Embed Size (px)
Citation preview

Automatic
Control &
Systems
Engineering.
Design and Construction of Hardware Extensions (Add-ons) for a
Modular Self-Reconfigurable Robot System
Mohamed Marei
2016
MAY
Supervisor: Dr. Roderich Gross
A dissertation submitted in partial fulfilment of the
requirements for the degree of MEng Mechatronic and Robotic
Engineering

II
EXECUTIVE SUMMARY
INTRODUCTION/BACKGROUND
This project aims to develop a vision add-on for a modular robot platform under
development at the University of Sheffield. After researching the field of modular
self-reconfigurable modular robots, including existing robot implementations and
applications of these systems, the need for improved sensing was identified. The
identification of design requirements and consequently the development of the add-on
was conducted. The various stages of development, including hardware, software, and
control, are detailed in their subsequent chapters.
AIMS AND OBJECTIVES
This project aimed to study, design, and build hardware add-ons for the HiGen
modular self-reconfigurable robot (MSR) system. The objectives of this project were
to research current MSR systems, design and build a hardware add-on to be used in
conjunction with the HiGen module, and program and test the add-on with the
module.
ACHIEVEMENTS
Research in the field of MSR systems was extensively explored. Following that, the
area of application domains was investigated to identify similar implementations. The
hardware design of the add-on, including its subcomponents, was fully realised. In
addition, software to integrate the add-on subcomponent functionality was developed.
Following that, the add-on was explored in terms of its ability to acquire and process
data.

III
CONCLUSIONS / RECOMMENDATIONS
This report has successfully laid the framework for developing the MSR add-on,
including its hardware, software, and control aspects. Further work in the areas of
software and control development could be realised to unlock the full potential of this
device, and to ensure its successful integration with the HiGen MSR.

IV
ABSTRACT
Modular Self-Reconfigurable Robot (MSR) platforms are useful for modelling
complex problems of self-reconfiguration and cooperative self-assembly at the macro
and micro scales alike. They also derive immense potential from their ability to
reconfigure into any shape or form to suit any task, making them infinitely versatile –
theoretically. Practically, due to design constraints imposed upon their morphology,
they often lack the ability to interact with their environment and thus execute useful
tasks. This project aims to explore methods to develop a sensory and computational
add-on for an MSR system (the HiGen MSR). By identifying initial requirements,
developing the hardware and software capabilities of the add-on, and integrating the
functional elements together, the design of the add-on was realised. Experiments to
verify the utility of the add-on were also attempted. The report is concluded with
potential future works to build on this work and develop similar add-ons for the MSR.

V
ACKNOWLEDGEMENTS
Firstly, I would like to express my gratitude to my Project Supervisor, Dr Roderich
Gross, whose constant encouragement and support have been of great value to me. I
would also like to thank Mr. Christopher Parrott, whose patience and technical know-
how helped me fulfil much of what I intended to achieve.
I would also like to thank all of the academic and technical staff at the department of
Automatic Control and Systems Engineering at the University of Sheffield. You have
all helped me a great deal towards achieving my project objectives and endure the
stresses of the project, and for that I am truly grateful.
I would also like to give a huge thank you to my friends at the University of Sheffield,
my second family. Yohahn, Umang, Yaseeen, Simran, Christiaan, Matei, Sa’ad,
Thaqib, Sangam, Maha, Anupama, and Ishita. It’s been an absolute pleasure going
through this university experience with all its ups and downs, and you’ve all made
sure it was mostly ups! For that, I am eternally grateful. A special word of thanks to
my friend Younes as well, whom, despite I have not seen in so many years, has
always been at my side.
And last, and most certainly not least, to my family; my brother, Mazen; my Sister,
Reem; and my parents, Mr. Hesham Marei and Mrs Maha Seleem. Nothing I could
say could express my gratitude for your never-ending moral, emotional, and financial
support. Your belief in my abilities and your tireless dedication to my wellbeing have
been my sustenance throughout my life, and through this academic year – when I’ve
needed it most. I dedicate this work to you.

VI
TABLE OF CONTENTS
Chapter 1 - Introduction .......................................................................................... 1
1.1. Background and Motivation .......................................................................... 1
1.2. Problem Definition......................................................................................... 2
1.3. Aim of the Project .......................................................................................... 2
1.4. Objectives of the Project ................................................................................ 2
1.4.1. Primary Objectives................................................................................. 2
1.4.2. Stretch Goals (Advanced Objectives) .................................................... 2
1.5. Project Management ...................................................................................... 3
1.5.1. Initial Project Plan.................................................................................. 3
1.5.2. Project Resources ................................................................................... 4
1.5.3. Costs and Risk Assessment .................................................................... 4
1.5.4. Project Plan ............................................................................................ 7
1.5.5. Design Implementation .......................................................................... 7
1.6. Structure of the Report ................................................................................... 8
Chapter 2 - Literature Review .................................................................................... 9
2.1. Modular Self-Reconfigurable Robots: A Brief Overview ............................. 9
2.2. Modular Self-Reconfigurable Robot Systems: Taxonomy and Attributes .. 10
2.2.1. Morphology: Lattice, Chain, and Hybrid ............................................. 11
2.2.2. Locomotion Modes .............................................................................. 12
2.2.3. Control ................................................................................................. 13
2.2.4. Connector Design................................................................................. 14
2.2.5. Sensing ................................................................................................. 15
2.2.6. Communication .................................................................................... 16
2.3. Heterogeneous MSR Systems ...................................................................... 17
2.3.1. MSR Systems with Hardware Attachments (Add-ons) ....................... 17
2.3.2. Reconfigurable Manufacturing Systems (RMS) .................................. 19
2.4. Design Challenges of MSR Platforms ......................................................... 19
2.4.1. Computational Limitations .................................................................. 20
2.4.2. Power Sharing ...................................................................................... 20

VII
2.5. The HiGen Modular Robot .......................................................................... 21
2.5.1. The HiGen Module and Connector ...................................................... 21
2.5.2. HiGen Connector Architecture ............................................................ 22
2.5.3. Controller Area Network (CAN) ......................................................... 22
2.5.4. System Architecture ............................................................................. 23
Chapter 3 - Hardware Design ................................................................................... 24
3.1. Design Requirements ................................................................................... 24
3.1.1. System Definition ................................................................................ 24
3.1.2. Physical Characteristics ....................................................................... 25
3.1.3. Performance Characteristics ................................................................ 25
3.1.4. Compatibility ....................................................................................... 25
3.1.5. Usability ............................................................................................... 25
3.1.6. Early Concept Prototyping ................................................................... 26
3.2. Chassis Design (Mechanical Design) .......................................................... 27
3.2.1. Enclosure Design ................................................................................. 27
3.2.2. General Design Considerations............................................................ 28
3.2.3. Pan-Tilt Unit Design ............................................................................ 30
3.2.4. Pan-Tilt Alignment .............................................................................. 30
3.3. The Single-Board Computer ........................................................................ 31
3.4. On-board Electronics ................................................................................... 32
3.4.1. The Raspberry Pi.................................................................................. 32
3.4.2. The Raspberry Pi Camera .................................................................... 33
3.4.3. The Teensy Microcontroller ................................................................ 33
3.4.4. Low-Level Communication Management ........................................... 34
3.4.5. Power Requirements ............................................................................ 36
3.5. Electronics Integration: The Tool Expander ................................................ 37
3.5.1. Schematic Design................................................................................. 37
3.5.2. PCB layout ........................................................................................... 38
3.5.3. Surface-Mounted Components ............................................................ 41
3.6. Hardware Integration and Assembly ........................................................... 41
Chapter 4 - Software Design ..................................................................................... 43

VIII
4.1. Operating System ......................................................................................... 43
4.2. SSH (Secure Shell) ...................................................................................... 44
4.2.1. Configuring the Network Interface ...................................................... 44
4.3. Concept Testing and High-Level MATLAB Connectivity ......................... 46
4.3.1. Pi MATLAB Initialisation ................................................................... 46
4.3.2. Camera Board Initialisation ................................................................. 47
4.4. Tool Expander Programming (The Teensy) ................................................ 49
4.4.1. Serial Communication Using MiniCom .............................................. 50
4.4.2. Pan-Tilt from Keyboard ....................................................................... 50
4.4.3. Actuating the Motors using MATLAB ................................................ 51
4.5. Functionality Integration .............................................................................. 52
Chapter 5 - Experimentation and Results ............................................................... 54
5.1. The Target Tracking Problem: Approach .................................................... 54
5.2. The Target Tracking Problem: Framework ................................................. 54
5.3. Target Tracking: Experiments ..................................................................... 56
5.3.1. Experimental Outline ........................................................................... 56
5.3.2. Results .................................................................................................. 57
5.4. Target Tracking: Controller Design ............................................................. 59
5.5. Camera Calibration ...................................................................................... 60
Chapter 6 - Conclusion .............................................................................................. 63
6.1. Further Work ................................................................................................ 63
Appendix A: Project Task Sheet ............................................................................ i
Appendix B: Project Gantt Chart ......................................................................... ii
Appendix C: Project Resources Collected ...........................................................iii
Appendix D: .................................................................................................................. v
Appendix E: Source Code for Trackball ............................................................. vi
Appendix G: MATLAB Serial with Teensy ........................................................ ix
Appendix H: Pan-Tilt Model in MATLAB ......................................................... xi

IX
Appendix I: Source Code for Simple Tracking Controller ............................. xii
Appendix J: Design Sketches and SolidWorks Prototypes ............................. xiv
References ................................................................................................................... xv

X
LIST OF FIGURES
Figure 1: the ATRON self-reconfigurable robot combined into a snake configuration
(left), a vehicle-like configuration (right), and an intermediate configuration (back).
Printed from [3]............................................................................................................ 11
Figure 2 showing the components involved in robot design and their interaction.
Adapted from [8].......................................................................................................... 12
Figure 3(a) and (b): standalone HiGen connector module (left) [20] and HiGen
modules on the self-reconfigurable modular robot (right) [28]. Printed with
permission from C. Parrott, 2014. ................................................................................ 21
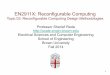
Figure 4: (left) the HiGen connector broken down into its components, showing the
(a) housing, (b) docking hooks, (c) motor and switch mount, (d) drive shaft, (e)
shroud, (f) connection board, and (g) DC geared motor; (right): the controller and its
functional pins. Both images printed with permission from C. Parrott, 2016. ............ 22
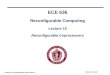
Figure 5: the overall system architecture, showing the communication pathways
between different system elements. The HiGen robot modules interface with each
other via the connector controllers (CC), which connect together to form a CAN bus.
...................................................................................................................................... 23
Figure 6 : the Arduino connected to the TTL JPEG Serial Camera via breadboard ... 26
Figure 7: the attachment template based on which the enclosure has been designed.
Courtesy of Parrott ....................................................................................................... 27
Figure 8: the full add-on assembly. Not shown: camera ribbon cable or servo wires . 28
Figure 9: the pan/tilt mechanism for two use cases: front attachment (left), and side
attachment (right) ......................................................................................................... 30
Figure 10: pan/tilt motion arcs, showing a range of approximately ±180° ................. 31

XI
Figure 11: four different single-board computers; Raspberry Pi 2 (left, back); ODroid
C1 (right, back); HummingBoard (left, front); MIPS Creator Ci20 (right, front).
Reproduced from [30] .................................................................................................. 31
Figure 12: (left) Raspberry Pi NoIR Camera. Retrieved from [31]; (centre) Teensy 3.2
LC (Low Cost). Retrieved from [32]; (right): Raspberry Pi Model A+. Retrieved from
[33] ............................................................................................................................... 33
Figure 13: an n+4-bit 'word' transmitted over UART serial, showing the start bit
(StrB), data bits (DB01-DBn), parity bit (PB), and stop bits (StpB). .......................... 35
Figure 14: schematic diagram for the Tool Expander PCB ......................................... 39
Figure 15: the Tool Expander PCB design.................................................................. 40
Figure 16: the Tool Expander PCB prototype board with surface-mounted
components, showing the Raspberry Pi interface header in the top right corner, and
the right-angle sensor header at the bottom. ................................................................ 41
Figure 17: the fully-assembled vision add-on, with a dummy connector base template
...................................................................................................................................... 42
Figure 18 showing the rasp-config interface. .............................................................. 44
Figure 19: the interfaces file........................................................................................ 45
Figure 20: the supplicant configuration file ................................................................ 46
Figure 21 showing the basic initialisation function for a Raspberry Pi board ........... 46
Figure 22 showing the cameraboard initialisation command using the board name
and resolution arguments (top) and the command line output (bottom) ..................... 47
Figure 23: true-colour JPEG frame showing the centre of the green object (top);
intensity thresholding of the image to isolate green colour from background (bottom)
...................................................................................................................................... 48

