Embed Size (px)
Citation preview
Schneider Electric – Motion & Drive
Motion & Drives
Prácticas ATV32

Schneider Electric – Motion & Drive
Agenda
Implementación de la seguridad de máquina centrifuga
Programación con ATV Logic
1.- Practicas
2.- arquitecturas de seguridad
Schneider Electric – Motion & Drive
Práctica 1Implementación de la seguridad de máquina centrifug a
Objetivos:Obtener una visión general de los requerimientos de seguridad de una
máquina y conocer las funciones específicas incorpo radas en el ATV32.
● Introducción.
● Seguridad Somove
● Funciones de seguridad.
● Implementación de seguridad de máquina
centrífuga.

Schneider Electric – Motion & Drive
Práctica 1 Funciones de seguridad
Para que se usa :● Se usa para detener una máquina en un tiempo corto, si el par o la fricción de la carga es
suficiente.● O cuando la rampa de parada del variador no tiene ninguna relevancia para la seguridad.
● Función STO (Safe Torque OFF).Suprime el par aplicado al motor de forma segura, permitiendo realizar una parada de máquina cumpliendo con Categoría de parada 0 de EN 60204-1.
● Se activa con la entrada dedicada Power Removal, con 2 entradas lógicas, o con PWR + 1 entrada lógica
● Mientras esté activa no es posible volver a dar marcha al equipo
Schneider Electric – Motion & Drive
Práctica 1 Funciones de seguridad
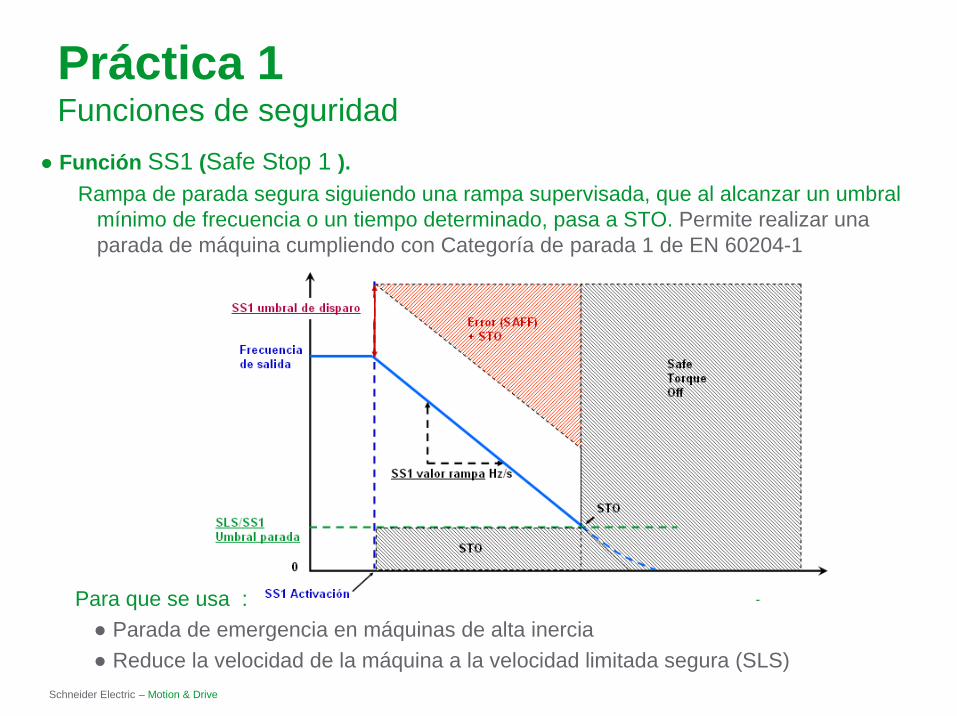
● Función SS1 (Safe Stop 1 ).Rampa de parada segura siguiendo una rampa supervisada, que al alcanzar un umbral
mínimo de frecuencia o un tiempo determinado, pasa a STO. Permite realizar una parada de máquina cumpliendo con Categoría de parada 1 de EN 60204-1
Para que se usa :
● Parada de emergencia en máquinas de alta inercia
● Reduce la velocidad de la máquina a la velocidad limitada segura (SLS)
Schneider Electric – Motion & Drive
Práctica 1 Funciones de seguridad
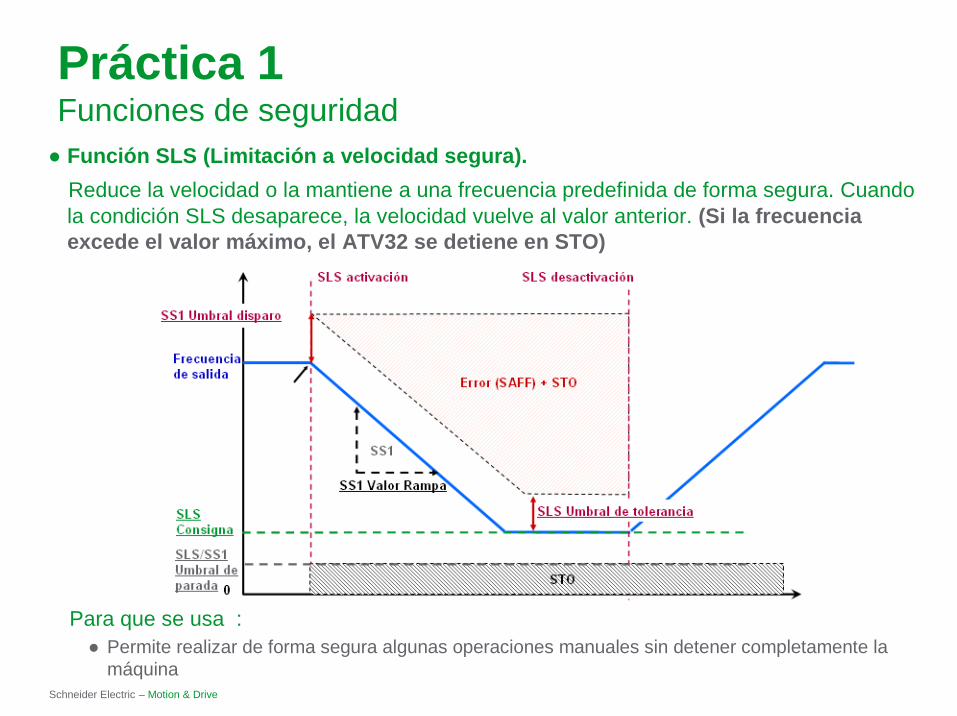
Para que se usa :● Permite realizar de forma segura algunas operaciones manuales sin detener completamente la
máquina
● Función SLS (Limitación a velocidad segura).
Reduce la velocidad o la mantiene a una frecuencia predefinida de forma segura. Cuando la condición SLS desaparece, la velocidad vuelve al valor anterior. (Si la frecuencia excede el valor máximo, el ATV32 se detiene en STO)
Schneider Electric – Motion & Drive
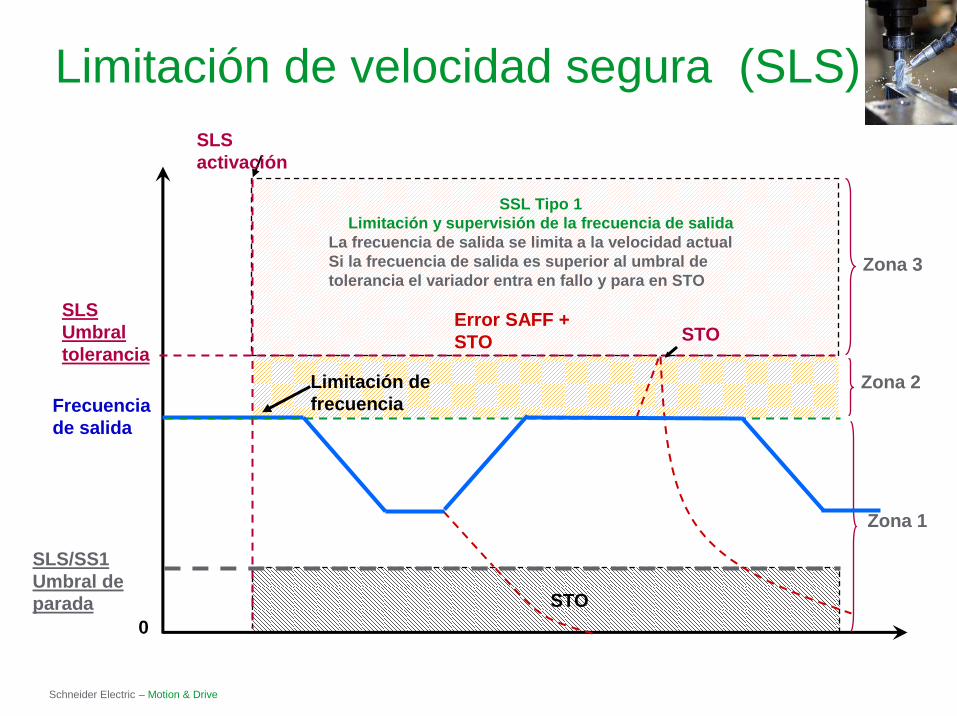
STO
Limitación de velocidad segura (SLS)
Frecuencia de salida
SLS Umbral tolerancia
Zona 3
Zona 2
Zona 1
SSL Tipo 1Limitación y supervisión de la frecuencia de salida
La frecuencia de salida se limita a la velocidad ac tualSi la frecuencia de salida es superior al umbral de tolerancia el variador entra en fallo y para en STO
0
SLS/SS1 Umbral de parada
SLS activación
STO
Limitación de frecuencia
Error SAFF + STO

