Embed Size (px)
Citation preview

Motion capture

• Applications
• Systems
• Motion capture pipeline
• Biomechanical analysis

Applications
BiomechanicsComputer animation Robotics
Video games AnthropologyCinema

Is a good dancer more sexually attractive?
(with Dr. Cronk and Dr. Trivers from Anthropology, Rutgers)

What is captured?
Animals
Humans
Celebrities
Objects

What is captured?
Whole body
Face
Hands

Pros and cons
• Truthfully record all the fine details of the natural motion
• The captured motion is difficult to be
• generalized
• modified
• controlled

How to use the data?• Off-line
• Motion libraries
• Motion graphs
• Training examples


How to use the data?• Off-line
• Motion libraries
• Motion graphs
• Training examples
• On-line
• Drive characters based on the movement of the actors in real time




Performance animation

• Applications
• Systems
• Motion capture pipeline
• Biomechanical analysis

Types of Systems
• Optical systems
• Magnetic systems
• Motion tapes
• Vision-based systems
• Inertial and ultrasonic systems

Optical systems
• Cameras
• High temporal resolution (120+ fps)
• Detect the locations of reflective markers
• Markers
• passive: sensitive to infrared
• active: emit LED light

Magnetic system
• Cumbersome sensors (heavier and also wired)
• Smaller workspace
• Record both position and orientation
• Lower resolution (80 fps max)
• Sensitive to EMI/metal in the environment

Motion tapes
Contain optical fibers and sensors that can detect the bending and twisting
Restriction of movement
Need another technology for detecting root translation
Measure the shape of surface precisely

Markerless mocap
• http://www.organicmotion.com/
• Kinect

Ultrasonic + Inertial
• A wearable self-contained system
• Inertial information is provided by gyroscopes and accelerometers
• Microphones are used to record the distance between each pair of sensors


Body-mounted cameras

• Applications
• Systems
• Motion capture pipeline
• Biomechanical analysis

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Calibration
• Static calibration
• Figure out where the floor is
• Dynamic calibration
• Figure out the capture volume

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Capturing• Marker placement
• Markers should move rigidly with joints
• Asymmetric placement helps in post-processing
• T-pose and range of motion
• Recording specific poses can help estimating bone lengths

3D marker position
• In principle, two cameras are sufficient to reconstruct the 3D location of a marker
• In practice, more cameras can
• reduce occlusion
• increase precision

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Model building
• Given recored marker positions, estimate the dimension of each body part
• Optimize both bone length and handle positions at the same time
• Templates and heuristics help

Problem statement
generic skeletonrough handle positions
specific pose used for calibration
bone lengthhandle offset
+

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Marker labeling
• Ghost markers
• Missing markers
• Switching trajectories

Raw data
3D locations of markers

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Inverse kinematics
• Input: articulated body with handles + desired handle positions
• Joint angles that move handles to desired positions

Motion capture pipeline
calibration capturingmodel
building
marker labelinginverse
kinematicstrajectory
smoothing

Trajectory smoothing
• Global optimization that minimizes the velocity of the joint angles while staying as close as possible to the desired handle positions

Final motion

Issues
The main problem with motion capture associated with characters has to do
with mass distribution, weight and exaggeration. It is impossible for a performer to produce the kind of motion exaggeration that a cartoon character needs,
and the mass and weight of the performer almost never looks good when applied to a character
of different proportions.
Eric Darnell, codirector of Antz

Issues
The mapping of human motion to a character with non-human proportions doesn’t
work, because the most important things you get out of motion capture are the weight shifts and the
subtleties and that balancing act of the human body. If the proportions change, you throw all that out
the door, so you might as well animate it.
Richard Chuang, VP at PDI

• Applications
• Systems
• Motion capture pipeline
• Biomechanical analysis

Biomechanical applications
• Understand and quantify the forces produced by muscles, ligaments, and tendons via noninvasive instruments
• Synthesize realistic human locomotion

Measurement
• Need to record accurate kinematic properties of the motion
• video or infrared based motion analysis systems
• Need to measure the external forces precisely
• force platforms that measures the ground reaction forces

Motion analysis• Interaction of muscle
contractions across several joints is extremely complex
• Most invasive devices can only measure forces in single tissues
• surgical stables
• buckle force transducers

Motion analysis
• Inverse dynamics can only measure the net effect of the internal forces and torques across several joints
• Inverse dynamics can compute total load on a system, but can not determine the distribution of the load

Measurement
• Inverse dynamics assumes there is no co-contraction of agonist and antagonist muscles

Joint kineticsEqual in joint forces and moments, but completely different in muscle activities

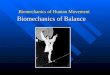
Model reductionReduce complex anatomical structures
F F
F!
F!
!F!
MF
Foot with muscle force F Forces F* and -F* added at ankle center
Couple F and -F* replaced by MF moment

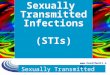
Model reduction
force from triceps surae
ligament forcebone-on-bone forces
force from tibialis anterior
gravity gravity
ground contact forceground contact force
Fankle
Mankle

Limitations
• ID relies on assumption that are not always valid
• joint friction and air friction
• non-uniform distribution of mass
• movement of joint center of rotation
• approximation of body segment parameters
• Measurement error and numerical error propagation

What’s next?

• Field trip to Mocap lab (TSRB 325)
• Need one volunteer