Embed Size (px)
Citation preview
Moving interface problems
for elliptic systems
John Strain
Mathematics Department
UC Berkeley
June 2010
1
ALGORITHMS
Implicit semi-Lagrangian contouring moves interfaces
– with arbitrary topology
– subject to stiff interface velocity
using
∗ implicit interface representation
∗ implicit stiffly-stable time discretization
Locally-corrected spectral methods find velocity from
– overdetermined first-order elliptic systems in bulk phases
– geometric boundary conditions on moving interfaces
using
∗ boundary integral equations
∗ generalized Ewald summation
∗ local correction formulas
∗ geometric nonuniform fast Fourier transforms
2
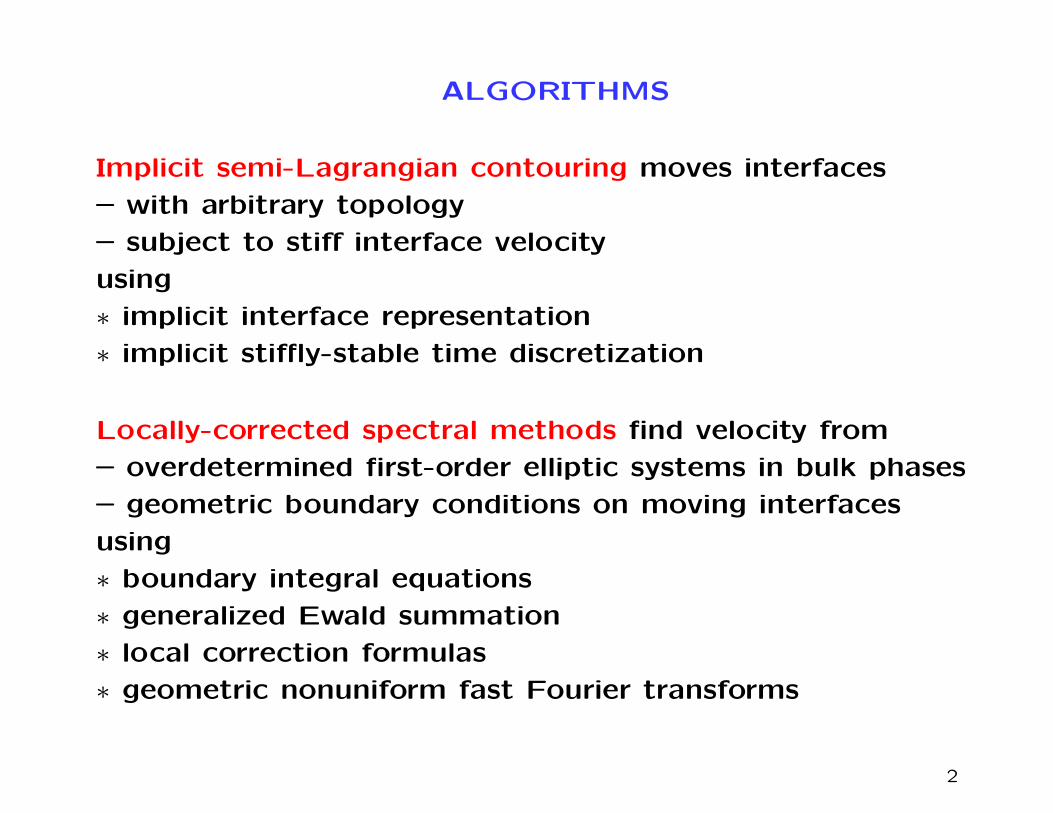
MOVING INTERFACES
Multiphase Stokes flow
−ν∆u+∇p = fΓδΓ
∇ · u = 0
V = u on Γ
V = S−1 (fΓδΓ)
Ostwald ripening
∆u = 0
u = C on Γ
V = [un]n on Γ
V = ΛΓC
3
STIFF INTERFACES
Normal velocity V on Γ(t) depends on
– material properties, experimental parameters, . . .
