Embed Size (px)
Citation preview

Método de auto-foco para retinógrafos digitais usando lógica fuzzy
José Augusto Stuchi
Departamento de Engenharia Elétrica e Computação Escola de Engenharia de São Carlos Universidade de São Paulo (USP)
Abstract – The use of fundus camera to analyze the retina allows the diagnostics of many pathologies such as macular degeneration, glaucoma and even hypertension. However, a common problem in retinography exams is the correct alignment of the equipment light inside the patient eye to obtain the pictures of the retina. Because of the eye movements, it is very difficult to position the light inside the eye and find the correct focus of the retina, because of the crystalline lens, that change the patient focus distance. Thus, this work presents a method for fundus camera autofocus using fuzzy logic that helps the equipment operator easily finding the retina focus. Palavras-chave: retinografia digital, lógica nebulosa, autofoco.
1. Introdução
Um dos equipamentos mais comuns usado para a observação da retina é o retinógrafo digital. Esse equipamento é composto por lentes, espelhos, filtros, sistema de iluminação e câmeras e objetiva aplicar uma iluminação homogênea na retina que, depois de ajustado o foco, é imageada para o diagnóstico de possíveis patologias.
O procedimento comum em exames de retinografia consiste em dilatar a pupila do paciente utilizando colírios midriáticos. Essa dilatação permite que mais luz gerada pelo equipamento atinja a retina, o que resulta em fotos com melhor foco e consequente mais informação. Entretanto, visando a diminuir a intrusão do exame, vários equipamentos permitem a realização de fotos não-midriáticas, nas quais não é necessário utilizar colírio para dilatar o olho do paciente.
Porém, quanto menos luz atinge o olho do paciente, mais difícil a determinação manual do foco na retina, devido à diminuição das componentes de alta frequência da imagem na previsão e consequente menor relação sinal ruído, o que resulta em borramento na imagem.
Assim, alguns retinógrafos usam sistemas de foco automático parecidos com câmeras digitais, porém com algumas peculiaridades por se tratar de foco na retina, dado que o olho possui o conjunto de lentes do cristalino que muda a distância focal de paciente para paciente.
Dessa forma, busca-se por técnicas que não adicionem custos ao equipamento e que consigam, ainda assim, serem eficientes para realizar o foco automático na retina. Nesse contexto, destacam-se técnicas por análise de imagens, normalmente baseadas no valor do RMS (Root Mean Square), o qual permite
quantificar a informação do foco para cada quadro capturado.
O ponto de melhor foco é aquele que apresenta o maior RMS. Como exemplo, é exibido na Figura 1 um gráfico típico de RMS em função da posição do motor que movimenta as lentes do sistema de foco. Nesse caso, o melhor foco estaria próximo à posição 21.
Figura 1: RMS pela posição do motor do foco
Baseado nisso, este trabalho apresenta um método para a execução de autofoco em retinógrafos digitais baseado em análise de imagens e lógica fuzzy. Tais técnicas utilizadas em conjunto permitem determinar a quantidade de passos a serem realizados pelo motor até a sua convergência e consequente localização do foco.
Na seção 2 a metodologia empregada é apresentada. Os resultados preliminares são exibidos e analisados na seção 3. Finalmente, na seção 4, as conclusões são apresentadas.