Schneider Electric – Motion & Drive
STO
Limitación de velocidad segura (SLS)
Frecuencia de salida
SLS Umbral de tolerancia
Zona 3
Zona 2
Zona 1
SSL Tipo 2Comportamiento según frecuencia de salida antes de activación SLS -
Desde zona 2-3 SLS decelera en modo SS1, se mantiene a la vel. de consigna
- Desde zona 1 SLS funciona en modo de limitación de f recuencia
0
SLS/SS1 Umbral de parada
SLS activación
SLS Consigna
SS1 Error + STO

Schneider Electric – Motion & Drive
STO
Frecuencia de salida
SLS Umbral de tolerancia
Zona 3
Zona 2
Zona 1
SSL Tipo 3Comportamiento según frecuencia de salida antes de activación SLS– Desde zona 3 SLS decelera en modo SS1 y finalmente para en STO- Desde zona 2 decelera en modo SS1 y se mantiene en e l valor de consigna- Desde zona 1 SLS permanece en modo de limitación de frecuencia
0
SLS/SS1 Umbral de parada
SLS activación
SS1
SLS Consigna
SS1
Error + STO
Limitación de velocidad segura (SLS)

Schneider Electric – Motion & Drive
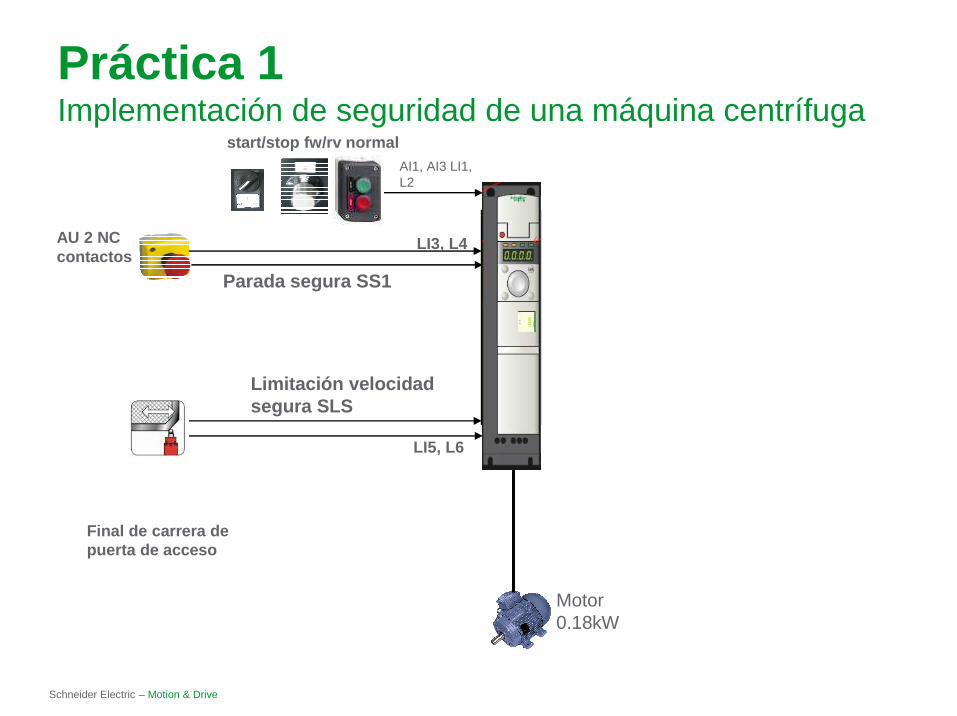
Práctica 1 Implementación de seguridad de una máquina centrífuga
start/stop fw/rv normal
AI1, LI1, LI2
Emergency stop SIL2
Low speed for service SIL2
● Se tiene que realizar una parada de emergencia SIL2 en una máquina centrífuga configurando el ATV32.● La máquina tiene que estar totalmente parada en un
tiempo máximo de 10 segundos, en caso de una parada de emergencia.
● Cuando la velocidad baje de 3 Hz el ATV32 le quitarápotencia al motor .
● Si se detecta una persona en el área de seguridad de la máquina, la velocidad descenderá hasta los 10 Hz. Si la velocidad sobrepasa la toleracia de +/- 5hz alrededor de la consigna, se le quitará potencia al motor para quepare por rueda libre.