– interface geometry, topology, dynamics, . . .
Sensitive dependence produces stiff interfaces
Curvature flow
V = C
k = O(h2)
Ostwald ripening
V = ΛΓC
k = O(h3)
Surface diffusion
V = ∆ΓC
k = O(h4)
Computationally expensive dilemma
– explicit methods require tiny time steps
– implicit methods must solve nonlinear systems
4
IMPLICIT CONTOURING APPROACH
Represent interface Γ(t) implicitly as
zero set of signed distance function
d(x) = ± minγ∈Γ(t)
‖x− γ‖
Extend V (γ, t) to fictitious global velocity field W (x, t)
and transport values of d globally with velocity W
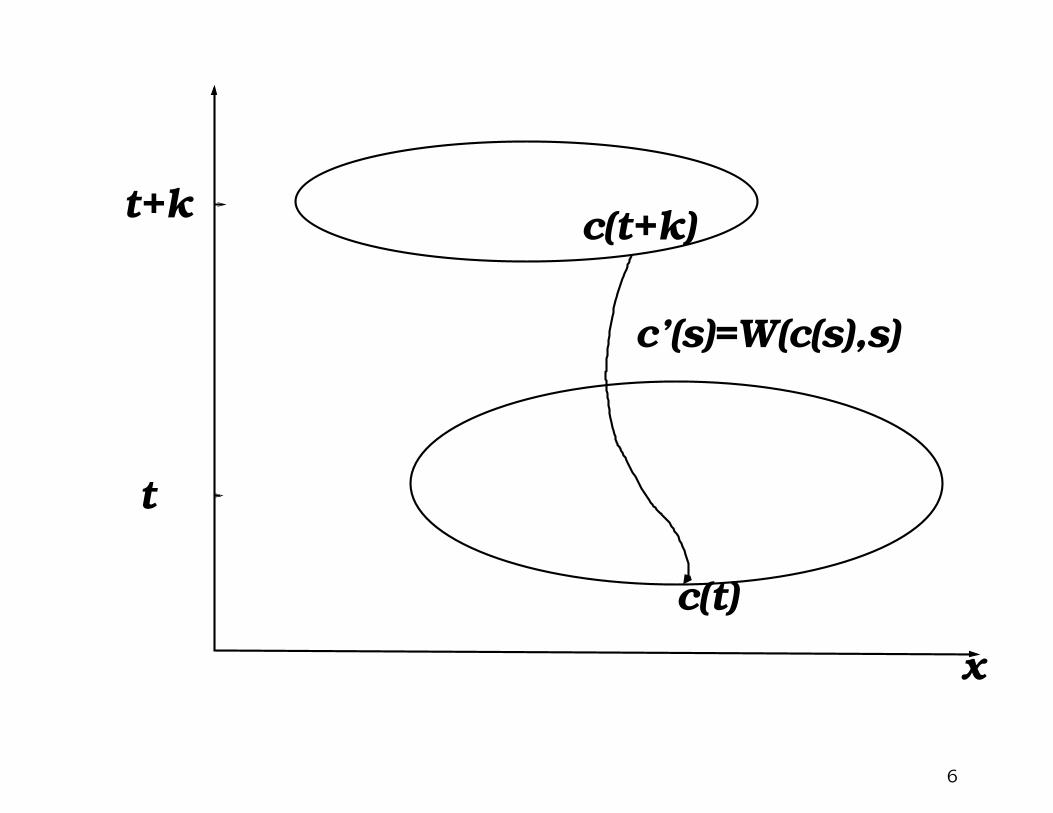
Contour: New interface Γ(t+ k) is zero set x|ϕ(x) = 0 of
ϕ(x) = d(x)
where x = c(t) is foot of backward characteristic
c(s) = W (c(s), s) entering x = c(t+ k) at time s = t+ k
5
c(t+k)
c(t)
x
c’(s)=W(c(s),s)
t+k
t
6
SEMI-LAGRANGIAN FORMULAS
Exact transported implicit representation is
ϕ(x) = d(c(t))