2. Metodologia
Conforme exibido na introdução, para quantificar se o sistema se aproxima ou afasta do ponto de melhor foco, o RMS do quadro obtido da câmera no modo de previsão é calculado usando a seguinte equação do RMS Contrast [3]:
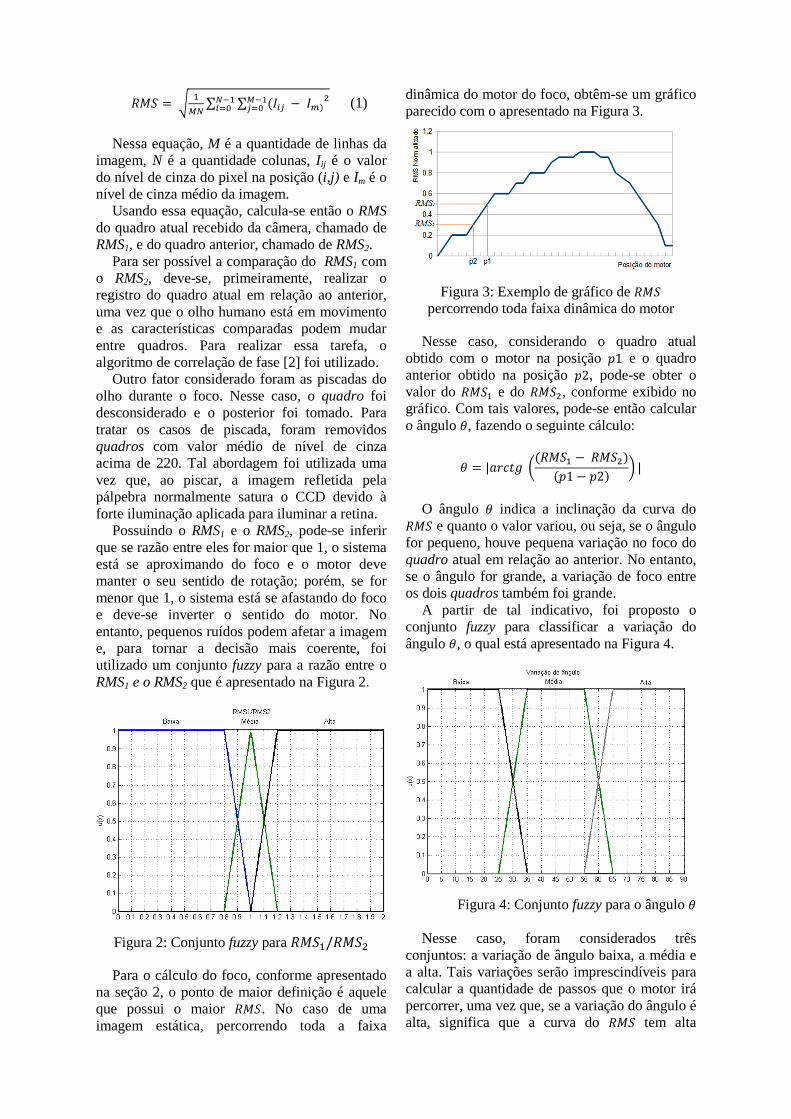
��� � � ��∑ ∑ �� � ������������� �� (1)
Nessa equação, M é a quantidade de linhas da
imagem, N é a quantidade colunas, Iij é o valor do nível de cinza do pixel na posição (i,j) e Im é o nível de cinza médio da imagem.
Usando essa equação, calcula-se então o RMS do quadro atual recebido da câmera, chamado de RMS1, e do quadro anterior, chamado de RMS2.
Para ser possível a comparação do RMS1 com o RMS2, deve-se, primeiramente, realizar o registro do quadro atual em relação ao anterior, uma vez que o olho humano está em movimento e as características comparadas podem mudar entre quadros. Para realizar essa tarefa, o algoritmo de correlação de fase [2] foi utilizado.
Outro fator considerado foram as piscadas do olho durante o foco. Nesse caso, o quadro foi desconsiderado e o posterior foi tomado. Para tratar os casos de piscada, foram removidos quadros com valor médio de nível de cinza acima de 220. Tal abordagem foi utilizada uma vez que, ao piscar, a imagem refletida pela pálpebra normalmente satura o CCD devido à forte iluminação aplicada para iluminar a retina.
Possuindo o RMS1 e o RMS2, pode-se inferir que se razão entre eles for maior que 1, o sistema está se aproximando do foco e o motor deve manter o seu sentido de rotação; porém, se for menor que 1, o sistema está se afastando do foco e deve-se inverter o sentido do motor. No entanto, pequenos ruídos podem afetar a imagem e, para tornar a decisão mais coerente, foi utilizado um conjunto fuzzy para a razão entre o RMS1 e o RMS2 que é apresentado na Figura 2.
