Embed Size (px)
Citation preview
Multi-agent Oriented Constraint Satisfaction
Authors: Jiming Liu, Han Jing and Y.Y. Tang
Speaker: Lin XuCSCE 976, May 1st 2002
Outline
1. Introduction2. The multi-agent model3. Approximate solution4. Empirical studies on extended
ERA methods5. Discussion6. Summary
Introduction
CSPs Related work Multi-agent system The proposed approach
CSPs A CSP consists of:
A finite set of variables A domain set, containing a finite and discrete
domain for each variable A constraint set, each constraint is a set of
tuples indicating the mutually consistent values of the variables
The solution, S, for a CSP is an assignment to all variables such that the assignment satisfies all given constraint
Example: n-queen, coloring problem
Related work General methods for solving CSP:
generate-test (GT) generates each possible combination of
the variables systematically and then checks whether it is a solution
Backtracking (BT) assignment values to variables
sequentially and then checks constraints for each variable assignment
In this respect, BT is more efficient than GT
Improvement for BT Avoid thrashing Consistency techniques (Arc consistency and k-
consistency) Avoid both thrashing and redundant-work Dependency-directed backtracking scheme Increasing the efficiency Search Order
BT is still unable to solve nontrivial large-scale CSPs in a reasonable runtime
Improvement for GT