XII
Figure 24: sample code that uses the trackball algorithm to track the position of the
green object .................................................................................................................. 49
Figure 25: serial device initialisation command; input arguments: host device name
(Raspberry Pi), serial port address, and baud rate ....................................................... 49
Figure 26: MiniCom used to input values to the serial port via SSH (left) and the
Arduino serial monitor echoing the data read (right). .................................................. 50
Figure 27: sample code snippet showing vertical (up and down) tilt commands within
the Pan Tilt Serial script ............................................................................................... 51
Figure 28: the Instrument Control Application Interface in MATLAB, showing the
data read/write operations sent to the Teensy via serial. ............................................. 52
Figure 29: (left) object centre and bounding box surrounding object; (right)
thresholded version of the image ................................................................................. 53
Figure 30: the point T (left diagram) corresponds to an equivalent point on an image
plane EFGH (the top of a frustum). The equivalent real-world plane in which T lies
maps out the base of a frustum, E’F’G’H (right). The frustum EFGH-E’F’G’H defines
the projection volume. Reprinted from [38]. ............................................................... 55
Figure 31: (top left) true-colour and thresholded image with tracked centre; (top right)
variation of x- and y- coordinates of tracked centre; (bottom left) variation of tilt and
pan angles; (bottom right) rate-of-change of pan-tilt angles ....................................... 57
Figure 32: Simulink scheme used to simulate the behaviour of the pan-tilt model ..... 58
Figure 33: the camera calibration parameters .............................................................. 61
Figure 34: The camera calibration session in MATLAB. The checkerboard is used to
train the calibrator (top), which generates a pattern-centric view that shows the
position of the camera in the different frames (bottom). ............................................. 62

XIII
LIST OF TABLES
Table 1: The project resources identified .................................................................................. 5
Table 2: Cost and risk assessment for the project ..................................................................... 6
Table 3: ATRON module [3], SMORES [9], AND HiGen [16] connectors and their
properties. ATRON image printed from [1]; SMORES image printed from [17]; HiGen image
printed with permission from C. Parrott. ................................................................................. 14
Table 4: Comparing three serial data protocols; SPI, I2C, and UART ................................... 35
Table 5: Tested Current Draws of Multiple Configurations using a 5 V 2 A regulated power
supply ....................................................................................................................................... 37
Table 6: List of components used within the vision add-on .................................................... 42
LIST OF EQUATIONS
Equation 1: the baud rate of the serial protocol for a word size of 12 and a 5 ms sample rate
................................................................................................................................................. 36
Equation 2: the pan and tilt angles obtained from the inverse pipeline method described in
[34] .......................................................................................................................................... 56
Equation 3: the visual servo (VS) problem as an error minimisation of the target feature w.r.t.
the current camera target. Reprinted from [32] ...................................................................... 59
Equation 4: the interaction matrix of the point x. Reprinted from [32] .................................. 59
Equation 5: image coordinates x and y defined in terms of the pixel coordinates (u and v), the
focal length (f), the camera centre (cu and cv), and the pixel ratio α. Reprinted from [32] ..... 60
Equation 6: the velocity of x in terms of the linear and angular components of the target’s
motion ...................................................................................................................................... 60

XIV
LIST OF ABBREVIATIONS
ABS Acrylonitrile Butadiene Styrene Plastic
bps Bits per second
CAD Computer-Aided Design
CAN Controller Area Network
CC Connector Controller
CNC Computational Numerical Control
DOF Degree of Freedom
FOV Field of View
fps Frames per second
GPIO General Purpose Input Output Ports
HDMI High-Definition Media Interface
HiGen High-Speed Genderless Actuation Mechanism
I2C Inter-Integrated Circuit
IoT Internet of Things
IP Internet Protocol
IR Infrared
JPEG Joint Photographic Experts Group (Graphics Format)
LiDAR Light Detection and Ranging
MATLAB MATrix LABoratory
MIPS Microprocessor without Interlocked Pipeline Stages

XV
MSR Modular Self-Reconfigurable Robot
NASA National Aeronautics and Space Administration
NoIR No Infrared Filtering
OpenCV Open-Source Computer Vision Library
PCB Printed Circuit Board
PSK Pre-Shared Key
PTZ Pan-tilt-zoom
RAM Random Access Memory
RGB Red-Green-Blue
RISC Reduced Instruction Set Computer Architecture
RMS Reconfigurable Manufacturing System
SBC Single-Board Computer
SOC System-On-Chip
SPI Serial Peripheral Interface
SSH Secure Shell
SSID Service Set Identification
TTL Transistor-Transistor Logic
UART Universal Asynchronous Transmit-Receive Protocol
UI User Interface
USB Universal Serial Bus
VGA Video Graphics Array
VS(PB)/(IB) Visual Servo(Position-Based)/(Image-Based)
WASD “W”, “A”, “S”, “D” keys
Wi-Fi Wireless Fidelity

1
Chapter 1 - Introduction
1.1. Background and Motivation
The concept of Modular Self-Reconfigurable Robots (MSR) has been an interest for
many different research groups and institutions. Research in this field has yielded
many unique implementations of multi-robot systems whose units can connect and
disconnect on demand, through actuated connector hubs, either autonomously or by
being joined and separated externally by an operator.
MSR platforms are commonly thought beneficial for modelling and simulating the
behaviours of self-assembling systems at different scales [1], including: enzyme-
substrate and hormone-drug interaction, programmable matter [2], insect swarm
systems [3], and several others. In addition, having a reconfigurable robot platform
could drive forward research in areas such as modular mobile robots [4] or
reconfigurable manufacturing systems (RMS) [5]. MSR systems have immense
potential in applications where cooperative robot behaviour is crucial, such as mobile
search-and-rescue, remote reconnaissance, and space exploration. Authors on this
subject recognize the potential of MSR and self-assembling robot systems, claiming
that once sufficient progress is made in their design as a whole, they will “cease to be
merely biologically inspired artefacts [sic] and become super biological robots” [6].
An MSR platform, however, is usually insufficient on its own - without some way of
showcasing, or indeed improving, its versatility. Often MSR systems are under-
equipped, with limited proprioceptive (internal) sensing and manipulation abilities;
the lack of exteroceptive sensors and manipulation tools limits their environmental
interaction and ultimately their effectiveness as robotic systems. Enter hardware
extensions (add-ons); they enhance the system capabilities by substituting their end-
effectors. For hardware extensions to work effectively with their intended platform,
they must comply with specific design criteria, dictated by the platform in question.

2
1.2. Problem Definition
The limited ability of MSR systems to perceive and affect their environment stands in
the way of practical realisations of such systems. Application-Oriented Hardware [1]
is therefore used to tackle this problem, by augmenting the robots’ sensory and/or
functional capabilities. To this end, a recent development at the University of
Sheffield, the HiGen Module [2], attempts to produce an MSR system which is
readily expandable through hardware add-ons. This project aims to further expand on
the applicability of hardware add-ons, through designing a complete multifunctional
add-on that could be readily integrated with the HiGen platform.
1.3. Aim of the Project
The aim of this project is to study, design, and build hardware extensions, or add-ons,
for an MSR platform currently under development at the University of Sheffield.
1.4. Objectives of the Project
The objectives of this project are:
1.4.1. Primary Objectives
Research the area of modular self-reconfiguring robots, and review the most
relevant implementations of MSR systems to date, including systems capable
of independent locomotion, heterogeneous systems, and systems with
hardware extensions (add-ons).
Research applications of MSR systems, including general and industrial
applications.
Design and program a hardware extension (add-on) to increase the sensing
ability of the MSR system under development.
Build, program, and test the hardware add-on.
1.4.2. Stretch Goals (Advanced Objectives)
Some advanced objectives have been outlined at the start of the project. However, due
to time constraints they were partially side-tracked to focus on the initial objectives.
Modify an existing hardware add-on to use in conjunction with the system.
Conduct experiments to ensure the efficacy of the hardware add-ons.

3
1.5. Project Management
This section details the initial project plan, subsequent modifications, and compares
the initial task outlines with the work actually done. It also presents several iterations
of the project Gantt chart, presented in Appendix A. In addition, it presents the
resources used throughout the project as well as the intended project phases against
what was actually implemented.
1.5.1. Initial Project Plan
A summary of the initial project tasks is presented below.
Stage 1: Project Specification and Research:
Determine the overall scope, project aims, and objectives of the project
Stage 2: Research, to include:
Research the history and implementations of MSR systems, including those with
extensions (add-ons).
Research potential applications of MSR hardware extensions.
Research required components for implementation of the hardware extension.
Stage 3: Design, encompassing the following areas:
Learning SolidWorks and using it to design the first add-on.
Ordering components for the first add-on.
Designing the second add-on.
Ordering components for the second add-on.
Stage 4: Build and Test, including the following tasks:
Building the controller and camera for add-on 1.
Assembling the controller and camera.
Building and assembling module 2.
Testing the modules with the HiGen connector hub.
Stages 1-4 have been executed in mostly the same order. However, due to the lead
time associated with acquiring, designing, and testing certain components, the second

4
add-on design was not completed. The design methodology to create the secondary
add-on was investigated and some prototyping components acquired.
1.5.2. Project Resources
Table 1 shows the project resources involved and their availability. Appendix 2
contains a spreadsheet of the resources acquired for this project to date. The list
comprises the main components and the dates they were ordered and collected. The
spreadsheet also contains the project budget so far, the amount of money spent and
the total funds remaining. In a bid to pre-empt lead processing and/or delivery
schedules for certain parts, components were acquired much earlier than they were
needed.
Despite the careful consideration of different factors associated with the project, some
resources, such as the module connector, were not provided in time. Tasks based on
the integration of these resources in the project could therefore not be completed.
However, the associated design factors have been considered throughout the
development of the project. This will be further illustrated in Chapter 6.
1.5.3. Costs and Risk Assessment
The hardware nature of the project meant that access to the laboratory facilities was
essential for project completion. In addition, certain tasks, such as early prototyping
and testing of components, required the use of electric power supplies which are a
safety concern if mishandled.
Table 2 shows the project costs in terms of time and financial resources, as well as the
risk associated with them. Furthermore, the table outlines the risk associated with
some of the project deliverables, such as the hardware add-on development and
subcomponent assembly and integration.

5
Table 1: The project resources identified
Resource Description Availability
Peo
ple
Student Responsible for completing the project Y
Supervisor Provides guidance on how to approach the project Y
Second Reader Provides feedback when required Y
Technical Support Laboratory staff responsible for providing access to tools and equipment Y
PhD Project Consultant Provides design consultation and guidance to establish project specifications Y
Tec
hnic
al R
esou
rces
Computer Developing the source code for various parts of the add-on and Y
Additional Components Peripherals for initial setup/configuration of the add-on Y
Software Designing the hardware, electronics, and programming/control for the add-on Y
3D Printer Printing the hardware components Y
Robot and add-on
Connector
The MSR robot and the connector used on-board the robot add-on, designed and Produced by C.
Parrott N

6
Table 2: Cost and risk assessment for the project
Resource Risk Risk Outcome Risk Level Mitigation Strategies
Student time Time mismanagement
due to internal/external
circumstances
Not completing the
tasks required
High Plan work beforehand; set achievable
targets; schedule tasks efficiently to
minimise lead times.
Supervisor time Absence due to external
circumstances
Not providing
necessary
guidance/feedback
in a timely manner
High Attend regular meetings to give progress
updates; promptly send queries over email
when in-person meetings are not feasible.
Primary project
resources
Component loss during
delivery/transit;
Delays due to part
replacements or
reproduction
High Ensure prompt communication with
suppliers regarding missing or damaged
components;
Primary/Secondary
project resources
Mishandling/misplacing
components
Damage to
components, other
resources, injury, or
death
Very High Ensure parts are always used according to
instruction manuals; always store
components in safe places away from
damage; store components directly after
use
Laboratory
facilities, e.g.
tools, power
supply, 3D printer
Mishandling/misuse of
equipment
Damage to
equipment or other
resources, injury
Very High Ensure equipment is always used
according to instruction manuals; ensure
appropriate technical support is always at
hand during operation of new equipment
Software Damage to computer Loss of current
project work and/or
software packages
Med. Ensure regular backups of any critical
work; store project files in a safe place;
store backups in multiple places; document
required software resources and setup
procedures

7
1.5.4. Project Plan
Appendix 1 contains an updated version of the project Gantt chart illustrating how the
project will be continued and what has been achieved. As with every project, the
initial plan is seldom fully followed through due to factors outside of the control of
the person(s) responsible for it. In this project, this was due to an incomplete
awareness of what the project would involve in terms of design work. Initial estimates
of the timeframe for hardware design, including SolidWorks modelling, PCB design,
hardware assembly, and part updates, took up to three weeks longer than scheduled.
Nevertheless, some of the outlined project objectives have been met as scheduled by
reordering the outlined tasks to be conducted at a different date.
While most of the components were ordered at the correct timeframes, the process of
ordering the PCB required an additional three days due to miscommunication during
component requisition. This, however, did not impede progress in terms of developing
the software for the microcontroller.
1.5.5. Design Implementation
A breakdown of the design stage with its independent phases is shown below.
Phase 1: Hardware Implementation: This involved the 3D-design, prototyping, and
construction of the mechanical assembly of the module, including the module pan/tilt
unit and the enclosure for the system electronics. This phase involved developing
early design prototypes in SolidWorks, and subsequently verifying them with C.
Parrott. This stage also included the development of control and actuation
mechanisms for the add-ons, as this determined subsequent features required on the
electronics. This phase required a working knowledge of CAD design, to which a
considerable amount of time was dedicated.
Phase 2: Electronics Implementation: At this stage, the electronics of the first add-
on were prototyped, designed, connected, assembled, and tested with the on-board
computer. This phase entailed developing the schematic layout for the tool expander,
as well as the CAN bus connection between the main controller and the tool
controller. In addition, the second add-on electronics shall be prototyped and
programmed.

