Embed Size (px)
Citation preview
MotionPart 4: Projectile Motion
Last modified: 28/03/2017
CONTENTS
Projectile MotionUniform Motion EquationsProjectile Motion EquationsTrajectoryHow to Approach Problems
Example 1Example 2Example 3
Rotational MotionAngular SpeedAngular Velocity: Definition
Example 1Tangential Velocity
Examples 2 & 3AccelerationCentripetal Acceleration
Example 4Constant Angular Acceleration
Example 5Summary
Uniform Motion Equations Contents
In the last lecture we saw the equations of uniform motion (i.e. whereacceleration a is constant), which connect the time t, displacement s,initial and final velocities u and v:
v = u + at
s = ut + 12at2
v 2 = u2 + 2a · s
In that lecture we looked at applying these formulas to linear motion (i.e.motion in one dimension only).
The next type of problem we will look at, is that of projectile motion -motion in two dimensions with the acceleration due to gravity.
Projectile Motion Equations Contents
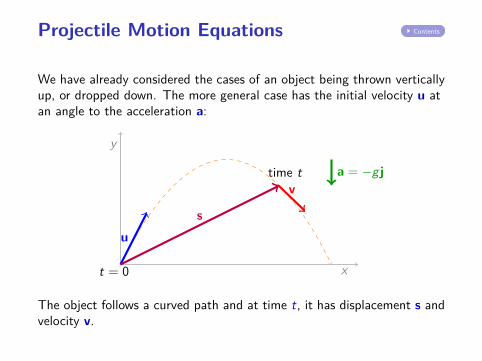
We have already considered the cases of an object being thrown verticallyup, or dropped down. The more general case has the initial velocity u atan angle to the acceleration a:
y
xt = 0
time t
us
va = −g j
The object follows a curved path and at time t, it has displacement s andvelocity v.
Contents
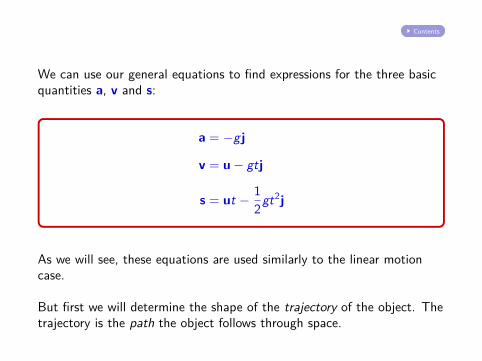
We can use our general equations to find expressions for the three basicquantities a, v and s:
a = −g j
v = u− gtj
s = ut − 12 gt2j
As we will see, these equations are used similarly to the linear motioncase.
But first we will determine the shape of the trajectory of the object. Thetrajectory is the path the object follows through space.
Trajectory Contents
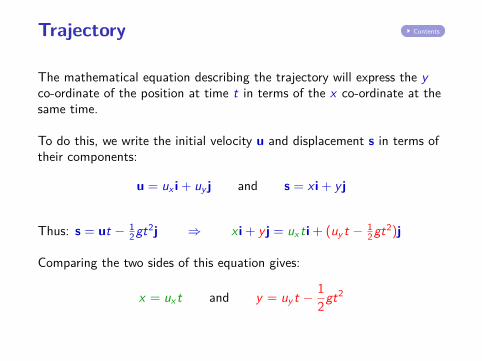
The mathematical equation describing the trajectory will express the yco-ordinate of the position at time t in terms of the x co-ordinate at thesame time.