Schneider Electric – Motion & Drive
Práctica 1 Implementación de seguridad de una máquina centrífuga
ATV32
Motor 0.18kW
Parada segura SS1
start/stop fw/rv normalAI1, AI3 LI1, L2
AU 2 NC contactos
LI3, L4
Limitación velocidad segura SLS
LI5, L6
Final de carrera de puerta de acceso
Schneider Electric – Motion & Drive
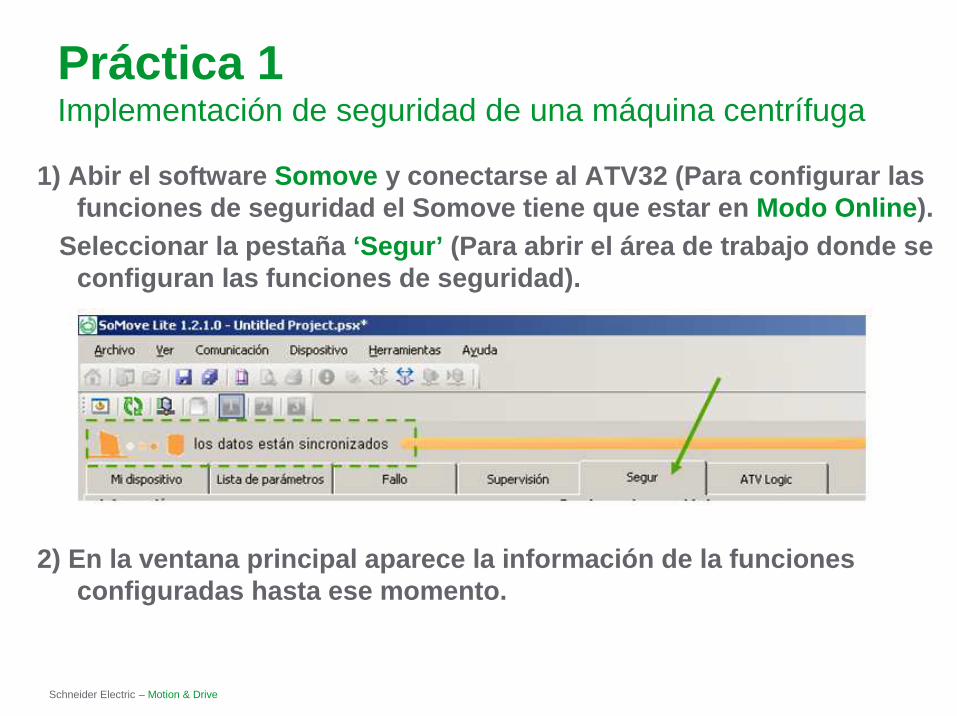
Práctica 1 Implementación de seguridad de una máquina centrífuga
1) Abir el software Somove y conectarse al ATV32 (Para configurar las funciones de seguridad el Somove tiene que estar en Modo Online ).
Seleccionar la pestaña ‘Segur’ (Para abrir el área de trabajo donde se configuran las funciones de seguridad).
2) En la ventana principal aparece la información d e la funciones configuradas hasta ese momento.
Schneider Electric – Motion & Drive
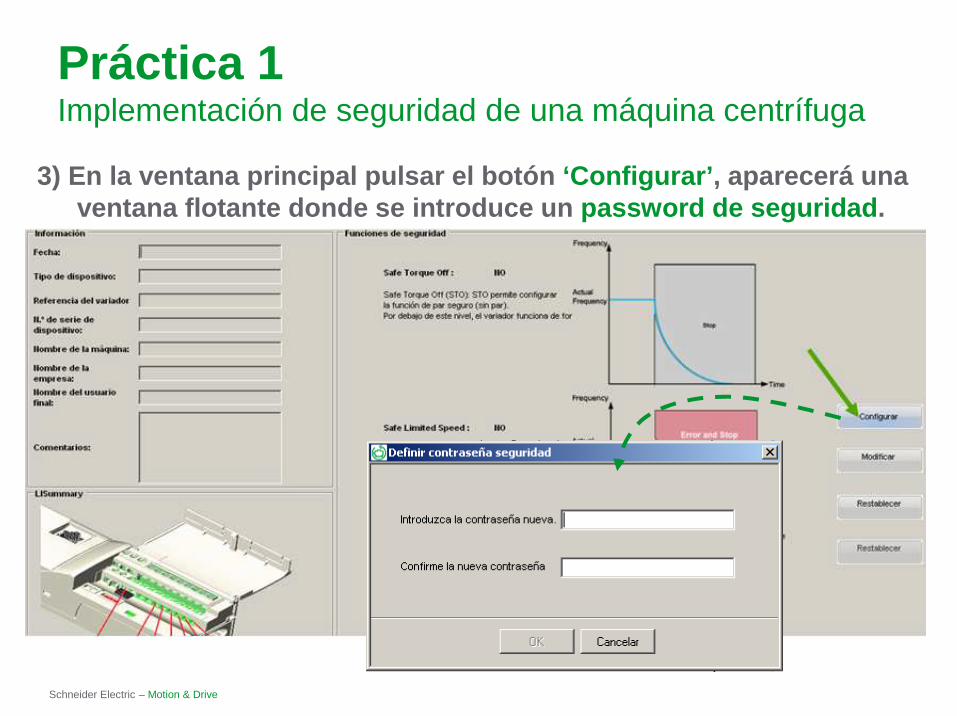
Práctica 1 Implementación de seguridad de una máquina centrífuga
3) En la ventana principal pulsar el botón ‘Configurar’ , aparecerá una ventana flotante donde se introduce un password de seguridad .
Schneider Electric – Motion & Drive
Práctica 1 Implementación de seguridad de una máquina centrífuga
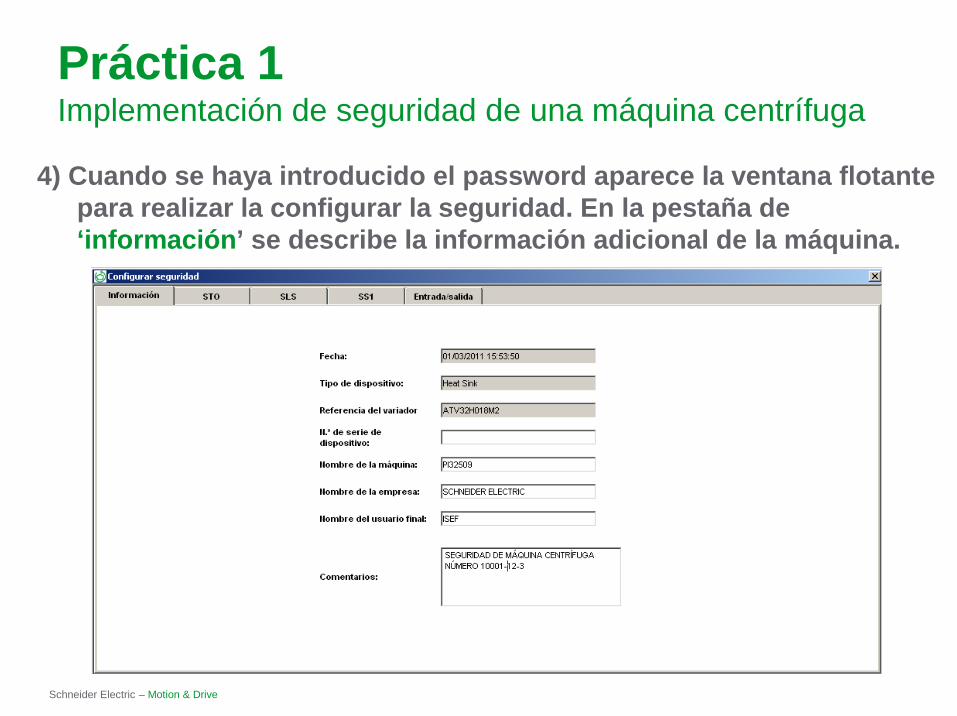
4) Cuando se haya introducido el password aparece la ventana flotante para realizar la configurar la seguridad. En la pes taña de ‘información ’ se describe la información adicional de la máquina .
Schneider Electric – Motion & Drive
Práctica 1 Implementación de seguridad de una máquina centrífuga
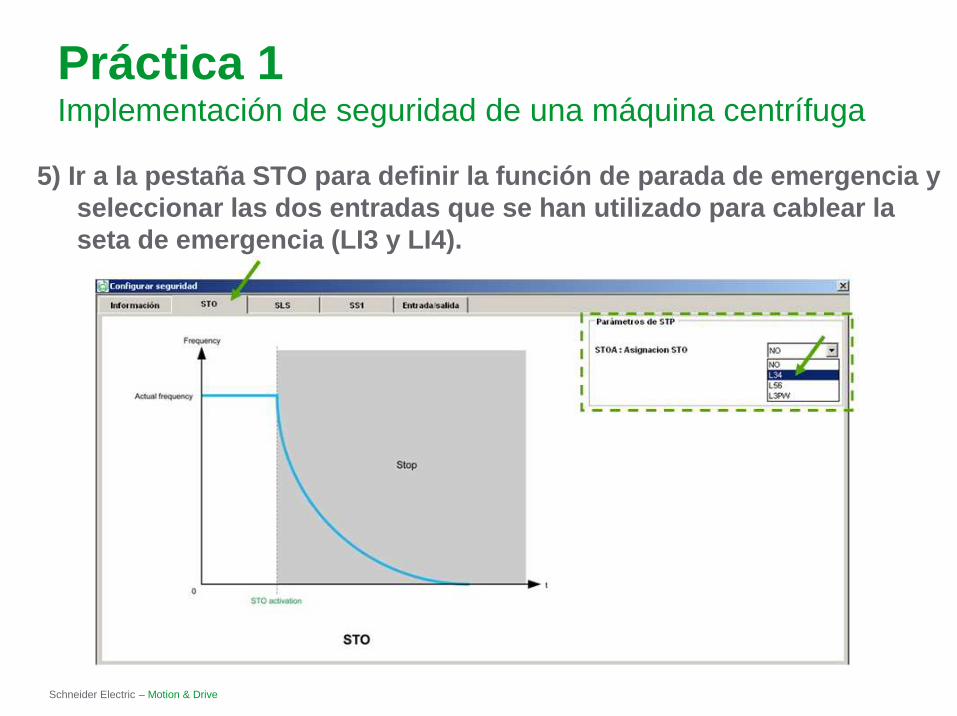
5) Ir a la pestaña STO para definir la función de p arada de emergencia y seleccionar las dos entradas que se han utilizado p ara cablear la seta de emergencia (LI3 y LI4).