8
Phase 3: Software Implementation: For the first add-on, the on-board controller and
its peripherals are selected, and the image acquisition and processing software is
designed. This phase has been partially completed; a connection between the main
controller and the workstation computer has been achieved, and a video stream has
been accessed remotely (from the workstation). The next part of this phase is to
develop the image processing software for the add-on. Research shall be conducted on
image processing, including the most useful applications for mobile robotics and
MSR systems, and methods of implementation on the add-on.
The actual design process involved reordering these phases, as it was discovered that
the chassis (hardware) design of the first add-on would dictate where the other
components would fit within the module. Therefore, the hardware 3D design was
carried out first, then simultaneously focusing on the electronics implementation and
low-level software development.
1.6. Structure of the Report
This report is outlined as follows. Chapter 2 gives an overview of the research
conducted in the subject of MSR systems. This includes an overview of their general
properties, applications, and design challenges. The chapter also introduces the HiGen
connector and the MSR system under development, for which the add-on is designed.
Chapter 3 details the hardware design phase, including the process of requirements
capture, early concept prototyping, general design considerations, and the add-on
design. This encompasses the design of the hardware subcomponents, including the
add-on body, the internal mechanisms, and the on-board electronics. Chapter 4
outlines the software development process for the add-on, including initial setup and
configuration, networking, low-level hardware testing and interfacing, and
subcomponent integration. Chapter 5 demonstrates the applied hardware and
software integration, through data acquisition, developing an image tracking model
based on existing techniques, and analysing this model. Finally, Chapter 6 concludes
the report and gives an outline of further work to be done in the future.

9
Chapter 2 - Literature Review
The concept of Modular Self-Reconfiguring Robots (MSR) has been an interest for
numerous different research groups and institutions. Research in this field has yielded
many unique implementations of multi-robot systems whose units can connect and
disconnect on demand, through actuated connector hubs, either autonomously or by
being joined and separated externally by an operator. However, an equivalent amount
of research has emerged attempting to assess the potential of MSR platforms in terms
of real-world applications.
This chapter highlights research endeavours in modular self-reconfiguring robot
systems, from their initial conception and a brief general history, to early
developments including a host of systems that have been designed for different
problems and use cases. It also introduces MSR systems with hardware add-ons and
Reconfigurable Manufacturing Systems (RMS). Next, the chapter illustrates some of
the implications of MSR system design as well as the challenges facing such systems.
Finally, the chapter introduces the HiGen connector and MSR system, for which the
hardware add-ons have been designed.
2.1. Modular Self-Reconfigurable Robots: A Brief Overview
In the 1940’s Alan Turing introduced the concept of a universal computation device
[1], one that could perform any task required through reprogramming. By the 1970’s
personal computers had gained significant traction within the consumer goods market,
ushering in a new age of innovation through technology, consequently fulfilling
Turing’s vision. Successive advancements in computer technology have driven
numerous innovations in mobile robotics, and in turn, small-scale mobile robots.
1988 marked the first theoretical implementation of a dynamically reconfigurable
modular robot, one that could be constructed from basic ‘cells’ or ‘modules’ and
reconfigured autonomously as per the desired use case [3]. Following on from these
theories, many research groups have successfully built and simulated robotic systems
comprising basic modules capable of different types of reconfiguration.

10
As of 2014 there have been at least 40 different implementations -and counting- of
MSR systems, with each system aiming to address a specific set of design challenges.
These challenges encompass novel connector designs, unique control methodologies,
or improved communication, to name a few. It is worth noting that some of these are
iterations of previous systems.
2.2. Modular Self-Reconfigurable Robot Systems: Taxonomy and Attributes
MSR platforms comprise basic building blocks that can reconfigure into different
shapes to perform the desired task. A single module contains all the working internals
of a robot: sensing, actuation, battery, and processing power. Though virtually useless
as individual robots, MSR platforms draw their immense potential from scalability;
ten, even hundreds, of modules can combine together in any configuration forming
rigid, complex structures and functional limbs. An example of a MSR platform, the
ATRON self-reconfigurable robot [4], is shown in Figure 1, with individual modules
combined into different configurations.
MSR systems are classified into three main archetypes: pack robots (consisting of
dozens of robots within the same system); herd robots (with several hundred modules
per system); and swarm robots, whose numbers are typically many thousands of units.
The significance of each module within the system decreases proportionally with the
size of the MSR population; pack robots are the most dependent on the actions of
each individual, whereas in large swarms of robots no particular attention is paid to
single modules, much like natural swarm systems.
Another method of classifying MSR platforms is based on their reconfiguration
abilities. The robots are said to be reconfigurable if they can be
connected/disconnected and combined into different configurations; dynamically
reconfigurable, if they can disconnect /connect while modules are active (hot-
swapping); and self-reconfigurable, if they can be connected/disconnected
autonomously, without external aid.
This section introduces the general attributes of MSR systems, including their
morphology, locomotion classes, control, connector design, and communication
methods, with references to existing implementations.

11
Figure 1: the ATRON self-reconfigurable robot combined into a snake configuration (left), a
vehicle-like configuration (right), and an intermediate configuration (back). Printed from [3]
2.2.1. Morphology: Lattice, Chain, and Hybrid
MSR systems are commonly characterized using their morphology [1], which is
primarily concerned with how the robots are assembled into structures. Chain-systems
are where the individual robots combine together end to end in chain-like shapes,
trees, and loops in some cases. Lattice-systems, such as Fracta [5] and the
Metamorphic Robot [6], are examples of predominantly planar (2D) architectures
where each robot unit is connected to two or more units, consequently requiring
multiple connection points. Robots in a lattice only connect in discrete points in the
configuration, akin to how atoms combine to form structural lattices. Hybrid
architectures, such as the ATRON [4], also exist where combinations of chain clusters
and lattice structures could be formed using the same basic building blocks [7]. Such
systems allow multiple legs to assemble, providing greater locomotion versatility,
whereas lattice arrangements allow rigid support structures to form, improving the
stability of the whole system, in addition to facilitating self-reconfiguration tasks. For
these reasons, hybrid architectures tend to prevail throughout MSR designs.
Determining the intended morphology of the system is a consideration that takes form
at the module and system level alike. As shown in figure 2, Stoy et al. have
demonstrated that the MSR morphology largely dictates other aspects of the design
[4]. The fact that most morphologies tend to be hybrid slightly simplifies this from a
mechatronic design point of view, but might cause a plethora of challenges for control
design. This will be discussed later in this section.

12
Figure 2 showing the components involved in robot design and their interaction. Adapted
from [8]
2.2.2. Locomotion Modes
A crucial design element for MSR platforms, and perhaps one of their most
advantageous traits, is the various locomotion modes they inherently support through
reconfiguration [3] [8]. Some MSR systems have been created to have independently
mobile modules, such as M3Express [9], SMORES [10], M-TRAN [11] and PolyBot
[12] [13], whereas most are only capable of propulsion in clusters [4]. Many MSR
systems can form into different configurations capable of varying locomotion modes.
For example, ATRON [4] can form snake-like or “wheeled” robots, and M-TRAN
can form into multi-legged configurations. Kutzer et al. proposed a MSR design with
a hybrid morphology, whose modules were capable of self-propulsion on disc-shaped
connectors that doubled as wheels [9]. Those could be used to propel individual
modules or a large multi-robot cluster.
Another interesting prospect for MSR locomotion lies in the individual flexibility and
self-locomotion of the modules combined with the structural support and rigidity of
the MSR as a whole. Within a large cluster or multi-robot, robots could move from
the back of the configuration to the front, or holes move to the back of the robot,
creating what is known as cluster flow [14], moving the robot in a specific direction.
Several examples of cluster flow exist in MSR platforms, both physical and
simulated, some of which have been reviewed in [15]. Similar behaviour is exhibited
in real-life insect swarm systems such as ant colonies, whereby ants form into large
structures that self-propel across a terrain or conform around an obstacle to navigate
their path.

13
The locomotion versatility of MSR platforms proves invaluable in the presence of
unstructured environments, making them ideal candidates for space exploration,
reconnaissance, or remote search and rescue tasks. However, until certain design
challenges are mostly overcome, these benefits remain largely hypothetical, save for
the few example MSR systems that have demonstrated animal-like locomotion.
Cluster flow and task-based growth are examples of challenges that might be
overcome once single modules are efficient enough.
2.2.3. Control
Self-reconfiguration control in MSR systems poses a significant multi-layer
challenge. At the module level, control of on-board mechatronics to arrive at the
desired configurations requires a complete understanding of the system kinematics,
posing a hardware challenge of itself. The obvious solution to this problem is to
restrict the DOF count on each module, rendering them simpler but less versatile.
Even controlling chains of simple 2DOF modules becomes challenging from a
software perspective. Adding an extra module increases the difficulty of docking two
units at different points together, as arm, and therefore chain, poses grow less singular
and more error-prone with each joint added [1], unless direction constraints are
employed. This increase in complexity degrades the computational efficiency of the
controller in question. For embedded controllers, this becomes even more
challenging, as individual robots are, by design, often limited in terms of memory and
processing power.
Globally, it is not feasible to instruct all modules to converge to a certain
configuration; however, it is possible to guide them to incrementally approach one
another, thereby allowing them to reconfigure [1]. Some researchers proposed control
paradigms by which only certain modules performed the required control action; the
surrounding modules then use their internal models to “follow suit”, effectively
enabling the modules to form the desired configuration or execute cluster flow. This
leader-follower approach has been adopted by Stoy and Nagpal [16].
Control of individual modules is almost only necessary in cases where precise self-
reconfiguration is required, for example if the end-goal is to reconfigure into a
specific shape, such as an arm or leg for locomotion. However, for some tasks such as

14
cluster flow locomotion and task-driven growth, it might not be entirely necessary, or
indeed feasible, to control individual robot modules.
2.2.4. Connector Design
A fundamental hardware challenge for MSR platforms lies in the design of robust
connectors capable of lifting multiple units in series, with minimal actuation time. Of
great importance, as well, are the modules’ having a simple alignment mechanism and
control implementation. Genderless connectors excel in comparison to the other
methods. Connectors can be mechanical, electromagnetic, or magneto-mechanical,
though other methods have also been used.
In [2] Parrott et al. compared three classes of connector designs: gendered, where
male connectors latch onto chassis parts by means of hooks or pins; bi-gendered
(hermaphrodite), where pins/hooks latch into connector grooves; and genderless,
where two hooks latch together. Table 1 presents some different connectors that have
been implemented, comparing their properties.
Table 3: ATRON module [4], SMORES [10], AND HiGen [2] connectors and their
properties. ATRON image printed from [1]; SMORES image printed from [17]; HiGen image
printed with permission from C. Parrott.
Robot
System ATRON SMORES HiGen
Connection
Mechanism
Mechanical Magneto-Mechanical Mechanical
Connector
Gender
Gendered (male
hooks attach to
female slots)
Bi-gendered (modules
have in-built features
of both genders)
Genderless
(connecting faces
have identical
interlocking hooks)
Connector
Face
(Pictured)

15
2.2.5. Sensing
Numerous experiments conducted on MSR platforms aim to understand how capable
the modules are of cooperating under various circumstances. The limited capabilities
of MSR platforms in the way of exteroceptive sensing consequently limits their task
execution abilities. Most MSR systems are restricted to using a few types of
exteroceptive sensors (that measure external environmental variables such as
temperature, humidity, light), save for SWARM-bot [18] which employed various
exteroceptive and proprioceptive sensors. Consequently, if the robots were to affect
their external environment, some way of enhancing their awareness of their
environment is crucial for cooperation, particularly in unstructured settings. Several
researchers have devised non-vision solutions to tackle the problem of self-
reconfiguration, one of the most challenging aspects of MSR implementation.
Payne et al. [19] propose localization based on elliptical approximations to estimate
probable robot locations. While their algorithm is fast and light, producing robust
estimates of robot locations from one Infrared sensor per robot in a few samples, it is
sensitive to varying light intensities and is therefore less effective in environments
with varying lighting. Furthermore, the availability of cheap low-power
microprocessor and memory modules renders computational requirements trivial, so
embedded robust sensing can easily be exploited.
2.2.5.1. Vision: Motivation
Vision presents itself as a suitable candidate due to its simple implementation and
relatively well-understood requirements. A multitude of different camera technologies
that can generate medium-resolution, high-speed video or MJPEG (a sequence of
JPEG images “stitched” together to form low-framerate video) do exist, rendering the
task more manageable. Simple implementations of camera-based navigation use low-
level image processing to guide the robots’ decision-making with respect to the
environment, or based on the task at hand.
2.2.5.2. Vision: Implementation
In experiments by Yim et al. [20] [21], the CKBot system used smart camera
attachments on three module clusters (each cluster comprised four modules connected
together) to form a bipedal robot. Each camera comprised a VGA imager, an Analog