To do this, we write the initial velocity u and displacement s in terms oftheir components:
u = ux i + uy j and s = x i + y j
Thus: s = ut − 12 gt2j ⇒ x i + y j = ux ti + (uy t − 1
2 gt2)j
Comparing the two sides of this equation gives:
x = ux t and y = uy t − 12 gt2
Contents
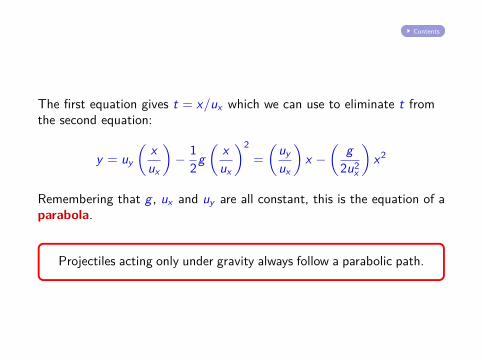
The first equation gives t = x/ux which we can use to eliminate t fromthe second equation:
y = uy
(xux
)− 1
2 g(
xux
)2=
(uyux
)x −
(g
2u2x
)x2
Remembering that g , ux and uy are all constant, this is the equation of aparabola.
Projectiles acting only under gravity always follow a parabolic path.
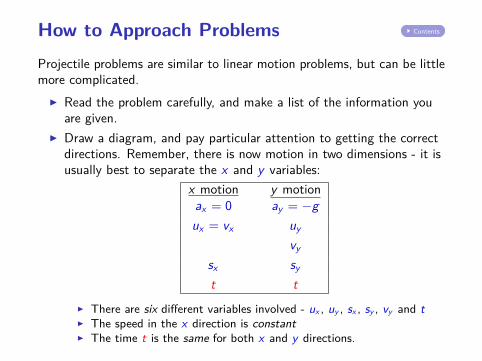
How to Approach Problems Contents
Projectile problems are similar to linear motion problems, but can be littlemore complicated.
I Read the problem carefully, and make a list of the information youare given.
I Draw a diagram, and pay particular attention to getting the correctdirections. Remember, there is now motion in two dimensions - it isusually best to separate the x and y variables:
x motion y motionax = 0 ay = −gux = vx uy
vy
sx sy
t tI There are six different variables involved - ux , uy , sx , sy , vy and tI The speed in the x direction is constantI The time t is the same for both x and y directions.
Contents
I From here the calculation usually requires two steps :(i) Use the information about one direction to calculate the time t using
the one-dimensional equations.(ii) Use this calculated value together with the information about the
other direction to calculate the required quantity.
Because of this two-step process and the large of number of variables youneed to keep track of, it is very easy to get mixed-up.
It is very important to be organized and methodical in these calculations.
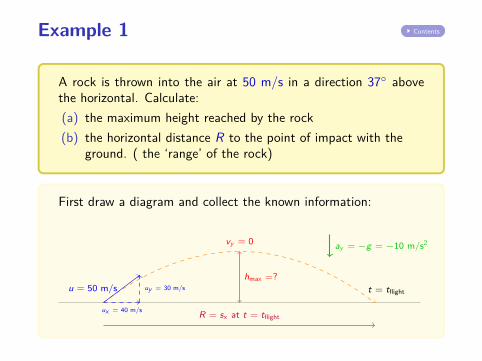
Example 1 Contents
A rock is thrown into the air at 50 m/s in a direction 37◦ abovethe horizontal. Calculate:(a) the maximum height reached by the rock(b) the horizontal distance R to the point of impact with the
ground. ( the ‘range’ of the rock)
First draw a diagram and collect the known information:
u = 50 m/s
ay = −g = −10 m/s2
ux = 40 m/s
uy = 30 m/shmax =?
vy = 0
R = sx at t = tflight
t = tflight
Contents
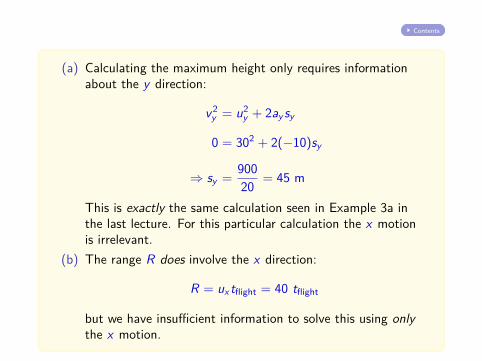
(a) Calculating the maximum height only requires informationabout the y direction:
v 2y = u2
y + 2ay sy
0 = 302 + 2(−10)sy
⇒ sy = 90020 = 45 m
This is exactly the same calculation seen in Example 3a inthe last lecture. For this particular calculation the x motionis irrelevant.