Schneider Electric – Motion & Drive
Práctica 1 Implementación de seguridad de una máquina centrífuga
6) Ahora en la pestaña Ir a la pestaña SLS para definir la función la barrera de seguridad , las entradas que se han util izado para cablear las barrera son (LI5 y LI6).

Schneider Electric – Motion & Drive
Práctica 1 Implementación de seguridad de una máquina centrífuga
7) Una vez configurado, pulsar la tecla OK para que se cargue laconfiguración de seguridad al variador.
8) Para realizar la certificación de sedguridad del equipo ir al menúcontextual, desplegar el menú ‘Dispositivo’ y en ‘Función seguridad’ elegir ‘Firma de equipo’.
Schneider Electric – Motion & Drive
Práctica 1 Implementación de seguridad de una máquina centrífuga
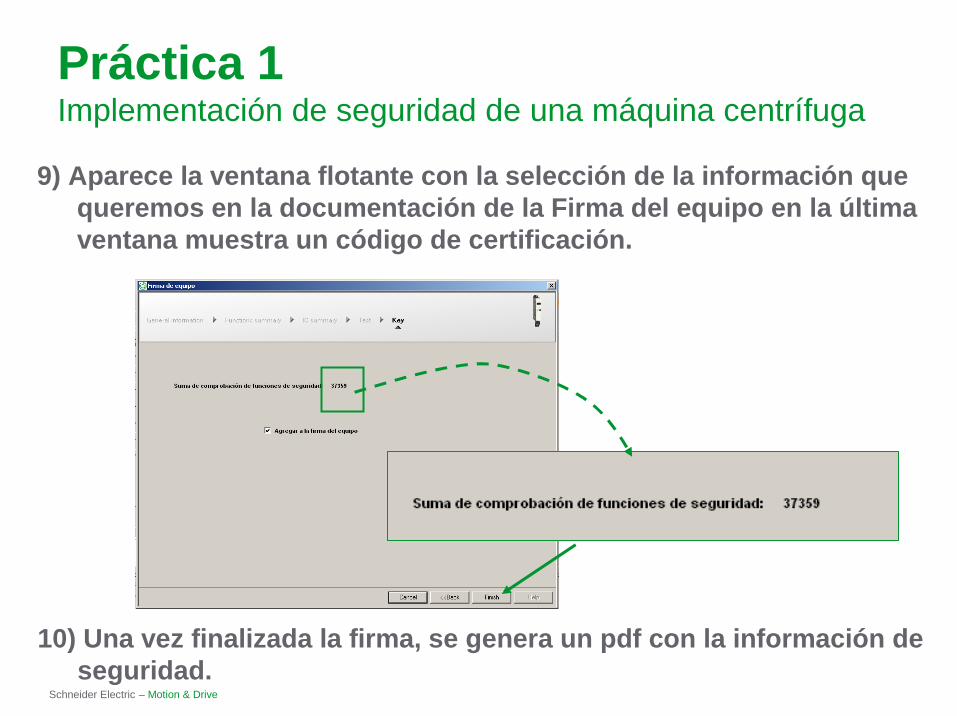
9) Aparece la ventana flotante con la selección de la información que queremos en la documentación de la Firma del equipo en la última ventana muestra un código de certificación.
10) Una vez finalizada la firma, se genera un pdf co n la información de seguridad.

Schneider Electric – Motion & Drive
Práctica 2Programación con el ATV Logic
Objetivos:Conocer y familiarizarse en la programación de ATV L ogic dentro del variador ATV32.
● Introducción.
● Definición del tipo de Entradas/salidas virtuales.
● Asignación de entradas físicas del sistema.
● Activación del programa.

Schneider Electric – Motion & Drive
+
+inteligencia
+Potencia
comunicación+
Facilidad
SoluciónAltivar Logic de Altivar 32
8 parámetros dedicados
HMIpersonalizable
Hasta Bloques en programa
50Bloques
funcionales diferentes
30
Tareas
diferenciadas
3
Lenguaje programación
simple
FBD
2 Síncronas ����
1 auxiliar+
Buses de campoAcceso a
Interacción
E/S del variador
Acceso a
+
Parámetros más habituales
Acceso a
2ms
Solución