16
Devices Digital Signal Processor, a 3-axis accelerometer, and a wide-angle signalling
LED. The camera communicated with the robots over a CAN bus, and the robots
could be fitted with Bluetooth transceivers for wireless cluster intercommunication.
The module also featured an independent power supply, increasing the duration of its
usability. It was screwed to the robot cluster, as opposed to using the magnetic
connectors on-board the modules. To test the effectiveness of this vision and
signalling platform, the robot was forcefully separated (or exploded) by a kick from
the experimenter. Using visual servoing, the clusters autonomously scanned the scene,
detected LED signals from the other robots and moved towards them. The clusters
successfully regrouped, realigned and reconnected into their previous configuration.
Vision has also been implemented within the CONRO system [22]. The researchers
have devised a simple CMOS camera sensor that could be attached to some of the
robot modules. The module was capable of capturing 8-bit monochrome images at 30
fps. While the modules did not have the computational capabilities to capture or
process the image at the time, it was a step forward in empowering simple MSR
robots with camera sensors.
Simple 2D-vision is not the end goal, however. Some experts suggest using multiple
MSR clusters to create 3D maps of their surroundings using inexpensive cameras and
IR transceivers, as opposed to expensive sonar or LiDAR (Light Detection and
Ranging) sensors. This would be practical in applications where creating a 3D map of
an inaccessible environment is required, such as in a collapsed building, inside a tank
or cave. Powerful and inexpensive computers would allow sophisticated image
processing software to be embedded, and enable the robot to do more with the data
collected.
2.2.6. Communication
Many MSR platforms employ multiple communication modes between robots to
allow them to cooperate and navigate unforeseen obstacles. Robust communication
enables efficient use of sensory data. In addition to redundancy, which pre-empts
potential failures and provides fall-back routes, the communication methods
employed might be desired for specific tasks. For example, aside from a Controller
Area Network (CAN) bus using the Robotic Bus Protocol for data transfer between
robot modules, the CKBot modules [20] supported optional Bluetooth inter-cluster

17
communication. A similar principle has been adopted with the HiGen module. This
will be discussed later in the chapter.
The communication modes used are typically chosen based on factors such as desired
range, latency, implementation simplicity, and system control requirements. For task-
dependent communication, attention must be paid to how these decisions would
influence the robot’s ability to conduct its task in the real world. For example, a
particular mode of communication might have a sufficient range in open spaces, but
be susceptible to attenuation in enclosed areas or in the presence of large obstacles.
Selecting a powerful and versatile communication platform is therefore a crucial step
in MSR design, to ensure the robot can perform its task without interruption.
2.3. Heterogeneous MSR Systems
The use of swappable ‘quick change’ tools on CNC milling machines could be
loosely regarded as the first practical implementation of a reconfigurable robot system
with an add-on. In 1988, the first implementation of a self-assembling robot, formed
of heterogeneous modules, the CEBOT (short for cellular robot), was achieved by
Toshio Fukuda [3]. He devised a system comprising three types of units; Type 1
locomotion modules (joints or wheels); Type 2 structural (branching or power)
modules; and Type 3 functional (tools or grippers) modules. Later robots build on this
concept, but attempt to combine the structural and locomotion aspects, effectively
producing modules with actuated DOFs, power sharing and multiple connector hubs
all in one. Functional modules, however, remain mostly separate and are designed to
be changeable depending on the task required.
2.3.1. MSR Systems with Hardware Attachments (Add-ons)
Stoy et al. describe the implementation of “application-oriented hardware”, or
hardware add-ons, as one of the crucial steps towards realising practical MSR
platforms [1]. It is well recognised that practical implementations that use hardware
add-ons make the robot platform less homogeneous in nature. However, as long as the
majority of the robot is composed of identical modules, barring the add-ons, the MSR
would still qualify as a homogeneous system.
The AMOEBA-I platform [23] is an example of a robot system which, while shares
some common features with MSR systems, cannot be classified as such. Instead this

18
system sacrificed the prospect of homogeneous structural self-reconfiguration for
practicality. The robot’s chassis could be rearranged into different shapes, and it made
extensive use of hardware attachments to vary its suitability for certain tasks such as
search and rescue or military reconnaissance. The robot could employ different
configurations of tires or treads to increase its locomotion versatility, and had
functional add-ons which could be attached to various parts of it.
In a similar vein to Fukuda’s early visions, Akin et al. propose MORPHbots [24], an
MSR with anthropomorphic robotic manipulator arm linkages with interchangeable
end-effectors, to assess the space exploration capabilities of MSR systems. The 6-
DOF arm with a genderless connector had a spherical workspace. Impressively, at just
10 kg, it was capable of tasks an astronaut in a pressure suit would normally execute.
MORPHbots featured three component types: modules, providing manipulation
capabilities (such as pitch/yaw and prismatic actuators); nodes, serving as branching
points and can also provide additional networking hubs and computation capabilities;
and packs, providing additional services (battery packs, power generation, sensors,
tool carriers, or communications devices). These components (modules, nodes, and
packs) then combine together into entities, grouped together into a system.
Using similar principles, Researchers in [25] developed Thor: A heterogeneous MSR
system with eight different module types: motors; cubic nodes (with six hub
connectors); rotation 165 (capable of rotating ±165°); angle 90; wheel; gripper;
battery; and wireless. These are some implementations resembling what Yim et al.
call a “box of stuff” [26], which could be likened to a robotic Swiss army knife.
While the idea of dedicated functional units that provide only the necessary
functionality is attractive for well-understood applications, it may prove unnecessarily
restrictive. It could result in a more complex overall implementation as systems would
require multiple entities, each of which responsible for one part of a multi-task
mission. A system would be rendered useless against a particular task without
precisely the right attachment(s) equipped, so it would not be suitable for stochastic
environments. Conversely, designing the components as multi-purpose tools would
increase versatility at the cost of implementation complexity.

19
2.3.2. Reconfigurable Manufacturing Systems (RMS)
Drawing on inspiration from MSR systems such as PolyBot [12] [13], and
particularly the work of Fukuda on CEBOT [3], Chen proposed a heterogeneous
system of workcells [27] that could reconfigure according to the demands of the
production line, as opposed to using traditional single-purpose manipulators or
manufacturing lines. The workcells comprised passive joint modules which also
contained sensors for accurate positioning and internal measurements, and various
active actuation modules, such as prismatic and rotational joints. His intended
customers were high-mix and low-volume manufacturers who required their
production facilities to quickly adapt to the market.
Chen successfully demonstrated the versatility and reconfiguration capabilities of his
RMS by constructing and showcasing a light machining prototype system at the
International Industrial Automation Exhibition in 1999. Provided they were capable
of kinematic efficiency similar to traditional industrial robots, RMS’s would be
beneficial to medium scale manufacturers – so long as their large initial investment
cost could be justified [28].
2.4. Design Challenges of MSR Platforms
According to most experts in this field, the problem of optimizing MSR design,
including which features to incorporate, is dependent on the intended application of
the system [1]. It is largely accepted that a “killer application” [26] that would help
specify strict design goals for MSR platforms has not yet been discovered, making the
problem much more difficult to characterize. Few systems have therefore been created
with the goal of optimal design in mind. SuperBot [7], a University of Southern
California platform created in 2006, was an MSR whose design goals were focused
towards optimality. This prominent example, partially funded by NASA and the US
Army Research Office, featured rigid, robust modules, each of which had 3 degrees of
freedom (DOF), an array of exteroceptive sensors, and fault-tolerant adaptive control.
While a lot of practical results have painted MSR platforms in a ubiquitous, all-
purpose light, it is important to acknowledge their shortcomings in certain areas.
Those are most notably computational weaknesses, design challenges, exteroceptive
deficiency, and control-related challenges, such as autonomous self-reconfiguration.

20
This section discusses some of those challenges and presents ways to deal with them
within MSR design. Once these have been fully addressed by the researchers
involved, implementations of MSR systems will start to verge on the ideal picture
most commonly depicted in science fiction.
2.4.1. Computational Limitations
Firstly, most such platforms are severely restricted in terms of their computational
real-estate. Owing to the specific niche application areas, MSR platforms and their
accompanying extensions do not typically feature computationally powerful
components. At most, some systems have been able to demonstrate some degree of
high-level data manipulation in the form of image processing, an arguably taxing feat
using the proposed implementations. In the case of the CONRO robot, for example,
the researchers were not capable of capturing, let alone storing, an image directly on
the robot [22].
Memory bottlenecks and fragmentation are some other likely outcomes in systems
whose programming is ad hoc. Memory mismanagement could cause frequent crashes
which are to be avoided at all costs if precise self-reconfiguration is the ultimate goal.
Furthermore, for the tasks of surveying or data collection, the robots would have very
little, if any, available storage to retain any data recorded. In a practical scenario, it
might not be feasible to live-stream data, especially under strict limitations of
available power; periodic data collection could therefore be the only viable option,
and full access to the data could only be attained on retrieval of the robot.
2.4.2. Power Sharing
Power sharing is one of the potential benefits of MSR platforms, yet it remains an
elusive goal to many researchers in the field. To this date, power sharing across an
MSR system is a huge obstacle to robust and efficient self-reconfiguration. Several
implementations have used external connecting wires to emulate power sharing,
though few have been successful at embedding power-sharing functionalities within
the MSR’s connectors.
Challenges lie not only within the design of the electrical and electronic infrastructure
of the MSR itself, but also within optimising the design of the connector mechanisms
to allow for reduced energy expenditure while maintaining sufficient actuation power.

21
This means that connection mechanisms must be designed with maximum connection
speed as a main goal, to reduce the energy cost of reconfiguration.
Another hurdle is the availability of battery technologies capable of sustaining
prolonged operation as well as enduring repeated discharge and recharge cycles.
2.5. The HiGen Modular Robot
This section introduces the HiGen module [29], along with the connector design
which serves as the connection point between the robot and the add-on.
2.5.1. The HiGen Module and Connector
The add-on is being developed to be used in conjunction with the HiGen module, a
140 mm × 140 mm spherical-shaped robot, featuring four HiGen connectors. As
discussed earlier, the genderless nature of this mechanism allows single-sided
connect/disconnect, and outperforms other connector implementations in terms of
actuation speed and efficiency [2]. Figure 3 shows the connector (left) and a single
robot module (right) equipped with four connectors. To ensure the add-on would be
compatible with HiGen module, the hardware choices and implementation method
were agreed with Christopher Parrott, the PhD candidate responsible for the HiGen
module design.
Figure 3(a) and (b): standalone HiGen connector module (left) [20] and HiGen modules on
the self-reconfigurable modular robot (right) [28]. Printed with permission from C. Parrott,
2014.

22
2.5.2. HiGen Connector Architecture
The add-on module infrastructure is composed of three main components: The Single-
Board Computer (SBC), responsible for image acquisition, processing,
communication to the workstation, and decision-making; the connector controller
board (CC), a low-level controller to interface directly with the connector; and the
Tool Expander board, serving to mediate between the brain of the module (the SBC)
and the connector controller.
Figure 4: (left) the HiGen connector broken down into its components, showing the (a)
housing, (b) docking hooks, (c) motor and switch mount, (d) drive shaft, (e) shroud, (f)
connection board, and (g) DC geared motor; (right): the controller and its functional pins.
Both images printed with permission from C. Parrott, 2016.
Figure 4 shows the CC, the circuit which contains and manages the connector
functionality. In addition to joining two connected faces via CAN bus (labelled the
communications header), the CC has been designed to be an executive controller for
low-level hardware add-ons. The functionality of this circuit reduces to relaying
control signals to the recipient devices.
2.5.3. Controller Area Network (CAN)
The CAN bus enables low-bandwidth, low-latency communication between robots
within a limited neighbourhood. Simple status messages of position and orientation,
in addition to robot ID, could be exchanged between robots via Bluetooth. This
network was designed to facilitate communication between robots not directly
connected to one another.

23
The CAN bus uses a 5 V power and ground line pair, a HIGH and LOW CAN signal
pair, and Signal Data and Clock lines.
2.5.4. System Architecture
An overview of the multi-robot system, comprising a robot connected to an add-on
and multiple other robots, is pictured in Figure 5. The system network encompasses
the robots, the add-on, and the workstation computer used as the point of contact
between the robot and an external user.
The robots are connected together via the HiGen connector which enables
communication over the Connector Area Network (CAN). Connected to each HiGen
module is a Connector Controller (CC), a circuit which manages the electronic
interface between two connectors joined together. Therefore, this assigns the CC the
role of communication router between one side of the connector and the
corresponding side; this side could be an adjacent robot or an add-on, as shown in the
figure.
Figure 5: the overall system architecture, showing the communication pathways between
different system elements. The HiGen robot modules interface with each other via the
connector controllers (CC), which connect together to form a CAN bus.
The following chapter outlines the process of designing the add-on to be integrated
with this system, using the network architecture as the basis for many of the add-on
requirements.