where c(t) is foot at time t of backward characteristic
c(s) = W (c(s), s) entering x = c(t+ k) at time s = t+ k
Explicit CIR scheme uses straight lines with old W
ϕ(x) = d(x− kW (x, t))
Implicit CIR solves functional equation
ϕ(x) = d(x− kW (x, t+ k))
for ϕ and unknown extended normal velocity
W (x, t+ k) = EϕVϕ(x)
Mesh-free functional approach ⇒ Only resolve interface
7
IMPLICIT SLC
Solve implicit SLC equation
F (ϕ) := ϕ(x)− d(x− kW (x, t+ k)) = 0
with unknown extended interface velocity
W (x, t+ k) = EϕVϕ(x)
Update ϕ with damped Newton DF (ϕ)δϕ = −F (ϕ)
(I −D [d(x− kEϕVϕ(x)])δϕ(x) = d(x− kEϕVϕ(x))− ϕ(x)
ϕ← ϕ+ θδϕ
where θ ∈ [0,1] reduces ‖F (ϕ)‖
(With Ian Sammis, Mathematics, UC Davis)
8
FRECHET DERIVATIVES
Chain rule for Newton operator DF (g) composes
– Signed distance gradient ∇d(x− kEϕVϕ)
– Extension variation from nearest point γ ∈ Γ to x
DEϕV δϕ(x) = DγV ·(‖∇ϕ‖I + ‖γ − x‖D2ϕ
)−1‖γ − x‖∇δϕ(x)
