Embed Size (px)
Citation preview

Michał Pióro 1
Optimization
Michał Pióro
Department of Electrical
and Information Technology
LTH

Michał Pióro 2
to present basic optimization approaches
applicable to engineering problems, including
communication networks design
multi-commodity flow network models
resource dimensioning (link capacity)
routing of demands (flows)
optimization methods
linear programming
mixed-integer programming
heuristic methods
purpose

Michał Pióro 3
optimization literature
M. Pióro and D. Medhi: Routing, Flow, and Capacity Design in
Communication and Computer Networks chapters 4 and 5, Morgan
Kaufmann, 2004
L. Lasdon: Optimization Theory for Large Systems, McMillan, 1972
L.A. Wosley: Integer Programming, J.Wiley, 1998
(M. Pióro: Network Optimization Techniques, Chapter 18 in
Mathematical Foundations for Signal Processing,
Communications, and Networking, E. Serpedin, T. Chen, D. Rajan
(eds.), CRC Press, 2012)
Michał Pióro 4
CONTENTS
Part I
Classification of optimization problems
Convexity, relaxation, duality
Multicommodity flow network optimization problem – example
Basics of linear programming (LP)
The simplex method
Duality in LP, path generation (PG)
Part II
Mixed integer programming (MIP)
Branch and bound
Modeling non-linearities, NP-completeness

Michał Pióro 5
basic notions
set X Rn is
bounded: contained in a ball B(0,r) = { x Rn : x r }
closed: for any { xn X, n=1,2,…}, lim xn X (if lim exists), X = closure(X)
compact: bounded and closed (every sequence contains a convergent subsequence)
open: x X r > 0, B(x,r) X (Rn \ X is closed)
function f: X R is continuous (X - closed) f(lim xn) = lim f(xn)
extreme value theorem (Weierstrass) theorem:
assumptions: continuous function f: X R, X compact
f achieves max and min on X.
linear function: f(x) = a1x1 + a2x2 + … + anxn = ax
(n-1) dimensional hyperplane: ax = c
half-space: ax c
Michał Pióro 6
basic notions - examples
intervals (a,b), [a,b], (a,b] in R1
disc in R2: D = { (x1,x2): x12 + x2
2 r2 }, circumference D = { (x1,x2): x12 + x2
2 = r2 }
disc in R2: D = { (x1,x2): x12 + x2
2 < r2 }
simplex in R3: S = {(x1,x2,x3): x1 + x2 + x3 1, x1 0, x2 0, x3 0 }
polyhedron: x Rn: Ax b
functions: quadratic, square root, linear, …

Michał Pióro 7
convexity (concavity)
set X Rn is convex iff
for each pair of points x, y X, the segment [x,y] X, i.e.,
{ (1-)x + y : 0 1 } X
conv(X) – convex hull of (a non-convex) X: the smallest convex set including X
conv(X) – set of all convex combinations of the finite subsets of X
function f: X R is convex (for convex X) iff
for each x, y X and for each scalar (0 1)
f((1-)x + y) (1-)f(x) + f(y)
strictly convex: if < for 0 < < 1
function f: X R is concave (for convex X) if –f is convex
convex continuous

