-
8/13/2019 Multi-Object
1/5
Received 29 September 2007; accepted 09 December 2007
Project 50574091 supported by the National Natural Science
Foundation of China
Corresponding author. Tel: +86-516-82841479; E-mail address:
[email protected]
Multi-object optimization design for differential and
gradingtoothed roll crusher using a genetic algorithm
ZHAO La-la, WANG Zhong-bin, ZANG FengSchool of Mechanical and
Electrical Engineering, China University of Mining and
Technology,Xuzhou,Jiangsu 221008,China
Abstract: Our differential and grading toothed roll crusher
blends the advantages of a toothed roll crusher and a jaw crusher
andpossesses characteristics of great crushing, high breaking
efficiency, multi-sieving and has, for the moment, made up for the
short-comings of the toothed roll crusher. The moving jaw of the
crusher is a crank-rocker mechanism. For optimizing the dynamic
per-formance and improving the cracking capability of the crusher,
a mathematical model was established to optimize the
transmissionangle and to minimize the travel characteristic value m
of the moving jaw. Genetic algorithm is used to optimize the
crushercrank-rocker mechanism for multi-object design and an
optimum result is obtained. According to the implementation, it is
shownthat the performance of the crusher and the cracking
capability of the moving jaw have been improved.Key
words:differential and grading toothed roll crusher; crank-rocker
mechanism; genetic algorithm; multi-object optimization
1 Introduction
Material crushing is an indispensable process forproduction in
many industries (e.g. mining, metal-
lurgy, chemical industry). Traditional crushers (e.g.,jaw
crusher, impact hammer crusher, rotary crusherand hammer mill)
mainly depend on the workingparts that put the impact pressure on
the materiel tobe crushed in order to implement crushing.
Crushersare of unwieldiness, low efficiency and high
energyconsumption. These disadvantages have greatly re-stricted
efforts to improve their crushing capability.The traditional
crushers we already have cannot meetthe current needs of
production. In recent years, anumber of British MMD toothed roll
crushers havebeen used. But from casual investigation, we find
some shortcomings in these toothed roll crushers: 1)Material
crushing is realized by meshing teeth. Allthe raw minerals to be
crushed are sent into a crush-ing chamber and discharged by force
through themeshing teeth including those up to the standard
ofparticulates. The crushers, failing to accomplish realgrading
crushing, using up a lot of energy, are ineffi-cient and the
crushing teeth quickly show damagefrom metal fatigue. 2) The
phenomenon of jam oc-curs under two conditions. One is a high flow
inwhich large chunks of coal are mixed with smallpieces. The other
one is high humidity in which teethbecome clogged with wet coal.
Because the toothed
roll crusher has no effective grading mechanism, theresult is
unsatisfactory and we cannot depend solelyon the overworked meshing
teeth. According to in-vestigations in a number of coal mines using
MMD
toothed roll crushers, we found that none of themcould even
reach the nominal amount of crushed ma-terial. 3) The crushing
capability of MMD crushers isimproved by increasing the power and
strength oftransmission parts, resulting in high power consump-tion
and costs. Based on these considerations, com-bined with the demand
of the China Shenhua EnergyCo., Ltd. and the Shendong Coal Branch,
our researchteam designed a new, highly efficient differential
andgrading toothed roll crusher to make up the lacksfrom
traditional crushers[1].
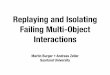
As Fig. 1 shows, the crusher breaking part is com-
posed of differential teeth and a crank-rocker mecha-nism. A
sketch of the moving jaw crank-rockermechanism is shown in Fig. 2.
In a search for opti-mization designs of a crank-rocker mechanism,
itseems that much of the literature consulted aims onlyat
optimizing the transmission angle . For example,Li, et al just
opted for minimizing the travel charac-teristic value of the moving
jaw m of the jawcrusher[23]. But in a practical and typical
crushingprocess, the capability of the moving jaw is closelyrelated
to both the transmission angle and the travelcharacteristic value
of the moving jaw. We have useda GA (genetic algorithm) in order to
optimize the
J China Univ Mining & Technol 18 (2008) 03160320
JOURNAL OF CHINA UNIVERSITY OF
MINING &
TECHNOLOGY
www.elsevier.com/locate/jcumt
-
8/13/2019 Multi-Object
2/5
ZHAO La-la et al Multi-object optimization design for
differential and grading toothed roll 317
crank-rocker mechanism of the differential and grad-ing toothed
roll crusher for the purpose of optimizingthe transmission angle
and minimizing the travelcharacteristic value of the moving jaw
m.
