Embed Size (px)
Citation preview
ECE5590: Model Predictive Control 7–1
MPC Performance Tuning
! MPC algorithms incorporate a number of adjustable designparameters that give enormous flexibility to the configuration of thecontrol system
! By delivering all this flexibility, they can also complicate the task ofcontroller tuning
! Among the degrees of freedom one can deploy in order to achievekey control objectives in MPC are the following:
– Horizons, Np, Nc
– Weights, Q, R
– Observer dynamics
– Reference trajectory
– Disturbance model
! The notion of tuning in MPC refers to the systematic adjustment ofproblem degrees of freedom with a view toward achieving desiredperformance outcomes
! Before addressing specific tuning guidelines, et’s first review somekey ideas related to stability and performance for control systems
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–2
The role of feedback
Feedback is used to overcome the effects of uncertainty
Feedback is dangerous
! It is well-known that introducing feedback brings with it the possibilityof destabilizing a stable system
! If the system model and environment are known perfectly, thenperfect control can be achieved using an open-loop control strategy
! But feedback can be very effective for reducing effects ofdisturbances and model uncertainty
– If our only objective was to follow a set-point well, then we don’tneed feedback - open-loop works fine!
! But we can deduce other information from set-point responses, so it’snot pointless to use them
Two-degree-of-freedom system
F (z) K(z)
H(z)
P (z)s r e u
d
n
y
+−
+
+
+
+Controller
Plant
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–3
! In the two-degree-of-freedom system, set-point s is filtered by apre-filter F.z/ before becoming reference r
! Controller has two parts: i) forward path controller K.z/; and ii)feedback path controller H.z/
! Output disturbance d and measurement noise n are also present
! We need to find transfer functions relating input signals s, d , and n, tooutput signals y and u
! For the general (vector-valued) case,
y.z/ D d.z/ C P.z/K.z/e.z/
e.z/ D F.z/s.z/ # H.z/ Œn.z/ C y.z/!
! This givesy.z/ D d.z/ C P.z/K.z/ fF.z/s.z/ # H.z/ Œn.z/ C y.z/!g
andŒI C P.z/K.z/H.z/! y.z/ D
d.z/ C P.z/K.z/F.z/s.z/ # P.z/K.z/H.z/n.z/
! We can express this result asy.z/ D S.z/d.z/ C S.z/P.z/K.z/F.z/s.z/ # T .z/n.z/
where we define the sensitivity function S.z/ and the complementarysensitivity function T .z/ as
S.z/ D ŒI C P.z/K.z/H.z/!#1
T .z/ D ŒI C P.z/K.z/H.z/!#1 P.z/K.z/H.z/
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–4
! In feedback theory, the smaller the sensitivity, the better the feedback,i.e., effect of d is kept small
! Likewise, the smaller the complementary sensitivity, the smaller theeffect of measurement noise n
! Note alsoS.z/ C T .z/ D I
which means you can’t have S.z/ and T .z/ small (near zero)simultaneously
! Note that the response of the output to the set-point can be designedindependantly via the pre-filter F.z/
! The MPC control problem considers tracking a reference subject toconstraints
– Although this looks straighforward mathematically in the algorithm,it’s not necessarily related to good feedback properties
– It is especially challenging to consider the effect of feedbackproperties under constraints - few analytical tools exist
Special Cases
! Here we consider some special choices of parameters and deducehow the predictive controller will behave
Mean-level control
! Choose Nc D 1 and R D 0.
! The cost function can be written,
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–5
J.k/ DNpXiD1
k Oy.k C i jk/ # rk2Q
! Since here we can only untilize one control move, 4u.k/, then ifNp ! 1, the optimal strategy is to move the control to that levelwhich will give y D r in the steady-state
! In this case, the transient response of the system will be theopen-loop response of the plant
! This is a common configuration for feedback systems; it also gives usa compatible form with which to describe the unconstrained modelpredictive controller formulation developed previously and shownbelow
Deadbeat control
! Let Nc D n , the number of states in the plant
! Assume R D 0; assume r.k C i/ D r , and choose Np $ 2n
! The cost function is then,
J.k/ D2nX
iDn
k Oy.k C i jk/ # rk2Q
’Perfect’ control
! Choose Np D 1 and Nc D 1 with R D 0
! The cost function is then,
J.k/ D k Oy.k C 1jk/ # r.k C 1/k2Q
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–6
! An optimal strategy in this case is to choose input signals so that thenext output matches the input reference as closely as possible. Thereis no concern about future steps.
