Embed Size (px)
Citation preview

MSO3120 Real and Complex Analysis
Nick Sharples
2016–2017

Nick Sharples ©2016 Middlesex University 2

Contents
I Multivariable calculus 5
1 Review 7
1.1 One dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 Differentiation: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.2 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.3 The Fundamental Theorem of Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Higher dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.1 Basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.2 Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.3 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Vector algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1 Dot product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.2 Cross product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Fundamentals 13
2.1 Vector-valued functions of many variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Plotting skills . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.1 Functions f : R2 → R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2 Vector fields v : R2 → R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Multivariable differentiation 17
3.1 Differentiation as linear approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.1 Higher Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.2 Graphical interpretation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Functions of 1 variable f : R→ Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 Functions of many variables f : Rm → Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3.1 Directional Derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3.2 Partial derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4 Differentiation rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3

3.4.1 Product rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4.2 Chain rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.5 Important cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.5.1 Scalar functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.5.2 Scalar functions: Higher order derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.5.3 Vector fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Integration along curves 47
4.1 Paths and Curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2 Motivating idea: integrating functions f : R→ R . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3 Integrating scalar functions f : Rm → R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3.1 Integration of scalar functions: heuristic approach . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3.2 Integration of scalar functions: formal definition . . . . . . . . . . . . . . . . . . . . . . . . 54
4.3.3 Arc length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4 Integrating vector fields v : Rm → Rm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.4.1 Integration of vector fields: heuristic approach . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.4.2 Fundamental Theorem of Calculus I: The Gradient Theorem . . . . . . . . . . . . . . . . . . . 62
5 Integrating over surfaces 65
5.1 Flat space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.1.1 Fundamental Theorem of Calculus II: Green’s Theorem . . . . . . . . . . . . . . . . . . . . . 67
5.2 Curved space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.2.1 Defining surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2.2 More general surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.2.3 Integration of scalar functions: heuristic definition . . . . . . . . . . . . . . . . . . . . . . . 75
5.2.4 Integration of scalar functions: formal definition . . . . . . . . . . . . . . . . . . . . . . . . 78
5.3 Integrating vector fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3.1 Fundamental Theorem of Calculus III: Stoke’s Theorem . . . . . . . . . . . . . . . . . . . . . 85
5.3.2 Fundamental Theorem of Calculus IV: The Divergence Theorem . . . . . . . . . . . . . . . . 87
5.4 Final remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Nick Sharples ©2016 Middlesex University 4

Part I
Multivariable calculus
5


Chapter 1
Review
The main goal of this chapter is to develop a theory of integration and differentiation in Rn. We will often consider
n = 3 as this space is used to model a huge variety of problems in physics and engineering.
1.1 One dimension
First we will quickly recap what we know about Calculus in 1 dimension:
1.1.1 Differentiation:
• The derivative of a function f : R→ R at the point x ∈ R is defined as
limh→0
f (x + h)− f (x)h
∈ R (1.1)
provided that this limit exists. If this limit exists then we say that “f has a derivative at x ∈ R”, or “f is
differentiable at x ∈ R”.
• If the limit (1.1) exists we denote it by dfdx (x) or f′ (x).
• The derivative is the ‘rate of change’ of the function f at the point x .
• We know the derivatives of many common functions, such as
– polynomials: x3, xn, 4x7 + 3x3 + 2x + 4
– trigonometric functions: sin, cos, tan
– hyperbolic functions: sinh, cosh, tanh
– exponential functions: ex , log (x)
• We know a variety of techniques to find the derivatives of more complicated functions, such as
– the chain rule,
– the product rule, and
– the quotient rule.
• Taylor’s Theorem.
7

1.1.2 Integration
• A partition P of an interval [a, b] is a sequence of finitely many numbers a = x0 < x1 < x2 < · · · < xn = b.
• Let f : [a, b] → R be a bounded function and let P = x0, . . . , xn be a partition of [a, b]. The upper and
lower Riemann sums of f with respect to P are
U (f ;P ) =
n∑k=1
(xk − xk−1) supx∈[xk−1,xk ]
f (x)
and L (f ;P ) =
n∑k=1
(xk − xk−1) infx∈[xk−1,xk ]
f (x)
respectively.
• A bounded function is Riemann integrable if its smallest upper Riemann sum is equal to its largest lower
Riemann sum
Definition 1.1: Riemann integration
A bounded function f : [a, b]→ R is Riemann integrable if
inf U (f ;P ) |P is a partition of [a, b] = sup L (f ;P ) |P is a partition of [a, b] (1.2)
• The Riemann integral of a bounded function f : [a, b]→ R is defined as the common value of (1.2) i.e.
∫ ba
f (x) dx := inf U (f ;P ) |P is a partition of [a, b] = sup L (f ;P ) |P is a partition of [a, b]
• The Riemann integral is the ‘area under the graph’ of the function f .
• If f : [a, b]→ R is continuous then f is Riemann integrable. Further∫ b
a
f (x) dx = limδ→0
∑k
f (xk) δxk (1.3)
where the xk ∈ [a, b] are equally spaced points with δxk := |xk − xk−1| ≤ δ for all k .
• We know the Riemann integrals of many common functions, such as
– polynomials: x3, xn, 4x7 + 3x3 + 2x + 4
– trigonometric functions: sin, cos, tan
– hyperbolic functions: sinh, cosh, tanh
– exponential functions: ex , log (x)
• We know a variety of techniques to find the integrals of more complicated functions, such as
– change of variables, and
– integration by parts.
In the second part of this course we will introduce Lebesgue Integration, which is a more powerful theory of
integration. Until then, all integrals we consider here are Riemann integrals defined as in Definition 1.1.
The functions considered in this part of the course (all of these notes) will be continuous, so we will use the simpler
formulation of integration described in (1.3).
Nick Sharples ©2016 Middlesex University 8

1.1.3 The Fundamental Theorem of Calculus
From the definitions it isn’t immediate that integration and differentiation are closely related. The link between
these two distinct concepts is described in the following theorem:
Theorem 1.2: Fundamental Theorem of Calculus
1. If f : [a, b] → R is Riemann integrable and there exists a differentiable function F : [a, b] → R such
that f = F ′ then ∫ b
a
f (x) dx = F (b)− F (a) .
2. Let f : [a, b]→ R be integrable. If G : [a, b]→ R is the function defined by
G (x) =
∫ x
a
f (z) dz
then G is continuous on [a, b]. Further, if f is continuous at x0 ∈ [a, b] then G is differentiable at x0and G′ (x0) = f (x0).
The Fundamental Theorem of Calculus essentially says that integration can be thought of as the ‘inverse’ of dif-
ferentiation, provided that the functions are nice enough. One major goal of this course is to understand several
Fundamental Theorems of Calculus in higher dimensions.
1.2 Higher dimensions
Now we recap what we know about Calculus in multiple dimensions (From MSO1120 Calculus and Differential
Equations).
1.2.1 Basics
• Plotting graphs of functions f : R2 → R
• Drawing level sets (x, y) |f (x, y) = c for different values of c ∈ R.
1.2.2 Differentiation
• Calculating partial derivatives ∂f∂x ,∂f∂y etc.
• The chain rule
• Calculating higher order partial derivatives ∂2f∂x2 ,
∂2f∂x∂y etc.
• Calculating the Jacobian of a function f : R2 → R2.
1.2.3 Integration
• Double integration to integrate f : R2 → R over a region of R2.
• Change of variables using the determinant of the Jacobian.
Nick Sharples ©2016 Middlesex University 9

1.3 Vector algebra
Here we collect the notation and some facts about vectors in Rn. A vector x ∈ Rn is an n×1matrix of real numbersx1...
xn
We can perform the following operations on vectors:
• add them: x+ y =
x1...
xn
+y1...
yn
=x1 + y1
...
xn + yn
• subtract them: x− y =
x1...
xn
−y1...
yn
=x1 − y1
...
xn − yn
• take a scalar multiple: for λ ∈ R the vector λx =
λx1...
λxn
1.3.1 Dot product
The dot product of two vectors a ∈ Rn and b ∈ Rn is defined as
a · b =n∑i=1
aibi = a1b1 + a2b2 + . . .+ anbn.
Geometrically, the dot product can be used to calculate the angle between two vectors as
a · b = |a| |b| cos θ (1.4)
where θ is the angle between the vectors a and b.
a
b
θ
The dot product of a and b can be interpreted as the ‘amount’ that the vectors a and b point in the same direction:
a ·b is maximised when a = b, minimised when a = −b, and is equal to zero if the two vectors are at right-angles.
We say that two non-zero vectors a,b ∈ Rn are orthogonal if a · b = 0. Geometrically, we see from (1.4) that the
angle between orthogonal vectors must be π/2.
Nick Sharples ©2016 Middlesex University 10

1.3.2 Cross product
In 3-dimensions the cross product of two vectors a ∈ R3 and b ∈ R3 is defined as
a× b =
a2b3 − a3b2
a3b1 − a1b3
a1b2 − a2b1
.
It may be easier to remember this formula as matrix determinant
a× b = det
e1 e2 e3
a1 a2 a3
b1 b2 b3
.
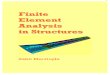
Geometrically, the cross product can be used to find a vector that is orthogonal to both a and b, as
a× b = |a| |b| sin (θ)n (1.5)
where
• θ is the angle between a and b and
• n is a unit vector orthogonal to the plane containing a and b, determined by the Right Hand Rule.
x
z
y
a
b
a× b
Right Hand Rule:
Figure 1.1: The Right Hand Rule for cross products1
.
1By User:Acdx - Self-made, based on Image:Right_hand_cross_product.png, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=4436743
Nick Sharples ©2016 Middlesex University 11