1.Motor assembly of sieving mechanism; 2.Roller screen axis;
3.Drivinggears; 4.Breaking teeth; 5. Moving jaw; 6.Adjustment
mechanism; 7.Frame;
8. Motor assembly of crankshaft; 9.Motor assembly of toothed
roll axis
Fig. 1 General structure drawing of differentialand grading
toothed roll crusher
Fig. 2 Breaking mechanism sketch of differentialand grading
toothed roll crusher
2 Kinetic analysis of the crank-rocker
mechanism
The performance of a hinged four-bar mechanismdepends on the
relative length of its bars. If we set thelength of the rocker c
equal to 1, then the relativelengths of the crank, the connecting
rod and the bodyframe are a, band d. The mathematical model of
thedesign of the crank-rocker mechanism is independentof the actual
length, which makes it more universal[4].
2.1 Optimal transmission angle
The transmission force of the crank-rocker mecha-nism depends
mainly on the transmission angle . Thebigger the transmission
angle, the better the transmis-sion force property it has. The
transmission anglechanges during the process of transmission.
The
choice of a suitable size for each component can op-timize the
minimum transmission angle. Therefore, itis necessary to increase
the transmission angle in or-der to improve the transmission force
and crushing
efficiency.Two possible positions where the minimal trans-
mission angle minmay appear are shown in Fig. 3:
min 1 2min( , 180 ) = (1)
where
)}2/(])(arccos{[ 2221 bcadcb += (2)
)}2/(])(arccos{[ 2222 bcadcb ++= (3)
Fig. 3 Collinear crank and body frame
2.2 Travel characteristic value mof moving jaw
The travel of the moving jaw is divided into ahorizontal part
sand a vertical part h. The function ofthe horizontal travel is to
crush material, but that ofthe vertical travel can not help
crushing but also canintensify the abrasion of the jaw. Diminishing
thevalue of m can both reduce the energy consumptionand the
abrasion and simultaneously, it can improveproductivity and
increase the crushing ratio[2]. Somesteps should be taken to
decrease the value of m.
In order to simplify the calculation, point C istaken out for
analysis. The geometric relationshipsshown in Fig. 4 are:
Fig. 4 Collinear crank and connecting rod
2 2( ) 2( ) cosd b a c b a c = + (4)
-
8/13/2019 Multi-Object
3/5
Journal of China University of Mining & Technology Vol.18
No.2318
1
sinarcsin( )
cC AD
d
= (5)
2 2 2
2
( )arccos
2( )
a b d cC AD
a b d
+ + =
+ (6)
2 1( )sin ( )sin( )s b a a b C AD C AD = + +
(7)
2 1( ) cos( ) ( )cosh a b C AD C AD b a = + +
(8)So, the travel characteristic value distance of point
Cis:m=h/s; the angle of the toggle plate is: =+90; the swing
angle of the toggle plate is:
22arcsin( 1 2 )s m c = +
where is the dip angle of the connecting rod whosemagnitude
depends on the mechanism and thestrength of the moving jaw[3]. Its
value ranges usuallybetween 15 to 20. s is the horizontal travel
and hthe vertical travel.
3 Mathematical model of differential and
grading toothed roll crusher moving jaw
Depending on the kinetic analysis above, both thetransmission
angle and the travel characteristicvalue of point C can be
expressed by the relativelength of the crank, the connecting rod
and the bodyframe of the crank-rocker mechanism. The
designvariables are:
T T1 2 3[ , , ] [ , , ]x x x a b d= =X
The objective function for maximizing the minimaltransmission
angle of the moving jaw is:
1 1 2( ) min( , 180 ) maxf x =
The objective function for minimizing the travel
characteristic valuemof the moving jaw is:
max1
)(2 ==h
s
mxf
The following constraints apply:1) Boundary constraint
conditions of design vari-ables:
max max ( 1, 2, 3)i i ia x b i =
where aimaxand bimaxare the upper and lower limitsof design
variables.
2) Conditions for the crank-rocker mechanism topossess a
crank:
ba , 1a , da , dba ++ 1 ,dba ++ 1 , 1++ bda
3) Constraints of the transmission angle: Increasingthe
transmission angle can improve the transmission
efficiency and augment the horizontal travel. But toolarge a
transmission angle has the reverse effect onthe stress of the
moving jaw and the principal axis[3].
A common condition is that:oo 5545
4) Constraints of the travel characteristic value:according to
experience, the range of m usually isbetween 1.5 and 2.5.
5) Travel of moving jaw: the horizontal travel shasan obvious
effect on productivity. If s is too small itwould reduce the
productivity, but in contrast, it willintensify the crushing force
and lead to damage byoverloading the equipment[5]. The constraint
of thehorizontal travel then becomes:
min(0.3 0.4)s d
where dmin is the minimum dimension of the dis-charge port.
6) Angle constraints of the toggle plate. Usually,the range of
is 18 to 23.