(b) The range R does involve the x direction:
R = ux tflight = 40 tflight
but we have insufficient information to solve this using onlythe x motion.
Contents
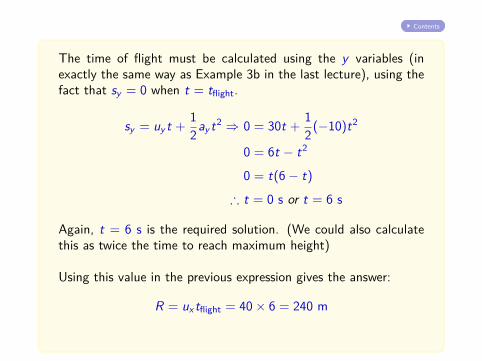
The time of flight must be calculated using the y variables (inexactly the same way as Example 3b in the last lecture), using thefact that sy = 0 when t = tflight.
sy = uy t + 12 ay t2 ⇒ 0 = 30t + 1
2 (−10)t2
0 = 6t − t2
0 = t(6− t)
∴ t = 0 s or t = 6 s
Again, t = 6 s is the required solution. (We could also calculatethis as twice the time to reach maximum height)
Using this value in the previous expression gives the answer:
R = ux tflight = 40× 6 = 240 m
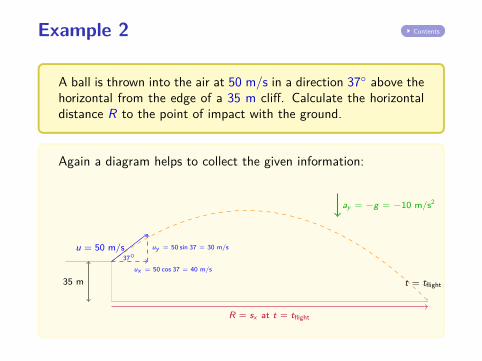
Example 2 Contents
A ball is thrown into the air at 50 m/s in a direction 37◦ above thehorizontal from the edge of a 35 m cliff. Calculate the horizontaldistance R to the point of impact with the ground.
Again a diagram helps to collect the given information:
u = 50 m/s
ay = −g = −10 m/s2
ux = 50 cos 37 = 40 m/s
uy = 50 sin 37 = 30 m/s37◦
R = sx at t = tflight
t = tflight35 m
Contents
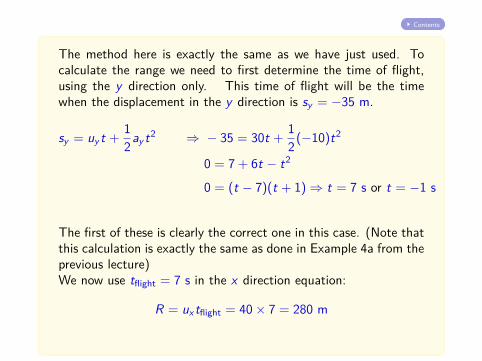
The method here is exactly the same as we have just used. Tocalculate the range we need to first determine the time of flight,using the y direction only. This time of flight will be the timewhen the displacement in the y direction is sy = −35 m.
sy = uy t + 12 ay t2 ⇒ − 35 = 30t + 1
2 (−10)t2
0 = 7 + 6t − t2
0 = (t − 7)(t + 1)⇒ t = 7 s or t = −1 s
The first of these is clearly the correct one in this case. (Note thatthis calculation is exactly the same as done in Example 4a from theprevious lecture)We now use tflight = 7 s in the x direction equation:
R = ux tflight = 40× 7 = 280 m
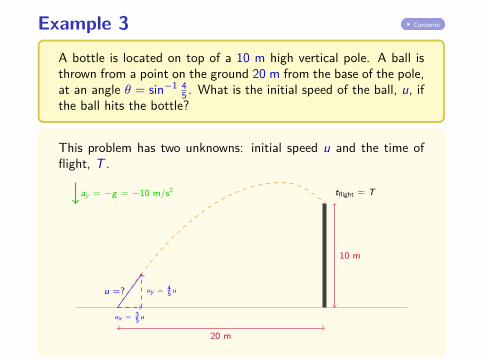
Example 3 Contents
A bottle is located on top of a 10 m high vertical pole. A ball isthrown from a point on the ground 20 m from the base of the pole,at an angle θ = sin−1 4
5 . What is the initial speed of the ball, u, ifthe ball hits the bottle?