Further, the magnitude |a× b| is the area of the parallelogram having a and b as sides: recall that the area of a
parallelogram
a
b
h
is the base |b| times the height h. But h = |a| sin θ where θ is the angle between a and b. So the area is |b| |a| sin θ.Comparing to (1.5) we see that the magnitude of the cross product gives the area.
Nick Sharples ©2016 Middlesex University 12

Chapter 2
Fundamentals
2.1 Vector-valued functions of many variables
One of the big changes in multivariable calculus is the wider variety of functions that we can study. In the single
variable case we exclusively study functions f : R→ R. In the multiple variable case we look at functions:
f : Rm → Rn
for n,m = 1, 2, 3, . . .
• If m = 1 then we say that f is a function of one variable,
• If m ≥ 2 then we say that f is a function of many variables.
• If n = 1 then we say that f is a scalar function.
• If n ≥ 2 then we say that f is a vector function, and we use the bold font to remind us of this.
• If n = m ≥ 2 then we say that f is a vector field.
A function f : Rm → Rn can be written:
f (x1, . . . xm) =
f1 (x1, . . . , xm)
f2 (x1, . . . , xm)
...
fn (x1, . . . , xm)
or f (x1, . . . , xm) = (f1 (x1, . . . , xm) , f2 (x1, . . . , xm) , . . . , fn (x1, . . . , xm))
T
or f (x1, . . . , xm) = e1f1 (x1, . . . , xm) + e2f2 (x1, . . . , xm) + · · ·+ enfn (x1, . . . , xm)
where
• each component fj is a function fj : Rm → R
• the basis vectors ej ∈ Rn have a 1 in the j th component and a 0 in all other components, i.e.
ej = (0, . . . , 0︸ ︷︷ ︸1,...,j−1
, 1︸︷︷︸j
, 0, . . . 0︸ ︷︷ ︸j+1,...,n
)T
13

The superscript T means “take the matrix transpose”, so
(a, b, c, d)T =
a
b
c
d
.
It may seem pedantic to insist that (a, b) is not a point in R2 and that (a, b)T is a point in R2. This is a deliberate
decision for this course so that matrix multiplication works as expected.
Sometimes in mathematics we ‘abuse’ notation, and write things like (a, b, c, d) = (a, b, c, d)T , which has no realconsequence if we are sure about what operations are and are not allowed on these objects. Until we are sure (by
the end of this course!) we will insist that vectors are written as ‘column vectors’.
2.2 Plotting skills
2.2.1 Functions f : R2 → R
The graph of a function f : R2 → R can be drawn as (a 2-dimensional projection of) a 3-dimensional object. To
draw these functions accurately we will use the following techniques:
• coordinate slicing, and
• level set (contour) plotting.
Example 2.1.
P Draw the graph of f (x, y) = x2 − y2.
Nick Sharples ©2016 Middlesex University 14

2.2.2 Vector fields v : R2 → R2
The graph of the vector field v : R2 → R2 is the object
graph (v) =(x, y , v1 (x, y) , v2 (x, y))
T∣∣ (x, y) ∈ R2
which is a subset of 4-dimensional space, which is very difficult to visualise! Instead, we can plot the vector field
v as a lattice of 2-dimensional arrows on R2:
Example 2.2.
P Plot the vector field v (x, y) = ( xy ).
−2 −1 1 2
−2
−1
1
2
Plot of the vector field v
Example 2.3.
P Plot the vector field w (x, y) =(y−x
).
−2 −1 1 2
−2
−1
1
2
Plot of the vector field w
Nick Sharples ©2016 Middlesex University 15

Nick Sharples ©2016 Middlesex University 16

Chapter 3
Multivariable differentiation
3.1 Differentiation as linear approximation
For a function f : R→ R you should be familiar with the definition of a derivative.
Definition 3.1:
A function f : R→ R is differentiable at p ∈ R if the limit
f ′ (p) = limh→0
f (p + h)− f (p)h
exists. If the limit exists then f ′ (p) is called the derivative of f at the point p.
The key observation from this definition is that if a function f is differentiable at p ∈ R then there is a good linearapproximation of f at p. Graphically this linear approximation is a a tangent to the graph of f at the point p:
(p, f (p))
p
f (x)
L (x)
More precisely, by a ‘good linear approximation’ at p we mean a function L (x) = ax + b such that
1) L (p) = f (p), and
2) the difference f (x)− L (x) is so small near x = p that
limh→0
f (p + h)− L (p + h)h
= 0.
17

Condition 2 means that the difference between f and the linear function L (i.e. the error of the approximation)
goes to zero faster than h goes to zero.
Lemma 3.2:
A function f : R→ R is differentiable at p ∈ R if and only if there is a good linear approximation of f at p.
Furthermore, if f is differentiable at p then the linear approximation is unique and given by
L (x) = f (p) + (x − p) f ′ (p) .
Proof. Suppose that there exists a linear approximation L (x) = ax + b. Condition 1 implies that
L (x) = a (x − p) + f (p) .
Condition 2 then implies that
0 = limh→0
f (x + h)− L (x + h)h
= limh→0
f (p + h)− a (p + h − p)− f (p)h
= limh→0
f (p + h)− ah − f (p)h
= limh→0
f (p + h)− f (p)h
− a
hence the limit limh→0f (p+h)−f (p)
h exists and is equal to a, which is precisely that f ′ (p) = a.
Conversely, suppose that f ′ (p) exists. Then the function L (x) = f (p) + (x − p) f ′ (p) satisfies L (p) = f (p), socondition 1 is satisfied. Further
limh→0
f (p + h)− L (p + h)h
= limh→0
f (p + h)− f (p)− (p + h − p) f ′ (p)h
= limh→0
f (p + h)− f (p)− hf ′ (p)h
= limh→0
f (p + h)− f (p)h
− f ′ (p)
= f ′ (p)− f ′ (p) = 0
hence L satisfies condition 2.
This lemma essentially tells us that differentiation is the same thing as finding a good linear approximation. In
higher dimensions we will use linear approximations to define differentiation.
Nick Sharples ©2016 Middlesex University 18

3.1.1 Higher Dimensions
We now define differentiation as the linear approximation of functions.
Let f : Rm → Rn be a vector valued function. What does a linear approximation of f at the point p ∈ Rm look like?
Well, a linear map L : Rm → Rn has the form
L (x) = A · x+ b
where b ∈ Rn and A is an n ×m matrix (recall MSO1110 Vectors and Matrices).
First, we want the linear map L to agree with the function f at the point p. So L (p) = f (p), which implies that
b = f (p)− A · p
hence
L (x) = A · (x− p) + f (p) . (3.1)
Next, we want the difference L (x)− f (x) to be small near the point p.
Remember that p is a point in Rm so there are points near p in many different directions. In the one dimensional
case there were only two directions (h positive or h negative). In the m-dimensional case h can take any value in
Rm.
Rm
p h
Rn
f
h is some vector in Rmin one of many possible directions
More precisely if we consider the points p+ h for ‘small’ h, we want the difference
f (p+ h)− L (p+ h) = f (p+ h)− A · (p+ h− p)− f (p)
to go to zero faster than h goes to zero. That is, we want
limh→0
|f (p+ h)− f (p)− A · h||h| = 0
where h ∈ Rm.
This leads us to the following definition:
Nick Sharples ©2016 Middlesex University 19

Definition 3.3:
A function f : Rm → Rn is differentiable at p if there exists an n ×m matrix A such that
limh→0
|f (p+ h)− f (p)− A · h||h| = 0
where h ∈ Rm.
If it exists, the matrix A is unique, is denoted ∇f (p), and is called the derivative of f at p.
The key point is that the matrix A is independent of h: for f to be differentiable at p there must be one matrix A
satisfying the above limit no matter the direction that the vector h approaches zero.
Definition 3.4:
A function f : Rm → Rn is called differentiable if it is differentiable at every point p ∈ Rm.
Example 3.5.
P The function f : R2 → R3 defined by
f (x, y) =
x2
xy
y2
is differentiable at the point p = ( 11 ) with derivative
∇f (p) =
2 0
1 1
0 2
Nick Sharples ©2016 Middlesex University 20

3.1.2 Graphical interpretation
In low dimensions we can interpret the derivative graphically.
If a scalar function f : R2 → R is differentiable at p ∈ R2 then the derivative ∇f (p) describes a plane tangent to
the graph of f at the point p:
p
(p, f (p))
f (x)
L (x)
We defined the derivative using the best linear approximation of f at the point p, which was given by the formula
(3.1). Consequently, this plane is the graph of the function
L (x) = (∇f (p)) · (x− p) + f (p) .
This definition is abstract: it does not tell us how to find the matrix ∇f (p). We will describe how to find the
derivative in the next two sections. First we will look at functions of 1 variable, then we will look at functions of
many variables.
Nick Sharples ©2016 Middlesex University 21

3.2 Functions of 1 variable f : R→ Rn
Finding the derivative of vector valued functions of 1 variable is straightforward, thanks to the following theorem:
Theorem 3.6:
A function f : R → Rn is differentiable at t ∈ R iff each component fi : R → R is differentiable at t ∈ R.Further, the derivative of f at t is the n × 1 matrix
∇f (t) =
df1dt (t)
df2dt (t)
...
dfndt (t)
.
Proof.P
So, to differentiate a vector function of 1 variable we simply differentiate each component separately.
Nick Sharples ©2016 Middlesex University 22