Schneider Electric – Motion & Drive
Práctica 2 Programación de ciclo automático de máquina● Al pulsar LI3 la máquina debe realizar el ciclo indicado.
● Avanzar durante 5 seg y retroceder durante otros 5 seg.● La velocidad del movimiento será la velocidad máxima (HSP)
HSP
Velocidad
- HSP
5s
5sTiempo
Schneider Electric – Motion & Drive
Práctica 2 Programación de ciclo automático de máquina
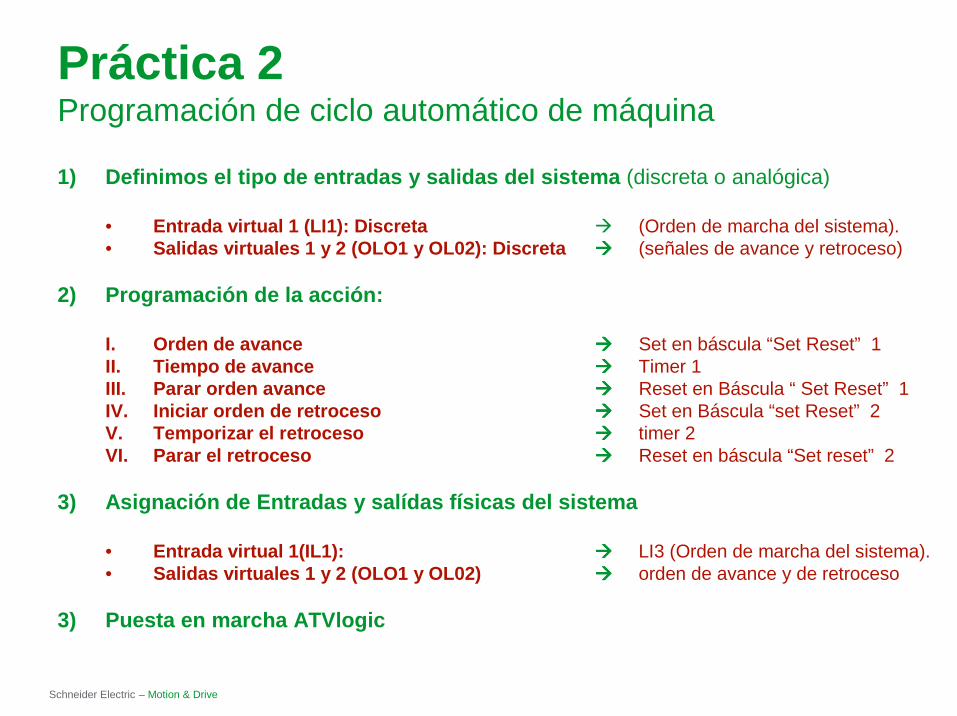
1) Definimos el tipo de entradas y salidas del siste ma (discreta o analógica)
• Entrada virtual 1 (LI1): Discreta � (Orden de marcha del sistema).• Salidas virtuales 1 y 2 (OLO1 y OL02): Discreta ���� (señales de avance y retroceso)
2) Programación de la acción:
I. Orden de avance ���� Set en báscula “Set Reset” 1II. Tiempo de avance ���� Timer 1III. Parar orden avance ���� Reset en Báscula “ Set Reset” 1IV. Iniciar orden de retroceso ���� Set en Báscula “set Reset” 2V. Temporizar el retroceso ���� timer 2VI. Parar el retroceso ���� Reset en báscula “Set reset” 2
3) Asignación de Entradas y salídas físicas del siste ma
• Entrada virtual 1(IL1): ���� LI3 (Orden de marcha del sistema).• Salidas virtuales 1 y 2 (OLO1 y OL02) ���� orden de avance y de retroceso
3) Puesta en marcha ATVlogic

Schneider Electric – Motion & Drive
Práctica 2 Programación con ATVlogic
1) Definimos el tipo de entradas y salidas del siste ma (discreta o analógica)
• Entrada virtual 1 (LI1): Discreta � (Orden de marcha del sistema).• Salidas virturales 1 y 2 (OLO1 y OL02): Discreta ���� (señales de avance y retroceso)
(debemos hacer doble click sobre las entradas virtuales en la pantalla de ATVlogic)
Schneider Electric – Motion & Drive
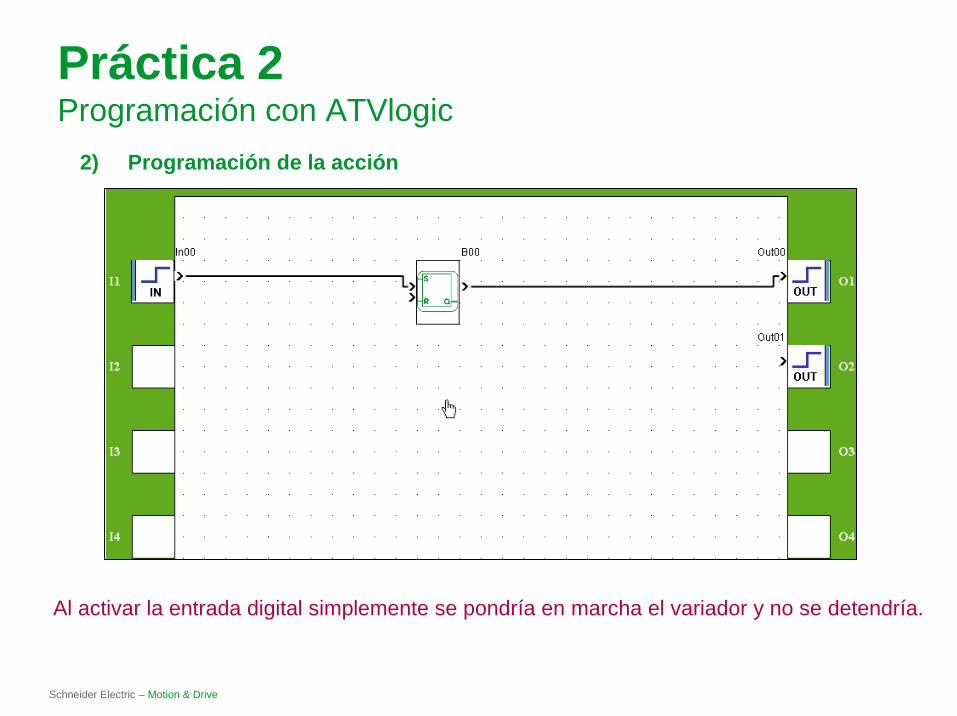
Al activar la entrada digital simplemente se pondría en marcha el variador y no se detendría.
Práctica 2 Programación con ATVlogic
2) Programación de la acción

Schneider Electric – Motion & Drive
Añadimos un temporizador para hacer que se detenga al cabo de un tiempo
Práctica 2 Programación con ATVlogic
2) Programación de la acción
Schneider Electric – Motion & Drive
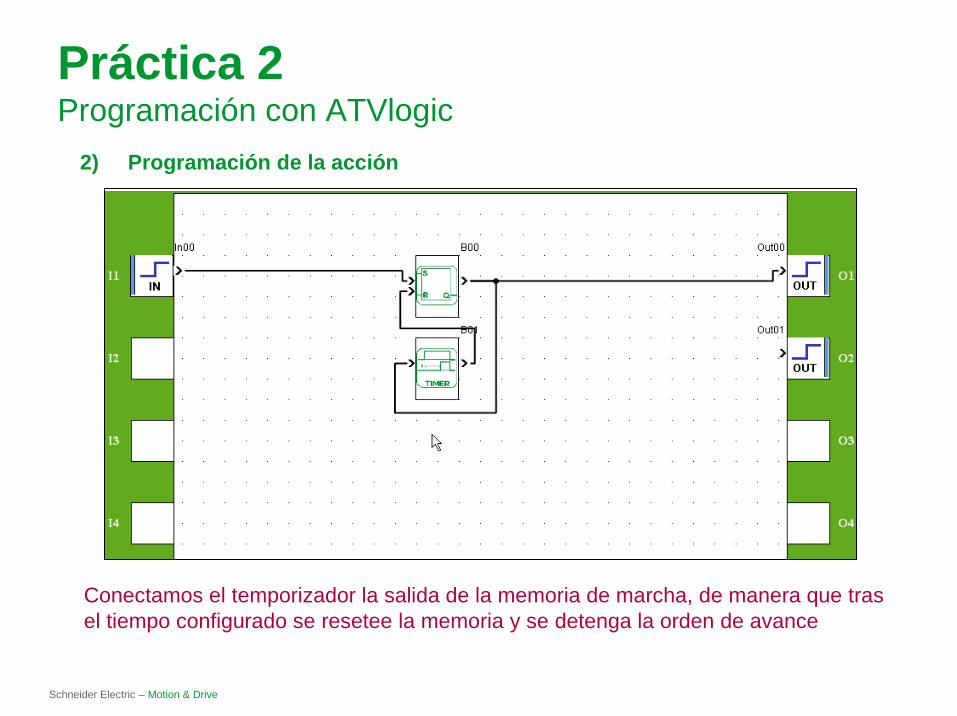
Conectamos el temporizador la salida de la memoria de marcha, de manera que tras el tiempo configurado se resetee la memoria y se detenga la orden de avance
Práctica 2 Programación con ATVlogic
2) Programación de la acción