Figura 2: Conjunto fuzzy para ����/���� Para o cálculo do foco, conforme apresentado
na seção 2, o ponto de maior definição é aquele que possui o maior ���. No caso de uma imagem estática, percorrendo toda a faixa
dinâmica do motor do foco, obtêm-se um gráfico parecido com o apresentado na Figura 3.
Figura 3: Exemplo de gráfico de ��� percorrendo toda faixa dinâmica do motor
Nesse caso, considerando o quadro atual obtido com o motor na posição �1 e o quadro anterior obtido na posição �2, pode-se obter o valor do ���� e do ����, conforme exibido no gráfico. Com tais valores, pode-se então calcular o ângulo �, fazendo o seguinte cálculo:
� � |���� !����� ��������1 � �2� " | O ângulo � indica a inclinação da curva do
��� e quanto o valor variou, ou seja, se o ângulo for pequeno, houve pequena variação no foco do quadro atual em relação ao anterior. No entanto, se o ângulo for grande, a variação de foco entre os dois quadros também foi grande.
A partir de tal indicativo, foi proposto o conjunto fuzzy para classificar a variação do ângulo �, o qual está apresentado na Figura 4.
Figura 4: Conjunto fuzzy para o ângulo � Nesse caso, foram considerados três
conjuntos: a variação de ângulo baixa, a média e a alta. Tais variações serão imprescindíveis para calcular a quantidade de passos que o motor irá percorrer, uma vez que, se a variação do ângulo é alta, significa que a curva do ��� tem alta

inclinação e deve-se utilizar uma quantidade de passos baixa, enquanto que se a variação do ângulo for baixa, significa que a curva tem baixa inclinação e pode ser utilizada uma quantidade de passos maior.
A partir da razão entre o ��� e a variação do ângulo, pretende-se, então, determinar a quantidade de passos que o motor percorrerá para cada situação.
Para representar a quantidade de passos, o conjunto fuzzy apresentado na Figura 5 foi proposto, no qual tal quantidade foi classificada em muito pequena, pequena, média e grande. Vale constar aqui a quantidade de passos total do curso completo do motor: 1850 passos.
Figura 5: Conjunto fuzzy para a quantidade de passos
Usando lógica fuzzy, as seguintes regras foram criadas para a determinação dos passos:
Tabela 1. Regras para os conjuntos fuzzy. Razão RMS Variação θ Qtde passos
Baixa Baixa Média Baixa Média Pequena Baixa Alta Muito pequena Média Baixa Muito pequena Média Média Muito pequena Média Alta Muito pequena Alta Baixa Grande Alta Média Média Alta Alta Pequena
A lógica das regras se baseia nos seguintes
preceitos: • se a razão do ��� é baixa, significa que o
���� é menor que o ����, ou seja, o valor atual está diminuindo, e o motor deve inverter o sentido; nesse caso, deve-se ser mais cauteloso quanto à quantidade de passos para não ficar oscilando próximo ao foco e, assim, a quantidade de passos
permitida é a muito pequena, pequena e média;
• se a razão do ��� é média, significa que o ���� e o ���� estão bastante próximos, ou seja, provavelmente está próximo ao ponto de foco e os passos devem ser muito pequenos, apenas para o ajuste fino;
• se a razão do ��� é alta, significa que o ���� é maior que o ���� e o sistema está a caminho do foco, devendo manter seus passos nesse sentido, podendo, dessa forma, dar maior quantidade de passos (quantidade de passos pequena, média e grande) para chegar mais rápido ao foco.
Possuindo tais conjuntos fuzzy e regras associadas, foram então elaborados os procedimentos computacionais para que, a partir da razão do ��� e da variação do ângulo, pudesse ser determinada a quantidade de passos que seria aplicado no motor na próxima iteração do cálculo do foco.
Para isso, foram utilizados 500 pontos de discretização para todos os universos de discurso. Para o operador de composição, foi utilizado o do tipo Max-Min e, para o operador de implicação, o de Mamdani. Já para o de agregação, foi utilizado o máximo e, para o operador mínimo, o conectivo E [4].