In summary, the optimization problem of thecrank-rocker
mechanism can be boiled down to thefollowing double programming
objective:
T1 2max ( ) ( ( ), ( ))f x f x f x
=X R
(9)
where T1{ | ( ) ( ( ), ..., ( )) 0}n
mx E g x g x g x= = R .
The traditional solutions of multiple objective op-timization
problems achieve low efficiency and caneasily lead to an apparent
local optimum. But thesearching method of GA is iteration in which
the pos-sibility of running into a local, optimal solution
isreduced and the process of solution is accelerated bythe method
of disposing of many individuals syn-chronously in the population.
By using probabletransmission rules to guide searching direction,
GAhas no special requirement about searching space
(e.g.connectedness, convexity, etc.) and does not need
anyadditional information. We have applied GA to opti-mize the
crank-rocker mechanism of the differentialand grading toothed roll
crusher as a multi-objectdesign.
4 Genetic algorithm
Genetic algorithm is a randomized searchingmethod, which
imitates natural, evolutionary laws.GA was, for the first time,
presented by Holland in1975 with the following main features: it
operates onthe structured object directly, without any
restrictionin functional derivation and continuity; it possessesan
implicit parallelism and improved capability ofglobal optimization;
by using a stochastic optimizingmethod, it can automatically obtain
and guide thesearching space for optimization and it can also
adjustthe search direction adaptively without specificrules[67]. GA
has, of late, been an important technol-ogy in intelligent
computing. The main approaches of
GA are: 1) Encoding: before searching in the data ofthe solution
space, GA expresses the data as a geno-typic string structure and
various combinations can
-
8/13/2019 Multi-Object
4/5
ZHAO La-la et al Multi-object optimization design for
differential and grading toothed roll 319
obtain different points. 2) Creating an initialized ge-nus
group: GA randomly generates N initializedstring data, in which
each datum is called an individ-ual and these individuals form a
genus group. GAstarts the iteration by using the string data as an
initial
point. 3) Estimating individual adaptability: the valueof the
adaptability function indicates the quality of anindividual or the
solution. For different problems, thedefinition of an adaptability
function is different. 4)Selection: the purpose of selection is to
choose ex-cellent individuals among present genus group andpermit
them the chance to propagate offspring asparents. Selection is the
embodiment of this thoughtfor GA. The principle of the selection is
that indi-viduals with high adaptability will have a
largerprobability to contribute one or more offspring. 5)Crossover:
this is the most important operation forGA. Crossover operation can
generate new genera-tions that possess the characteristics of the
previousgeneration. It embodies the thought of informationexchange.
6) Mutation: at first, GA selects randomlyan individual from the
genus group. It then changesthe value of one datum from the string
data with agiven probability for the selected individual. Similarto
the biological universe, the probability of mutationfor GA is also
very low; usually its value ranges from0.001 to 0.01, i.e.,
mutation provides an opportunityto generate new individuals.
5 Multi-object optimization based on ge-
netic algorithm
We took the crank-rocker mechanism of the dif-ferential and
grading toothed roll crusher with acrushing capacity of 4000 t/h as
our optimizing object.In order to decide the length of the crank,
the con-necting rod and the body frame of the crank-rockermechanism
when the objective function (9) obtainsits maximum value, under the
condition that the valueof the travel speed ratio coefficient is
1.25, the con-necting rod is 300 mm and the dip angle of the
con-necting rod 18.
We used GA to solve this problem by setting thegenus group scale
equal to 50, the crossover probabil-ity at 0.8, the mutation
probability at 0.005 and thenumber of generations in the evolution
at 1000.
The traditional binary coding method is compara-tively
convenient when used in a theoretical analysis.But for
multidimensional and high precision numeri-cal problems, it tends
to low efficiency and inaccu-racy[8]. We used a natural number
coding method toset the three variables a, b and d as genes,
whichcombine orderly into a chromosome[9]. For example,
p and q are two in-
dividuals.During initialization, GA will generate a genus
group in which 50 individuals are produced on thebasis of a
variable range. We chose Eq.(9) as total
objective function whose value denotes individualadaptability.
We took individualspand qas examplesto be substituted in Eq.(9),
i.e., f(p)=0.8145,
f(q)=0.7887, f(p)>f(q). This indicates that the indi-vidual
adaptability ofp is better than that of q.
A roulette method is used in the selection operation,in which we
imitate a game of roulette and calculatethe total adaptability and
at the same time the relativeand accumulative adaptability for each
individual.Then the roulette is turned for 50 times and a
randomnumber is created between 0 and 1 for each time. Anindividual
can be selected by comparing the numberwith the accumulative
adaptability for each individual.For example, if we let rbe a
random number, thenfc(i)is the accumulative adaptability of
individual i and
fc(i+1) is the accumulative adaptability of individuali+1. If
fc(i) r fc(i+1), then individual i+1 will bechosen. By analogy, for
all the selected individualswe can compose a new genus group and
carry outcrossover and mutation operations.