Michał Pióro 8
general form of optimization problems
optimization problem (OP):
minimize F(x) F: X R objective function
x X X Rn optimization space, feasible set
x = (x1,x2,…,xn) Rn variables
convex problem (CXP):
X – convex set
F – convex function
effectively tractable
linear programming (LP) problem
a very special convex problem (X – polyhedron, F – linear function)
efficient methods (simplex method)
non-convex problems
(mixed) integer programming problems (MIP) (LP with discrete variables)
linear constraints and concave objective function (CVP)
Michał Pióro 9
common form
optimization problem:
minimize F(x)
subject to
hi(x) = 0 i=1,2,..,m
gj(x) 0 j=1,2,..,k
x X
constraints
h – explicit equality constraints
g – explicit inequality constraints
X – the set representing other constraints (e.g., x 0)
Michał Pióro 10
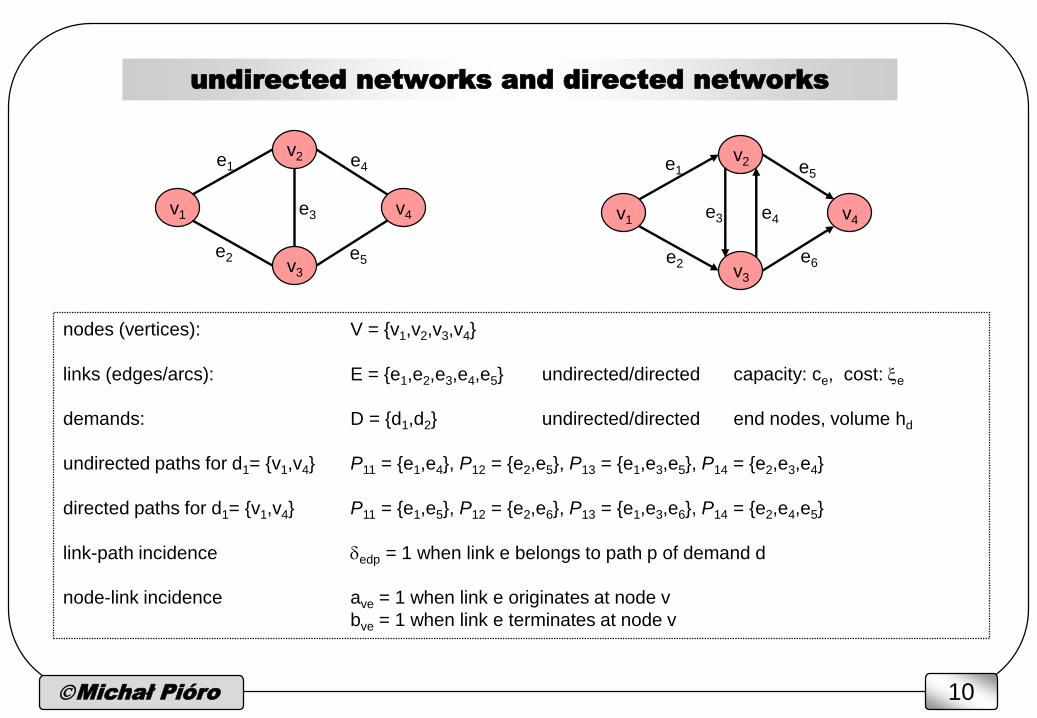
undirected networks and directed networks
nodes (vertices): V = {v1,v2,v3,v4}
links (edges/arcs): E = {e1,e2,e3,e4,e5} undirected/directed capacity: ce, cost: e
demands: D = {d1,d2} undirected/directed end nodes, volume hd
undirected paths for d1= {v1,v4} P11 = {e1,e4}, P12 = {e2,e5}, P13 = {e1,e3,e5}, P14 = {e2,e3,e4}
directed paths for d1= {v1,v4} P11 = {e1,e5}, P12 = {e2,e6}, P13 = {e1,e3,e6}, P14 = {e2,e4,e5}
link-path incidence edp = 1 when link e belongs to path p of demand d
node-link incidence ave = 1 when link e originates at node v
bve = 1 when link e terminates at node v
v2
v1 v4
v3
v2
v1 v4
v3
e1
e2 e5
e4
e3
e1
e2
e3 e4
e5
e6
Michał Pióro 11
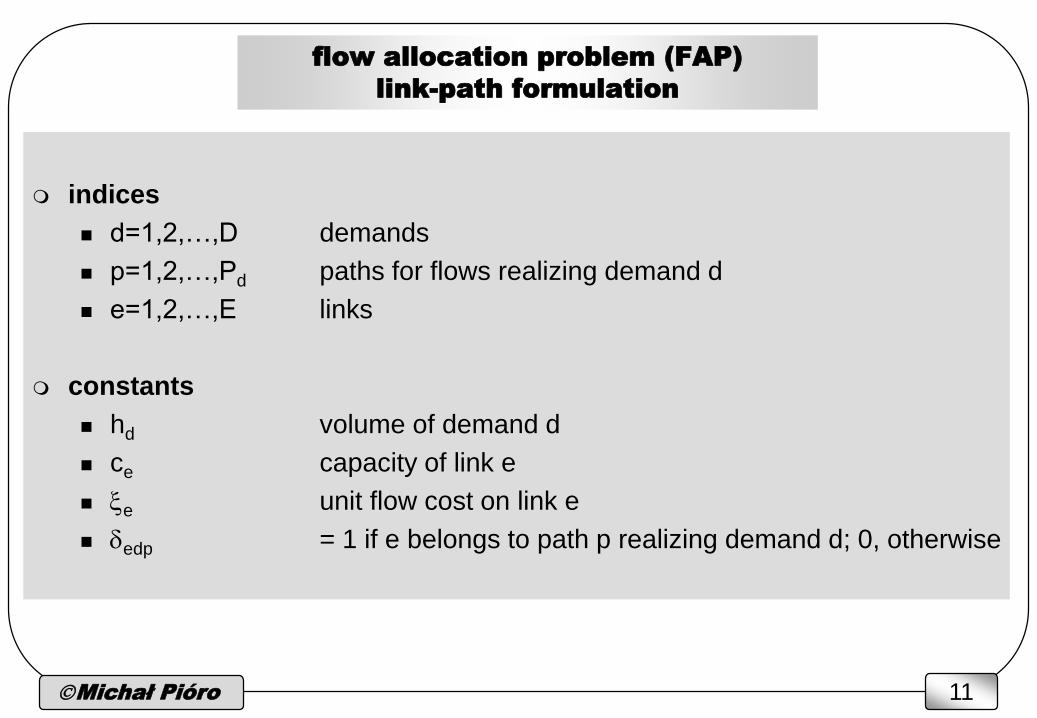
flow allocation problem (FAP)
link-path formulation
indices
d=1,2,…,D demands
p=1,2,…,Pd paths for flows realizing demand d
e=1,2,…,E links
constants
hd volume of demand d
ce capacity of link e
e unit flow cost on link e
edp = 1 if e belongs to path p realizing demand d; 0, otherwise
Michał Pióro 12
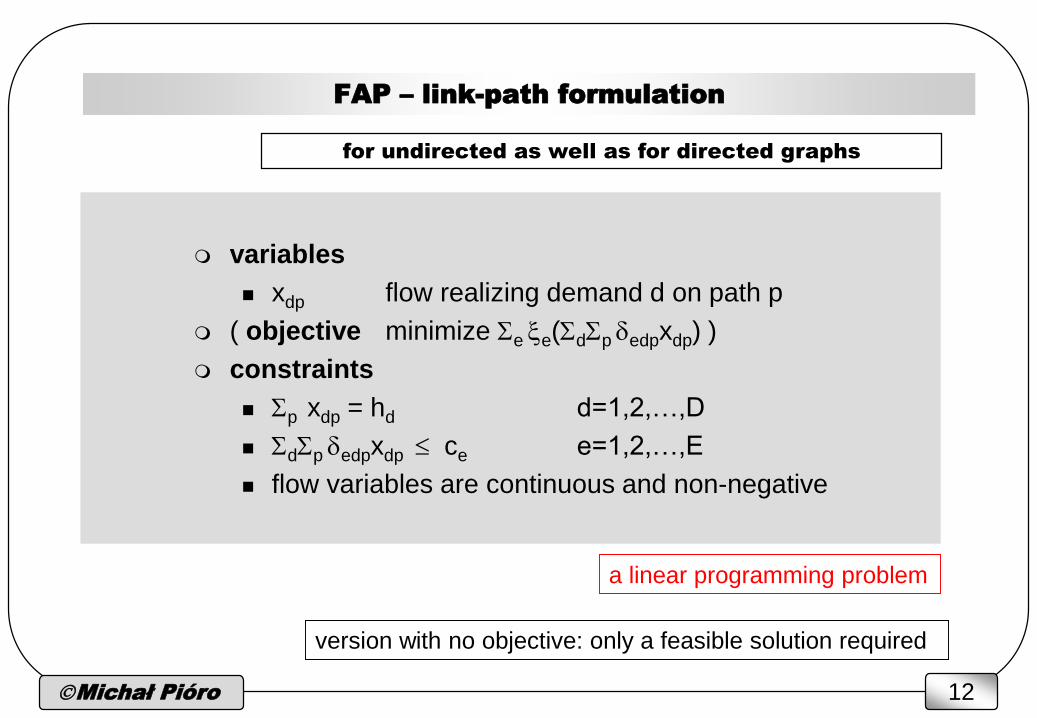
FAP – link-path formulation
variables
xdp flow realizing demand d on path p
( objective minimize Se e(SdSp edpxdp) )
constraints
Sp xdp = hd d=1,2,…,D
SdSp edpxdp ce e=1,2,…,E
flow variables are continuous and non-negative
version with no objective: only a feasible solution required
for undirected as well as for directed graphs
a linear programming problem
Michał Pióro 13
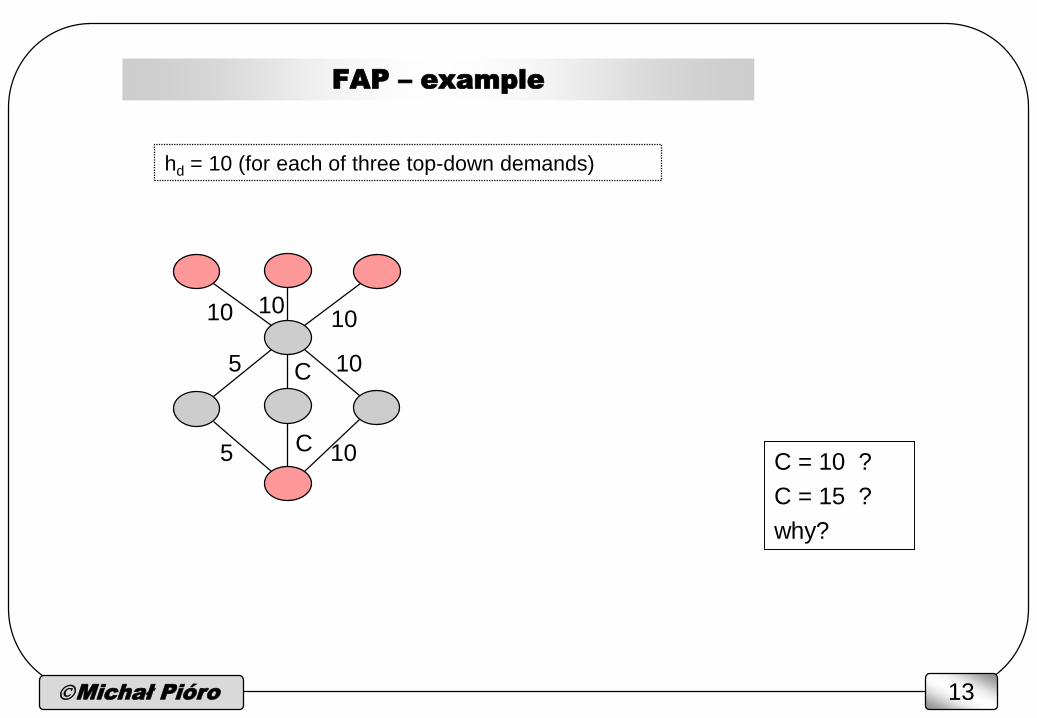
FAP – example
hd = 10 (for each of three top-down demands)
10
5
5
10
10
1010
C
CC = 10 ?
C = 15 ?
why?
Michał Pióro 14
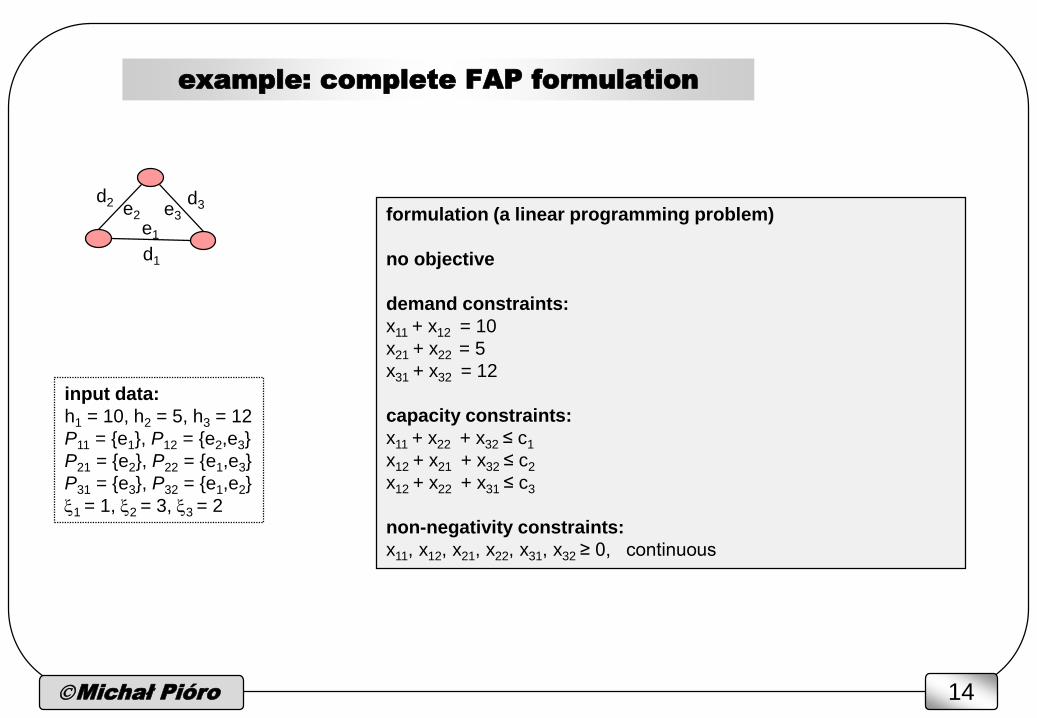
example: complete FAP formulation
input data:
h1 = 10, h2 = 5, h3 = 12
P11 = {e1}, P12 = {e2,e3}
P21 = {e2}, P22 = {e1,e3}
P31 = {e3}, P32 = {e1,e2}
1 = 1, 2 = 3, 3 = 2
formulation (a linear programming problem)
no objective
demand constraints:
x11 + x12 = 10
x21 + x22 = 5
x31 + x32 = 12
capacity constraints:
x11 + x22 + x32 ≤ c1
x12 + x21 + x32 ≤ c2
x12 + x22 + x31 ≤ c3
non-negativity constraints:
x11, x12, x21, x22, x31, x32 ≥ 0, continuous
d1
e3e2
e1
d3d2
Michał Pióro 15
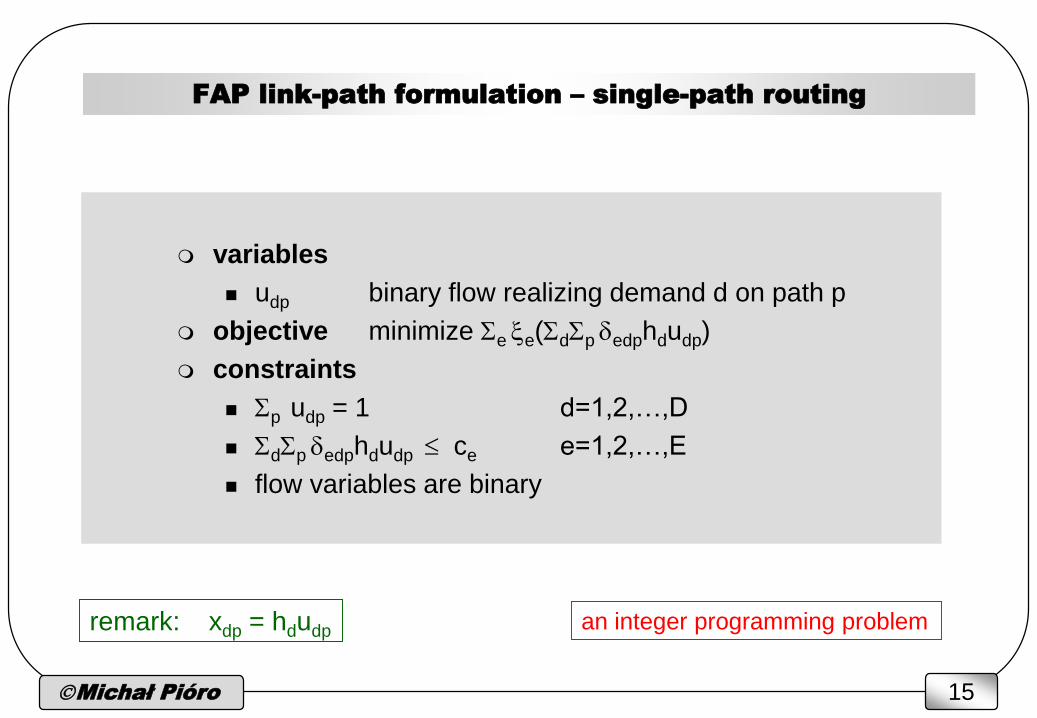
FAP link-path formulation – single-path routing
variables
udp binary flow realizing demand d on path p
objective minimize Se e(SdSp edphdudp)
constraints
Sp udp = 1 d=1,2,…,D
SdSp edphdudp ce e=1,2,…,E
flow variables are binary
an integer programming problemremark: xdp = hdudp

Michał Pióro 16
linear programming -
a problem and its solution
maximize z = x1 + 3x2
subject to - x1 + x2 1
x1 + x2 2
x1 0 , x2 0
x2
x1
-x1+x2 = 1
x1+3x2 =zz=5
z=3
z=0
(1/2,3/2)
extreme point (vertex)
z=2
x1+x2 = 2