Example 3.7.
P Let f : R→ R4 be defined by
f (t) =
t2
cos (t)
et
t3 + 4t + sin (t) + t−1
The derivative of f at the point t ∈ R is
The vector ∇f (t) ∈ Rn describes the direction and rate of change of the function f at the point t . We will also
use the notation
f ′ (t) = ∇f (t) =
df1dt (t)
df2dt (t)
...
dfndt (t)
where f is differentiable at t ∈ R.
If f : R → Rn is differentiable at all t ∈ R then the derivative itself is a function f ′ : R → Rn. Higher order
derivatives, such as f ′′, can now be defined as the derivative of the function f ′ : R→ Rn. Again, from Theorem 3.6
this just means we differentiate each component separately, so
f ′′ (t) =
d2f1dt2 (t)
d2f2dt2 (t)
...
d2fndt2 (t)
.
Nick Sharples ©2016 Middlesex University 23

Some derivatives have a physical significance. For example, if f : R → R3 represents the position of an object
in space as a function of time, then the first derivative f ′ (t) ∈ R3 is the velocity of the object and the second
derivative f ′′ (t) ∈ R3 is the acceleration of the object.
Example 3.8.
P The position of a car at time t is given by the function
f : R+ → R2
f (t) =
t cos (t)t sin (t)
• Sketch the car’s journey.
−2π −π π 2π
−2π
−π
π
2π
• What is the velocity of the car at the times t = 1, t = π and t = 7π4 ?
• Add these velocity vectors to your sketch.
• What is the acceleration of the car at the times t = 1, t = π and t = 7π4 ?
• Add these acceleration vectors to your sketch.
Nick Sharples ©2016 Middlesex University 24

3.3 Functions of many variables f : Rm → Rn
3.3.1 Directional Derivatives
A directional derivative is a weaker notion of derivative that is easier to calculate using our knowledge of calculus
in 1 dimension. Let f : Rm → Rn be a function and h ∈ Rm be a vector. The directional derivative is the rate of
change of f in the direction of h.
Definition 3.9: Directional derivative
Let f : Rm → Rn be a function and let h ∈ Rm be a vector with unit length. The directional derivative
∇hf (p) of the function f in the direction h at the point p ∈ Rm is
∇hf (p) = limt→0
f (p+ th)− f (p)t
(3.2)
if the limit (3.2) exists.
Note that ∇hf (p) ∈ Rn. The directional derivative (3.2) is a straightforward limit of t ∈ R. In fact ∇hf (p) is just a
derivative of a function of 1 variable:
Lemma 3.10:
Premise
Let f : Rm → Rn, fix a unit length vector h ∈ Rm and a point p ∈ Rm.
Conclusion
The directional derivative of the function f in the direction h at the point p exists if and only if the function
g : R→ Rn
t 7→ f (p+ th)
is differentiable at t = 0.
Further, if the directional derivative exists then
g′ (0) = ∇h (p) .
Proof.P
Nick Sharples ©2016 Middlesex University 25

Example 3.11.
P Let f : R2 → R be defined by f (x, y) = x2 + y2.
• What is the directional derivative of f in the direction h = ( 10 ) at the point p = ( 12 )?
• What about in the direction h =(1/√2
1/√2
)?
• What about in an arbitrary direction h?
Example 3.12.
P Let f : R2 → R2 be defined by
f (x, y) =
x3 − y2cos (x)
.
• What is the directional derivative of f in the direction h =(1/√2
1/√2
)at the point p = ( 23 )?
• What about in an arbitrary direction h?
Nick Sharples ©2016 Middlesex University 26

• What about in an arbitrary direction h at an arbitrary point p?
Differentiability and directional derivatives
If f is differentiable then we can recover the directional derivative of f from the derivative of f :
Lemma 3.13:
Premise
If the function f : Rm → Rn is differentiable at p then
Conclusion
• the directional derivative ∇hf exists for each unit length h ∈ Rm, and
• ∇hf (p) = ∇f (p)h.
Proof.P
Nick Sharples ©2016 Middlesex University 27

However, the following important example shows us that the converse of Lemma 3.13 doesn’t hold. This means
that there are functions for which every directional derivative exists, but the function itself is not differentiable.
Example 3.14.
P Let f : R2 → R be defined by
f (x, y) =
x3
x2+y2 x2 + y2 6= 00 x2 + y2 = 0.
Then all the directional derivatives of f at the origin exist, but f is not differentiable at the origin.
Nick Sharples ©2016 Middlesex University 28

Fortunately, we can check that a function is differentiable by examining its partial derivatives, which you should be
familiar with from MSO1120 - Calculus and Differential Equations.
3.3.2 Partial derivatives
Recall that the set of vectors e1, . . . , em is the canonical basis of Rm. These m ‘special’ directions give rise to m
‘special’ directional derivatives of a function f : Rm → R.
Definition 3.15: Partial derivatives
Let f : Rm → R be a function. The i th partial derivative of f at the point p, denoted ∂f∂xi (p), is the directional
derivative of f in the direction ei at the point p, i.e
∂f
∂xi(p) := ∇ei f (p) .
In MSO1120 Calculus and Differential Equations the partial derivative ∂f∂xi
was defined as the derivative of f with
respect to xi assuming that all other variables are constant. We have now put this on a formal footing.
Now, we would like to use the partial derivatives as basis elements to construct the ‘abstract’ matrix ∇f fromDefinition 3.3.
Example 3.16. The function f : R2 → R defined by f (x, y) = x2 + y3 has partial derivatives
∂f
∂x= 2x
∂f
∂y= 3y2
so if f is differentiable then, from Lemma 3.13, the 1× 2 matrix ∇f (x, y) must satisfy
2x =∂f
∂x(x, y) := ∇(
10
)f (x, y) = ∇f (x, y) ( 10 )
and
3y2 =∂f
∂y(x, y) := ∇(
01
)f (x, y) = ∇f (x, y) ( 01 ) .
Consequently, if f is differentiable at the point ( xy ) then the derivative is precisely the matrix
∇f (x, y) =(2x 3y2
).
In general this argument shows that if the derivative ∇f exists then it is given by the matrix of partial derivatives.
But recall from Example 3.14 the existence of these partial derivatives is not sufficient.
However, if the partial derivatives exist and are continuous at p then f is differentiable:
Nick Sharples ©2016 Middlesex University 29

Theorem 3.17:
Premise
Let f : Rm → Rn be a function and p ∈ Rm be a point. If for each i = 1, . . . , m and j = 1, . . . , n and the
partial derivatives ∂fi∂xj exists and is continuous at p then
Conclusion
f is differentiable at p and its derivative is the matrix
∇f (p) =
∂f1∂x1(p) ∂f1
∂x2(p) . . . ∂f1
∂xm(p)
∂f2∂x1(p) ∂f2
∂x2(p) . . . ∂f2
∂xm(p)
......
. . ....
∂fn∂x1(p) ∂fn
∂x2(p) . . . ∂fn
∂xm(p)
.
Proof.P
Most of the functions we will consider in this part of the course will have continuous partial derivatives.
Nick Sharples ©2016 Middlesex University 30

Example 3.18.
P Is the function f : R2 → R3 defined by
f (x, y) =
x2 + cos (y)
xy + cos (xy)
y ex
differentiable at the point p = ( 10 )? If so, what is the derivative at this point?
3.4 Differentiation rules
We now establish the important properties of differentiation which makes calculating derivatives of complicated
functions easier.
Differentiation is linear:
Theorem 3.19:
Premise
Let λ, µ ∈ R. If f : Rm → Rn and g : Rm → Rn are differentiable at the point p ∈ Rm then
Conclusion
the function λf + µg : Rm → Rn is differentiable at p and
∇ (λf + µg) (p) = λ∇f (p) + µ∇g (p) .
Proof.P
Nick Sharples ©2016 Middlesex University 31

3.4.1 Product rules
Scalar products:
Theorem 3.20:
Premise
If f : Rm → Rn and g : Rm → R are differentiable at the point p ∈ Rm then
Conclusion
the function gf : Rm → Rn is differentiable at p ∈ Rm and
∇ (gf) (p) = g (p)∇f (p) + f (p) · ∇g (p)
Proof.P
Nick Sharples ©2016 Middlesex University 32

Dot products:
Theorem 3.21:
Premise
If f : Rm → Rn and g : Rm → Rn are differentiable at the point p ∈ Rm then
Conclusion
the function f · g : Rm → R is differentiable at p and
∇ (f · g) (p) = f (p)T · ∇g (p) + g (p)T · ∇f (p)
Proof.P
Nick Sharples ©2016 Middlesex University 33

3.4.2 Chain rule
Theorem 3.22:
Premise
Let f : Rm → Rn and g : Rk → Rm. If g is differentiable at p ∈ Rk and f is differentiable at g (p) ∈ Rm then
Conclusion
the composition f g : Rk → Rn is differentiable at p and
∇ (f g) (p) = ∇f (g (p)) · ∇g (p) (3.3)
Proof.P
Nick Sharples ©2016 Middlesex University 34

Example 3.23.
P
Note that (3.3) is a more compact way of writing the chain rule from MSO1120 Calculus and Differential Equations
(§5.5 of MSO1120 notes). To illustrate
Example 3.24.
P If f : R2 → R and h : R→ R2 then (3.3) is simply
d
dt(f h) (t) =
∂f
∂x
∣∣∣∣h(t)
+∂f
∂y
∣∣∣∣h(t)
.
Nick Sharples ©2016 Middlesex University 35

3.5 Important cases
Now that we have developed some general theory of differentiation, we will look at two important cases:
3.5.1 Scalar functions
The derivative of a scalar function f : Rm → R is the 1×m matrix
∇f (p) =(∂f∂x1
. . . ∂f∂xm.
)If f is differentiable then this derivative defines a vector field ∇f : Rm → Rm, which is often referred to as the
gradient of f .
We can plot both the function and the gradient on a single graph:
−20
2 −20
20
5
10f (x, y) = x2 + y2
∇f (x, y) = ( 2x 2y )
Properties of the gradient
The gradient is orthogonal to the level sets of f .
3
3
3 3
3
3
3
2
2
2
2
2
1
1
1
1
0.5 0.5
0.5
−2 −1 0 1 2−2
−1
0
1
2
Function f (x, y) = x2 + y2
Level sets f (x, y) = c
Gradient ∇f (x, y) = ( 2x 2y )
More precisely:
Nick Sharples ©2016 Middlesex University 36

