
when copter is arrives to the waypoint (home point). The value is in cm/sec
#define NAV_SPEED_MIN 100
Maximum navigational speedYou can set the maximum speed for navigation. The value is in cm/sec. I recommend to lower it to
200cm/sec first, then increase it later.
#define NAV_SPEED_MAX 400

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 8/11
Slow navigation
When the slow navigation is set, then It allows the copter to reduce its speed to zero when
approaching the next waypoint.
#define NAV_SLOW_NAV true
Maximum allowed banking
This parameter limits the banking output from the navigation routines. By default the maximum
banking that can be induced by the navigation routines is 30deg (1deg = 100). For testing, or
developing you can decrease it to avoid runaways.
#define NAV_BANK_MAX 3000
PID controls
As many other flight characteristics, the Position hold and the RTH is controlled by PID control loops.
Positi on Hold
The location error is calculated in centimeters for X (Longitude) and Y(Latitude) which is fed to a PI
controller. The first stage of the controller takes the XY position error and decides how fast the copter
should go to reach the correct location.
PI Controler - Poshold
Parameter: POSHOL_P is by default .4 or 30 cm/s for a 1m error. The desired rate maxes out at
150cm/s. This doesn't limit the pitch of the copter, The rate controller will do what it takes to
maintain this speed as it approaches the location.
Parameter: POSHOLD_I is used to overcome wind that may be pushing us away from our
target. The higher the number the faster the copter will compensate. If your number is too high it will
cause oscillations and overshoot.
PID Poshold Rate Control¶
Now that we have a desired rate, we need to change the copter pitch and roll to give us that rate
of travel.
Parameter: POSHOLD_RATE_P are the proportional response. Your copter's optimal setting
will depend on the weight and thrust of your engines. If your copter overshoots the target, lower this
value.
Parameter: POSHOLD_RATE_I is set to 0 by default. Use this value to maintain tight control of
the speed of the copter. If the copter is not achieving the speed it needs, this term will make up the
difference by tilting the copter more or less.
Parameter: POSHOLD_RATE_D is the dampening part. If the value is too high you will see
small oscillations in pitch or roll. Once the POSHOLD_RATE_P value is dialed in, start at 0, and
increment slowly. You should see oscillations die down.

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 9/11
RTH and Navigation
The navigation (RTH) has only one PID control, the desired speed is directly calculated from the
distance to the target and the defined speed constrains. The NAV_P, NAV_I and NAV_D
parameters have the same functions as the POSHOLD_RATE.
Getting ready for flight
Clearing the EEPROM
It's not a necessary step, but some people ran into weird problems after uploading the code. The
root cause of these problems was a corrupted EEPROM content. To avoid such a problem, it's
recommended to erase the EEPROM content before upload the new code at the first time.
Start your Arduino IDE, Select File->Examples->EEPROM->eeprom_clear
Upload the sketch and wait. When the status led is on, it's finished. Now you can compile and upload
the new code.
Compiling the code
There are some extra steps are needed to get the code compiled in the arduino IDE. The GPS
functions are using two libraries for PI and PID controllers. These libraries are in the Arduino- PID-
libs folder and you have to copy them into the libraries folder in your arduino folder. If you planning
to use i2c_gps, then an extra step is needed. The i2c communication library that comes with arduino
needs a patch. You have to take twi.c and twi.h from the Arduino-twi-lib-patch and copy them to the
libraries\wire\utilities folder.
First test and tuning
Pre flight tests
Before testing any GPS functions make sure that your copter perfectly working in level mode
and your mag is precise. Mag should not be influenced by motor power wires. If necessary try to move
your mag away from the power wires. Always make a ground test with a new copter, tie it
down, open throttle and check MAG graph in GUI, it should not change when you increase
throttle.
During the initial GPS flights I recommend to use HEADFREE mode, in case you lost
orientation, or something goes wrong. (Thanks to HEADFREE mode, during the development I
was able to bring home my tri, which continuously rotated.)
For GPS functions, you will also need a good GPS reception, and a solid GPS lock. Your GPSreceiver must see at least 5 satellites for acceptable precision. There are two visual indicators that
show that your GPS acquired lock.
If copter is disarmed, when a solid lock is achieved, the Flight Controller's status led will start blink.

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 10/11
If you use i2c-gps, you can watch the status led on the i2c-board. (this is the blue led on
Navigatron).
* 3 short flash at startup
* blinks once per second if GPS is sending data but no position lock yet * blinks twice fast,
then off for a second if GPS 2D position is available
* blinks 3 times fast, then off for a second if GPS 3D position is available
* or goes on for a second, off for a second, (long pulse) if not getting any NEMA sentences forover 5 seconds
In the GUI the gray donut around the heading indicator should blink when GPS (either serial os i2c) is communicating
with the Flight Controller.
In GUI poshold and rth box should change color when copter is armed and a solid gps lock is achieved
(numSat>=5).
First test Position Hold
Once a solid GPS lock is achieved, home position is set when copter is armed. So plug your
battery, wait for GPS lock and fly to your home position (I recommend at least 5/10 meters awayfrom you) land, disarm and arm again. This sets the home position. Copter must be well trimmed and in level
mode.
Now takeoff, and try PosHold. It works best if there is minimal horizontal speed when
activating. If copter is moving when you activating PosHold, you will experience a couple of
swings before it settles. You can try increasing poshold_rate D only by 0.001-0.002 at a time. If hold is not good
enough you can increase P terms, also by 0.01-0.02 at a time. If copter swings or circles then decrease it, or increase
D.
Once Poshold is ok , then you can try RTH.
Fly away some distance from your home location, and first activate poshold, let the copter settle for a couple ofseconds, and then activate RTH. With the default tail control settings your copter
should turn towards the home point and start approaching. Once it's arrived it will switch to a
poshold and rotate it's head to the same direction as it was when armed. Please note, tail control works only when
magHold is enabled.
Additional information
There is an excellent PID tuning simulator (http://diydrones.com/profiles/blogs/ac2-loiter-
tuner-sim), which can help to understand the role of the POSHOLD and POSHOLD_RATE
settings It's made by Jason Short from DIYDrones who is the genius behind Arducopter loitercode. The simulator is using the same algorithm that the current code use. You cannot take values from the
simulator and enter them into your MultiWii, but you can experiment with different settings, and learn what value
does what.

7/23/2019 Multi Wii Pro Manual
http://slidepdf.com/reader/full/multi-wii-pro-manual 11/11
NOTE FOR Multiwii_PRO GPS MODULE ENABLE
MultiWii (http://www.multiwii.com) is an open source multirotor heli software by
Alexandre Dubus.
Download the Latest version of Multiwii.(V2.1)
http://code.google.com/p/multiwii/downloads/list
Download Arduino IDEhttp://arduino.cc/en/Main/Software
Open it with Arduino and the needed settings in the file config.h
FOR ENABLE THE GPS MODULE PLEASE DELETE '//' BEFORE THE PROGRAM
STATEMENT
/**********************************************************************/
/*********************** GPS **************************/
/**********************************************************************/
/* GPS using a SERIAL port
only available on MEGA boards (this might be possible on 328 based boards in the future)
if enabled, define here the Arduino Serial port number and the UART speed
note: only the RX PIN is used, the GPS is not configured by multiwii
the GPS must be configured to output GGA and RMC NMEA sentences (which is generally the
default conf for most GPS devices)
at least 5Hz update rate. uncomment the first line to select the GPS serial port of the arduino */
//#define GPS_SERIAL 2 // should be 2 for flyduino v2. It's the serial port number on arduino
MEGA
//#define GPS_BAUD 115200