Stochastic and heuristic algorithms most popular ideas is to perform local search Three key elements in local search
Configuration Evaluation value Neighbor
Local search uses repair or hill climbing To avoid local optima, random-walk and
tabu searchAlso: Hill-climbing, min-conflicts, MCRW and
GSAT
Min-conflicts heuristics Minton
Selects a new value that minimizes the number of outstanding constraint violation after each step
The multi-agent approach utilized the idea of inconsistency reduction on a complete initial assignment
The approach differs from the min-conflicts approach in a number of ways.
Other methods
Other methods for solving CSPs: Neural Network and Genetic Algorithms
all methods, techniques have their advantages and disadvantages
BT: small size problem, stable and complete
Local search: large scale problem, incomplete

Multi-agent systems
Computational systems in which several agents interact or work together in order to achieve goals
Agent may be homogeneous or heterogeneous
Agent may have the common goals or distinct goals
Distributed constraint satisfaction
Distributed CSP is a CSP in which variables and constraints are semantically partitioned into sub-problems, each of which is solved by an agent The agents have to comply with certain constraints
among them Find a solution requires that all agents find the values
for their variables that satisfy not only their own constraints but also interagent constraints
Yokoo et al. developed algorithm: asynchronous backtracking asynchronous weak-commitment search multi-agent real-time-A* algorithm