This problem has two unknowns: initial speed u and the time offlight, T .
u =?
ay = −g = −10 m/s2
ux = 35 u
uy = 45 u
20 m
10 m
tflight = T
Contents
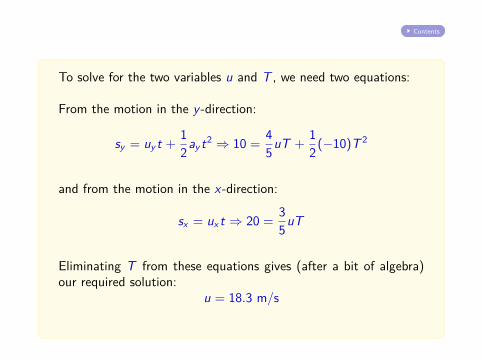
To solve for the two variables u and T , we need two equations:
From the motion in the y -direction:
sy = uy t + 12 ay t2 ⇒ 10 = 4
5 uT + 12 (−10)T 2
and from the motion in the x -direction:
sx = ux t ⇒ 20 = 35 uT
Eliminating T from these equations gives (after a bit of algebra)our required solution:
u = 18.3 m/s
MotionPart 5: Rotational Motion
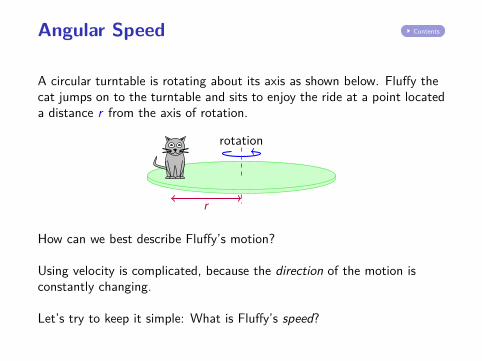
Angular Speed Contents
A circular turntable is rotating about its axis as shown below. Fluffy thecat jumps on to the turntable and sits to enjoy the ride at a point locateda distance r from the axis of rotation.
r
rotation
How can we best describe Fluffy’s motion?
Using velocity is complicated, because the direction of the motion isconstantly changing.
Let’s try to keep it simple: What is Fluffy’s speed?
Contents
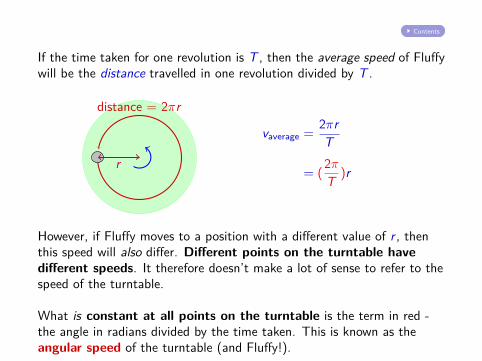
If the time taken for one revolution is T , then the average speed of Fluffywill be the distance travelled in one revolution divided by T .
distance = 2πr
r
vaverage = 2πrT
= ( 2πT )r
However, if Fluffy moves to a position with a different value of r , thenthis speed will also differ. Different points on the turntable havedifferent speeds. It therefore doesn’t make a lot of sense to refer to thespeed of the turntable.
What is constant at all points on the turntable is the term in red -the angle in radians divided by the time taken. This is known as theangular speed of the turntable (and Fluffy!).
