Embed Size (px)
Citation preview

Motivation•Many GOES products are not directly used in NWP but may help in diagnosing problems in forecasted fields.
•One example is the GOES cloud classification product run at NESDIS that includes a new multi-layer cloud detection scheme.
•Validation with RADAR/LIDAR has demonstrated the high skill of satellites to detect multiple cloud layers under many conditions.
•Knowledge of the presence of multiple cloud layers is important to interpreting satellite data properly and in the ability to compute radiative fluxes.
•During GOES-R, we expect great improvements in the accuracy and temporal resolution of this information.
•Through the JCSDA, NESDIS and NCEP are working on meaningful ways to compare satellite derived and forecasted cloud fields. This is one example.
Motivation
Dr Andrew HeidingerNOAA/NESDIS Office of Research and Applications1225 Dayton StreetMadison, WI 53706ph. 608-263-6757email: [email protected]
Using GOES-R to Diagnose NWP: Multi-layer CloudsAndrew Heidinger, Michael Pavolonis* and Dan Tarpley
NOAA/NESDIS, Office of Research and Applications*UW/CIMSS, Madison, WI
1
References•Pavolonis, Michael J., A. K. Heidinger, 2004: Daytime Cloud Overlap Detection from AVHRR and VIIRS. J. Applied. Meteor.., 43, 5, 762--778
•Heidinger, A. K., 2003: Rapid Day-time Estimation of Cloud Properties over a Large Area from Radiance Distributions, J. Atmos. Ocean. Tech., 20, 1237-1250
•Heidinger, A. K., M. J. Pavolonis, 2004: Global Daytime Distribution of Multi-layer Cloud, submitted to Journal of Climate
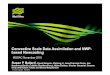
Algorithm DescriptionThe detection of multi-layer cloud is the detection of clouds that do not behave radiatively as single layer clouds.
The current algorithm uses the 0.6 micron reflectance with the split window brightness temperature difference (T11-T12). Basically, as illustrated in the figure below, as single layer clouds become brighter, the T11- T12 should decrease. Multi-layer clouds can be detected by looking for deviations from this behavior.
Low Level Water Cloud
High Level Ice CloudCirrus over water cloud (tau=10)
Threshold function
•On GOES-R, use of the 1.38 and 8.5 micron channel will offer more capability.
•On GOES-12, the 11- 6.7 micron difference is used in place of the 11 – 12 micron difference. (requires TPW knowledge)
•Nighttime detection is also possible using 3.9, 11 and 12 micron.
EXAMPLE APPLICATION
These images show an example of the multi-layer cloud detection applied to the GOES-10 Imager. The multi-layer cloud detection is part of a larger cloud typing algorithm using the cloud type definitions used in the NESDIS Clouds from AVHRR (CLAVR-x) system
APPLICATION TO THE ADVANCED BASELINE IMAGERMODIS provides today comparable channels to what ABI will provide on GOES-R. As this example using MODIS data during a tropical cyclone in the Indian Ocean shows, the GOES-R algorithm detects more multi-layer cloud (orange) and is generally better at detecting thin cirrus (red). The current algorithm often classifies thin cirrus as water cloud (blue)
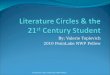
COMPARISON TO NWPThe images below show a comparison of the number of cloud layers from a 12 hour forecast by the NCEP GFS model (valid at March 28, 2004 0Z). The number of cloud layers were computed by looking for clear layers in the cloud mixing ratio profiles. Multiple cloud layers were ignored when the total column cloud liquid water path was less than 0.05 kg/m^2 because this situation would not be detected as multi-layer cloud by GOES.
The GOES imager data from GOES-10 full disk scans were processed through the NESDIS GOES Solar Insolation Project (GSIP-fd) with a spatial resolution of 0.125 degree. The GOES results were spatially averaged to the model resolution and show the fraction of all pixels that were classified as multi-layer cloud.
Fraction of GFS grid points with multiple cloud layers where GOES detected at least 10% multi-layer cloud = 52%
Fraction of GFS grid points without multiple cloud layers where GOES detected more than 10% multi-layer cloud = 18%
Fraction of GOES cells with more than 10% multi-layer cloud where GFS had less than 2 cloud layers = 65%
Conclusions• GOES cloud products continue to evolve and offer new aids in diagnosing NWP performance.
•The GOES multi-layer cloud product provides insight into the vertical structure of forecast cloud fields. It shows some similar features but also some significant differences in the distribution of multi-layer cloud
•Work is ongoing to develop meaningful comparisons between satellite derived and forecasted cloud fields.
2
3
6
57
RGB FROM MODIS CLOUD TYPE USING“GOES-R”
CLOUD TYPE USING“GOES-10”
GFS 12hr FORECAST GOES-10
Comparison with surface based RADAR/LIDAR at ARM sites revealed:
• when single layer cloud is present, the average occurrence of overlap was only 3% (false alarm rate)
•The amount of cirrus overlap detected was larger in the strong than the weak radar-derived overlap scenes. Jay Mace’s Figure
ALGORITHM VALIDATION 4Example case of strong overlap from ARM data