Lemma 3.25:
Premise
Let f : Rm → R be differentiable at p ∈ Rm.
Conclusion
The gradient ∇f (p) is orthogonal to the level set x ∈ Rm|f (x) = f (p) at the point p.
Proof.P
As the gradient ‘points away’ from the level set, where the function is constant, the gradient tells us which direction
to move in order to get the greatest increase in the function.
Lemma 3.26:
Premise
Let f : Rm → R be differentiable at p ∈ Rm.
Conclusion
The gradient ∇f (p) is the direction of greatest increase, that is
maxu∈Rm ||u|=1
∇uf (p) = ∇v f (p)
for
v =∇f (p)|∇f (p)| .
Proof.P
Nick Sharples ©2016 Middlesex University 37

Example 3.27.
P
3.5.2 Scalar functions: Higher order derivatives
Let f : Rm → R be a scalar function. If the partial derivative ∂f∂xi(p) exists for all points p ∈ Rm then the partial
derivative defines a scalar function∂f
∂xi: Rm → R.
The partial derivatives of this function define the second order partial derivatives of f :
Definition 3.28. The second order partial derivative ∂2f∂xj∂xi
(p) of the function f at the point p ∈ Rm is defined by
∂2f
∂xj∂xi=
∂
∂xj
(∂f
∂xi
).
We will also write
∂2f
∂x2i:=
∂2f
∂xi∂xi.
Higher order partial derivatives (e.g. ∂3f∂x1∂x22
) are defined by repeating this process.
How do these partial derivatives fit into the ‘abstract’ definition of differentiation of Section 3.1? Recall that we
defined the derivative ∇f by looking for the best linear approximation L (x) = A · x + b of f at the point p. It
turned out that if this derivative existed then it was given by a matrix of the (first order) partial derivatives of f .
We could instead look for the best quadratic approximation of f . A quadratic map Q : Rm → R has the form
Q (x) = xT ·M · x+ A · x+ b
where M is a m ×m matrix, A is a 1×m matrix, and b ∈ R. The best quadratic approximation to f at the point p
should have
limh→0
|Q (p+ h)− f (p+ h)||h|2
= 0.
In a similar way to the linear case it turns out that if this quadratic approximation exists then
Q (x) = f (p) +∇f (p) · (x− p) +1
2(x− p)T Hess f (p) (x− p)
Nick Sharples ©2016 Middlesex University 38

where the Hessian of f at the point p ∈ Rm is the m ×m matrix of partial derivatives:
Hess f =
∂2f∂x1∂x1
∂2f∂x1∂x2
. . . ∂2f∂x1∂xm
∂2f∂x2∂x1
∂2f∂x2∂x2
. . . ∂2f∂x2∂xm
......
. . ....
∂2f∂xm∂x1
∂2f∂xm∂x2
. . . ∂2f∂xm∂xm
i.e. the matrix whose (i , j)th entry is the partial derivative ∂2f∂xi∂xj
.
Similarly to the relationship between first order partial derivatives and the linear approximation:
• the existence of the second order partial derivatives doesn’t guarantee that the quadratic approximation
exists,
• but if the second order partial derivatives exist and are continuous then the quadratic approximation exists.
Repeating this process for the best cubic approximation, quartic approximation, and so on, gives us the multivariable
Taylor series for f at the point p.
There are a lot of second order partial derivatives, so writing derivatives as matrices really tidies up the notation.
The partial derivatives for m = 2, 3 are the following:
m first order partial derivatives second order partial derivatives
2 ∂f∂x ,
∂f∂y
∂2f∂x2 ,
∂2f∂x∂y ,
∂2f∂y∂x ,
∂2f∂y2
3 ∂f∂x ,
∂f∂y ,
∂f∂z
∂2f∂x2 ,
∂2f∂x∂y ,
∂2f∂x∂z ,
∂2f∂y∂x ,
∂2f∂y2 ,
∂2f∂y∂z ,
∂2f∂z∂x ,
∂2f∂z∂y ,
∂2f∂z2
So there are 4 second order partial derivatives when m = 2 and 9 second order partial derivatives when m = 3. In
practice we don’t have to calculate all of these due to the following symmetry:
Theorem 3.29: Symmetry of second derivatives
Premise
Let f : Rm → R be a function and p ∈ Rm be a point. If all second order partial derivatives of f exist and
are continuous at p then
Conclusion
∂2f
∂xi∂xj(p) =
∂2f
∂xj∂xi(p) .
We will prove this as a consequence of the powerful Green’s Theorem later in the course.
Nick Sharples ©2016 Middlesex University 39

Application of the Hessian: optimisation
We can use the gradient and the Hessian to find and classify stationary points of functions f : Rm → R:
Definition 3.30:
A point p ∈ Rm is a stationary point of f if ∇f (p) = 0.
We can classify stationary points by looking at the eigenvalues of the Hessian (which is a matrix).
Theorem 3.31:
Premise
Let f : Rm → R be a function. Let p ∈ Rm be a stationary point of f : Rm → R. If the matrix Hess f (p)
exists and is invertible then
Conclusion
• if the eigenvalues of Hess f (p) are all positive then p is a local minimum,
• if the eigenvalues of Hess f (p) are all negative then p is a local maximum,
• if there are positive and negative eigenvalues of Hess f (p) then p is a saddle point.
Proof.P
Nick Sharples ©2016 Middlesex University 40

Example 3.32.
P
Nick Sharples ©2016 Middlesex University 41

3.5.3 Vector fields
Recall that a vector field is a vector valued map f : Rm → Rm, so the domain and codomain have the same
dimension.
Vector fields can be graphed as arrows in Rm (at least for m = 2 and m = 3).
Example 3.33. Three vector fields from R2 to R2.
−2 −1 0 1 2−2
−1
0
1
2
f (x, y) = ( xy )
−2 −1 0 1 2−2
−1
0
1
2
g (x, y) = ( x−y )
−2 −1 0 1 2−2
−1
0
1
2
h (x, y) =(y−x
)
If a vector field has partial derivatives then we can define the divergence of the vector field, which is a measure
of how much the vector field is ‘expanding’:
Definition 3.34: Divergence
Suppose the vector field f : Rm → Rm has partial derivatives at the point p ∈ Rm. The divergence of f at p,
denoted ∇ · f (p), is defined by
∇ · f =m∑i=1
∂fi∂xi(p) .
Nick Sharples ©2016 Middlesex University 42

The notation ∇ · f helps us remember this definition: we take the dot product of f with the ‘vector’
∇ =
∂∂x1
...
∂∂xm
.
The divergence measures how much the vector field is ‘expanding’ at the point p:
Example 3.35.
P The vector fields in Example 3.33 have divergence
In the special case m = 3 we can define the curl of a vector field, which is a measure of how much the vector field
rotates at a point p.
Definition 3.36: Curl
Suppose the vector field f : R3 → R3 has partial derivatives at the point p ∈ R3. The curl of f at the point
p, denoted ∇× f (p), is defined by
∇× f =
∂f3∂y −
∂f2∂z
∂f1∂z −
∂f3∂x
∂f2∂x −
∂f1∂y
.
Again, the notation provides a hint: we take the cross product of f with the ‘vector’
∇ =
∂∂x1
...
∂∂xm
.
Nick Sharples ©2016 Middlesex University 43

Example 3.37.
P The vector field f : R3 → R3 defined by
f (x, y , z) =
y
−x
z
has curl
The curl can be interpreted geometrically: the direction of the vector gives the axis of rotation and the magnitude
of the vector gives (half) its angular velocity.
We can extend the curl to vector fields f : R2 → R2 in the same way that we extend the cross product (defined in
R3) to R2:
Let f : R2 → R2 be a vector field whose partial derivatives are defined at the point p ∈ R2. Let f : R3 → R3 be the
vector field defined by
f (x, y , z) =
f1 (x, y)
f2 (x, y)
0
.
We say that f is the embedding of f into R3. Taking the curl of f at the point
p =
p1
p2
0
we obtain the vector
∇× f (p) =
0
0
∂f2∂x (p)−
∂f1∂y (p)
where the only non-zero component is the last. We abuse notation to say that the curl of f : R2 → R2 is this lastcomponent, so
∇× f (p) =∂f2∂x(p)−
∂f1∂y(p) .
Nick Sharples ©2016 Middlesex University 44

Example 3.38.
P The vector fields in Example 3.33 have curl
Nick Sharples ©2016 Middlesex University 45

Nick Sharples ©2016 Middlesex University 46

Chapter 4
Integration along curves
For a continuous function f : R→ R the familiar integral∫ b
a
f (x) dx
can be thought of as integrating over a one-dimensional set [a, b] in R. The main goal of this chapter is to develop
integration for one-dimensional subsets of higher dimensions Rm. This will require some care and mathematical
rigour as these sets, which we will call ‘curves’, can have all kinds of weird and wonderful shapes and properties.
In the first section we explore curves in Rm.
4.1 Paths and Curves
It is important to distinguish between the curve itself (which is a subset of Rm) and the function f : R→ Rm that
describes it.
However not every subset of Rm is a curve. The strategy is as follows:
• We will define a special class of functions p : R→ Rm, called paths.
• The points in the image of the path p trace out some subset of Rm. This is called the trace of the path p.
• We define a curve to be a set that is the trace of some path.
Now let’s enact this strategy formally: A path is a continuous function from one dimension to many dimensions.
Definition 4.1: Path
A path is a continuous function p : I → Rm where I ⊂ R is some interval.
Definition 4.2: Trace
The trace of a path p : I → Rm is the set
tr (p) = x ∈ Rm|x = p (t) for some t ∈ I .
Definition 4.3: Curve
A set C ⊂ Rm is a curve if it is the trace of some path.
47