Schneider Electric – Motion & Drive
Añadimos otra memoria para controlar la orden de retroceso y la conectamos a la salida
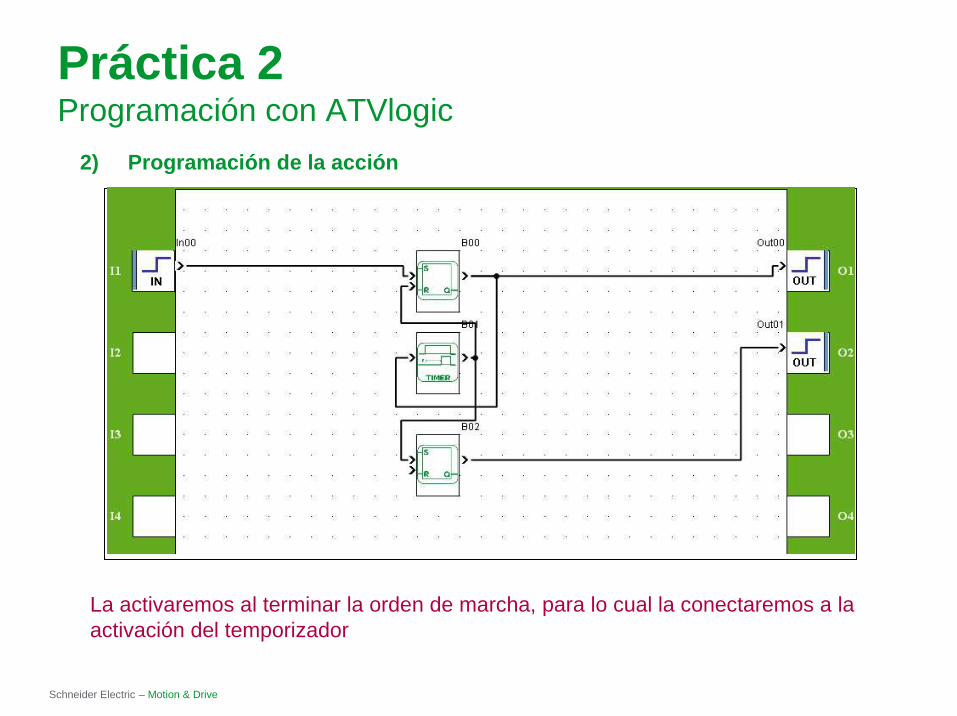
Práctica 2 Programación con ATVlogic
2) Programación de la acción
Schneider Electric – Motion & Drive
La activaremos al terminar la orden de marcha, para lo cual la conectaremos a la activación del temporizador
Práctica 2 Programación con ATVlogic
2) Programación de la acción

Schneider Electric – Motion & Drive
Del mismo modo que para le avance, añadimos un Timer que controle el tiempo que esté activa la orden de retroceso
Práctica 2 Programación con ATVlogic
2) Programación de la acción

Schneider Electric – Motion & Drive
Práctica 2 Programación con ATVlogic
3) Asignación de Entradas y salídas físicas del siste ma
• Entrada virtual 1(IL1): � LI3 (Orden de marcha del sistema).• Salidas virturales 1 y 2 (OLO1 y OL02) ���� orden de avance y de retroceso
4) Puesta en marcha ATVlogic

Schneider Electric – Motion & Drive
Ejemplo de integración ATV32 Implementación de arquitecturas de seguridad
Objetivos:Analizar algunos ejemplos de arquitecturas de seguri dad que pueden dar respuesta a gran parte de los requerimientos de nue stros clientes
Schneider Electric – Motion & Drive
Arquitecturas de Seguridad sin módulo de seguridad
Preventa
Schneider Electric – Motion & Drive
Arquitecturas propuestas Sin módulo seguridad preventa
●Aplicación ideal:●Máquinas compactas o simples con instalacion seguridad simple (1 o 2
elementos de seguridad)..
●Ventajas:●Coste reducido (no es necesario módulo de seguridad)
●Reducción de espacio (menos elementos)
●consideraciones:● Limitados elementos de captación de seguridad
●No proporciona señal de salida segura (solo proporciona la parada segura.

Schneider Electric – Motion & Drive
Arquitecturas propuestas:Esquema conceptual sin módulo de seguridad preventa
PL=d, Cat 3 / SIL2
PL=e, Cat 4 / SIL3
PL=d, Cat 3 / SIL2
Parada cat.0 Parada cat.1 / SLS Parada cat.0 +Parada cat.1 ó SLS
1 función de seguridad 2 funciones de seguridad
Ver TVDA certificada
Valida también para Parada cat.2
PL=e, Cat 4 / SIL3
PL=d, Cat 3 / SIL2
Schneider Electric – Motion & Drive
+24V
0V
COM
STO_A
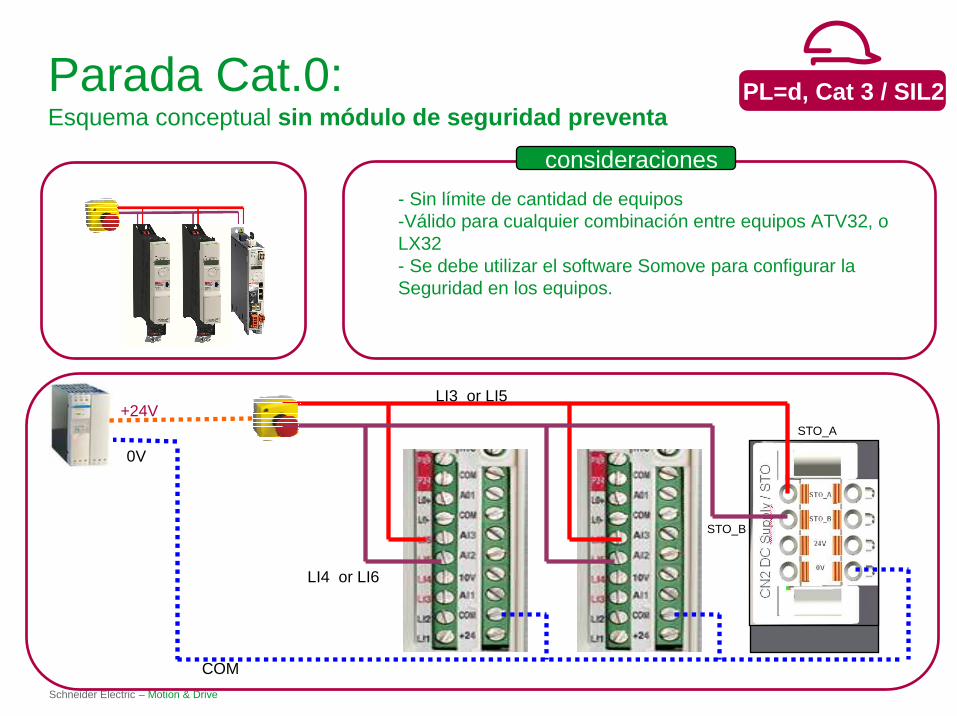
Parada Cat.0:Esquema conceptual sin módulo de seguridad preventa
PL=d, Cat 3 / SIL2
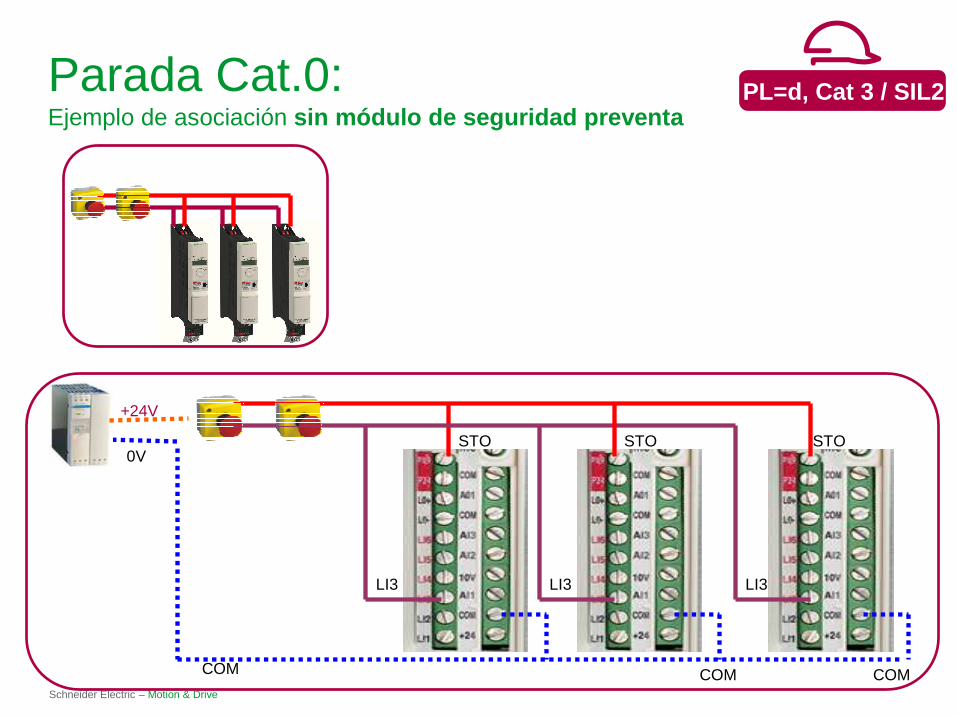
- Sin límite de cantidad de equipos-Válido para cualquier combinación entre equipos ATV32, o LX32- Se debe utilizar el software Somove para configurar la Seguridad en los equipos.
STO_B
consideraciones
LI3 or LI5
LI4 or LI6