Swarm-like systems Swarm is a formulation for simulating
distributed multi-agent systems, which involves three key environment: Living environment Agents with reactive rules Schedule serving
Liu developed an evolutionary autonomous agent system An energy-based artificial-life model for
solving n-queen
The proposed approach
Environment, Reactive rules, and agents (ERA)
Intended to provided an alternative, multi-agent formulation that can solve general CSPs and to find approximate solution without too much cost
This system self-organizes itself The main difference between ERA and
local search: the evaluation value
The multi-agent model
ERA fundamentals
The basic ERA algorithm
Propitiates of the basic algorithm
ERA fundamentals
The notions of agent and multi-agent system can be defined as:
An agent is a virtual entity Be able to live and act in the
environment Be able to sense its local environment Be driven by certain objectives Have some reactive behaviors
ERA fundamentals (cont’d)A multi-agent system is a system
that contains: An environment E is a space in which the agent
live A set of reactive rules, R, governing the
interaction between the agents and their environment, they are the laws of the agent universe
A set of agents, A={a1, a2, a3,…, an}
Goal: examine how exact or approximate solutions to CSPs can self-organized by a multi-agent system, consisting of {E, R, A}
Overview of the multi-agent formulation
Environment records the number of constraint violations of the current state
Agent represents a variable and the position of agent corresponds the value
Objective is the move to a position whose constraint violation number is 0
Solution state is when every agent finds its zero-position
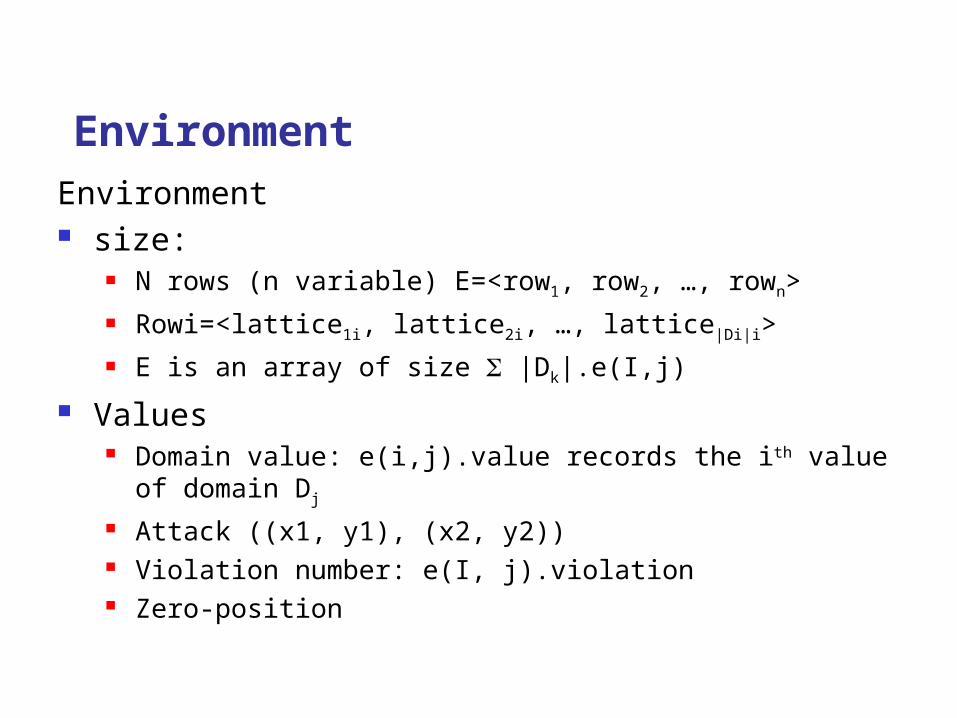
EnvironmentEnvironment size:
N rows (n variable) E=<row1, row2, …, rown> Rowi=<lattice1i, lattice2i, …, lattice|Di|i> E is an array of size |Dk|.e(I,j)
Values Domain value: e(i,j).value records the ith value of domain
Dj
Attack ((x1, y1), (x2, y2)) Violation number: e(I, j).violation Zero-position
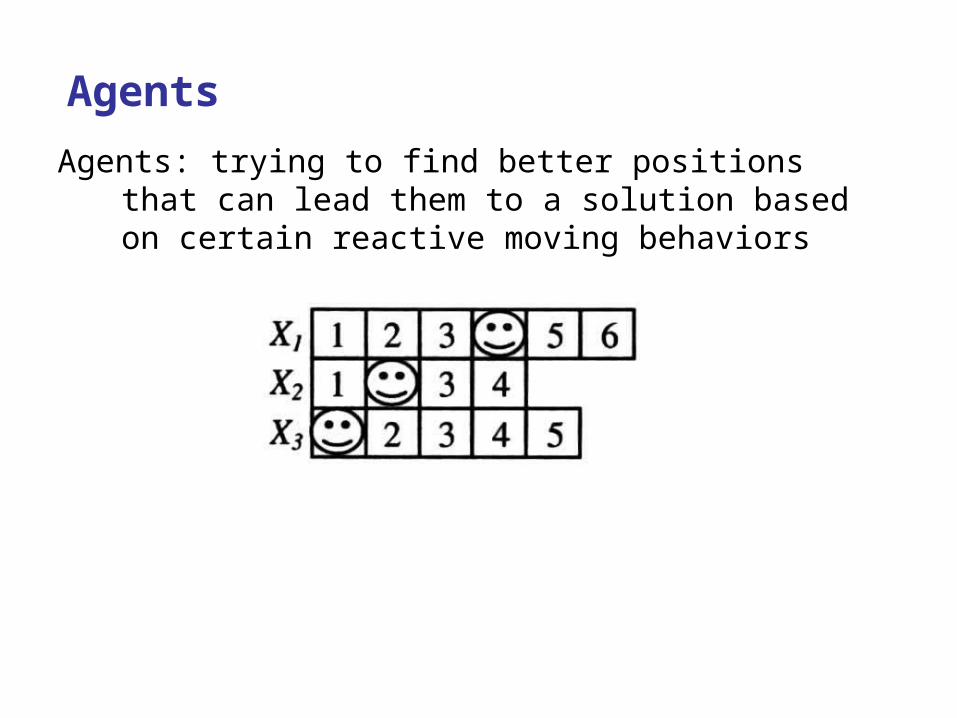
Agents
Agents: trying to find better positions that can lead them to a solution based on certain reactive moving behaviors
Local reactive behaviors
To find a solution state, the agents will select and execute some predefined local reactive behaviors Least-move Better-move Random-move

System schedule
Time step =0: the system is initialized Time step time step+1:one unit
increment of the system clock, all agent have a chance to decide their moves
End: all agents are at zero-positions or its clock exceeds a time threshold
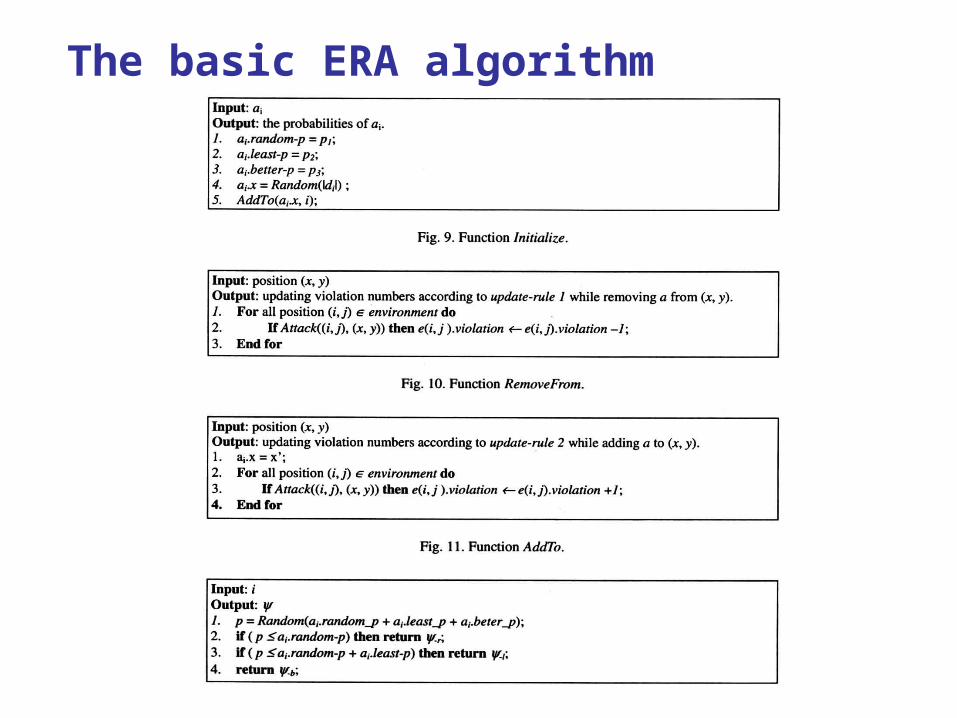
The basic ERA algorithm
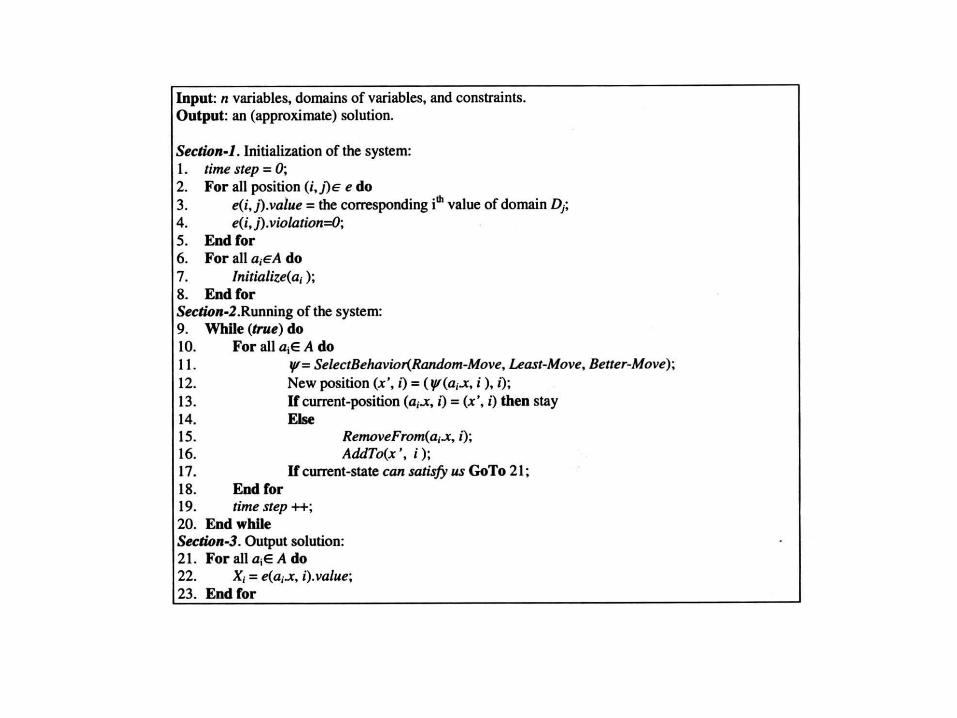
Properties of the basic ERA algorithm
Termination Correctness Complexity
Space complexity is O(|Di|) Time complexity of the initialization is O(|