Example 4.4.
P
Note that a curve exists in an absolute sense - a curve is just some subset of Rm (with the property that it can be
written as the trace of some path).
Typically a curve is described without us explicitly being given a path. For example:
• the triangle with vertices (0, 0) , (2, 3) , (0, 4)
• the graph of f (x) = x2 from x = −1 to x = 2
• the line between the local maxima and local minima of the function f (x) = x3 − 4x2 + 3x − 1
all describe curves in R2 (can you find a path for these curves?).
In fact, there are infinitely many paths that describe each curve:
Example 4.5. Let C =(x, y) ∈ R2|x2 + y2 = 1
. C is a curve. In fact, C is the trace of each of the following paths:
p : [0, 2π]→ R2 p (t) = (sin (t) , cos (t))T
q : [0, 1]→ R2 r (t) = (sin (2πt) , cos (2πt))T
sλ : R→ R2 sλ (t) = (sin (λt) , cos (λt))T for each fixed λ > 0.
fl : [0, 2]→ R2 fl (t) =
(t,√1− t2
)T0 ≤ t ≤ 1(
2− t,−√1− (2− t)2
)T1 < t ≤ 2
Nick Sharples ©2016 Middlesex University 48

This non-uniqueness means that we must be careful when we use paths to do mathematical constructions on a
curve. If the construction depends upon the choice of path that describes the curve then the construction is not
well-defined.
There are three important properties that paths may have:
Definition 4.6: Closed path
A path p : [a, b]→ Rm is closed if p (a) = p (b).
Definition 4.7: Simple path
A path p : [a, b]→ Rm is simple if
• p is injective, or
• p is closed and injective on [a, b).
Definition 4.8: Piecewise continuously differentiable path
A path p : [a, b] → Rm is piecewise continuously differentiable if there exists a finite number of nodes
x0, . . . , xn with
• x0 = a
• xn = b, and
• xi < xi+1 for all i = 0, . . . n − 1
such that p is continuously differentiable on the interval (xi , xi+1) for all i = 0, . . . n − 1.
Important note:
All of the paths considered in this part of the course will be piecewise continuously differentiable.a
aA more general theory can be developed that only requires paths to have ‘finite length’ and the more general Riemann integrationis used. This could be an interesting project for MSO3140.
These definitions are properties of paths. We can also apply them to curves:
Definition 4.9:
A curve C ⊂ Rm is closed/simple/piecewise continuously differentiable if there exists a closed/sim-
ple/piecewise continuously differentiable path p with tr (p) = C.
We are so used to dealing with piecewise differentiable functions that it can be difficult to believe that there are
continuous functions that are not piecewise differentiable. Here is an example of one:
Nick Sharples ©2016 Middlesex University 49

Example 4.10. The Weierstrass function w : R→ R
w (t) =
∞∑n=0
2−n cos (13nπt)
with graph
−0.4 −0.2 0.2 0.4
0.5
1
1.5
2
is continuous but differentiable nowhere (it is not straightforward to prove this, and this is beyond the scope of the
course).
The curve defined by (t, w (t)) |t ∈ [0, 1] is not piecewise differentiable.
Simple closed curves in R2 have some special properties, thanks to the following theorem:
Theorem 4.11: Jordan Curve Theorem
Premise
Let C be a simple closed curve in R2.
Conclusion
The complement of the curve C, (i.e the set R2 \ C) consists of exactly two connected components.
• One component is bounded,
• the other component is unbounded,
• the curve C is the boundary of each component.
For a proof see, for example, Theorem 21.3.1 of Garling1.
The bounded component is called the interior of the curve, and the unbounded component is called the exterior
of the curve.
The Jordan Curve Theorem induces a canonical orientation to simple closed curves in R2. A path p : I → R2 with
tr (p) = C is positively oriented if the interior of the curve is always to the left when travelling along the path.
1D.J.H. Garling - A course in mathematical analysis Vol. III
Nick Sharples ©2016 Middlesex University 50

4.2 Motivating idea: integrating functions f : R→ R
Recall how we integrate a continuous function f : R→ R over an interval [a, b]:
a xi b0
f
δxi
f : R→ R
We would like the integral of f over the interval [a, b] to measure the area between [a, b] and the graph of f .
Suppose we chop [a, b] into sub-intervals. For each sub-interval let xi ∈ [a, b] be a point in the sub-interval and let
δxi be the length of the sub-interval.
The ‘area’ over the subinterval with height give by f is f (xi) δxi . Summing over all of these sub-intervals we get∑i
f (xi) δxi
which should give an approximation to the integral of f over [a, b]. Taking the limit as the subinterval length
decreases we define ∫ b
a
f (x) dx := limδx→0
∑i
f (xi) δxi .
This is an imprecise heuristic approach to integration. To make a mathematically precise definition we have to
worry about
• whether the limit converges, and
• whether a different choice of subintervals or points xi gives a different result.
The formal definition of Riemann integration, which deals with these details, was discussed in MSO1120 Calculus
and Differential Equations and MSO2120 Mathematical Analysis.
In the following chapters we will follow this pattern to define new notions of integration:
1) give an imprecise heuristic approach,
2) give a formal definition.
The formal definition is mathematically precise, but the heuristic approach explains how we arrived at the formal
definition.
Nick Sharples ©2016 Middlesex University 51

4.3 Integrating scalar functions f : Rm → R
First we consider integrating a scalar function f over a simple curve C ⊂ Rm.
4.3.1 Integration of scalar functions: heuristic approach
Suppose C ⊂ R2 is some simple continuously differentiable curve, say this one:
C
Now, given some scalar function f : R2 → R we can look at the graph of f restricted to C.
C
f (C)
The function f over C The area between C and the graph of f
We would like the integral of f along the curve C to measure the area between C and the graph of f . Following
the approach we used at the start of the chapter:
Suppose we can chop the curve into ‘arcs’ like this:
Nick Sharples ©2016 Middlesex University 52

C
C chopped into arcs
For each arc let pi ∈ C be a point in the arc and let δri be the ‘length’ of the arc. So f (pi) δri gives the ‘area’ over
the arc with height given by f . Summing the ‘areas’ over every arc∑i
f (pi) δri
should give an approximation to the integral of f over C. Taking the limit as the arc size decreases we define∫C
f dr := limδr→0
∑i
f (pi) δri (4.1)
To put this on a formal footing we need two things:
• a way of splitting up C into ‘arcs’,
• a way of measuring the lengths δri .
Both of these are provided by finding a path p with trace tr (p) = C.
Let p : [a, b]→ Rm be a simple continuously differentiable path with tr (p) = C. Split [a, b] into intervals of length
δt and consider one of these intervals [ti , ti + δt]. By mapping this interval forward under the map p we get an
arc p ([ti , ti + δt]) of the curve C that contains the point p (ti).
So what is the length δri of the arc p ([ti , ti + δt])? We don’t (yet) have a way of calculating arc lengths. However,
it is approximately
|p (t + δt)− p (t)| .This can further be approximated by using the derivative of p as p is differentiable. As
p (t + δt)− p (t) ≈ δtp′ (t)
the length δri of the arc p ([ti , ti + δt]) is approximately
δri ≈ δt |p′ (t)|
Substituting into (4.1) we obtain ∫C
f dr = limδr→0
∑i
f (pi) |p′ (ti)| δt.
The choice of representative point pi = p (ti) gives
= limδr→0
∑i
f (p (ti)) |p′ (ti)| δt
Nick Sharples ©2016 Middlesex University 53

as δt → 0 implies δri → 0
= limδt→0
∑i
f (p (ti)) |p′ (ti)| δt
which is exactly the integral
=
∫ b
a
f (p (t)) |p′ (t)| dt. (4.2)
Now, we know that the integral (4.2) is well defined, and we know how to calculate it as it is a standard one
dimensional integral of the continuous function
g : [a, b]→ Rt 7→ f (p (t)) |p′ (t)| .
In conclusion, our heuristic approach suggests that a sensible way of defining the integral∫C f dr is by the perfectly
well defined, familiar integral (4.2).
Let’s make the formal definition:
4.3.2 Integration of scalar functions: formal definition
Definition 4.12: Line integral
Let C ⊂ Rm be a simple piecewise continuously differentiable curve. Let f : Rm → R be continuous on C.
The line integral of f along C is ∫C
f dr :=
∫ b
a
f (p (t)) |p′ (t)| dt
where p : [a, b]→ Rm is any simple piecewise continuously differentiable path with tr (p) = C.
Example 4.13.
P
Nick Sharples ©2016 Middlesex University 54

Example 4.14.
P
Remember that for any curve C ⊂ Rm there are many different paths whose trace is C (see Example 4.5). In order
for Definition 4.12 to be well defined we need the integral to have the same value regardless of the choice of path.
We saw an example of this in Example 4.14 but we must prove this for the general case.
Theorem 4.15:
LetC ⊂ Rm be a simple, piecewise differentiable curve. Let f : Rm → R be continuous onC. Let p : [a, b]→Rm and q : [c, d ]→ Rm be simple, piecewise differentiable paths such that
tr (p) = tr (q) = C ⊂ Rm.
Then ∫ ba
f (p (t)) |p′ (t)| dt =∫ d
c
f (q (s)) |q′ (s)| ds
Proof.P
Nick Sharples ©2016 Middlesex University 55