A single point crossing method is used in crossoveroperations,
generating a random number between 0and 1 when searching in the
genus group. If thenumber is less than the crossover probability
and ithas selected an even number of individuals, then thecrossover
operation can be implemented after pairingrandomly. Taking the
individuals pand q as a pairedexample, we set the crossing point as
2, meaning thatwe choose the second gene to cross over. After
thecrossover operation, the individuals become
p andq .A uniform mutation method is adopted in this mu-
tation operation, generating a random number be-tween 0 and 1
when searching in the genus group. Ifthe number is less than the
probability of mutation,the current individual will mutate. The
mutation op-eration is similar to initialization in which we
rebuildgenes for an individual by the boundary of
designvariables.
After selection, crossover and mutation operations,an evaluation
function is called to insure that the bestindividual can be
preserved. The optimization results
(by conversion) are shown in Table 1.Table 1 Result of genetic
optimization
Optimizationvariables
a (mm) b (mm) d (mm) min () l(m)
Optimal values 10.07 690.54 788.01 52.11 0.48
Roundingvalues
10 691 788 52 0.5
The optimization results, which have been appliedin production
practice, can satisfy the constraint con-ditions. The Zhengzhou
Great Wall MetallurgyEquipment Factory, which cooperated with our
re-
search team, has produced corresponding crusherswhich have been
sold to a number of mines in China.According to the actual working
situation, the differ-ential and grading toothed roll crusher
possesses the
-
8/13/2019 Multi-Object
5/5
Journal of China University of Mining & Technology Vol.18
No.2320
characteristics of great crushing strength, high break-ing
efficiency, stable working state, high capability ofclearing
blockage and anti-blocking and stablegranularity of crushing
products, all of which havemet their expected design target.
6 Conclusions
We have used genetic algorithm to carry out amulti-object
optimized design for the breakingmechanism of a differential and
grading toothed rollcrusher by selection, crossover and mutation
opera-tions under certain constrained conditions. On thebasis of
this presentation, we may state the following:
1) Our differential and grading toothed roll crusherblends the
advantages of a toothed roll crusher and a
jaw crusher and possesses characteristics of great
crushing, high breaking efficiency, multi-sieving and,for the
moment, has made up for the shortcomings ofthe toothed roll
crusher.
2) Since it is different from traditional optimizingmethods, GA
can carry out heuristic global optimiza-tion. It is a parallel,
concurrent and gradually evolu-tion searching process in which a
local optimum isavoided.
3) The optimization results have been applied inpractice and the
actual crusher working state is stable.The industrial application
has been proven to goodeffect. It has also been shown that, in
order to opti-mize the crusher crank-rocker mechanism for
multi-object design with optimizing transmission an-gle and
minimizing the travel characteristic ofmoving jaw mas objective
functions, can obtain op-timum results.
Acknowledgements
The authors wish to express their most sincere ap-preciation to
Prof. Huang Jiaxing for giving valuableadvice. The authors are also
indebted to the Zheng-
zhou Great Wall Metallurgy Equipment Factory forproviding useful
material.
References
[1] Zhao L L, Zang F, Wang Z B, et al. Design and
motionsimulation for differential and grading toothed rollcrusher.
Coal Mine Machinery, 2007, 28(6): 1921. (InChinese)
[2] Li X, Wang G B. Optimum design of compound pendu-lum jaw
crusher with genetic algorithms. ConstructionMachinery, 2006(6):
5562. (In Chinese)
[3] Shen Y J. Optimum design for structure parameters of
PE250
750 compound pendulum jaw crusher.Machin-ery, 1994, 21(4): 2325.
(In Chinese)[4] Zheng S H. Application of genetic algorithm in
optimum
design of planar crank and rocker mechanisms. Journalof China
Institute of Metrology, 1999(2): 7174. (InChinese)
[5] Wang P. Optimum design for crank-rocker mechanism
ofcrusher.Journal of South China Construction University,1998,
6(2): 6065. (In Chinese)
[6] Holland J H. Adaptation in Natural and Artificial Sys-tems.
Michigan: The University of Michigan Press,1975.
[7] Pan F P, Gong D W, Sun X Y, et al. Research on noveladaptive
genetic algorithm. Journal of China Universityof Mining &
Technology, 2003, 32(1): 6870. (In Chi-
nese)[8] Michalewicz Z. Evolution Programsthe Combination
of Genetic Algorithm and Data Structures. Beijing: Sci-ence
Press, 2000. (In Chinese)
[9] Zhang J, Li D L, Li P. Comparative study of
geneticalgorithms encoding Mechanism. Journal of China Uni-versity
of Mining & Technology, 2002, 31(6): 637640.(In Chinese)