24
Chapter 3 - Hardware Design
The hardware design encompasses two main areas; the chassis design (the enclosure
for all the electronics components and the pan-tilt mechanism), and the electronics
design (the Raspberry Pi, the tool expander board, and the connector controller).
Firstly, this chapter introduces the design requirements for the hardware extension,
including functionality, performance, compatibility, and usability. In addition to
presenting early concept prototypes, this chapter outlines the process of designing the
custom-built components, presents arguments for certain design choices including
component choices, and presents the final hardware design and all of its components.
3.1. Design Requirements
From the literature review conducted in the previous chapter, it was decided to use
vision as the primary method of sensing based on which the add-on would be
constructed. The add-on would be used in a similar fashion to those designed by Yim
[20] and Castano [22].
Before the design process could commence, it was important to fully define the
problem to be solved. Specifically, the problem was combining the basic elements of
an add-on for the HiGen MSR to constitute a vision add-on. This vision add-on would
use a camera to detect an object and identify its location within an image frame,
following which it could track it using its on-board actuation. The add-on would be
attached to the robot through a standardised connection method, through which it
would be able to interface with the robot and hence communicate with the rest of the
system.
3.1.1. System Definition
The system being developed is the robot add-on and its subcomponents. The add-on is
a component designed to interface with the robot platform currently being designed at
the University of Sheffield. The scope of the system is the individual add-on and its
subcomponents. The system is part of a larger system comprising the robot/platform

25
to which the add-on is connected and multiple robots with which the add-on could be
integrated.
3.1.2. Physical Characteristics
The add-on shall comprise a hardware assembly of various mechanical
components and electronics.
The mechanical components shall comprise to the add-on enclosure, the pan-
tilt servo configuration, the pan-tilt attachment, and the passive connector.
The hardware assembly, in its entirety, shall fit within a cylinder of a
maximum diameter of 140 mm. The height of the hardware assembly shall not
exceed 140 mm at the highest point.
The electronics shall comprise the on-board computer, the microcontroller, the
tool controller, the connector controller, the communication device, the
camera board, and the additional peripheral devices connected.
The electronics shall contain a full communication pathway between the robot
and the add-on.
The add-on shall contain a pan-tilt camera configuration.
3.1.3. Performance Characteristics
The pan-tilt configuration shall allow for ±180° rotation on the pan-tilt axes, to
attain the largest field-of-view (FOV) in each frame.
The add-on shall be able to recognise an object up to two metres away.
The add-on shall consume no more than 5 V rated at 2 A.
The add-on shall be able to capture still images of up to 1024 × 980 pixels.
The add-on shall be able to stream live video up to 15 fps.
3.1.4. Compatibility
The add-on should be designed to accommodate for alternative modes of operation;
either at the front of a MSR robot, or attached to the side of a robot.
3.1.5. Usability
The add-on shall be designed to acquire data from the environment, extract relevant
information, and route the information to the correct target device.

26
3.1.6. Early Concept Prototyping
Having established the need for exteroceptive sensing, research was conducted into
how image acquisition on an embedded system could be achieved. Various resources
outlined the methodology used to acquire images from a camera connected to a
microcontroller. Several other resources were examined to identify potential
applications of this acquired imagery. In the applications of remote search and rescue,
a useful feature to possess would be online video processing and object identification.
In addition to determining vision as the method of sensing to be used on-board the
add-on, research was conducted to determine how streaming large amounts of data
over a low-bandwidth network could be implemented. However, most resources
favoured using a high-speed Wireless Local Area Network (WLAN) to stream such
data, and limiting the other networks to basic neighbour-to-neighbour communication
for low-level data exchange. The CAN bus connecting the add-on to the robot(s)
could be used for this purpose.
Following this initial research, a stage-zero concept prototype was developed. This
prototype comprised a serial TTL JPEG camera bread-boarded to an Arduino Uno.
The Arduino was connected to the computer via a USB serial cable. In order to
acquire an image from the camera, a basic serial communication software package
was used. However, this method failed to acquire any useful image output. Figure
6shows the breadboard layout of the aforementioned prototype.
Figure 6 : the Arduino connected to the TTL JPEG Serial Camera via breadboard

27
3.2. Chassis Design (Mechanical Design)
The process of designing the chassis required an in-depth understanding of how the
components of the add-on fit together, as well as how they integrate with the overall
MSR platform. The design process included various considerations, and underwent
several iterations, both conceptual and physical, to arrive at a final configuration.
Appendix I shows some of the early model prototypes, some of which have been
abandoned partway due to infeasibility.
The chassis was designed and rendered in SolidWorks and manufactured using 3D-
printing. The chassis includes a variety of components: the main enclosure in which
all the subcomponents are assembled, the passive connector to which a robot
connector attaches, a top ‘lid’ on which the pan-tilt servomechanism is attached, and
the actuated pan-tilt module, comprising the pan motor, the tilt motor mount, the tilt
motor, and the camera mount. A full breakdown of the hardware components used on
the add-on is provided at the end of the chapter (section 3.8).
3.2.1. Enclosure Design
Figure 5 shows the enclosure design. The enclosure comprises a 75x75 mm octagonal
shell with diagonal mounting holes at the top, joined to a round base with an outer rim
at its top. The outer rim, used to align the add-on with a docking station, is a round
section measuring 81 mm across with four segments trimmed. The round base of this
component is based on an existing attachment template which dictates the mounting
hole placements and base diameter for the passive attachment. This template, shown
in figure 6, was used by Parrott for some of his add-on designs.
Figure 7: the attachment template based on which the enclosure has been designed. Courtesy
of Parrott

28
Figure 8: the full add-on assembly. Not shown: camera ribbon cable or servo wires
It was desired to leave access points to the essential Raspberry Pi ports in case any
were required during programming or testing without having to remove the top lid. In
addition to the mounting holes for the top attachment and the passive connector, the
enclosure had mounting holes for the Raspberry Pi computer. The enclosure also had
three rectangular holes on two of its faces. The two left holes corresponded to the
positions of the power inlet and HDMI port on the Pi respectively, whereas the back
hole corresponded to the USB port in which the Wi-Fi adapter is plugged.
The main principle was to use a common template on which future add-ons could be
based. This greatly simplified the process of designing an attachment point for the
passive connector face, a design that is used throughout the multi-robot system. This
also allowed the electronics on-board the connector to retain their configuration
regardless of which add-on was connected to it. These considerations have played a
role in maintaining design modularity, a critical aspect spanning the system design as
a whole.
3.2.2. General Design Considerations
3.2.2.1. Material Cost
The hardware chassis was designed with the cost of 3D-printing material in mind.
This consideration was cause for several changes within the design iterations, as it
was more favourable to reduce the amount of ABS and support material being used.
The printer used a soluble support material to be deposited where gaps existed in the
model, so it was important to reduce the size of those gaps within the design, even at

29
the expense of potentially complicating the assembly sequence or increasing the
overall number of hardware components.
3.2.2.2. Sturdiness/Robustness
It was more preferential to come up with a design that used fewer fastening points to
reduce the chances of potential breakages. The top “lid” contains the assembly points
for the pan-tilt servo unit as well as mounting holes that attach to the enclosure via
nuts and bolts at each of its four corners. The base is enclosed with the connector and
its accompanying electronics, producing a mostly enclosed unit that protects its
internal circuitry, with the option to add an internal cap to fully shield the exposed
parts. For mobile use cases, the internal components need to be well protected from
physical damage, hence the design of a roll cage to protect the camera and servos.
3.2.2.3. Expandability
A passive benefit of including some of the previous constraints was allowing the same
basic features of the module to be used on other unique module types. For example,
using the Pi allows more peripherals to be connected if necessary, making it in some
ways an expandable, general-purpose module. In addition, the mounting pegs on the
tilt bracket allow more sensors (such as IR sensors/emitters, microphones, ultrasonic
sensors etc.) to be placed alongside the camera, enabling the robot to capture a much
more wholesome perspective of its surroundings. These features add a large degree of
flexibility to the design that enables the user to define an appropriate use case and
modify the attachment accordingly.
3.2.2.4. Hardware Assembly Sequence
One of the most essential considerations was the order certain components would be
assembled in. This required a sound understanding of how to integrate the various
elements, such that the minimum number of assembly steps could be carried out to
assemble the module. It also dictated the placement of certain components with
respect to one another and guided the positioning of fastening components such as
nuts and screws. An animation of this exploded diagram is also presented in the
following address: <link here>.

30
3.2.3. Pan-Tilt Unit Design
While a fixed camera could be used on-board an MSR attachment, would greatly limit
the field of vision (FOV) of the robot attached to it. In order to expand this FOV, a 2-
degree-of-freedom (DOF) pan-tilt unit was designed for the add-on. Figure 8
illustrates the pan-tilt unit design as well as the camera mounting arm.
Figure 9: the pan/tilt mechanism for two use cases: front attachment (left), and side
attachment (right)
The attachment was envisioned for two primary use cases: to be used at the front of a
multi-robot serving as the primary attachment (on an active connector); or to be
connected to the side of a robot, on a robotic arm for example, through one of the
robot’s passive connectors as a secondary attachment (a claw/gripper would be the
primary attachment in this case). It was therefore required that the attachment had a
maximum field of view in any of these cases, hence the proposed pan-tilt
arrangement. Some early design prototypes are also presented in Appendix I. Those
were discarded due to inefficiency, and in favour of this “spherical” configuration.
3.2.4. Pan-Tilt Alignment
Figures (5) shows the angle range (approximately ±180°) of the pan-tilt mechanism.
This particular arrangement was created so the distance between the servo axes would
be brought as close together as possible. This adds the benefit of maintaining a
constant visual reference, by having the camera frames start from the same origin
point for all possible pan-tilt poses. This spherical joint configuration also allows for a
larger range of motion compared to those of other joint configurations.

31
Figure 10: pan/tilt motion arcs, showing a range of approximately ±180°
3.2.4.1. Pan-Tilt Mechanism Actuation
Most pan-tilt actuation mechanisms use standard servo motors. Servo motors are
small, geared motors usually limited to ±180° of rotation, although there are many
designs that allow for continuous rotation. The servos selected for the pan-tilt
mechanism were Hextronik HXT900 9 gram servos, a common size for use on small
robots such as the HiGen module.
3.3. The Single-Board Computer
Following the initial prototyping stage, further in-depth research revealed it would be
much simpler to acquire images or video from a single-board computer (SBC) device
featuring Wi-Fi communication. Several different SBC’s have been compared to
identify which would be suitable for use on-board the add-on. Of these SBC’S, the
Raspberry Pi was deemed the most viable option for the intended use case. Figure 5
shows the four SBC’s that have been compared. Appendix A presents a table
comparing these four devices.
Figure 11: four different single-board computers; Raspberry Pi 2 (left, back); ODroid C1
(right, back); HummingBoard (left, front); MIPS Creator Ci20 (right, front). Reproduced
from [30]

32
3.4. On-board Electronics
As part of the compatibility design requirements, an intermediate tool expander board
was to be designed. This takes the form of a custom Printed Circuit Board (PCB)
which connects to the Teensy microcontroller. This board is connected to the Tool
Controller which attaches to the connector.
This section outlines the motivation for the board, on-board communications design
considerations, and outlines the process of designing the tool expander from
schematic design to finalised prototype board.
3.4.1. The Raspberry Pi
The Raspberry Pi model A+ is a slightly smaller Raspberry Pi model, measuring
65×56×12 mm. With 256 MB of RAM, the computer not only towers over similar-
sized microcontroller devices such as the Arduino Uno, which only provided a
maximum of 32 MB of RAM, but also narrowly edges out competition from similar-
priced SBC’S. Figure 12 (left) shows the Raspberry Pi board.
One crucial aspect of the design of the add-on is future expandability. It was therefore
important to enable the electronics configuration of the add-on to be changeable
according to the intended use case. The Raspberry Pi computer was partly chosen for
this reason; its 40-pin General-Purpose Input Output (GPIO) header enabled a
multitude of devices to be connected to it, utilising various communication protocols
such as Universal Asynchronous Receiver-Transmitter (UART) serial, Inter-
Integrated Circuit (I2C), and Serial Peripheral Interface (SPI).
Apart from ease of implementation, there are other benefits associated with the use of
single-board computers for the on-board processing software development. Firstly, it
would facilitate the development and implementation of control algorithms robustly
using MATLAB and Simulink, as hardware support packages have been created to
interface with these platforms. Those could be used in three main use cases: running
standalone packages on the platform directly in Simulink; running hardware-in-the-
loop-type simulations with the ability to tune the simulation parameters from the
computer in real-time; and using MATLAB to run commands, scripts, or functions
directly on the device. These will be further illustrated in Chapter 4.