Michał Pióro 17
linear programming -
another objective function
maximize z = x1 - x2
subject to - x1 + x2 1
x1 + x2 2
x1 0 , x2 0
x2
x1
-x1+x2 = 1
x1+3x2 =z
z=2
z= -1
z=0
(2,0)
extreme point (vertex)
z=
x1+x2 = 2
Michał Pióro 18
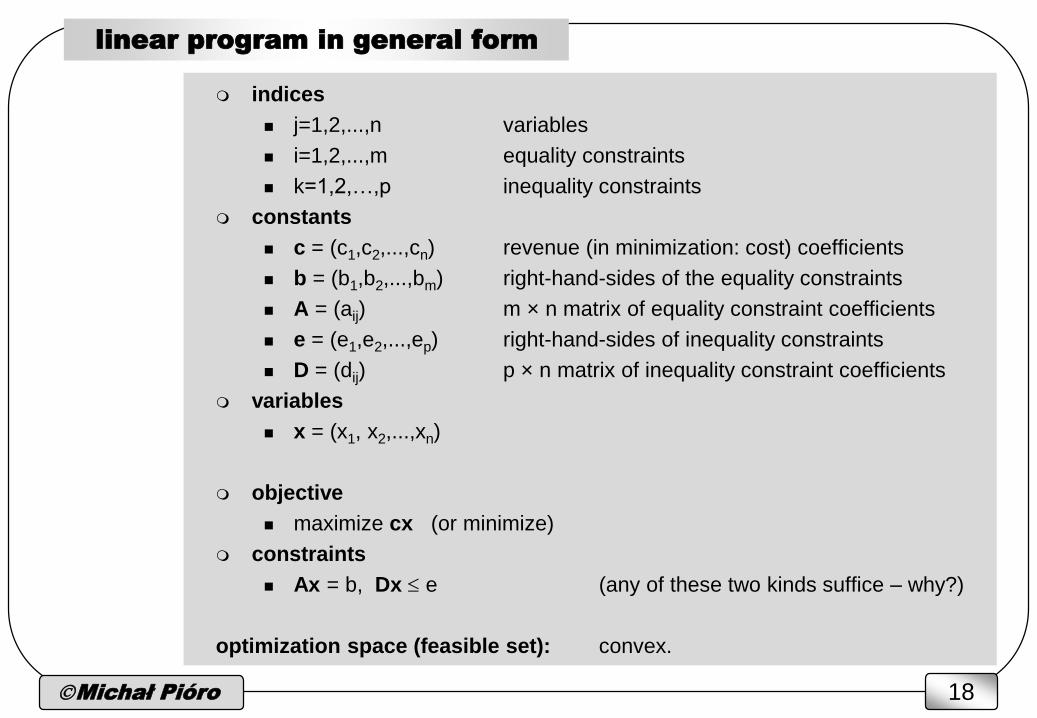
linear program in general form
indices
j=1,2,...,n variables
i=1,2,...,m equality constraints
k=1,2,…,p inequality constraints
constants
c = (c1,c2,...,cn) revenue (in minimization: cost) coefficients
b = (b1,b2,...,bm) right-hand-sides of the equality constraints
A = (aij) m × n matrix of equality constraint coefficients
e = (e1,e2,...,ep) right-hand-sides of inequality constraints
D = (dij) p × n matrix of inequality constraint coefficients
variables
x = (x1, x2,...,xn)
objective
maximize cx (or minimize)
constraints
Ax = b, Dx e (any of these two kinds suffice – why?)
optimization space (feasible set): convex.
Michał Pióro 19
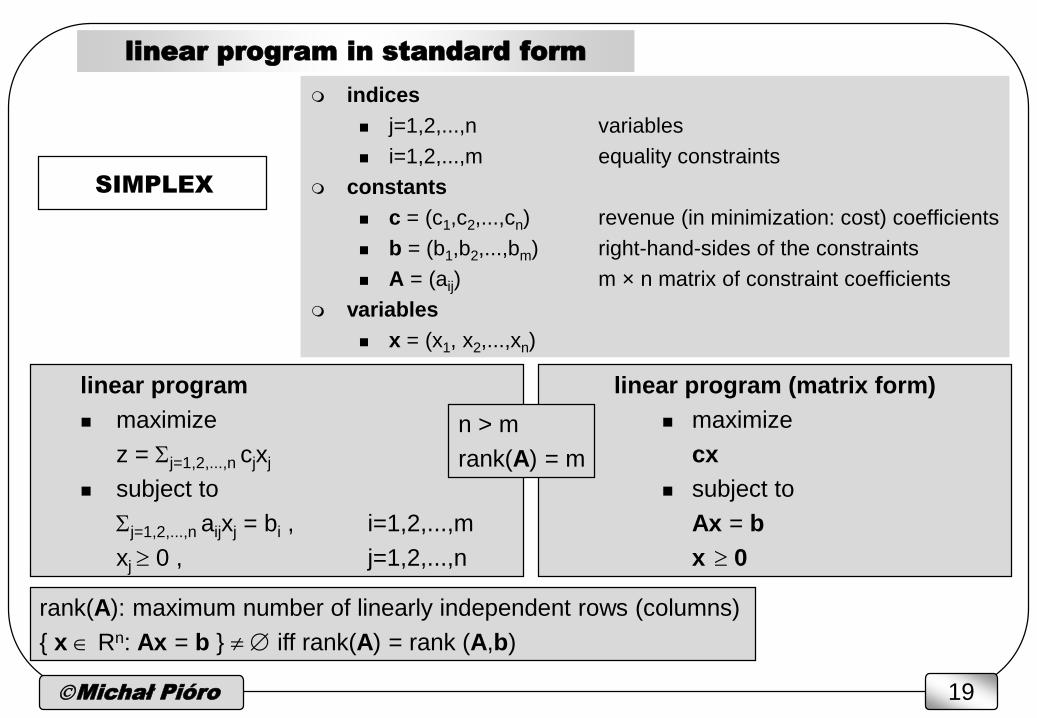
linear program in standard form
indices
j=1,2,...,n variables
i=1,2,...,m equality constraints
constants
c = (c1,c2,...,cn) revenue (in minimization: cost) coefficients
b = (b1,b2,...,bm) right-hand-sides of the constraints
A = (aij) m × n matrix of constraint coefficients
variables
x = (x1, x2,...,xn)
linear program
maximize
z = Sj=1,2,...,n cjxj
subject to
Sj=1,2,...,n aijxj = bi , i=1,2,...,m
xj 0 , j=1,2,...,n
linear program (matrix form)
maximize
cx
subject to
Ax = b
x 0
n > m
rank(A) = m
SIMPLEX
rank(A): maximum number of linearly independent rows (columns)
{ x Rn: Ax = b } iff rank(A) = rank (A,b)