Na figura 6 é exibido o conjunto fuzzy encontrado para um ângulo de 0.7° e razão ��� � 1.02. Nota-se, nesse caso, que a quantidade de passos de saída é bastante pequena, uma vez que o sistema, devido ao valor do ��� e do ângulo, está bastante próximo do ponto de melhor foco.
Figura 6: Conjunto fuzzy de passos resultante para ângulo = 0.7° e razão ��� = 1.02
3. Resultados
A aplicação do método proposto apresentou bom resultado para imagens estáticas do olho

mecânico, focando corretamente para um tempo inferior a três segundos, independente da posição inicial do motor do foco. O olho mecânico é um modelo que simula as estruturas do olho natural e sua interação com a luz.
Figura 7: Imagem do olho mecânico antes (esquerda) e após (direita) o foco
Ao movimentar o olho mecânico durante o
autofoco, na grande maioria das vezes o foco foi encontrado corretamente. No entanto, em poucos casos, o algoritmo parou sem encontrar o melhor foco. Tal fato pode ter ocorrido por problemas no registro entre o quadro atual e o anterior ou mesmo por encontrar dois valores de ��� muito próximos em regiões distantes, como exibido na Figura 8.
Figura 8: Problema na condição de parada do método
Nesse caso, o valor do ��� para o quadro
atual e o quadro anterior estão muito próximos e o ângulo está em torno de 0°. Ao verificar o critério de parada, o qual está baseado em um erro % definido inicialmente, o método decide parar, uma vez que a diferença entre o ��� atual e o anterior é muito pequena e menor que %. No entanto, o ponto de melhor foco ainda não foi encontrado.
Para contornar esse tipo de problema, foi adicionada à condição de parada a condição de que a quantidade de passos deveria ser muito pequena. Isso fez com que o autofoco tivesse seu desempenho melhorado e nos 200 testes realizados notou-se, via inspeção visual, que o índice de acerto de foco foi superior a 95%.
4. Conclusão
O método proposto apresenta uma forma simples e eficiente para a realização de foco automático em retinógrafos digitais usando lógica fuzzy.
Notou-se que a lógica fuzzy permite uma avaliação mais justa dos parâmetros do algoritmo de autofoco.
Além disso, a implementação auxiliou na criação de regras para determinar a quantidade de passos do motor na próxima iteração, o que possibilitou agilizar a convergência do método. O método anteriormente utilizado fazia o uso de lógica clássica e decrementava a quantidade de passos até ficar com tal quantidade bastante pequena, permitindo uma quantidade grande ou média, mesmo se estivesse próximo da solução. Já o método com lógica fuzzy permite que se deem passos menores quando está perto da solução, ou seja, quando a razão entre o ��� do quadro atual e do anterior estiver próximo a 1. Isso fez com que o foco fosse encontrado em menos de 3 segundos para os testes realizados, independente da posição inicial do motor, enquanto a solução anterior com lógica clássica demorava em torno de 8 segundos.
Como trabalho futuro, testes em laboratório serão realizados em pacientes para verificar se o método é robusto à grande movimentação voluntária e involuntária que o olho humano apresenta. Possivelmente, algumas alterações precisarão ser realizadas, principalmente relacionadas ao critério de parada do método. Além disso, métodos de otimização dinâmica podem ser aplicados e serão estudados.
Agradecimentos Agradeço ao Dr. Mário Stefani pelo incentivo às
atividades acadêmicas nas dependências da Opto e a todos os colegas que contribuíram para o desenvolvimento deste trabalho.
Referências Bibliográficas [1] Pasqual, F., Rodrigues, E. Influência do Uso de
Sensores Coloridos em Retinógrafos Digitais. Workshop de Visão Computacional, 2010.
[2] Pratt, W. Digital Image Processing, 4th Ed., Wiley,
2007. [3] Peli, E. Contrast in complex images. Journal of the
Optical Society of America, pag. 2033, 1992. [4] T. J., Ross. Fuzzy Logic with Engineering
Applications, 2nd Ed Wiley, 2004.