Angular Velocity: Definition Contents
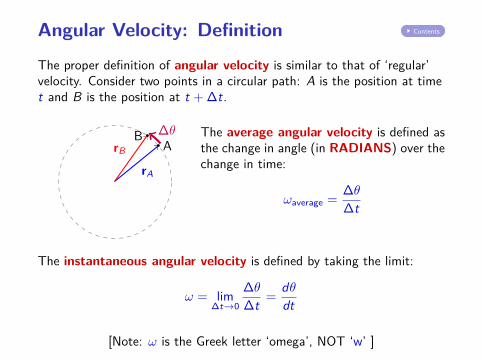
The proper definition of angular velocity is similar to that of ‘regular’velocity. Consider two points in a circular path: A is the position at timet and B is the position at t + ∆t.
rA
rB AB ∆θ The average angular velocity is defined as
the change in angle (in RADIANS) over thechange in time:
ωaverage = ∆θ∆t
The instantaneous angular velocity is defined by taking the limit:
ω = lim∆t→0
∆θ∆t = dθ
dt
[Note: ω is the Greek letter ‘omega’, NOT ‘w’ ]
Contents
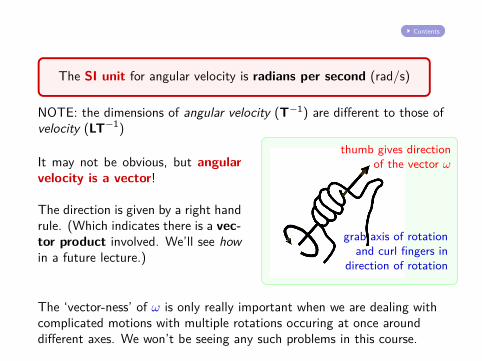
The SI unit for angular velocity is radians per second (rad/s)
NOTE: the dimensions of angular velocity (T−1) are different to those ofvelocity (LT−1)
It may not be obvious, but angularvelocity is a vector!
The direction is given by a right handrule. (Which indicates there is a vec-tor product involved. We’ll see howin a future lecture.)
grab axis of rotationand curl fingers in
direction of rotation
thumb gives directionof the vector ω
The ‘vector-ness’ of ω is only really important when we are dealing withcomplicated motions with multiple rotations occuring at once arounddifferent axes. We won’t be seeing any such problems in this course.
Example 1 Contents
Vinyl records are usually played at speeds of 33 13 or 45 rpm. What
are these angular speeds in SI units?
‘Revolutions per Minute’ (rpm for short) is a commonly usednon-SI unit for angular velocity. If we need to calculate with thesevalues, we must first convert to the SI unit: radians/second.
This is simple if we realize: 1 revolution = 2π radians, and ofcourse 1 minute = 60 seconds.
Therefore:33 1
3 rpm = 1003 × 2π
60 = 3.5 rad/s
and45 rpm = 45× 2π
60 = 4.7 rad/s
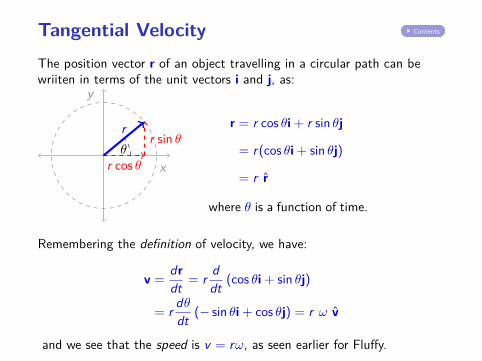
Tangential Velocity Contents
The position vector r of an object travelling in a circular path can bewriiten in terms of the unit vectors i and j, as:
y
xr cos θ
r sin θrθ
r = r cos θi + r sin θj
= r(cos θi + sin θj)
= r r̂
where θ is a function of time.
Remembering the definition of velocity, we have:
v = drdt = r d
dt (cos θi + sin θj)
= r dθdt (− sin θi + cos θj) = r ω v̂
and we see that the speed is v = rω, as seen earlier for Fluffy.
Contents
What is the direction of v?