Schneider Electric – Motion & Drive
+24V
0V
COM
LI3
STO STOSTO_A
LI3
PL=e, Cat 4 / SIL3
- Sin límite de cantidad de equipos-Válido para cualquier combinación entre equipos ATV32, o LX32- Recomendable el uso de cable apantallado en STO- Se debe utilizar el software Somove para configurar la Seguridad en los equipos.
STO_B
consideraciones
Parada Cat.0:Esquema conceptual sin módulo de seguridad preventa

Schneider Electric – Motion & Drive
- Sin límite de cantidad de equipos-Válido para cualquier combinación entre equipos ATV32, o LX32 -Se necesita tarjeta adicional eSM en LX32 (consultar conexionado)-Se debe configurar la seguridad con software SOMOVE
0V
COM COM COM
LI3 or LI5
LI4 or LI6
+24V
Parada Cat.1 o SLS:Esquema conceptual sin módulo de seguridad preventa
PL=d, Cat 3 / SIL2
consideraciones
Schneider Electric – Motion & Drive
+24V
0V
COM
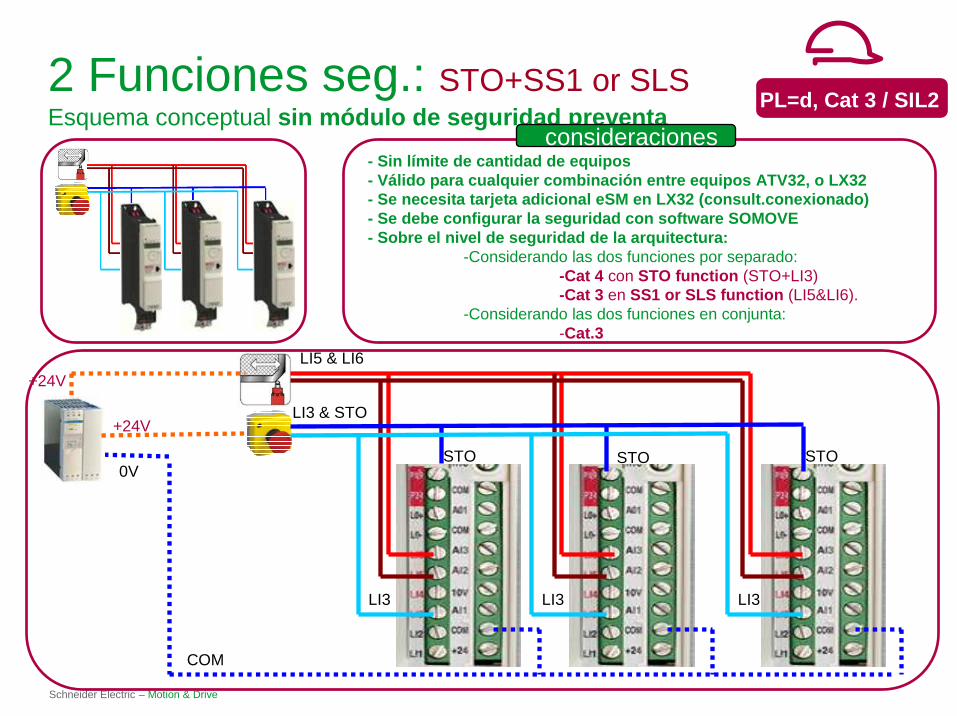
LI5 & LI6
- Sin límite de cantidad de equipos- Válido para cualquier combinación entre equipos AT V32, o LX32 - Se necesita tarjeta adicional eSM en LX32 (consult. conexionado)- Se debe configurar la seguridad con software SOMOV E- Sobre el nivel de seguridad de la arquitectura:
-Considerando las dos funciones por separado:-Cat 4 con STO function (STO+LI3)-Cat 3 en SS1 or SLS function (LI5&LI6).
-Considerando las dos funciones en conjunta:-Cat.3
+24V
STO STO STO
2 Funciones seg.: STO+SS1 or SLSEsquema conceptual sin módulo de seguridad preventa
LI3 LI3 LI3
LI3 & STO
consideraciones
PL=d, Cat 3 / SIL2
Schneider Electric – Motion & Drive
Arquitecturas de Seguridad con módulo de seguridad
Preventa

Schneider Electric – Motion & Drive
Arquitecturas propuestas Con módulo seguridad preventa
●Aplicación ideal:● Todo tipo de máquinas, especialmente máq. De mayor complejidad
●Ventajas:●Gran flexibilidad :
● Perfecto en máquinas mixtas donde además de variadores necesitemos actuar de forma segura sobre más elementos, ej.Contactores, señales de emergencia, bloqueos de máquinas, etc…