! Consider the SISO transfer function case,
Y.z/ D G.z/U.z/ D B.z/
A.z/U.z/
! Writing as a difference equation,b0u.k/ D y.k C 1/ C : : : C any.k C 1 # n/ # b1u.k # 1/ # : : : # bnu.k # n/
! We can choose u.k/ such as to make y.k C 1/ D r.k C 1/ by settingb0u.k/ D r.kC1/Ca1y.k/C: : :Cany.kC1#n/#b1u.k#1/#: : :#bnu.k#n/
! If this is done at each step, we will eventually have
y.k/ D r.k/
y.k # 1/ D r.k # 1/
so that,b0u.k/ D r.kC1/Ca1r.k/C: : :Canr.kC1#n/#b1u.k#1/#: : :#bnu.k#n/
orB.z#1/u.k/ D A.z#1/r.k C 1/
! So, what we essentially have is a controller that is the inverse of theplant.
Example 7.1
! It will be instructive to examine an example to develop insight into theeffect various tuning parameters have on stability and performance
! Consider the system described by (Rossiter, Ch. 5.2)
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–7
Y.z/ D z#1 C 0:2z#2
.1 # 0:9z#1/.1 # 0:8z#1/U.z/
G.z/ D z#1 C 0:2z#2
1 # 1:7z#1 C 0:72z#2
D z C 0:2
z2 # 1:7z C 0:72
– The state space representation is
xm.k C 1/ D"
1:7 #0:72
1 0
#xm.k/ C
"1
0
#u.k/
y.k/ Dh
1 0:2i
xm.k/ C Œ0! u.k/
! Writing the augmented state vector,
x.k/ D"
4xm.k/
y.k/
#
– The state equations become
x.k C 1/ D"
4xm.k/
y.k/
#D
"Am 0t
m
CmAm 1
# "4xm.k/
y.k/
#
C"
Bm
CmBm
#4u.k/
y.k/ Dh
0m 1i "
4xm.k/
y.k/
#
which for our example this gives
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–8
A D
264
1:7 #0:72 0
1 0 0
1:9 #0:72 1
375 B D
264
1
0
1
375
C Dh
0 0 1i
! Note that the eigenvalues of A are ".A/ Dn
1:0 0:9 0:8o
.
! Using this example, we can systematically vary the parameters andexamine the effect on output response and control input.
! First we’ll examine the case where Nc D 1 and vary the predictionhorizon. The following plots depict the output, control input andcontrol input increment as functions of varying the prediction horizon.
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Sampling Instant
y[k]
Example 7.1 Np=1,2,3,5,10,20 Nc=1, R=1
Np=1Np=2Np=3Np=5Np=10Np=20
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–9
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
u[k]
Example 7.1 Np=1,2,3,5,10,20 Nc=1, R=1
Np=1Np=2Np=3Np=5Np=10Np=20
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
delu
[k]
Example 7.1 Np=1,2,3,5,10,20 Nc=1, R=1
Np=1Np=2Np=3Np=5Np=10Np=20
! Next, we’ll fix the prediction horizon at Np D 20 and vary the controlhorizon. Resulting plots follow.
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–10
5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Sampling Instant
y[k]
Example 7.1 Np=20, Nc=1,2,3,5,10,20, R=1
Nc=1Nc=2Nc=3Nc=5Nc=10Nc=20
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
u[k]
Example 7.1 Np=20, Nc=1,2,3,5,10,20, R=1
Nc=1Nc=2Nc=3Nc=5Nc=10Nc=20
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–11
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
delu
[k]
Example 7.1 Np=20 Nc=1,2,3,5,10,20 R=1
Nc=1Nc=2Nc=3Nc=5Nc=10Nc=20
! It appears from these plots that qualitative improvements in systemresponse are achieved for increasing values of the control horizon
! Setting the prediction horizon to a smaller value (Np D 3) gives thefollowing results.