Michał Pióro 20
transformation of LPs to the standard form
slack variables
Sj=1,2,...,n aijxj bi to Sj=1,2,...,n aijxj + xn+i = bi , xn+i 0
Sj=1,2,...,n aijxj bi to Sj=1,2,...,n aijxj - xn+i = bi , xn+i 0
remark: in exercises we will use si instead of xn+i
nonnegative variables
xk with unconstrained sign: xk = xk - xk
, xk 0 , xk
0
exercise: transform the following LP to the standard form
maximize z = x1 + x2
subject to 2x1 + 3x2 6
x1 + 7x2 4
x1 + x2 = 3
x1 0 , x2 unconstrained in sign
Michał Pióro 21
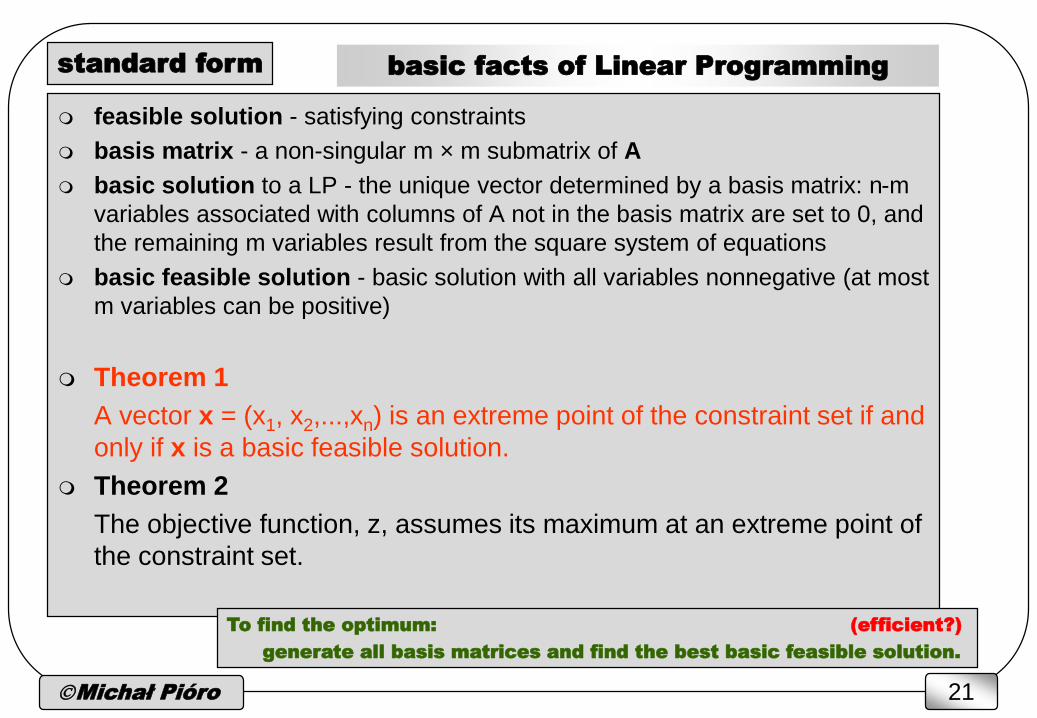
basic facts of Linear Programming
feasible solution - satisfying constraints
basis matrix - a non-singular m × m submatrix of A
basic solution to a LP - the unique vector determined by a basis matrix: n-m
variables associated with columns of A not in the basis matrix are set to 0, and
the remaining m variables result from the square system of equations
basic feasible solution - basic solution with all variables nonnegative (at most
m variables can be positive)
Theorem 1
A vector x = (x1, x2,...,xn) is an extreme point of the constraint set if and
only if x is a basic feasible solution.
Theorem 2
The objective function, z, assumes its maximum at an extreme point of
the constraint set.
standard form
To find the optimum: (efficient?)
generate all basis matrices and find the best basic feasible solution.
Michał Pióro 22
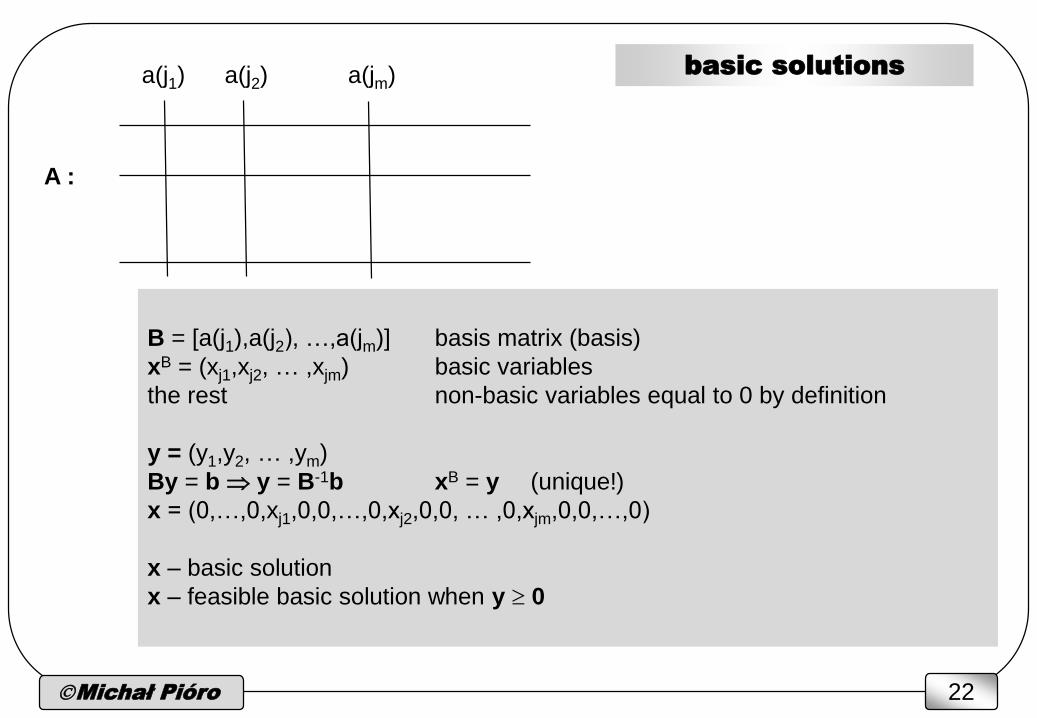
basic solutions
A :
a(j1) a(j2) a(jm)
B = [a(j1),a(j2), …,a(jm)] basis matrix (basis)
xB = (xj1,xj2, … ,xjm) basic variables
the rest non-basic variables equal to 0 by definition
y = (y1,y2, … ,ym)
By = b y = B-1b xB = y (unique!)
x = (0,…,0,xj1,0,0,…,0,xj2,0,0, … ,0,xjm,0,0,…,0)
x – basic solution
x – feasible basic solution when y 0
Michał Pióro 23
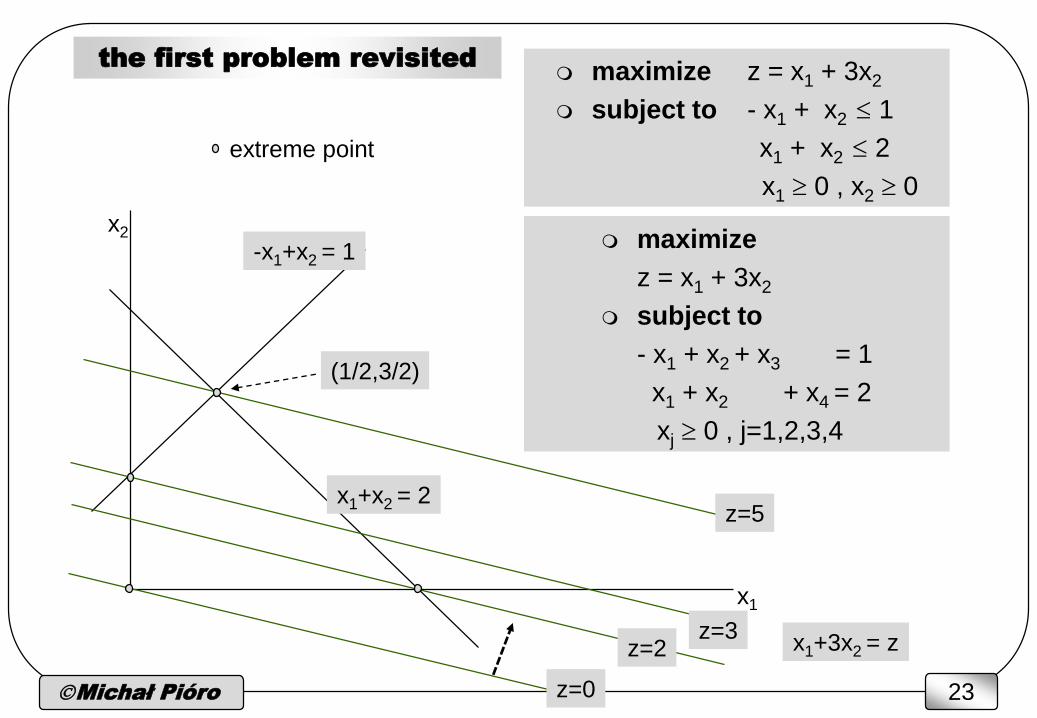
the first problem revisited maximize z = x1 + 3x2
subject to - x1 + x2 1
x1 + x2 2
x1 0 , x2 0
x2
x1
-x1+x2 = 1
x1+x2 = 2
x1+3x2 = z
z=5
z=3
z=0
(1/2,3/2)
extreme point
maximize
z = x1 + 3x2
subject to
- x1 + x2 + x3 = 1
x1 + x2 + x4 = 2
xj 0 , j=1,2,3,4
z=2
Michał Pióro 24
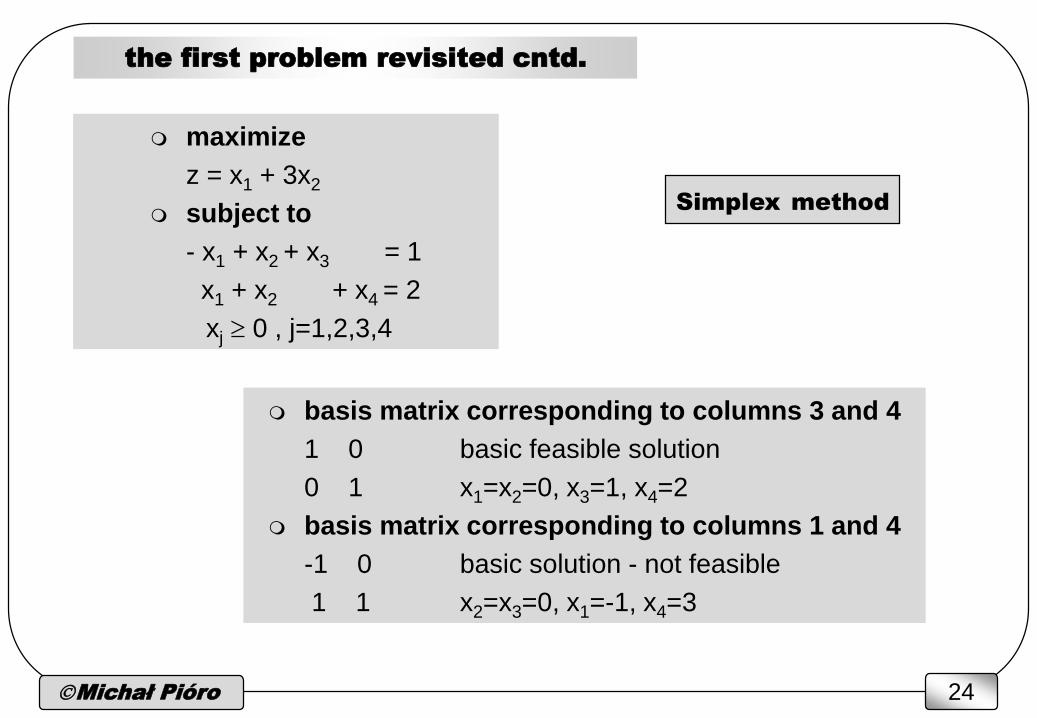
the first problem revisited cntd.
maximize
z = x1 + 3x2
subject to
- x1 + x2 + x3 = 1
x1 + x2 + x4 = 2
xj 0 , j=1,2,3,4
basis matrix corresponding to columns 3 and 4
1 0 basic feasible solution
0 1 x1=x2=0, x3=1, x4=2
basis matrix corresponding to columns 1 and 4
-1 0 basic solution - not feasible
1 1 x2=x3=0, x1=-1, x4=3
Simplex method
Michał Pióro 25
Simplex method
simplex method in general works in two phases:
Phase 1: finding an initial basic feasible solution (extreme
point)
sometimes can be guessed
in general: Phase 1
Phase 2: going through extreme points of the constraint set
decreasing the objective function in each step
by exchanging one variable in the basis matrix (pivoting)
Michał Pióro 26
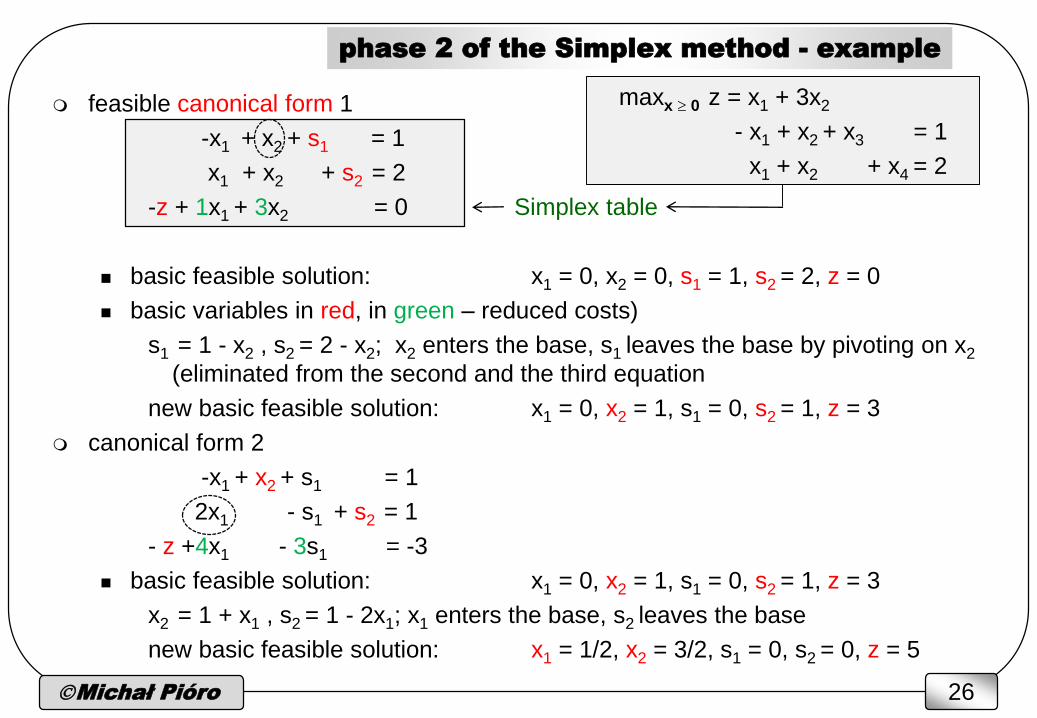
feasible canonical form 1
-x1 + x2 + s1 = 1
x1 + x2 + s2 = 2
-z + 1x1 + 3x2 = 0 Simplex table
basic feasible solution: x1 = 0, x2 = 0, s1 = 1, s2 = 2, z = 0
basic variables in red, in green – reduced costs)
s1 = 1 - x2 , s2 = 2 - x2; x2 enters the base, s1 leaves the base by pivoting on x2
(eliminated from the second and the third equation
new basic feasible solution: x1 = 0, x2 = 1, s1 = 0, s2 = 1, z = 3
canonical form 2
-x1 + x2 + s1 = 1
2x1 - s1 + s2 = 1
- z +4x1 - 3s1 = -3
basic feasible solution: x1 = 0, x2 = 1, s1 = 0, s2 = 1, z = 3
x2 = 1 + x1 , s2 = 1 - 2x1; x1 enters the base, s2 leaves the base
new basic feasible solution: x1 = 1/2, x2 = 3/2, s1 = 0, s2 = 0, z = 5
phase 2 of the Simplex method - example
maxx 0 z = x1 + 3x2
- x1 + x2 + x3 = 1
x1 + x2 + x4 = 2
Michał Pióro 27
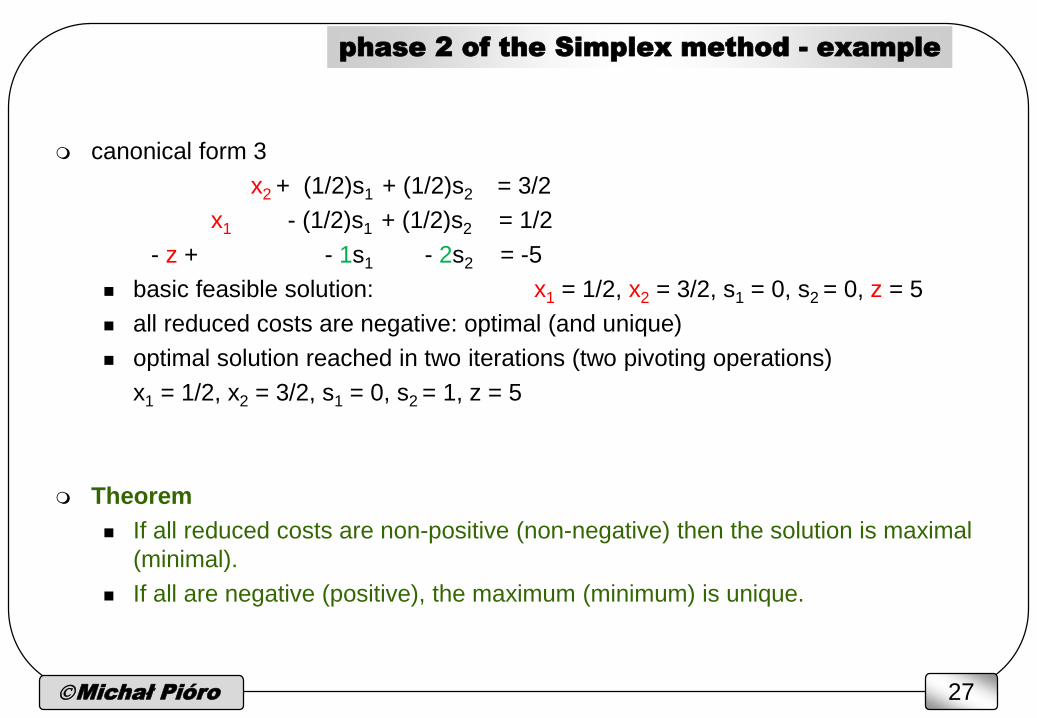
canonical form 3
x2 + (1/2)s1 + (1/2)s2 = 3/2
x1 - (1/2)s1 + (1/2)s2 = 1/2
- z + - 1s1 - 2s2 = -5
basic feasible solution: x1 = 1/2, x2 = 3/2, s1 = 0, s2 = 0, z = 5
all reduced costs are negative: optimal (and unique)
optimal solution reached in two iterations (two pivoting operations)
x1 = 1/2, x2 = 3/2, s1 = 0, s2 = 1, z = 5
Theorem
If all reduced costs are non-positive (non-negative) then the solution is maximal
(minimal).
If all are negative (positive), the maximum (minimum) is unique.
phase 2 of the Simplex method - example
Michał Pióro 28
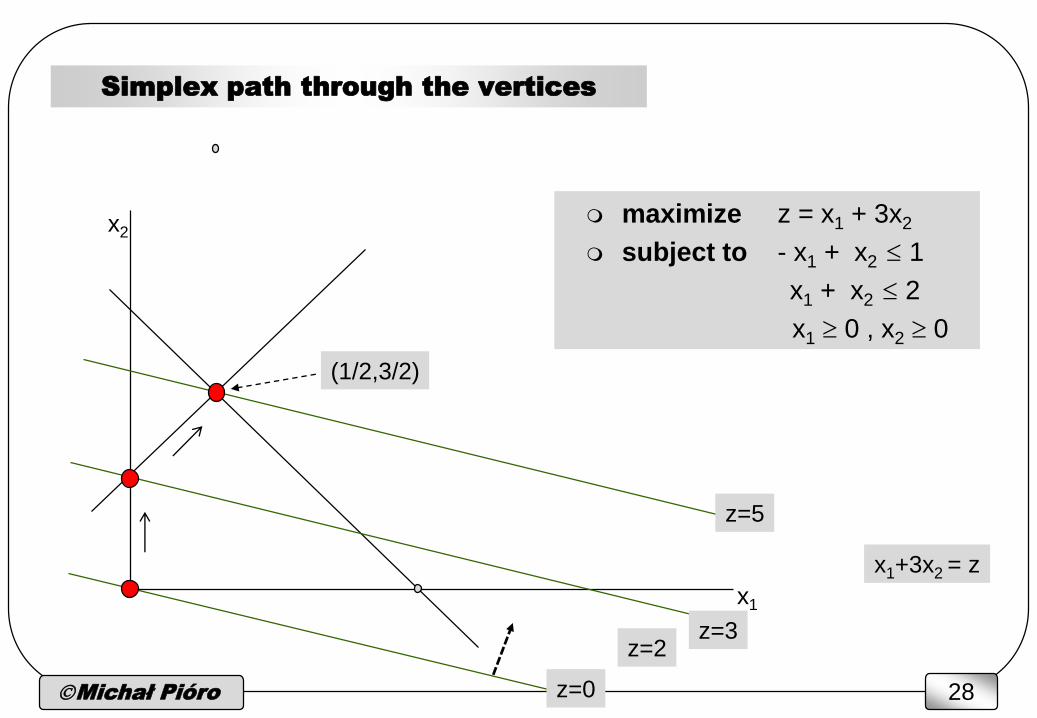
Simplex path through the vertices
maximize z = x1 + 3x2
subject to - x1 + x2 1
x1 + x2 2
x1 0 , x2 0
x2
x1
x1+3x2 = z
z=5
z=3
z=0
(1/2,3/2)
z=2
Michał Pióro 29
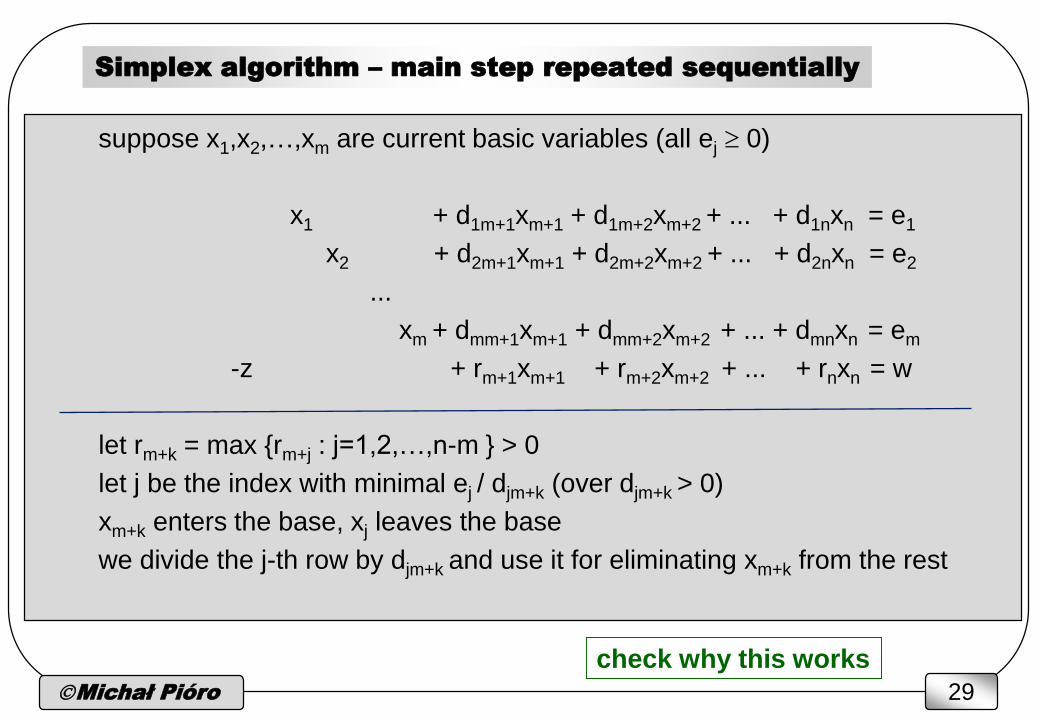
Simplex algorithm – main step repeated sequentially
suppose x1,x2,…,xm are current basic variables (all ej 0)
x1 + d1m+1xm+1 + d1m+2xm+2 + ... + d1nxn = e1
x2 + d2m+1xm+1 + d2m+2xm+2 + ... + d2nxn = e2
...
xm + dmm+1xm+1 + dmm+2xm+2 + ... + dmnxn = em
-z + rm+1xm+1 + rm+2xm+2 + ... + rnxn = w
let rm+k = max {rm+j : j=1,2,…,n-m } > 0
let j be the index with minimal ej / djm+k (over djm+k > 0)
xm+k enters the base, xj leaves the base
we divide the j-th row by djm+k and use it for eliminating xm+k from the rest
check why this works