– Interface velocity variation DVϕ composed of
* problem-independent geometric variations
Dn · δϕ =
(I −∇ϕ∇ϕT
‖∇ϕ‖2
)∇(δϕ)
‖∇ϕ‖
* problem-dependent elliptic system
9
EXAMPLES OF ELLIPTIC SYSTEMS
Poisson/Helmholtz/Yukawa/ . . .
∆u+ ωu = f
Stokes
−∆u+∇p = f, ∇ · u = 0
Low-frequency Maxwell
∇× E = −iω
cH ∇ · E = 4πρ
∇×H =iω
cE +
4π
cj ∇ ·H = 0
10
FIRST-ORDER SYSTEMS
Second-order system of partial differential equations∑ijl
aijkl∂i∂jvl +∑jl
bjkl∂jvl +∑l
cklvl = fk in Ω
∑l
αklvl +∑jl
βkjl∂jvl = gk on Γ = ∂Ω
equivalent to first-order system
Au =∑j
Aj∂ju+A0u = f in Ω
Bu = g on Γ
for vector u of v and first derivatives ∂jv
11
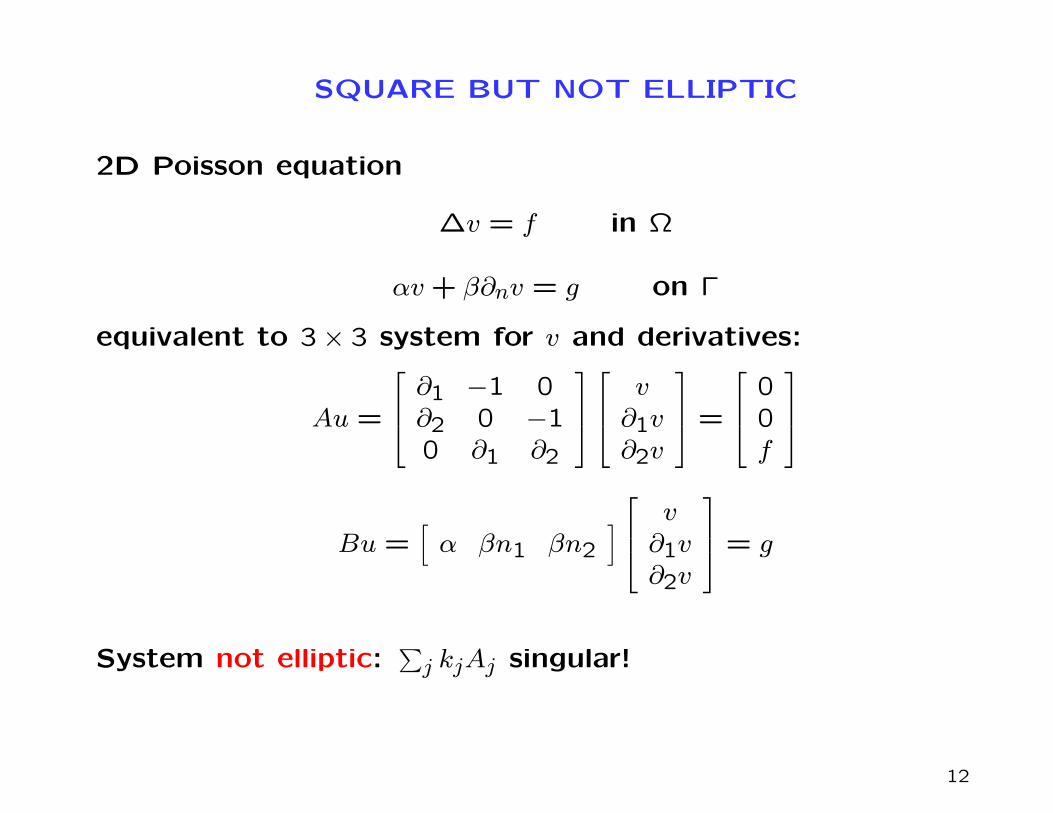
SQUARE BUT NOT ELLIPTIC
2D Poisson equation
∆v = f in Ω
αv + β∂nv = g on Γ
equivalent to 3× 3 system for v and derivatives:
Au =
∂1 −1 0∂2 0 −10 ∂1 ∂2
v∂1v∂2v
=
00f
Bu =[α βn1 βn2
] v∂1v∂2v
= g
System not elliptic:∑j kjAj singular!
12
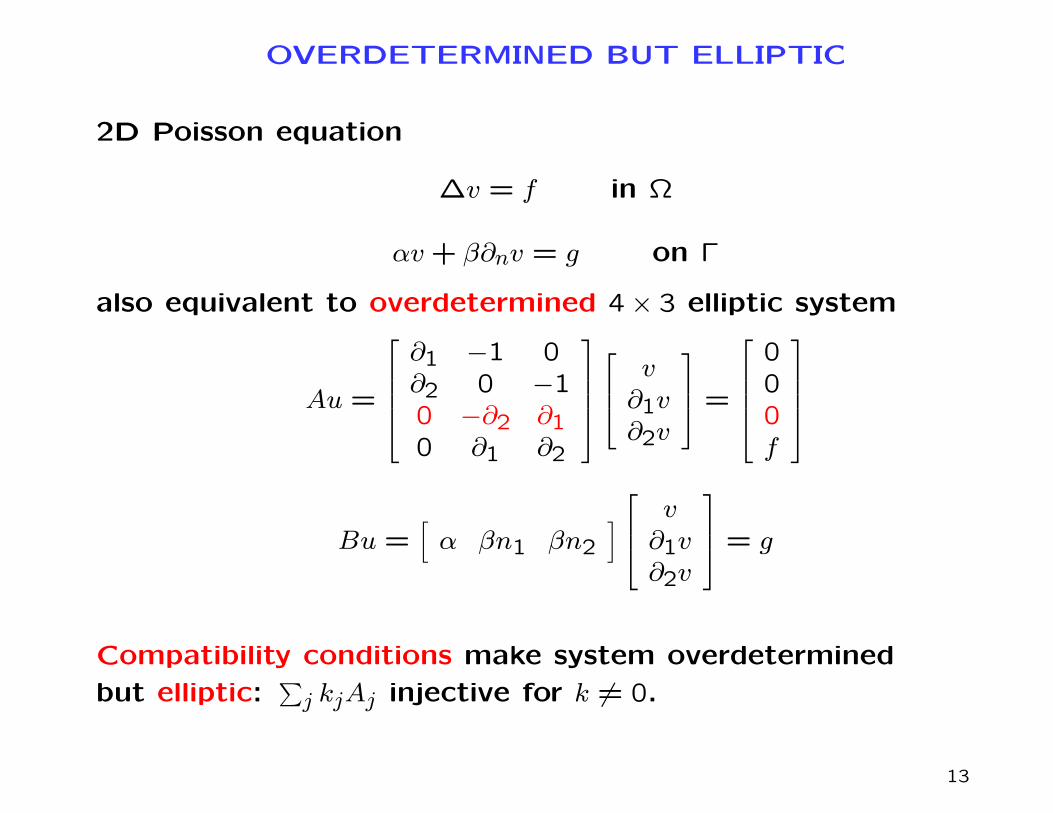