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
Sampling Instant
y[k]
Example 7.1 Np=3 Nc=1,2,3 R=1
Nc=1Nc=2Nc=3
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–12
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
u[k]
Example 7.1 Np=3 Nc=1,2,3 R=1
Nc=1Nc=2Nc=3
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
delu
[k]
Example 7.1 Np=3 Nc=1,2,3 R=1
Nc=1Nc=2Nc=3
! Clearly, increasing Nc improves the response for small values of Np
! For comparison, we plot the deadbeat response (achieved by settingR D 0)
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–13
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
y[k]
Sampling Instant
Example 7.1 Deadbeat Control
! Now we’ll set Np D 10, Nc D 3 and vary the control incrementweighting
5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Sampling instant
y[k]
Example 7.1 Np=10 Nc=3 R=0.01, 0.1, 1, 10, 100
R=0.01R=0.1R=1R=10R=100
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–14
5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampiing Instant
u[k]
Example 7.1 Np=10 Nc=3 R=0.01, 0.1, 1, 10, 100
R=0.01R=0.1R=1R=10R=100
0 5 10 15 20 25−2
−1.5
−1
−0.5
0
0.5
1
Sampling Instant
delu
[k]
Example 7.1 Np=10 Nc=3 R=0.01, 0.1, 1, 10, 100
R=0.01R=0.1R=1R=10R=100
! It is apparent that lower values of control increment weighting allowlarger excursions in the control signal and bring about a fasterresponse
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli
ECE5590, MPC Performance Tuning 7–15
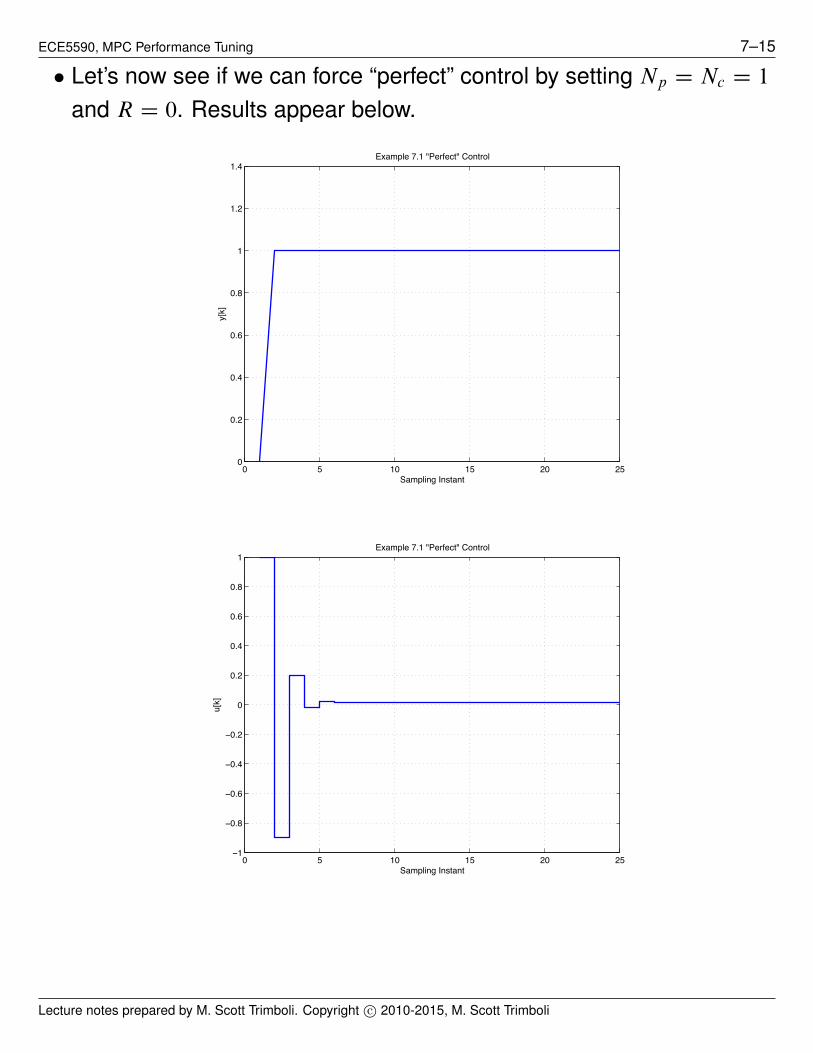
! Let’s now see if we can force “perfect” control by setting Np D Nc D 1
and R D 0. Results appear below.