33
Another added benefit would be exploiting the potential of cloud computing. SBC’s
are designed to interface with the internet, so imbuing the module with direct access
to the Internet of Things (IoT) could have the potential to make the entire MSR
system more powerful and applicable in practice, for live-streaming data and remote
operation. This will be reviewed in more depth in Chapter 6.
3.4.2. The Raspberry Pi Camera
The Raspberry Pi Camera presented itself as the primary candidate for the on-board
camera implementation, as it was readily supported by the Pi in terms of hardware as
well as software interfacing. The powerful, 5 MegaPixel camera unit features an
OmniVision OV5647 camera sensor with a resolution of 2592 x 1944 pixels. The
chosen version of the camera, the Pi NoIR (no IR) has no IR filtering. This type of
camera is commonly used in low-light conditions alongside IR emitters, making it
suitable for poorly lit environments such as caves, inside collapsed buildings, or
inside pipes. Figure 12 shows the Pi NoIR camera.
3.4.3. The Teensy Microcontroller
The HiGen module uses a specialised microcontroller as its “brain”. This device, the
Teensy 3.2 Low Cost (LC) microcontroller, shown in figure 12 (centre), interfaces
with the CC which, in turn, routes the signals to/from the connector board circuit. The
reader is referred to section 2.5.2 for the functions of the CC and connector board).
The Teensy, featuring a 96 MHz Atmel AVR microprocessor and support for various
communication platforms (SPI, UART and I2C), and a small form factor (35.56 mm x
17.78 mm) render it ideal for embedded applications.
Figure 12: (left) Raspberry Pi NoIR Camera. Retrieved from [31]; (centre) Teensy 3.2 LC
(Low Cost). Retrieved from [32]; (right): Raspberry Pi Model A+. Retrieved from [33]

34
Since the Wi-Fi adapter occupied the board’s only USB port and the Pi’s micro-USB
port was reserved for power and the infeasibility of connecting more peripherals to
the Pi via a powered USB hub, the GPIO provided the alternative low-bandwidth
communication method required to interface with other electronics. It was therefore
important to implement the on-board electronics with this in mind, to help make the
board as expandable as possible.
3.4.4. Low-Level Communication Management
In order to allow more efficient high-level computation on board the Pi for tasks such
as real-time image processing and video streaming over Wi-Fi, it was important to
implement a solution that delegated low-level networking tasks to another device. For
this reason, an intermediate Printed Circuit Board (PCB) was designated as a
communication ‘middleman’ that regulated low-level peripheral control. In addition,
this microcontroller has in-built support for adding Controller Area Network (CAN)
bus communication. The CAN bus is used to enable the robots to exchange low-level
messages about each other’s status and orientation, giving the robots useful
knowledge of the other robots. From within the Pi, low-level control over peripheral
devices is well established, using a selection of open-source, third-party libraries such
as wiringPi [34] for accessing GPIO pins. These libraries, built in a similar fashion to
Arduino libraries, support standard communication protocols such as UART serial,
SPI, and I2C communication. A summary table of the various communication
protocols compatible with both devices is shown in table 3.
Initially, SPI, the most advantageous protocol, was chosen as the method of
communication between the Pi and the Teensy. However, practical implementation of
this protocol proved too challenging as neither device natively supported running in
SLAVE mode. Several attempts have been made to compile programs including a
third-party library that supported SPI SLAVE mode [teensy-master-slave], but the
programs refused to compile and flagged up numerous errors. Therefore, the use of
SPI was foregone.

35
Table 4: Comparing three serial data protocols; SPI, I2C, and UART
The alternative low-level communication channel between the Pi and the Teensy was
the UART, which used a transmit-receive (TX-RX) channel from each device
connected to its counterpart on the other device (RX-TX), in addition to a common
ground line. UART is popular for such applications as it offers a sufficiently low
latency solution for the intended use as well as flexibility over the message content.
The serial communication protocol allows the Raspberry Pi to send data to the Teensy
once this data is available, in intervals determined by the baud rate of the serial link.
In most cases, the user controls this baud rate while initialising the serial protocol;
however, the maximum baud rate is governed by the size of the on-board
microprocessor. The Teensy would then process this data and execute commands
based on the nature of the data acquired.
StrB DB01 DB02 DB03 DB04 DB0… DBn PB StpB StpB
Figure 13: an n+4-bit 'word' transmitted over UART serial, showing the start bit (StrB), data
bits (DB01-DBn), parity bit (PB), and stop bits (StpB).
Protocol Properties Pros/Cons
SPI 4-wire connection: Master-In-Slave-Out
(MISO), Master-Out-Slave-In (MOSI),
Chip-Enable (CE), and Signal Clock
(SCLK).
Synchronous protocol: transmits/receives
data every clock cycle
Highest data bandwidth (MHz range)
Less sensitive to noise
Less complex to
implement than I2C
Number of wires
increases with added
devices
I2C Synchronous, two-wire (SCL and SDA)
half-duplex serial bus
Multiple masters and slaves
Bandwidth: 100 kHz – 3.4 MHz
More complex than
SPI or serial
Level-triggered;
corruptible
UART Asynchronous, Two-wire communication:
Rx and Tx lines only.
Predetermined interface parameters: baud
rate, start/stop bits, and parity bit
Bandwidth: 0. 3kbps – 1 Mbps
Simple to implement
Wastes CPU clock
cycles
Overhead since LSB’s
reserved for start; MSB
for stop and parity

36
Figure 13 shows a breakdown of a UART serial word, with a standard message size of
n+4 bits, where each word is composed of n+4 = 12 bits (1 start bit, 8 data bits, 1
parity bit and 2 stop bits). Assuming a required sampling rate of r = 5 ms (i.e.
transmitting a new word once every 5 ms), the data transfer rate, or baud rate, would
be:
𝐵 = (𝑛 + 4) ×1
𝑟 = (12) ×
1
5×10−3 = 2400 𝑏𝑝𝑠.
Equation 1: the baud rate of the serial protocol for a word size of 12 and a 5 ms sample rate
For example, if the coordinates of a point were identified by the image processing
algorithm, the Pi could compute a set of servo motor angles to be transmitted to the
servos to centre the image. These servo angles, received over serial every 5 ms, would
then be transmitted to the signal lines of the servo motors connected to the Teensy.
While this pathway introduces some degree of latency between the Pi and the Teensy,
it means the process of actuation and control can be separated from computation.
Implementation of the actual image processing algorithm are presented in chapter 4.
While the use of the GPIO is straightforward, it is usually unfavourable to connect
devices directly to the Pi unless absolutely necessary. This is because the GPIO is
regulated for a maximum of a few amperes, rendering it susceptible to potentially
destructive current surges from other devices. It was therefore required to include
low-level power regulation either directly from the power source or from an
intermediary board, i.e. the tool expander board. The full power requirements of the
add-on are described in the following section (3.4.5).
3.4.5. Power Requirements
On an MSR platform, power is a scarce resource, particularly when the robot is
connected to multiple other robots. To assess the full power requirements of the add-
on module, a regulated bench power supply was used to power the module. The
power supply was set to output a 5-V, 2-A power signal, which was connected to the
Pi’s 5 V and ground lines. The power supply had a measurement feature that indicated
the total current dissipated throughout the hardware when fully connected. A table of
power tests is provided in Table 5.

37
Table 5: Tested Current Draws of Multiple Configurations using a 5 V 2 A regulated
power supply
Test Description of Test Components
Value
(mA)
Add-on Boot A test of the power consumption at boot with all
peripherals connected 150
Teensy powering
the motors
A test of the teensy connected to power and used to
control the pan/tilt servos
350
(avg)
All connected A test of all the electronic subcomponents fully
connected; the Pi, Teensy, servos, and camera 900
The servos operate at 4.8-6 V, drawing an average current of 150 mA each. Were
larger, more powerful servos to be used, their larger current draw would jeopardize
the Pi’s safe operation, potentially causing electrical damage. In addition, larger servo
motors would add unnecessary weight to the add-on, which must be kept as light as
possible to maintain the efficiency of the MSR.
3.5. Electronics Integration: The Tool Expander
Having identified the requirements for the PCB design, including its components and
desired functionality, the board schematic and PCB layout were designed. The boards
were designed using DesignSpark PCB, a free software package for electronics board
layouts. The designs inherited many of the predefined components for the board’s
predecessors, the processing boards on the MSR robots as well as the tool controller.
3.5.1. Schematic Design
The process of designing a PCB using DesignSpark involved two stages: the
schematic design, and the PCB layout. Each of these stages required initial
prototyping to fully identify the required components and their corresponding
connections. To achieve this, prototype connections were established between the Pi
and the Teensy using a breadboard. Initially, a setup of 4-line SPI was created, but
after numerous failed attempts to achieve results from this method, it was substituted
for three-line serial.
The schematic contains five main blocks. The Teensy board block lies at the centre of
the board, acting as the communications middleman. The Pi connection header block
provides the serial RX and TX channels in addition to a common ground, 5V power,
and 2 status pins to inform the Teensy of the Pi’s state during boot. The CAN

38
transceiver block connects the Teensy to the tool controller (the board on which this
PCB attaches) by means of a CAN bus, comprising CAN High and Low lines, 5V
power, ground, and I2C clock and data signals.
The CAN bus is managed by two microcontrollers; a TJA1055 fault-tolerant IC, and a
MPC4651 mixed signal digital potentiometer with I2C interface. A sensor block
connects the Teensy to four analogue inputs by means of headers into which sensors
could be plugged (via signal, power, and ground lines), and the servo block provides a
similar connection interface for two servos (connected to digital ports on the Teensy
as well as power and ground). Other components connected to the PCB are 3.3 kΩ
resistors, whose function is to regulate the 5 V line down to 3.3 V to use on-board the
CAN bus, which is only 3.3 V tolerant. In addition to those, header pins are
designated to connect to other boards.
3.5.2. PCB layout
The PCB layout follows the above schematic design, marking the connection ports for
signal, power, sensors, and actuators (servos). Designing the PCB involved
transferring the schematic design into the PCB layout environment. A board layout
was created as a DXF file in SolidWorks to ensure the board profile was precisely
traced. The layout is shown in Figure 15.
The form factor of the board is designed to fit directly above the CC. Therefore, the
positions of mounting holes and top-to-bottom headers were traced from the CC
board. The next stage involved placing the components on the board such that the
connections to other components within the system, i.e. the Pi, the Teensy, and the
various sensors and servos, were all accounted for in terms of physical clearance. The
servo headers were measured to be about 15mm long, so it was decided they would be
placed on the underside of the board. This was intentional as sufficient clearance
could not be left on the board topside. To connect the servo headers horizontally,
right-angled male-to-male header pins would be soldered to the underside.

39
Figure 14: schematic diagram for the Tool Expander PCB

40
Figure 15: the Tool Expander PCB design
After all components had been locked in place, individual tracks were manually
routed between the different components. Following that, the ground copper was
poured to ensure all the ground pins are connected. Once the preliminary PCB design
was completed, a host of error checking reports were conducted on the board. This
was done to ensure the components were all correctly connected, the copper pour
ground could be routed to all its nets, and the component nets were not too close to
one another. Following these checks and subsequent revision of the layout, a Gerber
file, a common industry standard for PCB manufacturing plots was then generated
within DesignSpark. The Gerber plots were then sent to the manufacturer as a .zip file
and a prototype version of the board was manufactured.

41
Figure 16: the Tool Expander PCB prototype board with surface-mounted components,
showing the Raspberry Pi interface header in the top right corner, and the right-angle sensor
header at the bottom.
3.5.3. Surface-Mounted Components
To finalise the PCB prototype, the remaining electronics components were soldered to
the PCB. Those included the CAN IC chip (TJA1055), the digital potentiometer chip
(MPC4651), the 3.3 V regulator resistors (valued at 3.3 kΩ each), and the header pins
for each point of connection to the connector controller. The Teensy was then fixed in
place with soldered headers. Figure 16 shows the tool expander PCB with the surface-
mounted components soldered on. Assistance was given by C. Parrott for the surface
mounting of the CAN transceiver, the potentiometer, the resistors, and the headers.
3.6. Hardware Integration and Assembly
Once the electronics have been fully designed and manufactured, the assembly stage
could commence. The first components to be assembled were those on the pan-tilt
assembly. Firstly, the pan servo was calibrated to ensure it could rotate to ±180°. It
was then mounted onto the top attachment using screws. Next, the tilt servo bracket,
fixed to the servo arm, was attached to the pan servo. The tilt motor mounting brace
was attached to the servo horn using the servo arm.
Following that, the tilt servo was attached to the bracket and screwed in place. Next, it
was calibrated to ensure it would give the desired rotation range. The servo arm and
camera tilt mount were combined, and the camera, whose ribbon cable was passed
through a slit at the top of the cap, was attached to the camera cap. The camera and
cap were then fixed to the arm via mounting pegs. An additional screw could be
added to fully secure camera to the camera bracket; however, it was not used.

42
Before the Raspberry Pi could be fixed in place, the connection wires from the servos
and the GPIO were passed down through to the base of the add-on. The Pi was then
fixed into the enclosure via screws. The camera connector was then attached to the Pi.
The Wi-Fi dongle was added next. To conclude the assembly, the Tool Expander was
connected to the Pi and the servo motors. A full list of the add-on components is
provided in table 3 below. Figure 13 shows the assembled add-on.
Figure 17: the fully-assembled vision add-on, with a dummy connector base template
Table 6: List of components used within the vision add-on
Component Name Description Qty Cost (£) (M/P)
Passive Connector The passive connector to which a
robot unit attaches
1 TBD (M)
HXT900 9 gr micro
servo + servo arms
The servo motor model used for the
pan-tilt actuation mechanism and
servo arms to attach parts to
2
4.59 (P)
Raspberry Pi Model
A+
The single-board computer acting as
the brain of the add-on module
1 25.00 (P)
Pi NoIR Camera A Raspberry Pi-compatible camera
module with no IR filtering
1 21.00 (P)
Wi-Fi USB Dongle A Wi-Fi adapter for the Raspberry Pi 1 8.50 (P)
8 GB micro SD
memory card
A memory card to store the Raspberry
Pi OS
1 6.50 (P)
Tool Expander
Board
The PCB designed for the add-on and
the Teensy microcontroller
1 65.00 (M)