OVERDETERMINED BUT ELLIPTIC
2D Poisson equation
∆v = f in Ω
αv + β∂nv = g on Γ
also equivalent to overdetermined 4× 3 elliptic system
Au =
∂1 −1 0∂2 0 −10 −∂2 ∂10 ∂1 ∂2
v∂1v∂2v
=
000f
Bu =[α βn1 βn2
] v∂1v∂2v
= g
Compatibility conditions make system overdetermined
but elliptic:∑j kjAj injective for k 6= 0.
13
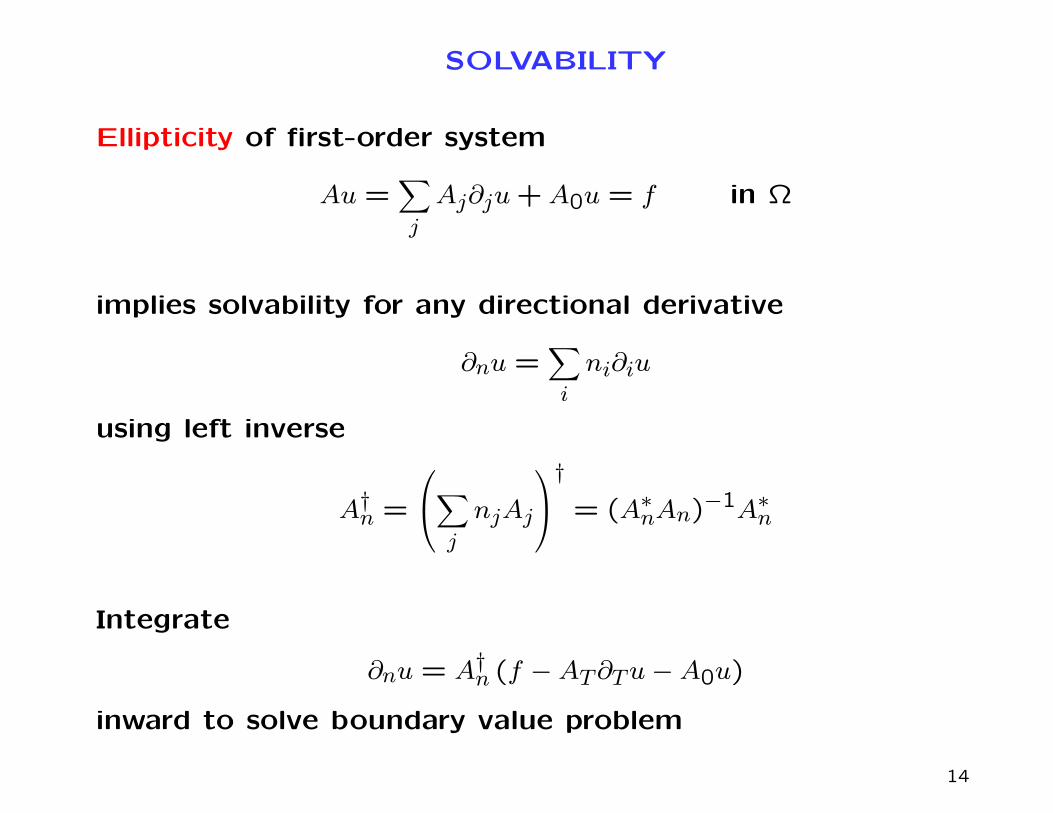
SOLVABILITY
Ellipticity of first-order system
Au =∑j
Aj∂ju+A0u = f in Ω
implies solvability for any directional derivative
∂nu =∑i
ni∂iu
using left inverse
A†n =
∑j
njAj
† = (A∗nAn)−1A∗n
Integrate
∂nu = A†n (f −AT∂Tu−A0u)
inward to solve boundary value problem
14
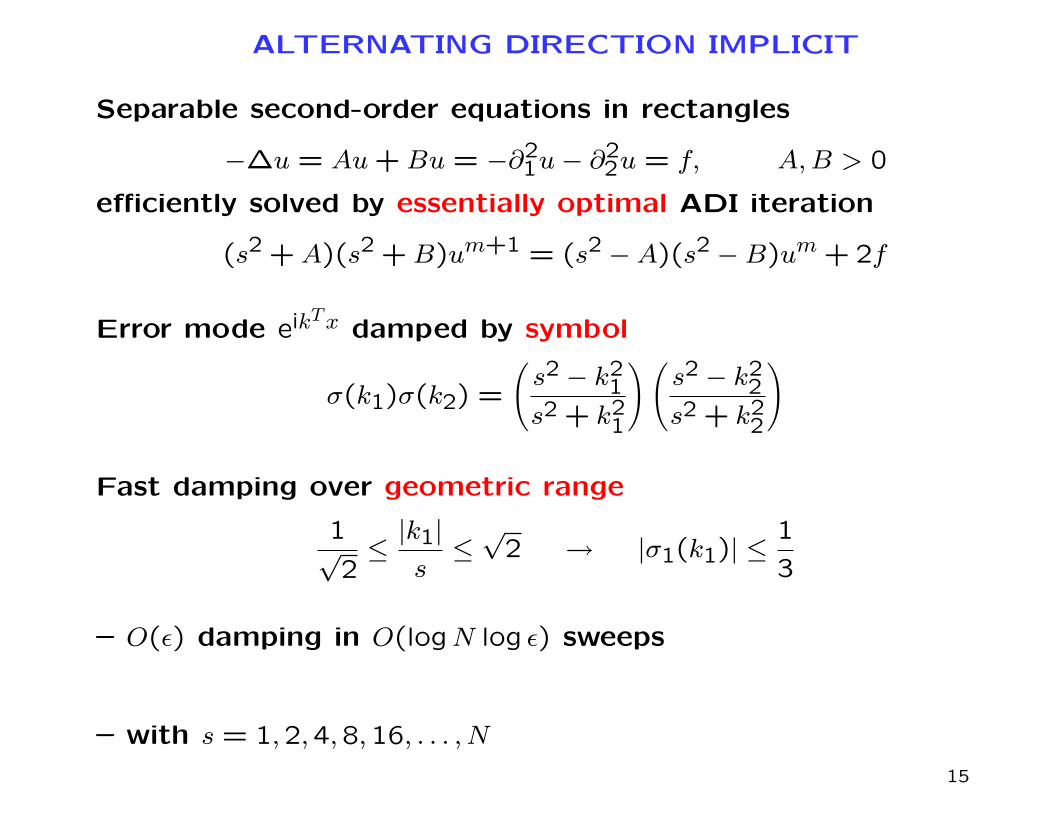
ALTERNATING DIRECTION IMPLICIT
Separable second-order equations in rectangles
−∆u = Au+Bu = −∂21u− ∂
22u = f, A,B > 0
efficiently solved by essentially optimal ADI iteration
(s2 +A)(s2 +B)um+1 = (s2 −A)(s2 −B)um + 2f
Error mode eikTx damped by symbol