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
Sampling Instant
y[k]
Example 7.1 "Perfect" Control
0 5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Sampling Instant
u[k]
Example 7.1 "Perfect" Control
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–16
0 5 10 15 20 25−2
−1.5
−1
−0.5
0
0.5
1
1.5
delu
[k]
Sampling Instant
Example 7.1 "Perfect" Control
! It looks like we’ve achieved the output objective in a single time step
– We can verify this result by solving the simultaneous set ofdifference equations
yŒk! D 1:7yŒk # 1! # 0:72yŒk # 2! C uŒk # 1! C 0:2uŒk # 2!
yŒ1! D 1:7 % yŒ0! # 0:72 % 0 C uŒ0! C 0:2 % 0 D 1
yŒ2! D 1:7 % yŒ1! # 0:72 % yŒ0! C uŒ1! C 0:2 % uŒ0! D 1
yŒ3! D 1:7 % yŒ2! # 0:72 % yŒ1! C uŒ2! C 0:2 % uŒ1! D 1::: ::: :::
– Note that this works here since G.z/ is proper (but not strictlyproper)
! Let’s state some general observations:
– If Nc is small, then increasing Np results in slower loop dynamics(approaches open-loop)
– If Nc is large, then increasing Np improves performance
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–17
– If Np is small, then increasing Nc can lead to near deadbeatbehavior
– Increasing control weighting R slows down the response
– Decreasing control weighting R speed up the response
! How do we choose horizons?
! Some guidelines:
– As Np is increased, nominal closed-loop performance improves ifNc is large enough
– As Nc is increased, nominal closed-loop performance improves ifNp is large enough
! For a well-posed optimization, Nc should be large and Np # Nc shouldbe greater than the system settling time
! How do we choose control weighting?
! Some guidelines:
– Greater control weighting generally means less active inputchanges
– Increasing weights indefinitely reduces control activity to zero -switching off feedback
– For large prediction horizons, it is possible to out-weigh controlwith error magnitude measure
! Considerations for open-loop unstable plants
– Large Np values in standard MPC design may cause performancedegradation for open-loop unstable plants
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–18
– Large Np values can cause ill-conditioning of the numericalcomputations for open-loop unstable plants
! In general (but not always) it is difficult to obtain acceptableperformance for Nc D 1
Systematic tuning strategies
! It is often tempting to pursue strategies that seek to ’optimize’ outputperformance in some meaningful way
! One example of this might be to measure the output error for varioustuning parameters and compare results
! For the following study, the system of Example 7.1 was used and thesum-of-squares of the output error for Np D 20 was computed andcompared for values of Nc D 1; 2; 3; 5; 10 and 20:
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 61
2
3
4
5
6
7
Nc Index
Squa
red
Out
put E
rror
Parametric Study: Nc
! A clear improvement is seen in moving from Nc D 1 to Nc D 2 . Onlymarginal improvements are seen with further increases in Nc.
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

ECE5590, MPC Performance Tuning 7–19
! The next study compares the same error criterion for Nc D 1 anddifferent values of Np.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 61
2
3
4
5
6
7
Np Index
Squa
red
Out
put E
rror
Example 7.1 Parametric Analysis: Np
! This result shows a rather clear minimum for Np D 2
Lecture notes prepared by M. Scott Trimboli. Copyright c" 2010-2015, M. Scott Trimboli

(mostly blank)