43
Chapter 4 - Software Design
This chapter details the various software development activities undertaken within
this project, including low-level hardware code written to interface the Pi and the Tool
Expander, concept testing using MATLAB to verify connectivity capabilities, and
network-level code to communicate between different elements of the add-on: the
add-ons, the robots, the workstation, and the various communication buses. In
addition, some code is demonstrated for some basic task execution, such as simple
face and object detection. Throughout this chapter, line numbers shall be used as
follows to reference their files in Appendixes: e.g. (l. 1-10) marks lines 1 through 10.
4.1. Operating System
Having selected the Pi as the SBC, it was required to select a software environment to
use on-board the computer. Since the Raspberry Pi was capable of running various
operating systems, as presented in Chapter 3, there were several options to choose
from. However, during research it was discovered that MATLAB had released a
hardware support package for Raspberry Pi. Using MATLAB and Simulink greatly
simplified image acquisition, source code development, and implementation on
hardware. It also meant that entire control strategies could be developed and modified
more easily, and powerful tools within Simulink easily exploited to program the add-
on behaviour. This will be further addressed later in the chapter.
Not only was it more convenient to use MATLAB for these purposes, but it also
meant it would be unnecessary to configure large and computationally taxing image
processing code on the Pi, such as the Open Computer Vision library (OpenCV) [35].
According to this tutorial [36], the library would take an excess of 15 hours to install
on the B+ version of the Pi, rendering it much too unwieldy for the less capable A+.
The support package required a specific OS to be installed onto the SD card on-board
the Pi. The OS installed was Raspbian Wheezy, a variant of Linux Debian. The full
version of the OS was installed, although for most cases the add-on would be used in
headless mode, so the default boot option was set accordingly. Using this

44
configuration discarded the graphical user interface in favour of a more streamlined
terminal interface, a preferred programming environment for Linux-based operating
systems. This reduced CPU overhead that would be better utilised for real-time
computation on the Pi.
The software was installed as per the MATLAB installation guide. To use this support
package, however, it was required to connect the Pi to a workstation PC running
MATLAB, as the Pi could not run MATLAB on-board. Therefore, a Secure Shell
(SSH) connection was established between the Pi and the workstation using SSH
PuTTy, an SSH client application.
4.2. SSH (Secure Shell)
SSH enabled remote access into the Pi over a Wi-Fi network through providing direct
access to the Pi command line. This was done to simplify communication between the
Pi and the master workstation. Before this could be set up on the Pi, it was necessary
to correctly set up the network configuration files.
4.2.1. Configuring the Network Interface
Initially, the Pi was connected to the external USB hub to allow multiple peripherals,
such as a wireless keyboard-mouse and the wireless USB dongle, to be connected
simultaneously. This was required to access the terminal directly on-board the Pi,
since Wi-Fi is not enabled by default within Raspbian Wheezy. Next, the Pi was
connected to an HDMI monitor. At this stage, raspi-config was used to configure
specific settings on the Pi, such as enabling the camera board and SSH and serial
connectivity. The Pi was then restarted. Figure 18 shows the raspi-config interface.
Figure 18 showing the rasp-config interface.

45
The next stage involved configuring wireless connectivity using the terminal
command-line interface. This involved modifying two of the Pi’s default files; the
interfaces file (etc/network/interfaces), and (etc/wpa_supplicant/supplicant.conf), the
supplicant configuration file. The interfaces file managed the different network
configurations enabled on the device for different interfaces, i.e. Ethernet or Wireless,
whereas the supplicant configuration file recorded all the wireless network settings
such as the network name (SSID), the pre-shared key (PSK), authentication protocol,
and authentication algorithms.
Figure 19 shows the interfaces file on the Pi, modified to allow static IP address
allocation. This ensures the IP address of the Pi remains the same after every
reconnection operation. Other settings, such as the gateway ID (i.e. the router IP
address), subnet mask, and broadcast ID, would also be required here. Those were
retrieved using the terminal commands: route -n and ifconfig.
1
2
3
4
5
6
7
8
9
10
11
# /etc/network/interfaces
auto wlan0
iface lo inet loopback
iface eth0 inet dhcp
allow-hotplug wlan0
iface wlan0 inet static
address 192.168.27.167
netmask 255.255.240.0
gateway 192.168.28.1
wpa-conf /etc/wpa_supplicant/wpa_supplicant.conf
iface default inet dhcp
Figure 19: the interfaces file
To automatically connect the Pi to the Wi-Fi network interface specified, the
supplicant file was also modified to include the network settings as shown in figure
13. Within this file, multiple networks could be initialised so the Pi would have a
choice of network to connect to.

46
1
2
3
4
5
6
7
8
network=
ssid="guest"
psk="shefconfkey"
proto=RSN
key_mgmt=WPA-PSK
pairwise=CCMP
auth_alg=OPEN
Figure 20: the supplicant configuration file
4.3. Concept Testing and High-Level MATLAB Connectivity
This section outlines the code developed in MATLAB for interfacing the Pi and the
devices connected to it. This MATLAB code has mainly been used to test out certain
hardware features. In addition to connectivity code, a simple object detection script
was developed to execute on-board the module, to test its processing capabilities.
4.3.1. Pi MATLAB Initialisation
Figure 14 demonstrates the process of interfacing with the Pi through the MATLAB
command prompt. The function raspi initialises a Raspberry Pi board object given
three arguments: its IP address (ip), the username (usr), and password (pswd).
6. ip = '192.168.27.167'; 7. usr = 'pi'; 8. pswd = 'raspberry'
9. mypi = raspi(ip, usr, pswd)
mypi =
Raspi with Properties:
DeviceAddress: 'mo-pi'
Port: 192.168.27.167
BoardName: 'Raspberry Pi Model A+'
AvailableLEDs: 'led0'
AvailableDigitalPins: [4 7 8 9 10 11 14 15 17 18 22 23 24 25 27 30 31]
AvailableSPIChannels:
AvailableI2CBuses: 'i2c-0' 'i2c-1'
I2CBusSpeed: 100000
Figure 21 showing the basic initialisation function for a Raspberry Pi board

47
The object declaration returns a set of properties for the Pi: the device address, Pi
model, the available SPI channels, available I2C buses and their speed, and available
LED’s. These properties are shown in figure 16.
4.3.2. Camera Board Initialisation
A similar procedure has been used to initialise a camera board object. The function
cameraboard was called to set up a camera board, with the target board ID (mypi) and
the camera resolution as its main arguments. Figure 17 shows this command run and
its output. The output shows numerous parameters that could be used to control
various picture settings, such as brightness, exposure, auto-white balance (AWB),
effects, as well as options for video recording.
10. res = '640x480'; 11. mycam = cameraboard(mypi, 'Resolution', '1280x720')
mycam =
Cameraboard with Properties:
Name: Camera Board
Resolution: '640x480' (View available resolutions)
Quality: 10 (1 to 100)
Rotation: 0 (0, 90, 180 or 270)
HorizontalFlip: 0
VerticalFlip: 0
FrameRate: 30 (2 to 30)
Recording: 0
Picture Settings
Brightness: 50 (0 to 100)
Contrast: 0 (-100 to 100)
Saturation: 0 (-100 to 100)
Sharpness: 0 (-100 to 100)
Exposure and AWB
ExposureMode: 'auto' (View available exposure modes)
ExposureCompensation: 0 (-10 to 10)
AWBMode: 'auto' (View available AWB modes)
MeteringMode: 'average' (View available metering modes)
Effects
ImageEffect: 'none' (View available image effects)
VideoStabilization: 'off'
ROI: [0.00 0.00 1.00 1.00] (0.0 to 1.0 [top, left, width, height])
Figure 22 showing the cameraboard initialisation command using the board name
and resolution arguments (top) and the command line output (bottom)

48
Once the camera board has been initialised, some simple scripts were used to test its
performance in teleoperation mode. Figure 18 shows a simple code snippet used to
detect the position of a green object in space and mark its centre using a red marker.
Figure 23 shows the sample screen output when the program was run; the top view
(subplot 1) shows the true-colour image, and the bottom view (subplot 2) shows the
image after pixel thresholding was used to isolate the green colour. The script uses an
example function developed by MathWorks to demonstrate implementing image
processing algorithms on the Pi, modified to output the coordinates of the centre of
the object with respect to the current picture frame.
The function, trackball, is demonstrated in Appendix D. The original function
performs pixel thresholding on the acquired image to isolate the green pixels which
are extracted from the image as RGB colour channels using matrix assignment (l. 5-
7). A black-and-white version of the image is calculated by subtracting half of the red
and blue channels (l. 11) and then shifting the image by the threshold specified as a
function argument (l. 14). The algorithm then scans the green area, locates its
centroid, and marks it with a red dot (l. 17-26) after normalising the coordinates of the
object relative to the image centre. The function then returns the black-and-white and
colour image by re-adding the black-and-white pixels (l. 29-31).
Figure 23: true-colour JPEG frame showing the centre of the green object (top); intensity
thresholding of the image to isolate green colour from background (bottom)

49
1. for i = 1: 50 2. [img, bw, xm, ym] = trackball(snapshot(cam), 40); 3. figure(2); 4. subplot(211); 5. imagesc(img); 6. subplot(212); 7. imagesc(bw); 8. drawnow; 9. pause(0.150) 10. end
Figure 24: sample code that uses the trackball algorithm to track the position of the green
object
4.4. Tool Expander Programming (The Teensy)
This section outlines the development of low-level code to interface the Teensy with
the Pi and the other board peripherals. As discussed in the previous chapter, the tool
expander board provided a serial communication link between the Pi and the Teensy.
This was used for two-way data streaming between the two devices; the Pi would
upstream messages to the motors, whereas the Teensy would transmit any relevant
status information received from the CAN bus.
Using the serial device support for Raspberry Pi, a serial device (the Teensy
controller) could be initialised as follows (figure 20).
1. teensy = serialdev(mypi, 'dev/ttyAMAO', 115200)
teensy =
Serial Device with Properties:
DeviceAddress: 'mo-pi'
Port: 192.168.27.167
BoardName: 'Raspberry Pi Model A+'
AvailableLEDs: 'led0'
AvailableDigitalPins: [4 7 8 9 10 11 14 15 17 18 22 23 24 25 27 30 31]
AvailableSPIChannels:
AvailableI2CBuses: 'i2c-0' 'i2c-1'
I2CBusSpeed: 100000
Figure 25: serial device initialisation command; input arguments: host device name
(Raspberry Pi), serial port address, and baud rate

50
4.4.1. Serial Communication Using MiniCom
Serial communication is well supported within the Raspberry Pi knowledge base,
especially with the use of hardware interface libraries such as [34]. However, for the
purpose of this project the library was not used within standalone C++ programs. To
test serial communication, the Teensy was programmed to write out incrementing
values and the same values were read from the serial port on the Pi. A simple serial
communication tool, called MiniCom, was installed and used to read the serial output
from the Teensy, and the Serial Console of the Arduino IDE was used to read out the
data written to the Teensy serial port. To use MiniCom, the command was input to the
SSH command line, and a screenshot of the data exchange is shown in Figure 24 (top
and bottom respectively).
1. minicom -b -o 9600 -D /dev/ttyAMA0
Figure 26: MiniCom used to input values to the serial port via SSH (left) and the Arduino
serial monitor echoing the data read (right).
The command allows the user to specify the baud rate of the serial interface initialised
(9600 in this case). The port action (i.e. open) is specified by the -o tag, whereas the
device address is specified using the -D tag. The Teensy was connected to serial port
(/dev/ttyAMA0), corresponding to the serial port on the Raspberry Pi.
4.4.2. Pan-Tilt from Keyboard
Having verified the serial functionality with MiniCom, it was desired to test the PWM
functionality of the Teensy, to verify its ability to send pan-tilt motor commands to
the pan-tilt servos. One of the first examples used was a basic program which coded
the WASD pad (‘w’, ‘a’, ‘s’ and ‘d’ keyboard keys) to servo turning commands. An

51
example of how this implemented is shown in Figure 23, showing up and down
tilting.
37. // Up and down TILT 38. if(input == 's') 39. if((tilt + 5 ) < maxtilt && tilt_old != tilt) 40. 41. tilt_old = tilt; 42. tilt += 5; 43. 44. 45. // Pan UP 46. if(input == 'w') 47. if((tilt - 5 ) > mintilt && tilt_old != tilt) 48. tilt_old = tilt; 49. tilt -= 5; 50. 51.
Figure 27: sample code snippet showing vertical (up and down) tilt commands within the Pan
Tilt Serial script
This simple Arduino script (Appendix NO) reads the serial data written to it, then
executes a series of if-else statements to determine which motor to write to and in
which direction: the ‘w’ and ‘s’ keys were mapped to ‘up’ and ‘down’ (tilt)
commands (l. 37-51), whereas the ‘a’ and ‘d’ keys were assigned to ‘left’ and ‘right’
pan commands (l. 54-68). Each key press corresponds to 5 degrees of pan/tilt in the
direction specified.
Two other input options exist: the ‘p’ key executes an incremental pan command that
sweeps the maximum pan angle (l. 71-74), and a stop command executes when the ‘o’
key is pressed (l. 77-80). Once the command is executed, the program prints out the
values and re-enters the loop.
4.4.3. Actuating the Motors using MATLAB
To test the serial interface between the Teensy and MATLAB, the Instrument Control
Toolbox was used to establish a connection to the Teensy. Once the connection was
established, a write command was executed from the interface to write out two integer
values, corresponding to pan and tilt angles, to the device. To ensure the Teensy
correctly read the message written to it, a serial print command was used to echo the
values written. The results of this read-write exchange are pictured in Figure 28,
which shows the Instrument Control Interface, along with the values written to the
servos.