σ(k1)σ(k2) =
(s2 − k2
1
s2 + k21
)(s2 − k2
2
s2 + k22
)
Fast damping over geometric range
1√2≤|k1|s≤√
2 → |σ1(k1)| ≤1
3
– O(ε) damping in O(logN log ε) sweeps
– with s = 1,2,4,8,16, . . . , N
15
ADI FOR SYSTEMS
Choose sweep direction n∑j
Aj∂ju =∑ij
Ai(ninj + δij − ninj)∂ju = An∂nu+AT∂Tu
Left-invert An and shift by 1/length scale s:
su+ ∂nu+B0u = su+ f −BT∂Tu
Error mode eikTxI damped by matrix symbol
ρ(k) =∏n
(s+ ikn +B0)−1 (s− iBTkT )
Damping factors 0.5, 0.1, 0.005 with 4, 8, 16 sweep directions
16
POTENTIAL THEORY
Given fundamental solution G = Gx of adjoint system
−∂1GA1 − ∂2GA2 +GA0 = δxI in box Q ⊃ Ω
Gauss theorem ∫Ω∂j(GAju
)dx =
∫ΓnjGAjudγ
implies boundary integral equation
1
2u(γ) +
∫ΓGγ(σ)An(σ)u(σ) dσ =
∫ΩGγ(y)f(y) dy on Γ
where An(γ) =∑nj(γ)Aj
17
PROJECTED INTEGRAL EQUATION
Project out boundary condition Bu = g with P (γ) = I −B∗B
Solve well-conditioned square system
1
2µ(γ) +
∫ΓP (γ)Gγ(σ)An(σ)µ(σ)dσ = ρ(γ)