Michał Pióro 30
Simplex method – phase 1
Phase 1: finding an initial basic feasible solution
minimize xn+1+ xn+2 +...+ xn+m
a11x1+a12x2+...+a1nxn+xn+1 = b1
a21x1+a22x2+...+a2nxn +xn+2 = b2
...
am1x1+am2x2+...+amnxn +xn+m = bm
xj 0 , j=1,2,...,m+n (xn+i - artificial variables)
bi have all been made positive
Remark: We can keep the original objective as an additional row of the
Simplex table. Then we can immediately start Phase 2 once all
artificial variables become equal to 0.
Michał Pióro 31
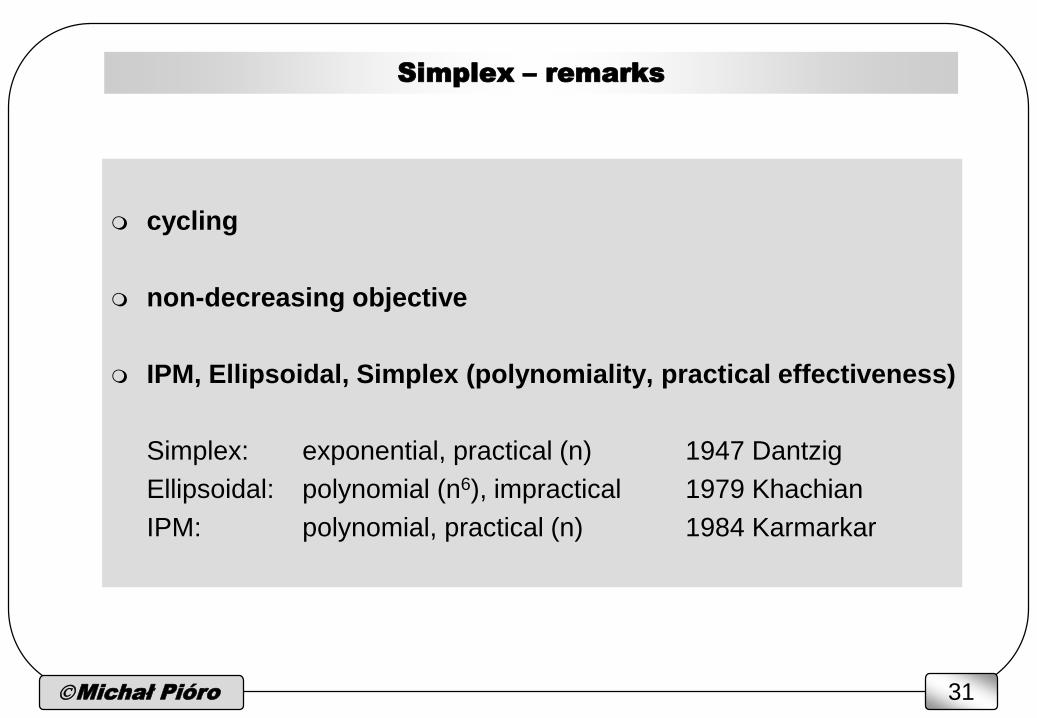
Simplex – remarks
cycling
non-decreasing objective
IPM, Ellipsoidal, Simplex (polynomiality, practical effectiveness)
Simplex: exponential, practical (n) 1947 Dantzig
Ellipsoidal: polynomial (n6), impractical 1979 Khachian
IPM: polynomial, practical (n) 1984 Karmarkar
Michał Pióro 32
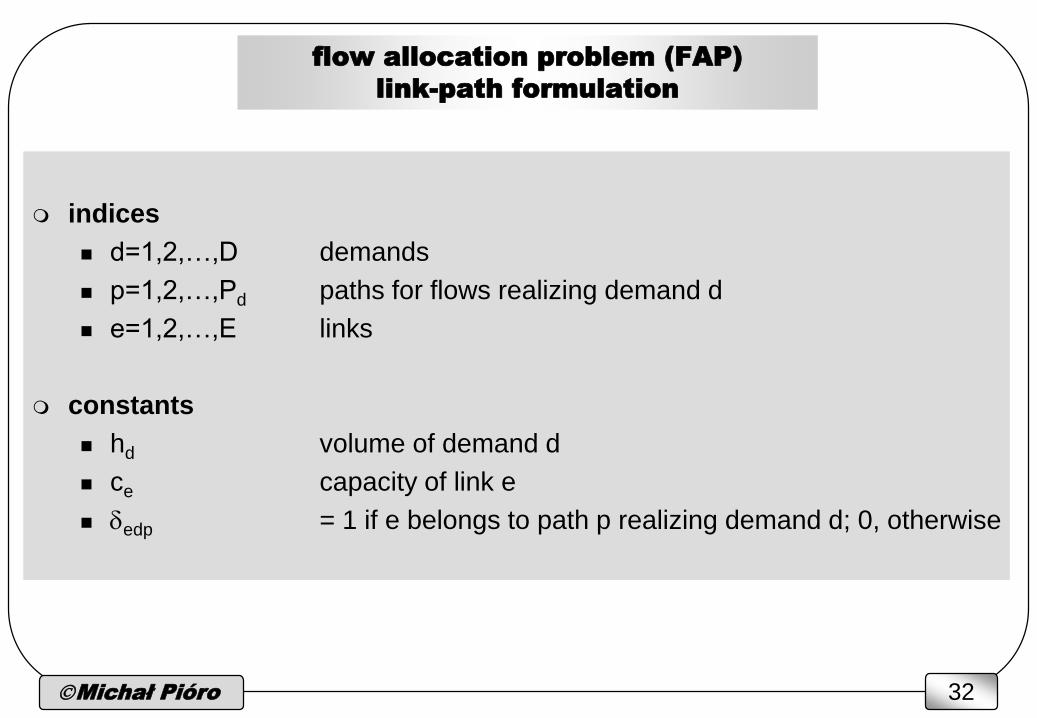
flow allocation problem (FAP)
link-path formulation
indices
d=1,2,…,D demands
p=1,2,…,Pd paths for flows realizing demand d
e=1,2,…,E links
constants
hd volume of demand d
ce capacity of link e
edp = 1 if e belongs to path p realizing demand d; 0, otherwise
Michał Pióro 33
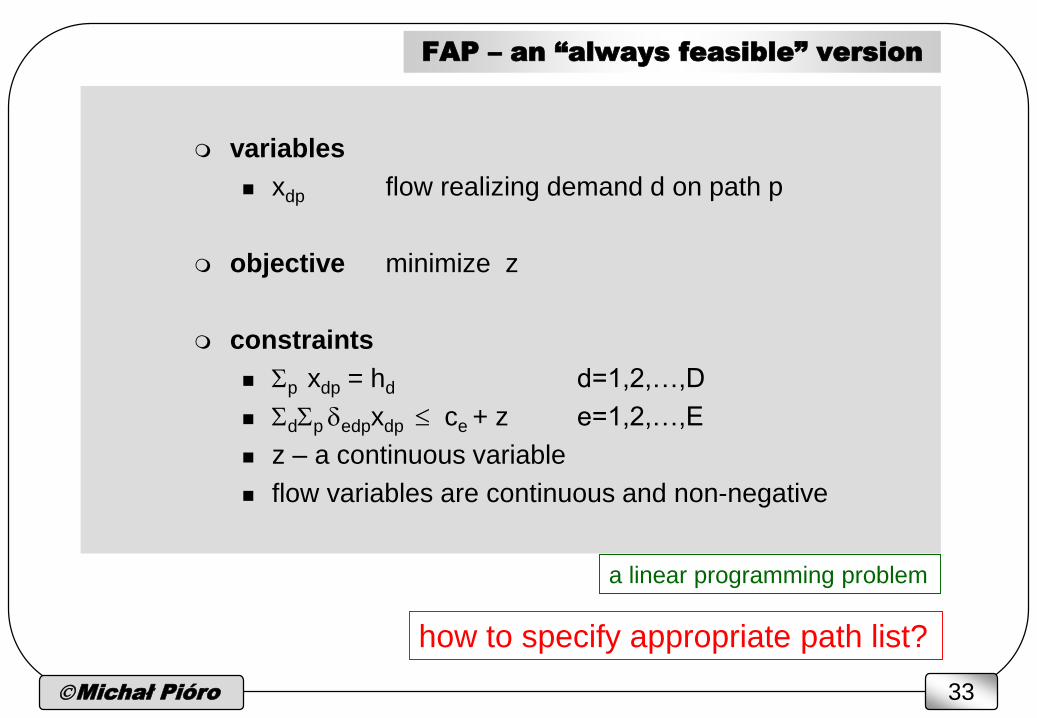
variables
xdp flow realizing demand d on path p
objective minimize z
constraints
Sp xdp = hd d=1,2,…,D
SdSp edpxdp ce + z e=1,2,…,E
z – a continuous variable
flow variables are continuous and non-negative
a linear programming problem
how to specify appropriate path list?
FAP – an “always feasible” version