Properties of line integrals
Theorem 4.16:
Premise
Let C and D be simple piecewise continuously differentiable paths such that their union C ∪D is a simple
path. Let f , g : Rm → R be continuous on both C and D. Let α ∈ R be a constant.
Conclusion
Then
i) ∫C
f + g dr =
∫C
f dr +
∫C
dr
ii) ∫C
αf dr = α
∫C
f dr
iii) ∫C∪D
f dr =
∫C
f dr +
∫D
f dr
Proof.P
Nick Sharples ©2016 Middlesex University 56

Notation: closed curves
If a simple, piecewise continuously differentiable curve C is closed then we write the integral with a little circle,
like so: ∮C
f dr.
These curves have some very important properties in Calculus, which you will really appreciate in the Complex
Analysis portion of this module.
4.3.3 Arc length
Integration over curves gives a straightforward way of defining the length of a curve. By integrating the constant
function f ≡ 1 along a curve C we obtain the arc length of C.
C
Some curve C
C
1
The function f ≡ 1 over the curve C
Definition 4.17: Arc length
If C ⊂ Rm is a piecewise continuously differentiable curve then the arc length of C is
length (C) :=
∫C
1 dr.
Example 4.18.
P Let C ⊂ R2 be the unit circle around the origin. What is the length of the circumference of C?
Nick Sharples ©2016 Middlesex University 57

4.4 Integrating vector fields v : Rm → Rm
Now we consider integrating a vector field v : Rm → Rm over a curve C ⊂ Rm.
4.4.1 Integration of vector fields: heuristic approach
Suppose C ⊂ R2 is some simple continuously differentiable curve, say this one:
C
Now, given a vector field v : R2 → R2 we can look at the vector field v restricted to C:
C
We want the integral of v along C to measure how much the vector field v ‘points’ in the same direction as the
curve C. To illustrate:
Nick Sharples ©2016 Middlesex University 58

C
A vector field that ‘points along’ C
C
A vector field that doesn’t ‘point along’ C
What exactly do we mean by ‘pointing in the same direction as C’? Consider a point p ∈ C and a unit tangent
T (p) to the curve at the point p.
The tangent T (p) exists as C is differentiable, and describes the direction of C at the point p. Consequently we
want to know how much the vectors v (p) and T (p) ‘point in the same direction’. We saw in Section 1.3.1 that
this is quantified exactly by the dot product: v (p) · T (p).
Note that we insist T (p) is a unit vector (i.e. |T| = 1) so that the contributions from all points of C are treated
equally.
Consequently, a reasonable definition of the integral of the vector field v along C is
∫C
v · T dr
where T (p) is a unit tangent to the curve C at the point p. However, there are two unit vectors tangent to C,
pointing in opposite directions
C
p
Two tangents at p ∈ C
so we must specify which unit tangent we will use. Consequently, we make the following definition:
Nick Sharples ©2016 Middlesex University 59

Definition 4.19:
Let C ⊂ Rm be a simple, continuously differentiable curve, let v : C → R3 be a continuous vector field, and
let r be a vector tangent to C. The integral of v along C in the direction r is∫C
v · dr =∫C
v · T dr
where T is the unit vector with the same orientation as r.
The dot product v ·T : C → Rm is just a continuous scalar function, which we know how to integrate from Definition
4.12. From this definition we see that∫C
v · dr =∫C
v · T dr =∫ ba
v (p (t)) · T (p (t)) |p′ (t)| dt (4.3)
where p : [a, b]→ Rm is any path with tr (p) = C.
Finding T
Fortunately, we can tidy up equation (4.3) by differentiating p to find a tangent vector: the vector p′ (t) is tangentto C at the point p (t), so the vector
p′ (t)
|p′ (t)|is a unit tangent vector at the point p (t). Consequently, the unit tangent vector T must either be
T (p (t)) =p′ (t)
|p′ (t)|
if p′ is in the same direction as T, or
T (p (t)) = −p′ (t)
|p′ (t)|
if p′ is in the opposite direction to T.
Consequently, either ∫C
v · dr =∫ ba
v (p (t)) · p′ (t) dt
or ∫C
v · dr = −∫ b
a
v (p (t)) · p′ (t) dt.
So to evaluate the integral∫C v · dr:
1) Find a path p : [a, b]→ Rm with trace tr (p) = C
2) If p points in the same direction as the specified r, then∫C
v · T dr =∫ ba
v (p (t)) · p′ (t) dt
3) If p point in the opposite direction as the specified r, then∫C
v · T dr = −∫ b
a
v (p (t)) · p′ (t) dt.
Nick Sharples ©2016 Middlesex University 60

Important note:
Unlike integrating scalar functions (Section 4.3) the direction of the path p affects the integral.
Example 4.20.
P
Example 4.21.
P
Simple closed curves in R2
If C ⊂ R2 is a simple closed curve then the Jordan Curve Theorem 4.11 gives a canonical direction: we agree that
the integral is performed in an anti-clockwise direction (with the interior on the left).
Example 4.22.
P
Nick Sharples ©2016 Middlesex University 61

4.4.2 Fundamental Theorem of Calculus I: The Gradient Theorem
The process of finding a path that describes our curve then using this path to evaluate an integral is reasonably
time consuming. Fortunately, for certain vector fields v we can find the integral∫C v · dr simply by knowing the
endpoints of the curve C.
Theorem 4.23: Fundamental Theorem of Calculus I: The Gradient Theorem
Premise
Suppose f : Rm → R is differentiable on an open neighbourhood U ⊂ Rm. Let x, y be points in U and let
C ⊂ U be a simple piecewise continuously differentiable curve from the point x to the point y. Then
Conclusion
f (y)− f (x) =∫C
∇f · dr
Proof.P
Nick Sharples ©2016 Middlesex University 62

Example 4.24.
P
The theorem is very powerful as the left-hand side depends only on the endpoints of the curve C and not the curve
itself.
Example 4.25.
P
Corollary 4.26:
Premise
Let C ⊂ Rm be a closed simple piecewise continuously differentiable curve. Let v : Rm → Rm. If v = ∇ffor some f : Rm → R then
Conclusion ∮C
v · dr = 0.
Proof.P
Nick Sharples ©2016 Middlesex University 63

Example 4.27.
P
Example 4.28.
P
Nick Sharples ©2016 Middlesex University 64

Chapter 5
Integrating over surfaces
5.1 Flat space
We recall from MSO1120 Calculus and Differential Equations how to integrate functions f : R2 → R2 over some
region Ω ⊂ R2.
Let f : R2 → R be a continuous function, for example f (x, y) = x2 − y2 + 8, and let Ω ⊂ R2 be a region, forexample the unit disc centred on the origin.
−2 −10
12−2
0
2
0
5
10
Ω
f : R2 → R
−2 −1 0 1 2−2
−1
0
1
2
Ω
Bi
(xi , yi)
The unit disc Ω
Split Ω into boxes of side length δx and δy . For each box Bi evaluate f at some point (xi , yi) ∈ Bi . The quantity∑i
f (xi , yi) δxδy
is an estimate of the area volume between Ω and the graph of f . By letting δx and δy go to zero we obtain the
volume. We define ∫∫Ω
f dx dy := limδx→0
limδy→0
∑i
f (xi , yi) δxδy .
In practice we don’t evaluate these double integrals directly. Instead write them as the two nested 1-dimensional
integrals ∫∫Ω
f dx dy =
∫R
(∫y∈R|(x,y)∈Ω
f (x, y) dy
)dx (5.1)
65

which we can evaluate using our knowledge of 1-dimensional integrals. The equality (5.1) is a result of Fubini’s
Theorem, which we will look at in a very general setting in the next part of this module.
In MSO1120 Calculus and Differential Equations you evaluated the integral (5.1) for ‘simple’ regions Ω.
Example 5.1.
P
Example 5.2.
P
Nick Sharples ©2016 Middlesex University 66

5.1.1 Fundamental Theorem of Calculus II: Green’s Theorem
So far we have integrated over ‘simple’ regions Ω. Unfortunately, this method is difficult to apply for more compli-
cated regions Ω. However, for certain functions f we can find the integral∫∫Ω f dx dy by instead calculating a line
integral along the boundary of Ω.
Theorem 5.3: Fundamental Theorem of Calculus II: Green’s Theorem
Premise
Let C ⊂ R2, piecewise differentiable, simple closed curve. Let Ω be the region bounded by C. If the vector
function v : R2 → R2 is continuously differentiable on an open set U ⊂ R2 with Ω ⊂ U then
Conclusion ∮C
v · dr =∫∫Ω
(∂v2∂x−∂v1∂y
)dx dy
where C is parametrised anticlockwise.
Proof.P
Nick Sharples ©2016 Middlesex University 67