for projected unknown µ = Pu with data
ρ(γ) = P (γ)∫
ΩGγ(y)f(y) dy + P (γ)
∫ΓGγ(σ)An(σ)B∗g(σ) dσ
Recover u = µ+B∗g on Γ and
u(x) =∫
ΩGx(y)f(y) dy +
∫ΓGx(σ)An(σ)u(σ) dσ in Ω
Need fast algorithm for Gγ(σ)
18
FUNDAMENTAL SOLUTION IN A BOX
Fourier series in box enclosing Γ gives fundamental solution
Gx(y) =∑k∈Zd
e−ikTxs(k)−1a∗(k)eikTy
where s = a∗a is positive definite Hermitian matrix and
a(k) = id∑
j=1
kjAj +A0
Filter with e−τs for exponentially fast convergence:
Gx(y) =∑‖k‖≤N
e−ikTxe−τs(k)s(k)−1a∗(k)eikTy
up to O(e−τN2) truncation error and O(τ) local error
19
GENERALIZED EWALD SUMMATION
Fundamental solution is smooth rapidly-converging series
Gτ(x) =∑
e−τs(k)s(k)−1a∗(k)e−ikTx
plus local asymptotic error expansion
Eτ = (I − e−τS)S−1A∗ =
(τ −
τ2
2!S +
τ3
3!S2 − · · ·
)A∗
with local differential operators A∗ and S = A∗A
Implies many local correction methods
for Laplace, Helmholtz, Stokes, . . .