Di|) Time complexity of each step is O(n|Di|) in
the worst case
Approximate solution
Each state represents an approximate solution
The system always evolves toward a better state in which more constraints are satisfied
After a few step, the assignments of most variables will satisfy constraints
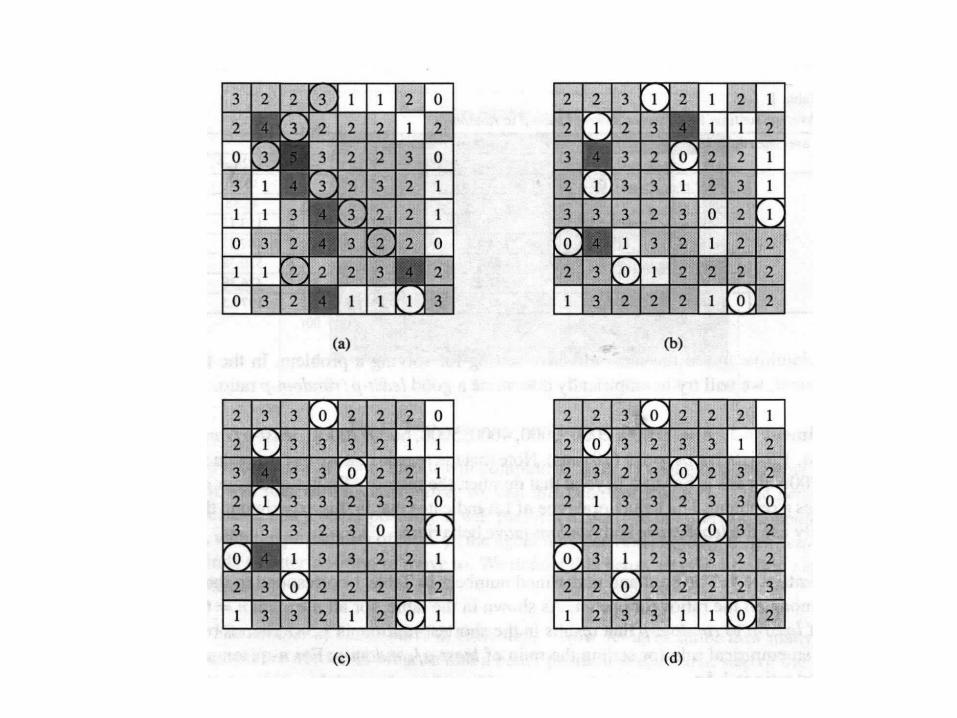
Empirical studies on extended ERA methods with behavior prioritization and different selection probabilities
Presents several empirical results on solving different n-queen and coloring problem
Discusses how to apply and implement this approach by choosing the probabilities of least-move and random-move
Examines the effectiveness of prioritizing agent behaviors in order to efficiently derive an approximate solution
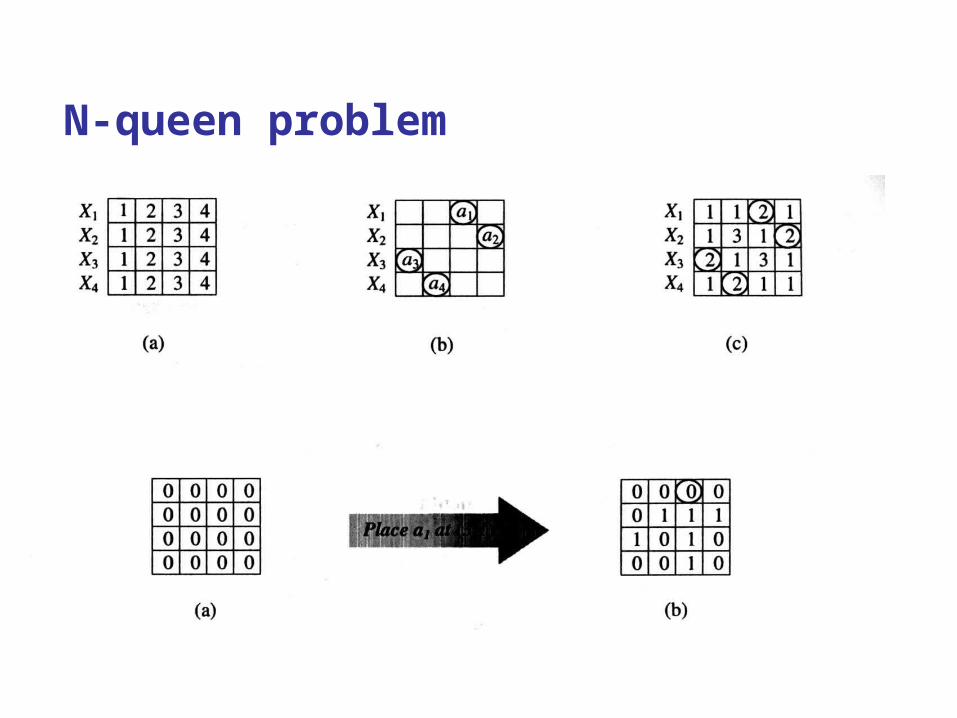
N-queen problem
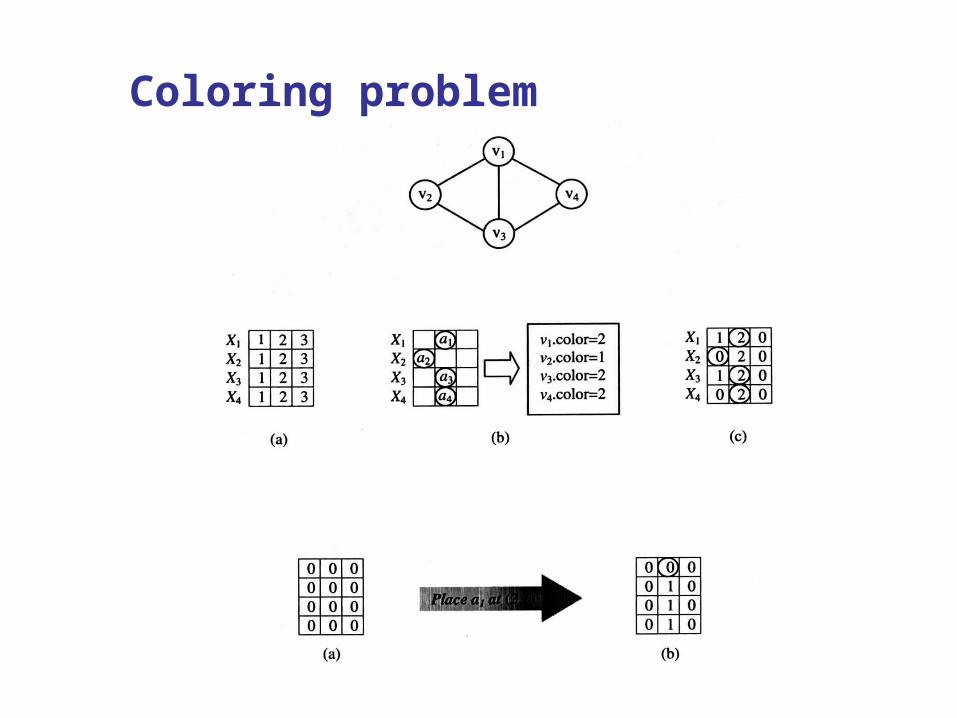
Coloring problem
Discussion
Comparison with min-conflicts heuristics Comparison with Yokoo et al.’s
distributed constraint satisfaction Remarks on partial constraint
satisfaction Remarks on agent information and
communication for conflict-check Remarks on sequential-iteration
implementation
Summary Described a multi-agent oriented
approach to solving CSP: ERA Introduced three reactive behaviors:
better-move, least-move and random-move
Presented several empirical studies Compared the ERA with some of the
existing heuristic
Questions?If not, let’s start the
discussion





