Example 5.4.
P
Corollary 5.5: Symmetry of second derivatives
Premise
If f : R2 → R is twice continuously differentiable then
Conclusion
∂2f
∂x∂y=
∂2f
∂y∂x.
Proof. Suppose f : R2 → R is a twice differentiable function. Let Ω ⊂ R2 be a disc and let C be the boundary of
Ω. Writing v = ∇f we have
0 =
∮C
v · dr
from Corollary 4.26. Applying Green’s Theorem we obtain
=
∫∫Ω
(∂v2∂x−∂v1∂y
)dx dy
=
∫∫Ω
∂
∂x
(∂f
∂y
)−
∂
∂y
(∂f
∂x
)dx dy
=
∫∫Ω
∂2f
∂x∂y−
∂2f
∂y∂xdx dy . (5.2)
Now suppose for a contradiction that∂2f
∂x∂y(a) >
∂2f
∂y∂x(a)
for some a ∈ R2, so∂2f
∂x∂y(a)−
∂2f
∂y∂x(a) > c > 0
for some constant c > 0. As ∂2f∂x∂y and ∂2f
∂y∂x are both continuous (by assumption) it follows that there is a small
neighbourhood Bε (a) =b ∈ R2| |b− a| < ε
such that
∂2f
∂x∂y(b)−
∂2f
∂y∂x(b) > c
Nick Sharples ©2016 Middlesex University 68

for all b ∈ Bε (a). Consequently
∫∫Bε(a)
∂2f
∂x∂y(b)−
∂2f
∂y∂x(b) dx dy >
∫∫Bε(a)
c dx dy > 0
which, from (5.2) is a contradiction, hence there is no point a ∈ R2 with
∂2f
∂x∂y(a) >
∂2f
∂y∂x(a) .
A similar argument shows that there is no point a ∈ R2 with
∂2f
∂x∂y(a) <
∂2f
∂y∂x(a)
hence
∂2f
∂x∂y(a) =
∂2f
∂y∂x(a)
for all a ∈ R2.
5.2 Curved space
We now consider a more general setting, where the 2-dimensional region we integrate over can be ‘curved’ in Rmrather than lying as a ‘flat’ subset of R2. These ‘curved’ regions are called surfaces and are usually denoted by S.
Examples include:
A surface S ⊂ R3 A sphere in R3
Nick Sharples ©2016 Middlesex University 69

A torus in R3 A surface S ⊂ R3
In this section we will integrate functions f : S → R where S is a surface. For example, suppose that S was the
surface of the earth and the function f : S → R records the annual rainfall (in millimetres) at each point a ∈ S.The total annual volume of rainfall on earth is the integral of the function f over the surface S.
It is tempting to try and draw a graph of the function f : S → R, ‘above’ the surface S. This is misleading as the
idea of ‘above’ is poorly defined. For example, the point (0, 0, 0) in the centre of the torus hole could be regarded
as ‘above’ many of the points of the torus.
5.2.1 Defining surfaces
Before we can integrate over surfaces we must first define exactly what we mean by a surface and be able todescribe them. Roughly, a surface is a set described by a map s : U → Rm where U ⊂ R2. Each point of the surface
is determined by two parameters (u, v) ∈ U.
The ‘parameter space’ U must be ‘simply connected’, which means that U has no holes and we can move from any
point of U to any other point without leaving U. Formally:
Definition 5.6: Simply connected set
A set U ⊂ R2 is simply connected if
• U is path connected (for any two point a,b ∈ U there exists a path p : [0, 1]→ U with p (0) = a and
p (0) = b), and
• for any closed path p : [0, 1]→ U the interior of the curve tr (p) is contained in U.
We are now ready to define a simple surface:
Definition 5.7: Simple surface parametrisation
A simple surface parametrisation is an injective continuously differentiable map s : U → Rm, whereU ⊂ R2 is an open simply connected set, such that at every point (u, v) ∈ U the vectors
ds
du(u, v) and
ds
dv(u, v)
are linearly independent.
Nick Sharples ©2016 Middlesex University 70

Definition 5.8: Simple surface
A simple surface is a subset of Rm that is the trace of some simple surface parametrisation, i.e.
S = tr (s) = s (u, v) ∈ Rm| (u, v) ∈ U .
for some simple surface parametrisation s : U → Rm.
So surfaces and surface parametrisations are related in the same way as the curves and paths of Chapter 4.
Let’s look at some examples, the first is very important:
Example 5.9. Let f : R2 → R be an injective continuously differentiable function. The graph of f
graph (f ) =(x, y , f (x, y)) ∈ R3| (x, y) ∈ R2
is a simple surface in R3 parametrised by
s (u, v) =
u
v
f (u, v)
.
All graphs of continuously differentiable functions are surfaces. Surfaces are more general, as the following example
illustrates:
Example 5.10. The simple surface given by surface parametrisation s : R2 → R3 defined by
s (u, v) =
u2 + v2
u
v
00.2
0.40.6
0.81−1
0
1
−1
0
1
The surface S = tr (s) ⊂ R3
(0.810−0.9
)
(0.8100.9
)
This simple surface contains the points(0.810−0.9
)and
(0.8100.9
)so cannot be the graph of a function.
Nick Sharples ©2016 Middlesex University 71

Example 5.11.
P What does the surface with parametrisation s : (0, 6π)× (0, 1)→ R3
s (u, v) =
v cos(u)
v sin(u)
u
look like?
Example 5.12.
P Write down a parametrisation for the surface given by the interior of the triangle with vertices (2, 3, 1)T (1, 4, 2)T and
(2, 6, 2)T .
Nick Sharples ©2016 Middlesex University 72

5.2.2 More general surfaces
Simple surfaces are quite restrictive.
Example 5.13.
P A sphere is not a simple surface: it is not the continuous image of an open subset of R2.
A more general surface is made by ‘patching together’ a collection of simple surfaces. For example the sphere can
be written as the union of 6 overlapping simple surfaces:
The sphere as a union of 6 simple surfaces
The following is the formal definition for a surface, which is beyond the scope of this course:
Definition 5.14:
A surface is a set S ⊂ Rn that can be written as the union of finitely many simple surfaces S1, S2, . . . Skwhose intersections are ‘compatible’ in the sense that the maps si s−1j : Si ∩Sj → Si ∩Sj are continuously
differentiable.
This definition is, in fact, the definition of a 2-dimensional continuously differentiable manifold.
Manifolds are important mathematical objects as they are used to describe space-time in general relativity. Man-
ifolds are at the cutting edge of a variety of mathematical problems. In 2010 Grigori Perelman was awarded aClay Mathematics Institute Millennium Prize (worth $1, 000, 000) for proving the Poincaré conjecture, which is a
statement about classifications of 3 dimensional manifolds. Perelman turned down the prize money.
We will not use manifolds in this course. They are mentioned so that you have an idea of how calculus is rigorously
defined on objects like a sphere, torus, or space-time.
Nick Sharples ©2016 Middlesex University 73

However, it turns out that we can treat many common non-simple surfaces, such as spheres and toruses, in exactly
the same way as a simple surface.
The strategy then is the following:
1) We prove results for simple surfaces.
2) We apply these results to simple surfaces and some non-simple surfaces.
3) We understand that the application to some non-simple surfaces can be justified by rigorously treating them
as manifolds.
Our results will also apply to the following non-simple surfaces:
Ellipsoids
An ellipsoids (such as a spheres) is a subsets of R3 satisfying the equation
x2
a2+y2
b2+z2
c2= 1
for some fixed a, b, c ∈ R.
00
0
An ellipsoid in R3
This surface can be parametrised by the map
s : [0, 2π]× [−π/2, π/2]→ R3
s (θ, ψ) =
a cos θ cosψ
b cos θ sinψ
c sin θ
.
Nick Sharples ©2016 Middlesex University 74

Tori
The torus parallel to the xy -plane, centred on the origin with major radius r and minor radius b < r is the surface:
00
0
A torus in R3
Circle of radius r
Circle of radius b
This surface can be parametrised by the map
s : [0, 2π]× [0, 2π]→ R3
s (θ, ψ) =
(b + r cos θ) cosψ
(b + r cos θ) sinψ
r sin θ
.
5.2.3 Integration of scalar functions: heuristic definition
Let S ⊂ R3 be a surface, and let f : S → R be a continuous function.
We want to define the integral of f over S, which can be roughly thought of as the ‘volume’ between S and the
graph of f above S (but remember that the notion of ‘above’ a surface is poorly defined).
Take a particular surface, like the following:
A surface S ⊂ R3
Nick Sharples ©2016 Middlesex University 75

Suppose we can chop the surface into ‘patches’ like this:
S separated into patches.
For each patch let si ∈ S be a point in the patch, and let δσi be the ‘area’ of the patch. So f (si) δσi gives the
‘volume’ over the patch with height given by f . Summing the ‘volumes’ over every patch∑i
f (si) δσi
should give an approximation to the integral of f over S. Taking the limit as the patch size decreases we get∫∫S
f dσ = limδσ→0
∑i
f (si) δσi . (5.3)
To put this on a formal footing we need two things:
• a way of defining patches of S, and
• a way of measuring the ‘area’ δσi of the patches.
Both of these are provided by surface parametrisation s : U → R3:
Split U into mesh boxes of side length δu and δv .
U
δu
δv
u
v
The parameter space U
−2 −10
12−2
0
2
0
2
4
A single patchs
Nick Sharples ©2016 Middlesex University 76

Each box is of the form [u + δu]× [v + δv ] for some fixed (u, v) ∈ U. By mapping this box in the parameter space
forward under the map s, we get a patch s ([u + δu]× [v + δv ]) in the surface. Note that this patch contains the
point s (u, v).
So what is the area of the patch s ([u + δu]× [v + δv ])? The patch is a complicated, curved shape and we don’t
have a way of calculating its exact area (we will be able to do this once we have defined the integral!). Instead
we can approximate the patch by the parallelogram with sides s (u + δu, v)− s (u, v) and s (u, v + δv)− s (u, v).
Approximating a patch with a parallelogram
s (u, v + δv)− s (u, v)
s (u + δu, v)− s (u, v)
This parallelogram can be further approximated by the derivatives of s: As
s (u + δu, v)− s (u, v) ≈ δu∂s
∂u
s (u, v + δv)− s (u, v) ≈ δv∂s
∂v
we can consider the parallelogram P (u, v) whose sides are the vectors δu ∂s∂u and δv ∂s∂v . As we saw in Section 1.3.2
we can compute the area of this parallelogram using the cross product: Let
N (u, v) =∂s
∂u×∂s
∂v
then
Area (P ) = |N (u, v)| δuδvHence the area of the patch δσi is approximately
δσi ≈ |N (ui , vi)| δuiδviSubstituting into (5.3) we obtain∫∫
S
f dσ = limδσ→0
∑i
f (si) |N (ui , vi)| δuδv .
As the point si in the patch is approximated by s (ui , vi) we obtain
= limδσ→0
∑i
f (S (ui , vi)) |N (ui , vi)| δuδv
= limδu,δv→0
∑i
f (S (ui , vi)) |N (ui , vi)| δuδv
as δu, δv → 0 imply that δσ → 0. But this final quantity is simply the integral
=
∫∫U
f (s (u, v)) |N (u, v)| du dv
which we understand and know how to compute from Section 5.1!
Nick Sharples ©2016 Middlesex University 77