Michał Pióro 34
example of the difficulty
the number of paths in the graph grows
exponentially so we simply cannot put
them all on the path lists! 5 by 5 Manhattan network (n = 5):
70 shortest-hop paths between two
opposite corners
h = 1 +
c = 1 + c = 1 +
c = 1 + c = 1 + all 10 demands but one with h = 1
all 10 links but four with capacity 1
how should we know that the thick path
must be used to get the optimal solution?
Michał Pióro 35
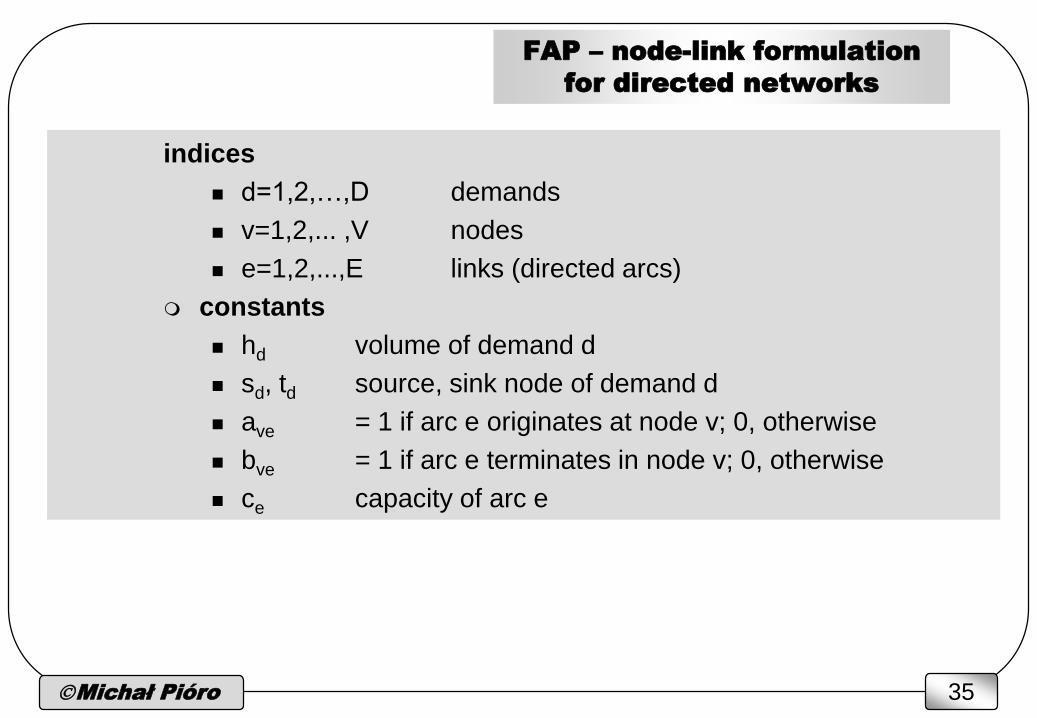
FAP – node-link formulation
for directed networks
indices
d=1,2,…,D demands
v=1,2,... ,V nodes
e=1,2,...,E links (directed arcs)
constants
hd volume of demand d
sd, td source, sink node of demand d
ave = 1 if arc e originates at node v; 0, otherwise
bve = 1 if arc e terminates in node v; 0, otherwise
ce capacity of arc e