Also effective for volume and layer potentials
20
HIGHER-ORDER GAUSS THEOREM
Gauss theorem differentiates indicator function ω(x) of set Ω:∫Ω∂judx =
∫Γnjudγ ⇔ ∂jω = njδΓ
Geometry in second-order derivatives
∂j∂kω(x) = (∂jnk)δΓ + njnk∂nδΓ
Volume potential of discontinuous function fω splits:∫ΩGx(y)f(y) dy = B(fω) = BF (fω) +BL(fω)
Local correction BL satisfies product rule:
BL(fω)(x) = τ
(A∗f(x))ω(x)−∑j
A∗jf(x)nj(x)δΓ(x)
+O(τ2)
21
SPECTRAL INTEGRAL EQUATION
Fourier series for fundamental solution separates variables
Gr(x− y) =∑
e−ikTxe−τs(k)s(k)−1a∗(k)eikTy
Converts integral equation to semi-separated form(1
2−MRT
)µ(γ) = ρ(γ)
Solve in Fourier space by identity(1
2−MRT
)−1= 2 + 2MR
(1
2− TMR
)−1T
– Tρ computes Fourier coefficients of (Anρ)δΓ– R applies filtered inverse of elliptic operator in Fourier space
– M evaluates and projects Fourier series on Γ
Compresses system and boundary conditions to matrix
(TMR)kq =∫
ΓAn(σ)P (σ)e−i(k−q)Tσ dσ e−τs(q)s(q)−1a∗(q)
22
NONUNIFORM FFT
Standard FFT works on uniform equidistant mesh
Nonuniform FFT works on arbitrary point sources:
– smooth point sources into Gaussians
– evaluate Gaussians on uniform mesh
– compute Fourier coefficients by FFT
– divide out smoothing of each coefficient
Integral operator and density ρ require Fourier coefficients
of soup of piecewise polynomials Pq on simplices Tq
(points, segments, triangles, tetrahedra, . . . )
f(k) =∑q
∫Tq
eikTxPq(x) dx
Similar to semiconductor mask computations
23
GEOMETRIC NONUNIFORM FFT
Geometric NUFFT evaluates Fourier coefficients of
soup in arbitrary dimension and codimension
Follow model of NUFFT for point sources, but
– integrating Gaussians over simplices intractable,
so smooth with piecewise-polynomial B-spline kernels
– then evaluate smoothed distributions on uniform mesh,
– apply standard FFT,
– unsmooth with guaranteed error bounds
Exact quadrature: split simplices between uniform
grid cells where smoothing kernels are polynomial
(With Ian Sammis, Mathematics, UC Davis)
24
WORK IN PROGRESS
Stabilize stiff moving interfaces with
– fast approximate Jacobians from boundary integral equation
– exponentially fitted time stepping methods
Extract explicit highest-derivative terms
in Frechet derivative of
u = B∗g +(
1
2−MRT
)−1ρ
= B∗g +
(2 + 2MR
(1
2− TMR
)−1T
) (PΩf +MRTB∗g
)≈ B∗g + (2 +MRT )
(PΩf +MRTB∗g
)where g depends on geometry of interface
Ostwald ripening of a perturbed linear interface
has V ≈ HD3 where H is Hilbert transform
25
![Elliptic genera and elliptic cohomology - Long Island Universitymyweb.liu.edu/~dredden/EllipticGenera.pdf · the history of elliptic genera and elliptic cohomology, [Seg] explains](https://img.pdfslide.us/doc/110x75/5edc8698ad6a402d66673899/elliptic-genera-and-elliptic-cohomology-long-island-dreddenellipticgenerapdf.jpg)















![Numerical Methods for Parabolic-Elliptic Interface Problemstuprints.ulb.tu-darmstadt.de/8609/1/2019_05_25_Schorr_Dissertation_Final.pdf · in [JN80]. This was later extended by MacCamy](https://img.pdfslide.us/doc/110x75/5e1e6f93efd3f81d7f096da8/numerical-methods-for-parabolic-elliptic-interface-in-jn80-this-was-later-extended.jpg)