Using the 2 expressions on the previous page:
r · v = {r(cos θi + sin θj)} · {rω(− sin θi + cos θj)}
= r 2 ω (− cos θ sin θ + sin θ cos θ)
= 0
The velocity vector v is perpendicular to the position vector r, i.e. thevelocity vector is tangent to the circular path. For this reason v isknown as the tangential velocity.
In fact, for any motion, the instantaneous velocity vector is alwaystangent to the trajectory.
Examples 2 & 3 Contents
An ant is sitting at a distance of 12 cm from the centre of aturntable rotating at a constant 33 1
3 rpm. What is this ant’s tan-gential speed?
From earlier, we know: 33 13 rpm = 3.5 rad/s, so:
v = rω = 0.12× 3.5 = 0.42 m/s
At what distance from the centre of the turntable would the ant’sspeed be 0.15 m/s?
r = vω
= 0.153.5 = 0.043 m = 4.3 cm
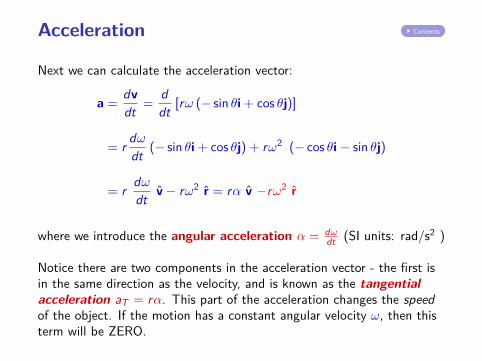
Acceleration Contents
Next we can calculate the acceleration vector:
a = dvdt = d
dt [rω (− sin θi + cos θj)]
= r dωdt (− sin θi + cos θj) + rω2 (− cos θi− sin θj)
= r dωdt v̂− rω2 r̂ = rα v̂ −rω2 r̂
where we introduce the angular acceleration α = dωdt (SI units: rad/s2 )
Notice there are two components in the acceleration vector - the first isin the same direction as the velocity, and is known as the tangentialacceleration aT = rα. This part of the acceleration changes the speedof the object. If the motion has a constant angular velocity ω, then thisterm will be ZERO.
Centripetal Acceleration Contents
The second component of the acceleration vector is the really importantone:
−rω2 r̂
The direction is opposite to r, i.e. towards the center of the circle.
Called the centripetal acceleration ac , this is what is keeping the objectin the circular path - it doesn’t change speed, only the direction ofmotion.
No centripetal acceleration ⇒ No circular motion.
Remembering that speed v = rω:
ac = rω2 = v 2
r
Example 4 Contents
For the ant at r = 12 cm on the 33 13 rpm turntable, what are the
ant’s (a) tangential acceleration, and (b) centripetal acceleration?
(a) We are told the turntable is rotating at a constant angularspeed. Constant = no change = 0 tangential acceleration.
(b) We know both ω and v , so there are two equivalent ways tocalculate ac :
ac = ω2r = (3.5)2 × 0.12 = 1.46 m/s2
orac = v 2/r = (0.42)2/0.12 = 1.46 m/s2
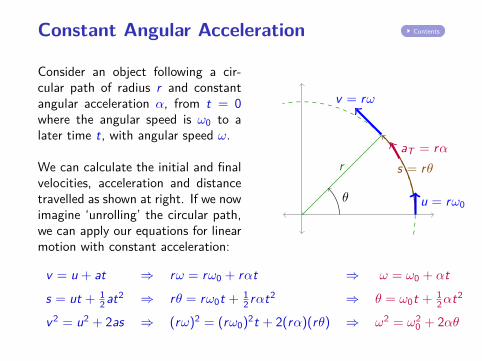
Constant Angular Acceleration Contents
Consider an object following a cir-cular path of radius r and constantangular acceleration α, from t = 0where the angular speed is ω0 to alater time t, with angular speed ω.