Michał Pióro 36
node-link formulation for directed networks
variables
xed 0 flow of demand d on arc e
objective minimize z
constraints
= hd if v = sd
Se ave xed - Se bve xed = 0 if v sd,td
= - hd if v = td
v=1,2,...,V, d=1,2,…,D
Sd xed ce + z e=1,2,…,E
we need to find the path flows (loops possible)xed = Sp edpxdp link flows
Michał Pióro 37
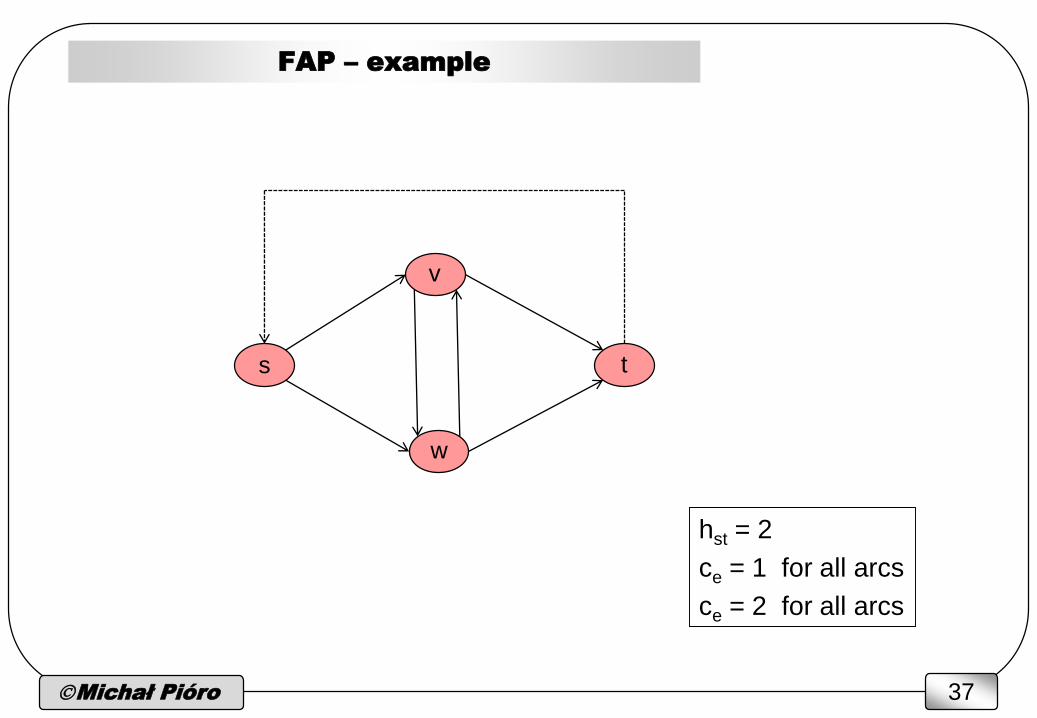
FAP – example
w
v
ts
hst = 2
ce = 1 for all arcs
ce = 2 for all arcs
Michał Pióro 38
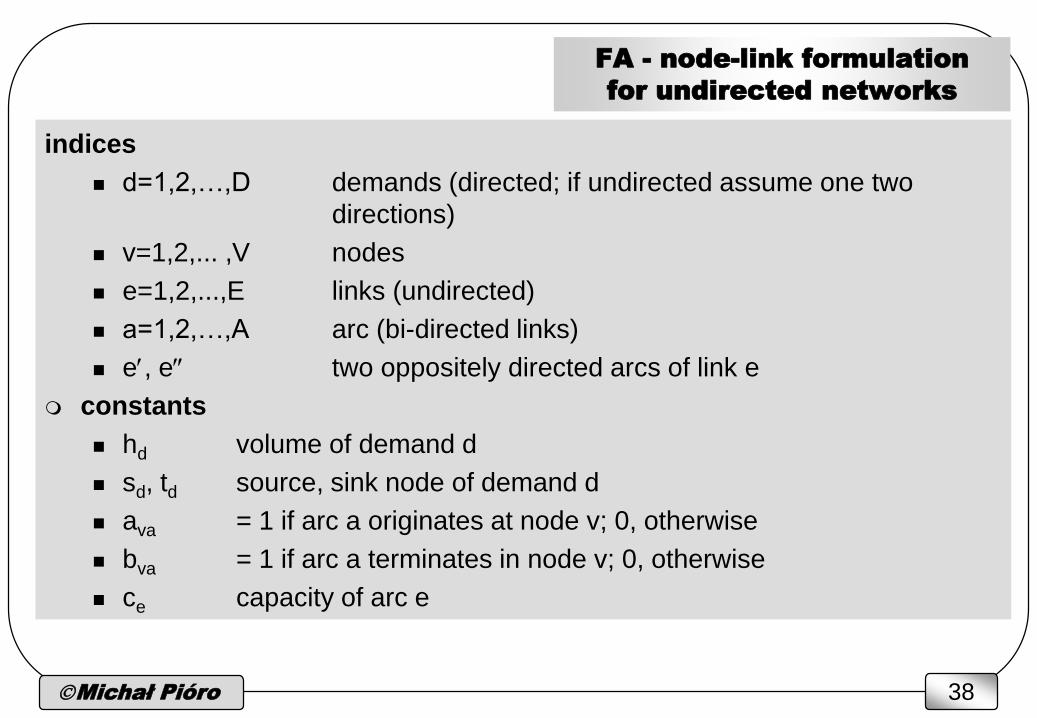
FA - node-link formulation
for undirected networks
indices
d=1,2,…,D demands (directed; if undirected assume one two
directions)
v=1,2,... ,V nodes
e=1,2,...,E links (undirected)
a=1,2,…,A arc (bi-directed links)
e, e two oppositely directed arcs of link e
constants
hd volume of demand d
sd, td source, sink node of demand d
ava = 1 if arc a originates at node v; 0, otherwise
bva = 1 if arc a terminates in node v; 0, otherwise
ce capacity of arc e
Michał Pióro 39
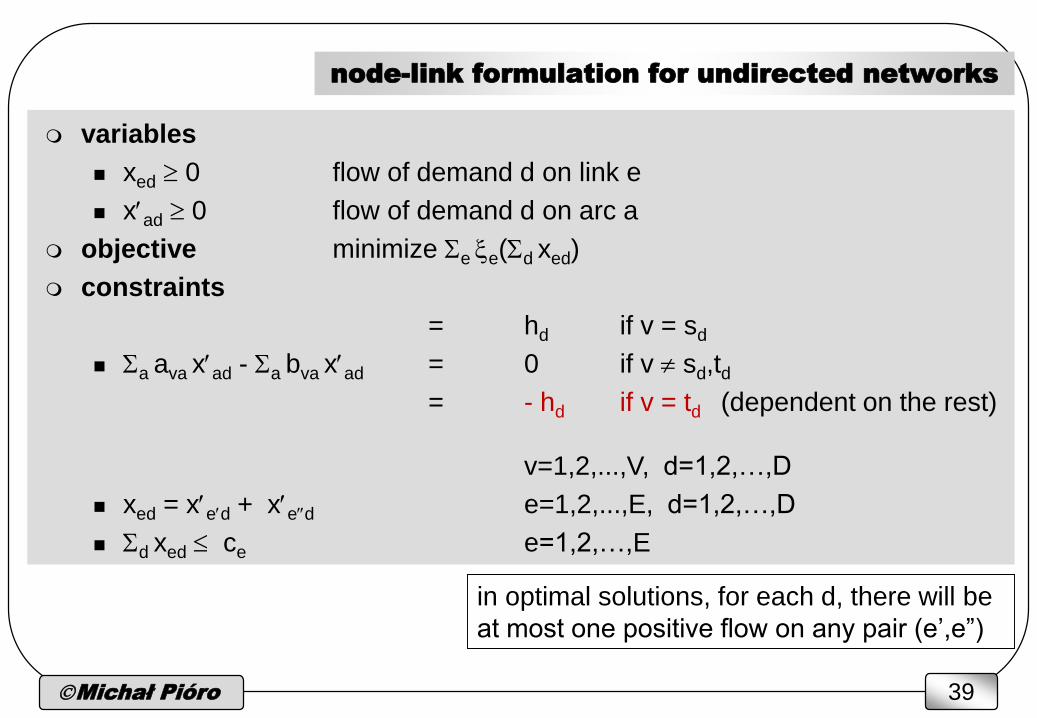
node-link formulation for undirected networks
variables
xed 0 flow of demand d on link e
xad 0 flow of demand d on arc a
objective minimize Se e(Sd xed)
constraints
= hd if v = sd
Sa ava xad - Sa bva xad = 0 if v sd,td
= - hd if v = td (dependent on the rest)
v=1,2,...,V, d=1,2,…,D
xed = xed + xed e=1,2,...,E, d=1,2,…,D
Sd xed ce e=1,2,…,E
in optimal solutions, for each d, there will be
at most one positive flow on any pair (e’,e”)
Michał Pióro 40
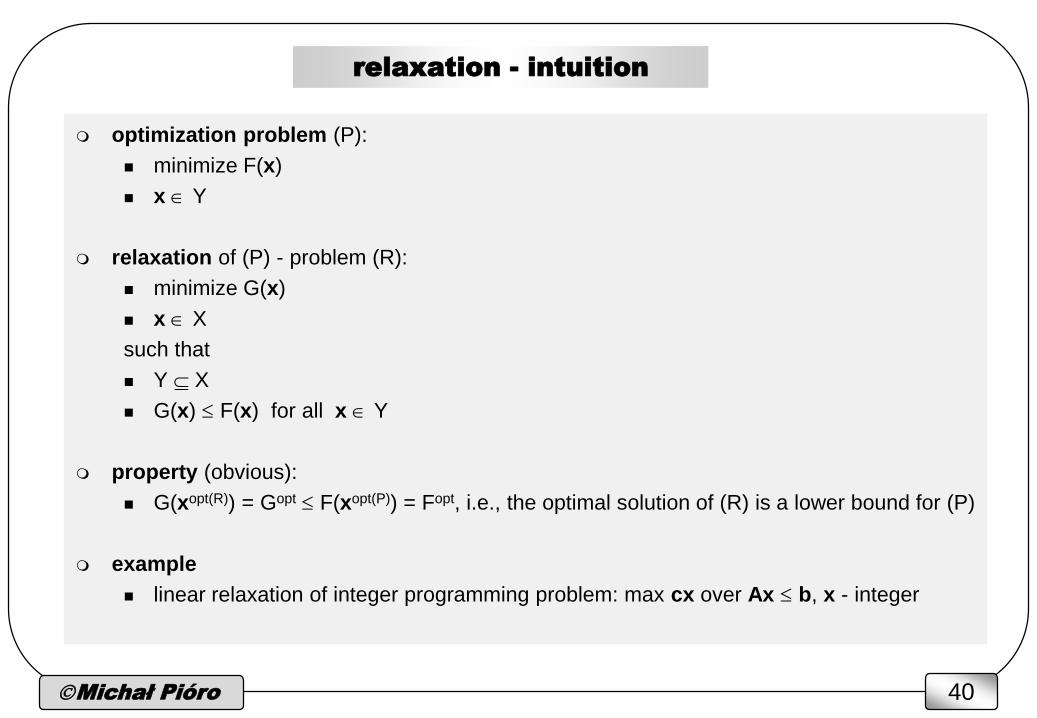
relaxation - intuition
optimization problem (P):
minimize F(x)
x Y
relaxation of (P) - problem (R):
minimize G(x)
x X
such that
Y X
G(x) F(x) for all x Y
property (obvious):
G(xopt(R)) = Gopt F(xopt(P)) = Fopt, i.e., the optimal solution of (R) is a lower bound for (P)
example
linear relaxation of integer programming problem: max cx over Ax b, x - integer

Michał Pióro 41
dual theory
Consider a programing problem (P):
minimize F(x)
subject to
hi(x) = 0 i=1,2,..,k
gj(x) 0 j=1,2,..,m set Y
x X
Form the Lagrangean function:
L(x; ,) = F(x) + i ihi(x) + j jgj(x)
x X, - unconstrained in sign, 0
Define the problem (R(,)):
minx X L(x; ,) this is a relaxation of (P)
Michał Pióro 42
why the dual is a relaxation?
Problem (R):
minimize G(x) = F(x) + i ihi(x) + j jgj(x) (, are given!)
subject to
x X
W(,) = Gopt
hence
Y X (trivially)
G(x) F(x) for all x Y (because j 0, and for all x Y, gj(x) 0 and hi(x) = 0)
and
W(,) F(xopt(P)) for all (,) Dom(W)

Michał Pióro 43
dual problem
Lagrangean function (one vector of primal variables and two vectors of dual
variables)
L(x; ,) = F(x) + i ihi(x) + j jgj(x)
x X, - unconstrained in sign, 0
Dual function:
W(,) = minx X L(x; ,)
- unconstrained in sign, 0
Dom(W) = {(,): - unconstrained in sign, 0, minx X L(x; ,) > - }
note that when X is compact then minx X L(x; ,) > -
Dual problem (D): finding the best relaxation of (P)
maximize W(,)
subject to (,) Dom(W)
Michał Pióro 44
duality – basic properties for general problems
property 1
W is concave, Dom(W) is convex, i.e., (D) is convex
property 2
x Y (, )Dom(W), W(,) ≤ F(x)
Michał Pióro 45
convex problems
convex poblem
X – convex set
F, gj – convex on X
hi – linear (!)
nice properties (in general hold only for convex problems)
every local optimum is the global optimum
the set of all optimal solutions is convex
If F is strictly convex then the optimal point is unique
strong duality theorem: x* (*,*), F(x*) = W(*,*) (global extrema)
additional properties
if both (P) and (D) are feasible then F(x*) = W(*,*)
(P) unbounded then (D) infeasible; (D) unbouded then (P) infeasible
Michał Pióro 47
FAP (dual variables)
variables
xdp flow realizing demand d on path p
z auxiliary variable
recall: lists of admissible paths are given
objective minimize z
constraints
Sp xdp = hd d=1,2,…,D (d - unconstrained)
Sd Sp edpxdp ce+ z e=1,2,…,E (e 0)
flow variables are continuous and non-negative, z is continuous

Michał Pióro 48
dual
L(x,z; ,) = z + Sd d(hd - Sp xdp) + Se e(Sd Sp edpxdp - ce- z)
xdp 0 for all (d,p)
W(,) = minx0,z L(x,z; ,)
Dual
maximize W(,) = Sd dhd - Se ece
subject to
Se e = 1
d Se edpe d=1,2,…,D p=1,2,...,Pd
e 0 e=1,2,...,E
for LP there is a receipt for formulating duals