Schneider Electric – Motion & Drive
Arquitecturas propuestas:Esquema conceptual con módulo seguridad preventa
PL=d, Cat 3 / SIL2
PL=e, Cat 4 / SIL3
PL=d, Cat 3 / SIL2
Parada cat.0 Parada cat.1 / SLS Parada cat.0 +Parada cat.1 o SLS
1 función de seguridad 2 funciones de seguridad
Ver TVDA certificada
Valida también para Parada cat.2
PL=e, Cat 4 / SIL3 PL=d, Cat 3 / SIL2
PL=d, Cat 3 / SIL2
Schneider Electric – Motion & Drive
Cadenas de seguridad en función de la cantidad e
puntos de seguridad o varias funciones de seguridad

Schneider Electric – Motion & Drive
Arquitecturas propuestas:Esquemas conceptuales
Sin preventa
Ejemplos asociación elementos seguridad
PL=d, Cat 3 / SIL2
Con preventa
PL=e, Cat 4 / SIL3
Con controlador preventa
Asociación en serie
Asociación en serieSupervisión individual
Schneider Electric – Motion & Drive
+24V
0V
COM
LI3
STO STO STO
COM COM
LI3 LI3
PL=d, Cat 3 / SIL2Parada Cat.0:Ejemplo de asociación sin módulo de seguridad preventa

Schneider Electric – Motion & Drive
0VXPS AF
(not temporizated)
COM
LI3
STO STO STO
COM COM
LI3 LI3
+24V
PL=d, Cat 3 / SIL2Parada Cat.0:Ejemplo de asociación con módulo de seguridad preventa
Schneider Electric – Motion & Drive
Ejemplo de montaje en cuadro

Schneider Electric – Motion & Drive
Ejemplo de montaje de cuadro Objetivo: ahorro de espacio y tiempo de montaje
●Componentes de la máquina:● 4 variadores de velocidad● 2 servoaccionamientos
●PLC
●Pantalla●Protecciones
●Elementos seguridad
●Requerimientos:●Seguridad � Arquitectura Categoría 4
●Comunicación CANopen●Ahorro de espacio
PL=e, Cat 4 / SIL3

Schneider Electric – Motion & Drive
Soluciones Integración : Industria – OEM
Montaje 1 Montaje• Sin montaje juxtapuesto
Comunicaciones• Cajas de derivación CANopen
Seguridad• 4 relés de seguridad ó• Controlador Seguridad
Schneider Electric – Motion & Drive
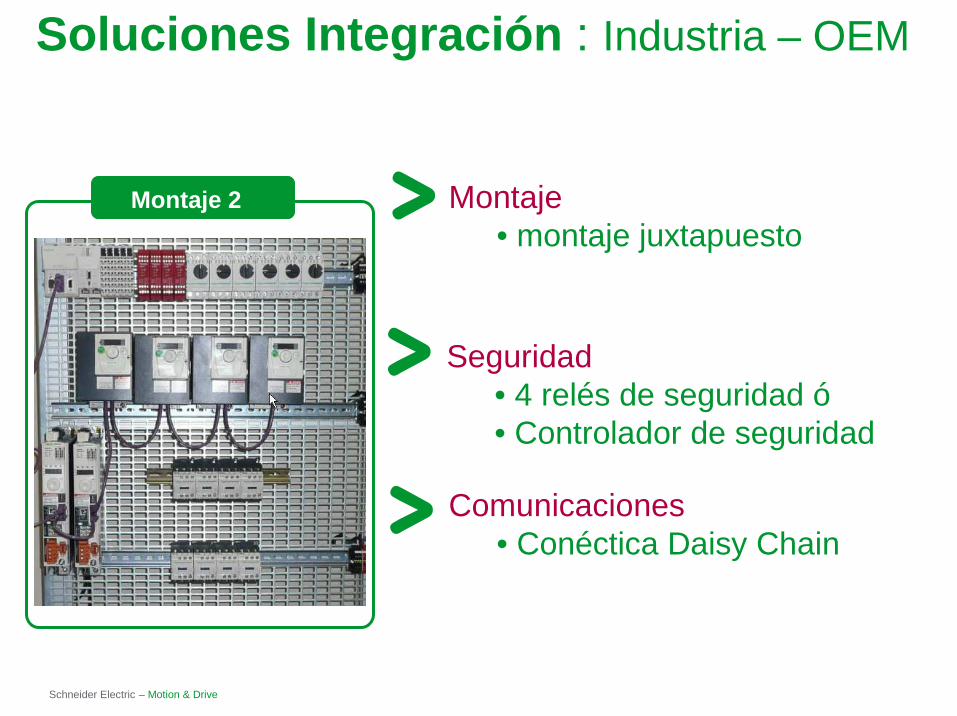
Soluciones Integración : Industria – OEM
Montaje 2 Montaje• montaje juxtapuesto
Comunicaciones• Conéctica Daisy Chain
Seguridad• 4 relés de seguridad ó• Controlador de seguridad
Schneider Electric – Motion & Drive
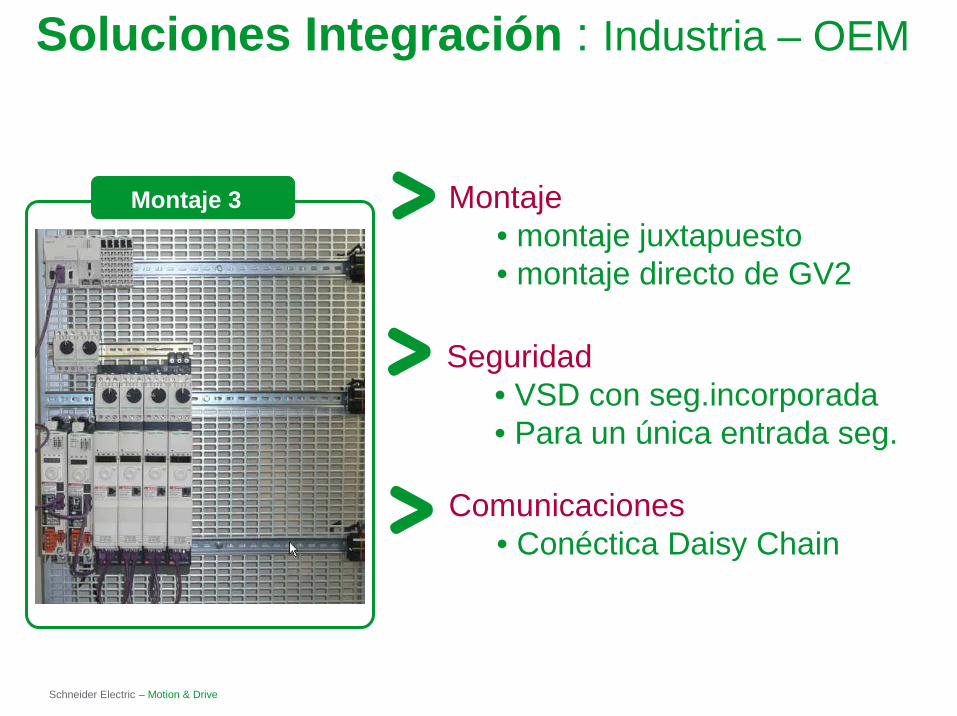
Soluciones Integración : Industria – OEM
Montaje• montaje juxtapuesto• montaje directo de GV2
Montaje 3
Comunicaciones• Conéctica Daisy Chain
Seguridad• VSD con seg.incorporada• Para un única entrada seg.

Schneider Electric – Motion & Drive
Soluciones Integración : Industria – OEM
Montaje• montaje juxtapuesto• montaje directo de GV2
Montaje 4
Comunicaciones• Conéctica Daisy Chain
Seguridad• VSD con seg.incorporada• Diversos elementos seg.





