We can calculate the initial and finalvelocities, acceleration and distancetravelled as shown at right. If we nowimagine ‘unrolling’ the circular path,we can apply our equations for linearmotion with constant acceleration:
r s = rθ
θ
v = rω
u = rω0
aT = rα
v = u + at ⇒ rω = rω0 + rαt ⇒ ω = ω0 + αt
s = ut + 12 at2 ⇒ rθ = rω0t + 1
2 rαt2 ⇒ θ = ω0t + 12αt2
v 2 = u2 + 2as ⇒ (rω)2 = (rω0)2t + 2(rα)(rθ) ⇒ ω2 = ω20 + 2αθ
Contents
We can apply these equations in the same way as we did in the linearmotion examples seen previously.
Note that the rotational equations are the same as the ‘regular’equations, but with the substitutions v → ω, a→ α, s → θ.
This same idea will apply more generally, for example:
force F = ma ⇒ torque τ = Iαmomentum p = mv ⇒ angular momentum L = Iωkinetic energy KE = 1
2 mv 2 ⇒ rotational kinetic energy KE = 12 Iω2
. . .
where the ‘moment of inertia’ I is the rotational equivalent of mass.
We will briefly use the first of these later in the course.
Example 5 Contents
An ant is sitting at a distance of 12 cm from the centre of a sta-tionary turntable, which accelerates uniformly to an angular speedof 33 1
3 rpm in 0.5 s.(a) What is the ant’s angular acceleration?(b) Through what angle does the ant move in this 0.5 s interval?
(a) We know:
ω0 = 0, ω = 33 13 rpm = 3.5 rad/s and t = 0.5 s
so:
ω = ω0 + αt ⇒ α = (ω − ω0)/t = 3.5− 00.5 = 7.0 rad/s2
Contents
(b) We already knew: ω0 = 0, ω = 3.5 rad/s and t = 0.5 s.
We now also know: α = 7.0 rad/s2,
so similarly to previous examples we have a choice ofmethods to determine the angular displacement θ:
θ = ω0t + 12αt2 = 0 + 1
2 × 7.0× (0.5)2 = 0.875 rad
or
ω2 = ω20 + 2αθ ⇒ θ = ω2 − ω2
02α = 3.52 − 0
2× 7.0 = 0.875 rad
Of course, as we should expect, both methods give the sameresult.
Summary Contents
I Different points on a rotating object will have different values ofspeed and acceleration.
I All points will have the same values of angular velocity and angularacceleration.
Angular Speed: ω = dθdt Angular Acceleration: α = dω
dt
Tangential Speed: v = rω Tangential Acceleration: aT = rα
I Remember the word ‘tangential‘ is describing direction. Tangentialvelocity is a ‘proper’ velocity with dimensions LT−1 and units m/s.‘Angular velocity’ is a dimensionally different quantity, and is NOT avelocity.
I Similarly, while ‘tangential acceleration’ is a ‘proper’ acceleration,‘angular acceleration’ is dimensionally different.
Contents
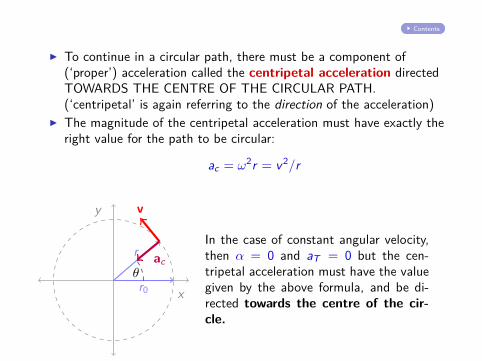
I To continue in a circular path, there must be a component of(‘proper’) acceleration called the centripetal acceleration directedTOWARDS THE CENTRE OF THE CIRCULAR PATH.(‘centripetal’ is again referring to the direction of the acceleration)
I The magnitude of the centripetal acceleration must have exactly theright value for the path to be circular:
ac = ω2r = v 2/r
y
x
v
r0
r acθ
In the case of constant angular velocity,then α = 0 and aT = 0 but the cen-tripetal acceleration must have the valuegiven by the above formula, and be di-rected towards the centre of the cir-cle.