-
7/21/2019 Motion Analysis Theory
1/6
1 Motion Analysis - Theory
We identify a kinematic analysis, as a study which only
considers the geometries andthe constraints of a machine, with no
regard of the forces, torques or masses of the system.A dynamic
analysis studies the system, while considering the driving forces,
torques,
and masses of the system. Before discussing the methods of
performing such studies, letsclarify some main definitions.
1.1 Inputs and outputs of a system
The systems we study in motion analysis are real life machines
which are driven by ac-tuators, and which produces desired motion.
The inputs of the system are the degrees offreedom (DOF) related to
actuation. Consider a motor driving a gear pair. Lets take thegear
pair as the mechanism. The inputs to the system for the purposes of
a kinematicstudy are the motor acceleration, angular speed, and
motor shaft angle. For a dynamicstudy the input is the torque
produced by the motor. The outputs of the system wouldbe the output
gear speed, rotation angle and acceleration.
1.2 Four problems in motion studies
In general, motion analysis of mechanisms are classified in to
four problems.
Forward kinematics This analysis is concerned with finding the
output kinematic variablesby using the known quantities of input
kinematic variables to the system.
Inverse kinematics The inverse kinematic problem attempts to
find the input kinematicvariables by using the known quantities of
the output kinematic variables.
Forward dynamics The forward dynamics problem attempts to find
the output kinematic
variables of the system by using the known quantities of the
input forces to thesystem.
Inverse dynamics The inverse dynamics problem attempts to find
the input forces/torquesof the mechanism for given known quantities
of input kinematic variables.
The solution strategy for these four problems are introduced
using the following example.
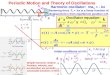
1.3 Example - The RR manipulator
1.3.1 Forward kinematics
Position analysis
For the forward position analysis the knowns are the input DOF
1, 2. The unknownsare the output DOF x, y. The final end effector
position is marked as x, y. Using vectorloop equations for the loop
OAB we can find:
1
-
7/21/2019 Motion Analysis Theory
2/6
2
x,y
1
O
A
B
111
222
{WA}
{WB}{1A}
{1C}
{2A}
{2C}
m1I1
m2I2
l1
l2
Figure 1: The RR manipulator
rOA+ rAB rOB =0rOB =rOA+ rAB
x
y
=
l1cos(1) + l2cos(1+ 2)l1sin(1) + l2sin(1+ 2)
(1)
Define the input DOF as q and output DOF as p. Then a general
expression for theforward position analysis equations can be
written as:
p= f(q) (2)
Velocity analysis: For the forward velocity analysis the knowns
are the input DOF speedsand positions1, 2, 1, 2. The unknowns are
the output DOF speeds x, y. The velocityequations can be found by
differentiating the position equations.
x
y
=
l1sin(1)1 l2sin(1+ 2)(1+ 2)l1cos(1)1+ l2cos(1+ 2)(1+ 2)
(3)
This can be arranged in a convenient matrix form. Notice that a
compact notation is usedfor sines and cosines. ex: sin(1) =S1,
sin(1+ 2) =S12
x
y
=
l1S1 l2S12 l2S12l1C1+ l2C12 l2C12
12
(4)
2
-
7/21/2019 Motion Analysis Theory
3/6
This can be expressed in a compact form by defining the matrix
as Jv.
p= Jvq (5)
Acceleration analysis: For the forward acceleration analysis the
knowns are the input
DOF accelerations, speeds and positions 1, 2, 1,
2,
1,
2. The unknowns are theoutput DOF accelerations x, y. The
acceleration equations can be found by differentiating
the velocity equations. This can be arranged in a matrix form
as:
x
y
=
l1S1 l2S12 l2S12l1C1+ l2C12 l2C12
12
+l1C11 l2C121 l2C122 l2C121 l2C122
l1S11 l2S121 l2S122 l2S121 l2S122
12
(6)
p= Jvq + Jaq (7)
1.3.2 Inverse kinematics
Position analysis: For the inverse position analysis the knowns
are the output DOFpositions x, y. The unknowns are the input DOF
accelerations 1, 2. Apply cosine ruleto angle BOA, to find 1. The
solution for 2 is found by identifying an expression fortan(1+ 2),
using the equation set (1).
1 =aTan2(y, x) cos1
l21+x2+y2l2
2
2l1
x2+y2
2 =aTan2(y l1sin 1, x l1cos 1) 1(8)
There are two solutions for the angles 1, 2, for a given
position x, y.
2
x,y
1
O
A
B
{WA}
{1A}
-2
Figure 2: The two solutions for the inverse position
analysis
3
-
7/21/2019 Motion Analysis Theory
4/6
1
-m1a1x
l1
-m1a1y
-I11
-f12x
-f12y
f01y
f01x
01
-12
Input (external) forces
internal forces
Inertial forces
1
-m2a2x
l2
-m2a2y
-I22
f12y
f12x
122
Figure 3: FBD- link1 and 2
Velocity analysis: Rearrange the forward velocity analysis
equations to find qwhen pisknown.
q= J1v p (9)
Acceleration analysis: Rearrange the forward acceleration
analysis equations to find qwhen p is known.
q= J1v (p Jaq) (10)
1.3.3 Force analysis - Inverse dynamics
To perform a dynamic analysis first the free body diagrams for
the two links are drawn
indicating all the forces.
The force balance equations applied to link 1:
f01x f12x m1a1x= 0f01y f12y m1a1y = 001 12 I11+ f01xl1S1
f01yl1C1= 0
(11)
The force balance equations applied to link 2:
f12x
m2a2x= 0f12y m2a2y= 012 I22+ f12xl2S12 f12yl2C12= 0
(12)
4
-
7/21/2019 Motion Analysis Theory
5/6
-
7/21/2019 Motion Analysis Theory
6/6
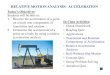
q=[1, 2]q=[1,2]q=[1,2]q =[1, 2] p=[x, y]...
Initial condition set
1,2
Initial condition set
1, 2
Figure 4: Dynamic simulation block diagram
Now the set of unknowns for the forward dynamics study are the
accelerations of the inputDOF and the internal forces. The vector
of unknowns is identified as:
f01x f01y f12x f12y 1 2T=
fi qT (18)
There are 6 equations and 6 unknowns which is solvable. Arrange
the equation in thematrix form:
1 0 1 0 m1l1S1 00 1 0 1 m1l1C1 0
l1S1 l1C1 0 0 I1 00 0 1 0 m2(l1S1 l2S12) m2(l2S12)0 0 0 1
m2(l1C1+ l2C12) m2(l2C12)0 0 l2S12
l2C12 0
I2
f01xf01yf12xf12y12
=
m1l1C121m1l1S1
21
01+ 12m2((l1C11 l2C121 l2C122)1+ (l2C121 l2C122)2)m2((l1S11
l2S121 l2S122)1+ (l2S121 l2S122)2)
12
(19)
The solution can be found by matrix inversion:
C
fiq
= d
fi
q
= C1d
(20)
6