Michał Pióro 49
path generation - the reason
dual
maximize Sd dhd - Se ece
subject to
Se e = 1
d Se edpe d=1,2,…,D p=1,2,...,Pd
e 0 e=1,2,...,E
if we can find a path shorter than d* then we will get a more
constrained dual problem and hence have a chance to improve
(decrease) the optimal dual objective
i.e., to decrease the optimal primal objective
shortest path algorithm can be used for finding shortest paths with
respect to *
Michał Pióro 50
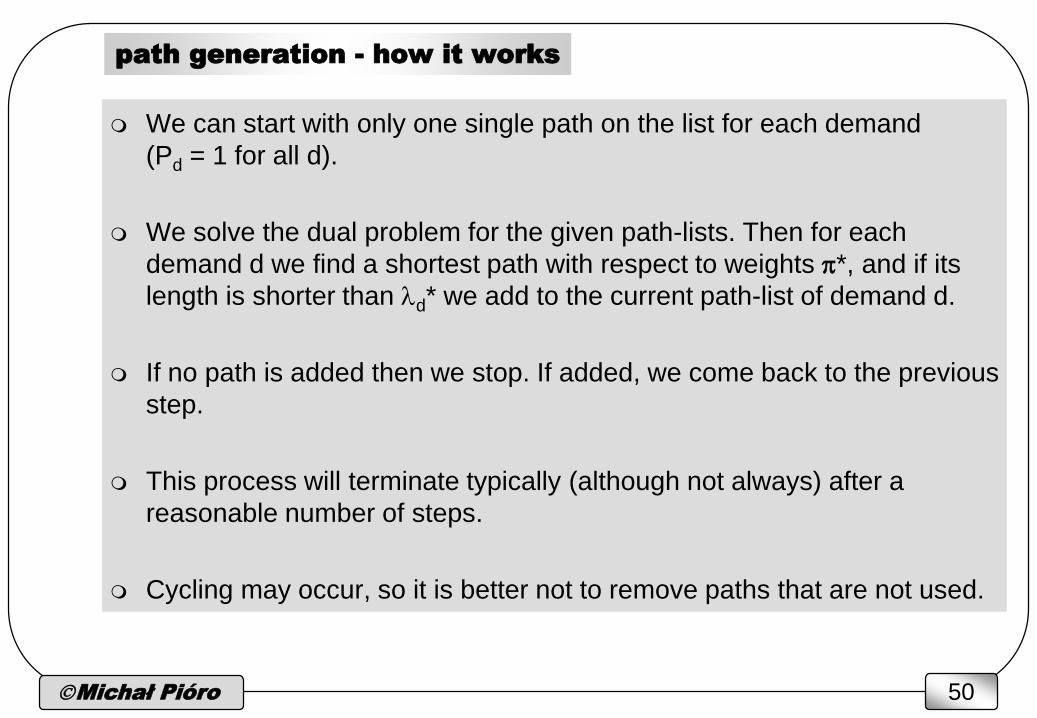
path generation - how it works
We can start with only one single path on the list for each demand
(Pd = 1 for all d).
We solve the dual problem for the given path-lists. Then for each
demand d we find a shortest path with respect to weights *, and if its
length is shorter than d* we add to the current path-list of demand d.
If no path is added then we stop. If added, we come back to the previous
step.
This process will terminate typically (although not always) after a
reasonable number of steps.
Cycling may occur, so it is better not to remove paths that are not used.
Michał Pióro 51
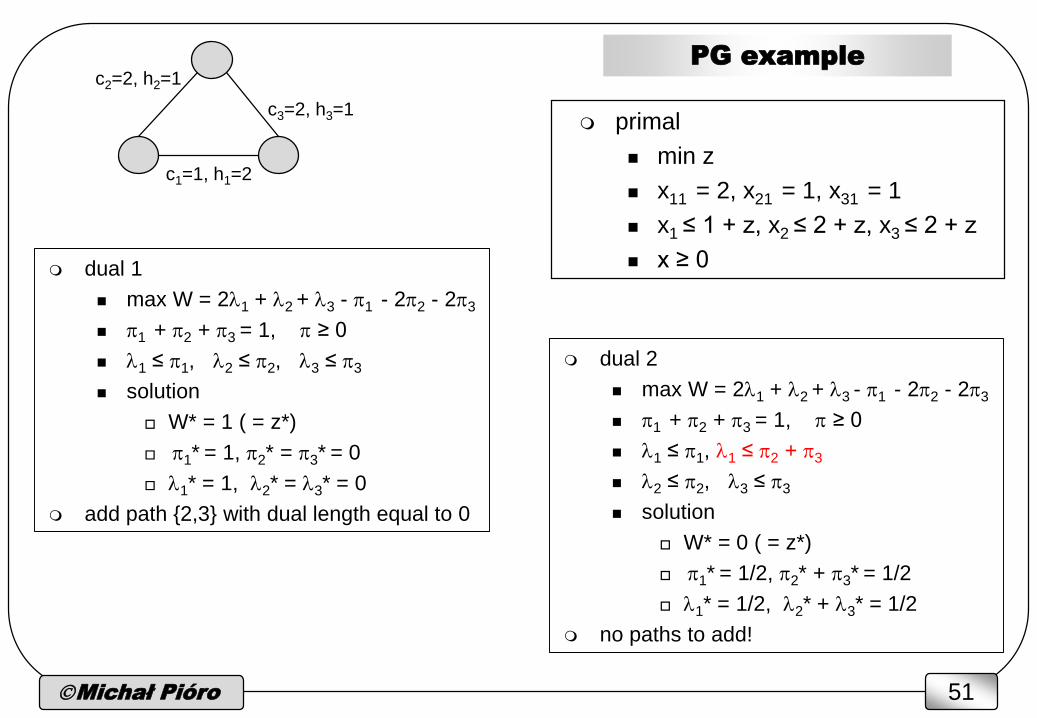
primal
min z
x11 = 2, x21 = 1, x31 = 1
x1 ≤ 1 + z, x2 ≤ 2 + z, x3 ≤ 2 + z
x ≥ 0
PG example
c3=2, h3=1
c1=1, h1=2
c2=2, h2=1
dual 1
max W = 21 + 2 + 3 - 1 - 22 - 23
1 + 2 + 3 = 1, ≥ 0
1 ≤ 1, 2 ≤ 2, 3 ≤ 3
solution
W* = 1 ( = z*)
1* = 1, 2* = 3* = 0
1* = 1, 2* = 3* = 0
add path {2,3} with dual length equal to 0
dual 2
max W = 21 + 2 + 3 - 1 - 22 - 23
1 + 2 + 3 = 1, ≥ 0
1 ≤ 1, 1 ≤ 2 + 3
2 ≤ 2, 3 ≤ 3
solution
W* = 0 ( = z*)
1* = 1/2, 2* + 3* = 1/2
1* = 1/2, 2* + 3* = 1/2
no paths to add!
Michał Pióro 52
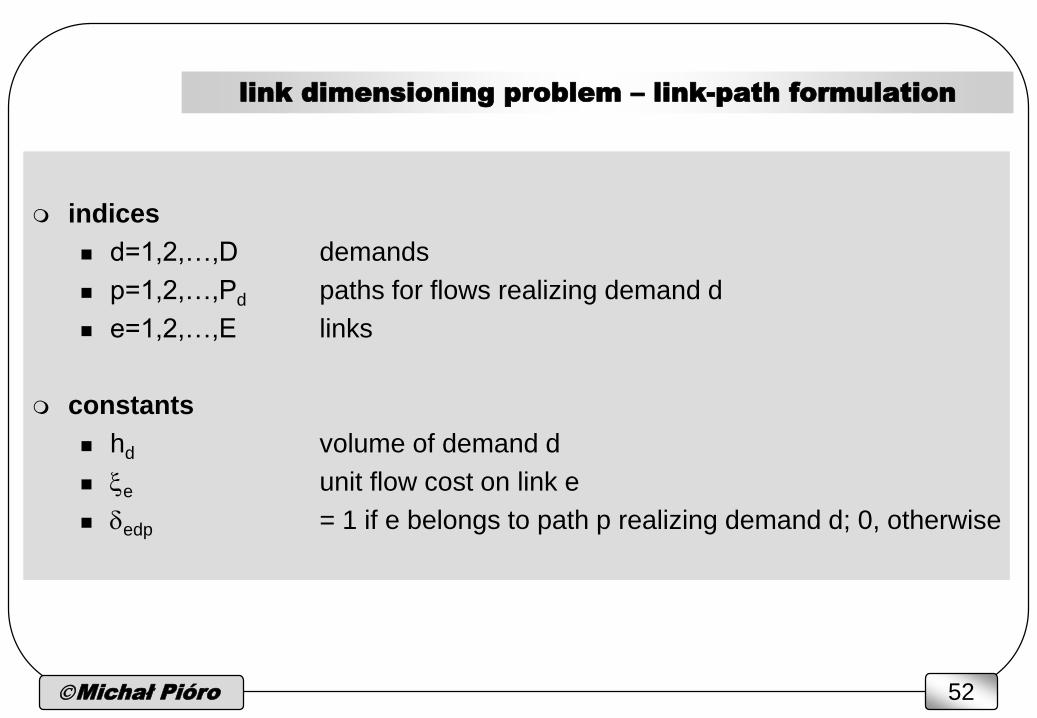
link dimensioning problem – link-path formulation
indices
d=1,2,…,D demands
p=1,2,…,Pd paths for flows realizing demand d
e=1,2,…,E links
constants
hd volume of demand d
e unit flow cost on link e
edp = 1 if e belongs to path p realizing demand d; 0, otherwise
Michał Pióro 53
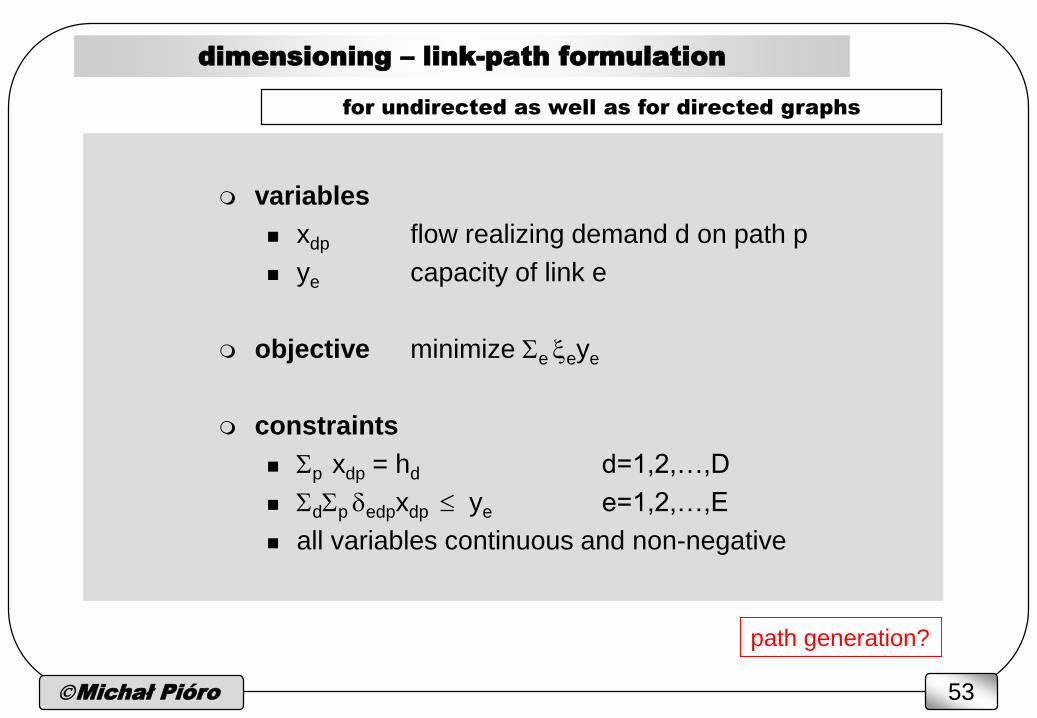
dimensioning – link-path formulation
variables
xdp flow realizing demand d on path p
ye capacity of link e
objective minimize Se eye
constraints
Sp xdp = hd d=1,2,…,D
SdSp edpxdp ye e=1,2,…,E
all variables continuous and non-negative
for undirected as well as for directed graphs
path generation?
Michał Pióro 54
path generation
note that in the link-path formulation the lists of candidate paths are
predefined
using of full lists is not realistic (exponential number of paths)
optimal dual multipliers e* associated with capacity constraints are
used to generate new shortest paths
the paths can be generated using Dijkstra (or some other shortest path
algorithm), e.g., with limited number of hops
path generation is related to column generation – a general method of
LP related to the revised Simplex method
Michał Pióro 55
duality in LP
primal dual
minimize z = cx maximize w = bu
subject to Ax = b, x 0 subject to ATu c
for LP in standard form with optimal basic matrix B:
u* = cBB-1
in fact: u* = - * D(D(P)) = P








![[CocoaHeads Tricity] Michał Zygar - Consuming API](https://img.pdfslide.us/doc/110x75/55cd2555bb61eb62068b45b5/cocoaheads-tricity-michal-zygar-consuming-api.jpg)














![[CocoaHeads Tricity] Michał Tuszyński - Modern iOS Apps](https://img.pdfslide.us/doc/110x75/55ce4b28bb61eb73088b4805/cocoaheads-tricity-michal-tuszynski-modern-ios-apps.jpg)