5.2.4 Integration of scalar functions: formal definition
Definition 5.15: Fundamental vector product
The Fundamental Vector ProductN : U → R3 of a surface parametrisation s : U → R3 is the vector function
N (u, v) =∂s
∂u×∂s
∂v
Example 5.16.
P
Nick Sharples ©2016 Middlesex University 78

We use the fundamental vector product to define integrals over the surface:
Definition 5.17: Surface integral
Let S ⊂ R3 be a surface and let f : S → R be a continuous function. The surface integral of f over S is
defined by ∫∫S
f dσ :=
∫∫U
f (s (u, v)) |N (u, v)| du dv
where s : U → R3 is a surface parametrisation of S and N is the fundamental vector product of the surface
parametrisation s.
Example 5.18.
P
From the heuristic definition we would hope that if a surface S ⊂ R3 has two parametrisations s : U → R3 andt : W → R3 then we should have equality∫∫
U
f (s (u, v))
∣∣∣∣ ∂s∂u × ∂s
∂v
∣∣∣∣ du dv = ∫∫W
f (t (a, b))
∣∣∣∣ ∂t∂a × ∂t
∂b
∣∣∣∣ da db.This is the case, and can be proved in a similar way to Theorem 4.15 using a change of variables.
Nick Sharples ©2016 Middlesex University 79

Surface area
Integrating the constant function f ≡ 1 over a surface S gives the surface area of S.
Definition 5.19: Surface area
The surface area of a surface S is ∫∫S
1 dσ
Example 5.20.
P
Nick Sharples ©2016 Middlesex University 80

5.3 Integrating vector fields
Let S ⊂ R3 be a surface and consider a continuous vector field v : R3 → R3.
The flux of v across S is a measure of how much the vector field v ‘crosses’ the surface S. For example, if the vector
field v describes the flow of some liquid, and S is the mouth of a pipe then the flux of v across S is the volume of
liquid leaving the pipe.
What we mean by ‘crossing’ the surface? Consider a point a ∈ S and let n (a) be a unit normal to the surface at
the point a.
• If the vector v (a) is perpendicular to n (a), then the vector v (a) doesn’t cross the surface at all, so its
contribution should be zero.
• If v (a) is pointing in the same direction as n (a) then the ‘full magnitude’ of the vector crosses the surface,
so its contribution should be |v (a)|.
More generally, if the vector v (a) approaches from an angle, then the contribution should be the component of
the vector in the direction of n (a). From Section 1.3.1 we see that this contribution is precisely the dot product
v (a) · n (a).
Note that we set n to be a unit vector (i.e. |n| = 1) so that the contribution at all points of S is treated equally.
Consequently, a reasonable definition for the flux of v across the surface S is the integral
∫∫S
v · n dσ
where n : S → R3 is a unit vector normal to the surface S. However, there there are two unit vectors perpendicular
to S, pointing in opposite directions. For our integral to make sense we must specify a direction. Consequently we
make the following definition:
Definition 5.21: Flux
Let S be a surface, let v : S → R3 be a vector field, and let n : S → R3 be a vector function that assigns the
unit normal to each point of S. The flux of v across the surface S in the direction n is the integral∫∫S
v · n dσ.
The dot product v · n : S → R is just a scalar function, which we know how to integrate from Definition 5.17. From
this definition we see that
∫∫S
v · n dσ =∫∫U
v (s (u, v)) · n (s (u, v)) |N (u, v)| du dv (5.4)
where N (u, v) is the fundamental vector product of the surface s.
Nick Sharples ©2016 Middlesex University 81

Example 5.22.
P Let S be the portion of the plane with equation x − y + z = 1 restricted between 0 < x < 1 and 0 < y < 1. Let
v : R3 → R3 be defined by
v (x, y , z) =
z
x − y
x + y
and let n be the normal to S with negative x-component. What is the flux of v through S in the direction n?
−10
12 0
1
2
−2
0
2
The plane portion S and the vector field v
Nick Sharples ©2016 Middlesex University 82

Example 5.23.
P Let S be a disc with centre (1, 3, 4)T and diameter 1 meter which is the entrance of an underwater cylindrical pipe
that extends in the direction n = 1√3(1, 1, 1)T .
The velocity of the water in meters per second is described by the vector field v (x, y , z) = (cos(x), sin(x), y + z)T .
What is the total flow of water into the pipe?
Finding n
In the previous example we found the vector n as we know about the geometry of planes. We need a way of
calculating this for general surfaces.
Lemma 5.24. Let S ⊂ R3 be a surface with surface parametrisation s : U → R3. The fundamental vector product
N (u, v) is normal to the surface at the point s (u, v).
Proof. The tangent plane at s (u, v) is spanned by the vectors ∂s∂u and ∂s∂v . Hence
N (u, v) =∂s
∂u×∂s
∂v
is orthogonal to the tangent plane at s (u, v).
Note that the fundamental vector product N (u, v) may not be a unit vector. To obtain a unit normal we simply
rescale it
n (s (u, v)) =N (u, v)
|N (u, v)| .
The other unit normal is in the opposite direction
n (s (u, v)) = −N (u, v)
|N (u, v)| .
Nick Sharples ©2016 Middlesex University 83

Consequently, from (5.4) we either have∫∫S
v · n dσ =∫∫U
v (s (u, v)) ·N (u, v)
|N (u, v)| |N (u, v)| du dv
=
∫∫U
v (s (u, v)) ·N (u, v) du dv
or ∫∫S
v · n dσ =∫∫U
v (s (u, v)) · −N (u, v)
|N (u, v)| |N (u, v)| du dv
=
∫∫U
v (s (u, v)) · −N (u, v) du dv
depending on which direction the normal n is specified.
Example 5.25.
P
Nick Sharples ©2016 Middlesex University 84

5.3.1 Fundamental Theorem of Calculus III: Stoke’s Theorem
Surface integrals can become difficult to perform for more complicated surfaces. However, for some vector fields v
we can find the integral∫∫S v · n dσ by instead calculating a line integral around the boundary of S, which is more
straightforward.
First, we must be precise about what we mean by the boundary.
Definition 5.26: Boundary of a set
The boundary of a set A is the set ∂A = A \ A, where A is the closure of A.
A surface S and its boundary ∂S
Surface S
Boundary ∂S
Theorem 5.27: Fundamental Theorem of Calculus III: Stokes’ Theorem
Premise
Let S ⊂ R3 be a surface whose boundary is a simple, closed piecewise continuously differentiable curve
C ⊂ R3. If v : R3 → R3 is a continuously differentiable vector function then
Conclusion ∫∫S
(∇× v) · n dσ =∮C
v · dr
where C is parametrised anti-clockwise when the surface normal n is pointing towards the viewer.
Proof.P
Nick Sharples ©2016 Middlesex University 85

Example 5.28.
P
Nick Sharples ©2016 Middlesex University 86

5.3.2 Fundamental Theorem of Calculus IV: The Divergence Theorem
Essentially, all of the Fundamental Theorems of Calculus we have seen so far tell us that the integral of a derivative
over a set is the same as the integral of a function over the boundary of the set. Schematically every Fundamental
Theorem of Calculus has the following form: ∫A
Df dµ =
∫∂A
f dν
• The classic FTC and the Gradient Theorem tell us that we can find a 1-dimensional line integral in terms of a
‘0-dimensional’ integral (a finite sum).
• Green’s Theorem and Stokes’ Theorem tell us that we can find a 2-dimensional surface integral in terms of a
1-dimensional integral.
So can we follow this pattern and evaluate a 3-dimensional ‘volume’ integral in terms of a 2-dimensional surface
integral?
The answer is yes, provided that S is a surface that ‘encloses’ a volume V . For example the sphere
S =x ∈ R3 | |x | = 1
‘encloses’ the ball
V =x ∈ R3 | |x | < 1
.
In general, a surface S encloses a volume V iff the surface S is compact (in the metric space sense). The proof is
similar to the Jordan Curve Theorem 4.11.
However, no simple surface is compact.
Lemma 5.29:
Premise
Let S ⊂ Rn be a simple surface.
Conclusion
Then S is not compact.
Proof.P
So we are unable to treat this situation rigorously without using manifolds. Nevertheless, we can still understand
and apply a Fundamental Theorem of Calculus for volumes integrals.
Nick Sharples ©2016 Middlesex University 87

Theorem 5.30: Fundamental Theorem of Calculus IV: Divergence Theorem
Premise
Let S ⊂ R3 be a compact surface. Let V ⊂ R3 denote the volume bounded by S. If v : R3 → R3 is a
continuously differentiable vector field then
Conclusion ∫∫S
v · n dσ =∫∫∫
V
∇ · v dx dy dz
when the surface normal n is pointing out of the volume V .
Proof.P
Example 5.31.
P
Nick Sharples ©2016 Middlesex University 88

5.4 Final remarks
Nick Sharples ©2016 Middlesex University 89