52
Figure 28: the Instrument Control Application Interface in MATLAB, showing the data
read/write operations sent to the Teensy via serial.
4.5. Functionality Integration
The add-on was created with the goal of increasing the sensing capability of the robot
platform. Therefore, some sort of guided decision-making or task execution must be
demonstrated, ideally occurring between both components of the system; the tool
expander, and the Raspberry Pi. This section illustrates once such example, where a
simple integration experiment was conducted.
The goal of this experiment was to test the effectiveness of serial communication
between the Raspberry Pi and Teensy from MATLAB. However, invoking the serial
read-write operation from the Raspberry Pi’s serial ports had no effect on the motors.
Therefore, it was decided to use the PC as a means of routing the communication
between the Teensy and the Pi. This was done by connecting the Teensy to the PC via
USB and disconnecting it from the Pi serial interface. The serial object setup outlined
in section 4.4.3. was used to write the motor commands to the Teensy.
After turning on the camera, the program scans the scene for a green object. If not
found, the program pans to the left and right until an object is found. If not, the
program proceeds to tilt up and down until an object is found. If not, the program
exits and returns a message to the user. If the object is located, the program proceeds
to track it.

53
The MATLAB program calculated the difference between the current x-and y-
position of the object centre and the previous value. A bounding box was
subsequently drawn around the image centroid (the red dot). If the new value lay
outside the bounding box, the program would command the motor to actuate in the
direction opposite to the difference, to re-focus within the box. For example, if the
difference between the current and previous points were greater than 20 pixels to the
left, a command would be sent to the motor to move to the left so the point was back
within the box. A sample screen output is shown in figure 29Error! Reference
source not found.. Appendix [G] details the sample code used for this experiment.
Figure 29: (left) object centre and bounding box surrounding object; (right) thresholded
version of the image

54
Chapter 5 - Experimentation and Results
Once the main software features of the system were designated, it was required to
ensure they could be integrated together. This chapter introduces a model developed
for tracking an object with the pan-tilt mechanism. A brief analysis of this model is
also introduced. Finally, this chapter introduces the foundations of designing the
integration and testing code. The primary chosen development environment for this
code was Simulink, where simple blocks were combined to produce a basic controller
for the add-on.
5.1. The Target Tracking Problem: Approach
Target tracking in Computer Vision (CV) takes many forms. The Visual Servo (VS)
problem, a specific subset of target tracking problems, could be modelled using three
main hardware configurations: Eye-in-hand VS occurs when the camera is attached to
a 6 DOF robotic manipulator; eye-to-hand VS is when a camera, or multiple cameras,
are used to observe the robot or manipulator; and pan-tilt VS, where the camera is
controlled using a pan-tilt servo configuration, i.e. 2 DOF. For the case of pan-tilt
tracking, insights derived from eye-in-hand and pan-tilt VS approaches were studied.
5.2. The Target Tracking Problem: Framework
Computer vision makes extensive use of geometric transformations to map real-world
coordinates to equivalent points within an image plane. These coordinates could then
be used to, for example, estimate the pose of the object, or the camera with respect to
the object, or even the distance away from the object [37]. Several camera
configurations have been used for the purpose of object, as well as motion, tracking,
namely using multiple cameras simultaneously or using a system of stereo cameras to
triangulate objects. It was desired to explore using such methods to model pan-tilt
tracking. Specifically, given a position of a point in the real-world, the objective was
to find pan and tilt angles that would re-centre the view on that target point. A model
proposed in [38] introduces a mathematical set of procedures, or “forward pipeline”,
to map a 3D real-world point onto a corresponding 2D image plane, as well as an
“inverse” pipeline to obtain the reverse transformation.

55
The model introduces a method of describing the position of a point T with
coordinates (xt, yt, zt) in real-world coordinates projected onto the plane of the image,
forming the point P (xp, yp, zp). The image plane is defined with a centre D (xp, yp, zp),
and the vector 𝑂𝐷 is the direction vector of the virtual camera view (where O is the
origin). The pan and tilt angles, 𝜑𝑑 and 𝜃𝑑, determine the direction of 𝑂𝐷 in world
coordinates. In most cases, the roll angle (the rotation about the y-axis) is ignored, as
the corresponding DOF could be replaced by a software algorithm that rotates the
corresponding image. The formulation of the model is represented in Figure 30Figure
30.
To re-centre the camera view on the target point P on the image plane, the view must
rotate by the pan and tilt angles that correspond to the distances between the point P
and the centre D. These rotations are executed by the pan-tilt motors.
Figure 30: the point T (left diagram) corresponds to an equivalent point on an image plane
EFGH (the top of a frustum). The equivalent real-world plane in which T lies maps out the
base of a frustum, E’F’G’H (right). The frustum EFGH-E’F’G’H defines the projection
volume. Reprinted from [38].
The angles 𝜃𝑑 and 𝜑𝑑 pertaining to the direction vector 𝑂𝐷 are simply calculated as
the ratio between the depth zd, and the vector norm (for the tilt angle), and the inverse
of the tangent of yd and xd.
A set of geometrical parameters could be used to describe the frustum and thus
required to define the pan-tilt model; the vertical field-of-view (FOV) α, the vector

56
𝑂𝐷 , its normal distance (n) from the optic centre O, the aspect ratio, r, of the image
(where r = |EF/FG|), the vector norm of OD (i.e. the distance between O and the top
of the frustum), and the distance between OD and the base of the frustum.
Applying the inverse pipeline of the model developed in [34] yields a model which
relates the point (xp’’,yp’’,zp’’) to the point (x,y,z), by the inverse of the view
transformation matrix Mview. The convert the new centre of the target feature (u, v), to
the corresponding pan and tilt angles through the following trigonometric identities:
𝜃𝑑 = arccos (𝑧𝑑
√𝑥𝑑2+𝑦𝑑
2+𝑧𝑑2) ; 𝜑𝑑 = arctan (
𝑦𝑑
𝑥𝑑)
Equation 2: the pan and tilt angles obtained from the inverse pipeline method described in
[34]
5.3. Target Tracking: Experiments
As mentioned in the previous chapter, one of the reasons for choosing MATLAB as
the primary development environment for the add-on was the presence of built-in
hardware support for the Raspberry Pi. Through the use of the Simulink support
package for the Pi, two different modes of operation could be used: external mode,
where the tuning parameters of the model could be modified in real-time; and
standalone mode, where the model could be complied into source code and embedded
directly onto the Pi.
Before attempting to control the plant developed using the geometric model, it was
desired to verify the model to ensure it would yield principally sound results. A
simple experiment was therefore designed, using the following MATLAB code to
locate the centroids of the object tracked and, following which, plot its changes over
time.
5.3.1. Experimental Outline
Appendix G shows a MATLAB script which applied the calculated pan and tilt
transformations on a set of x- and y- coordinates acquired through the Raspberry Pi
camera, using the pan-tilt model. The function iterated through 500 samples,
calculated the pan-tilt angles, then calculated the difference between the current and
past pan and tilt angles, dφ and dθ. The target object, a green business card, was placed

57
a fixed distance (400 mm) away from the Raspberry Pi camera. The script was then
run remotely. After 500 iterations, the following graphs were obtained respectively.
Figure 31: (top left) true-colour and thresholded image with tracked centre; (top right)
variation of x- and y- coordinates of tracked centre; (bottom left) variation of tilt and pan
angles; (bottom right) rate-of-change of pan-tilt angles
5.3.2. Results
The obtained graphs show a large discrepancy between the model and the real-life
acquired image coordinates. While there have been elements of noise in the image
capturing process due to variations in light intensity and the low accuracy of the
tracking algorithm, the effect of these changes on pan and tilt angles would not
warrant such an output waveform.
The nonlinear dynamics presented in the pan output response could be a direct
consequence of the nonlinear arctangent conversion between the pan and the
coordinates of the point (xp’’, yp’’, zp’’) (Equation 2). A re-derivation of the model
would provide improved insight to guide the process of designing an adequate
controller. This will be briefly discussed in the following chapter.

58
The effects of noise could be further mitigated by varying the threshold specified in
the colour detection algorithm. The impact of reducing the colour threshold had a
detectable effect on some initial trials of the image acquisition loop. However, several
other parameters need to be further investigated.
In addition to re-evaluating the model, a simple simulation scheme could be used to
provide inputs to the model. The initial test could be providing a set of test image
coordinates at, for example, (x, y) = (160, 120) and the effect of providing this input
studied in closer detail. A further experiment would be to input to the model a
constant signal corrupted by zero-mean Gaussian noise at a low frequency, to
simulate the “jittering” resulting from the image acquisition process. Once the
simulation results yield closed-loop stable behaviour, further methods based on
velocity or position control of the states could be implemented. A simple illustration
of this simulation scheme is shown in figure 31.
Figure 32: Simulink scheme used to simulate the behaviour of the pan-tilt model
At the centre of the Simulink block is the pan-tilt optic model outlined previously,
input as a MATLAB M-function, acting as the plant to be controlled. Constant inputs
of (160,120) are input as the u and v values, to which “noise signals”, simulated by a
random number generator, are added. This effectively simulates a constant image
frame in which the position of the centre of the object varies sample-to-sample. The
initial pan and tilt angles are set to zero to simulate starting from a fixed point which
the image processing block attempts to find. Unit delay blocks are added between the

59
random number signals and the model, and then again from the model to the feedback
pathway. These delays resemble real-time communication latency and serve to
prevent algebraic loops within the model, brought about from using a feedback loop
to provide new values of pan and tilt to the model.
The control scheme of choice could vary depending on the required performance
output. A basic methodology to develop such a control scheme, based on error
tracking, is outlined in the following section. Owing to time constraints, it was not
possible to implement and test a control strategy to verify the model.
5.4. Target Tracking: Controller Design
The tracking problem, in its simplest form, could be viewed as attempting to minimise
a time-varying error term,
𝑒(𝑡) = 𝑠[𝑚(𝑡), 𝑎] − 𝑠∗,
Equation 3: the visual servo (VS) problem as an error minimisation of the target
feature w.r.t. the current camera target. Reprinted from [39]
where e(t) denotes the error, s denotes the current observed feature in terms of its
pixel coordinates m(t) and additional knowledge extracted from the frame (denoted by
a), and s* denotes the desired target feature. The two general techniques that exist,
Image-Based (IBVS) and Position-Based (PBVS), differ mainly in how s is defined.
In IBVS, s is specified as a set of coordinates within the target frame, whereas in
PBVS, s corresponds to a set of 3D parameters estimated from image measurements
[39].
The interaction matrix for a given point is generated from a mapping between the
point in real world coordinates and the camera’s focal length. The parameters within
this matrix are obtained directly from the image or can be measured during the camera
calibration. The interaction matrix is defined as
𝐿𝒙 = (−1 𝑍⁄ 0 𝑥 𝑍⁄
0 −1 𝑍⁄ 𝑦 𝑍⁄𝑥𝑦 −(1 + 𝑥2) 𝑦
1 + 𝑦2 −𝑥𝑦 −𝑥) .
Equation 4: the interaction matrix of the point x. Reprinted from [39]

60
In this matrix, X, Y, and Z correspond to the real-world coordinates of a point x,
whereas x and y are projections of these points on the image plane.
The projections x and y are obtained using the following equations:
𝑥 =𝑋
𝑍= (𝑢 − 𝑐𝑢) 𝑓𝛼⁄ ; 𝑦 =
𝑌
𝑍= (𝑣 − 𝑐𝑣) 𝑓⁄ .
Equation 5: image coordinates x and y defined in terms of the pixel coordinates (u
and v), the focal length (f), the camera centre (cu and cv), and the pixel ratio α.
Reprinted from [39]
The velocity of the point (x, y) in terms of linear and angular components, is
therefore:
𝑥 = −𝑣𝑥/𝑍 + 𝑥𝑣𝑧/𝑍 + 𝑥𝑦𝜔𝑥 − (1 + 𝑥2)𝜔𝑦 + 𝑦𝜔𝑧 ;
𝑦 = −𝑣𝑦/𝑍 + 𝑦𝑣𝑧/𝑍 + (1 + 𝑦2)𝜔𝑥 − 𝑥𝑦𝜔𝑦 − 𝑥𝜔𝑧 .
Equation 6: the velocity of x in terms of the linear and angular components of the
target’s motion
The shorthand notation for equation 5 is = 𝑳𝒙𝑣𝑐, i.e. the same form as equation 2.
In PBVS and IBVS, the value of the depth of the target point must be known, either
through direct measurement or estimation [39]. In the estimation case, Chaumette and
several others propose Kalman filters to obtain estimates of the robot’s trajectory.
However, equivalent methods could be applied to estimate the position of the image
x- and y-coordinates. This would involve describing the states of the system as the x-
and y-coordinates of the point on the target feature (i.e. the object’s centroid), rather
than the coordinates of the moving robot.
5.5. Camera Calibration
To use either model for VS, camera calibration is essential to identify the intrinsic
camera parameters: the focal length, f, the principal point coordinates (cu, cv), the
camera skew α, and the pixel ratio of the camera [37]. MATLAB provides an in-built
tool to calibrate different camera configurations; it could be used with either a stereo
mode camera with two lenses pointing towards the same point with a fixed angle in

61
between, or a single camera capturing the same image from different angles. The
latter approach was used as only one camera was included within the add-on.
The camera calibration procedure involved capturing the same image frame pattern, a
64-square checkerboard, whose square sizes are calculated beforehand. The pattern
recognition algorithm marked the crossings between the black and white squares and
calculated the pixel coordinates of a subset of those points, returning the indices of the
rejected points and marking them with a different marker. The algorithm then
calculated the distance of the camera away from the pattern object and generated a
host of other parameters pertaining to the camera.
The camera calibration was conducted as follows: the checkerboard, with squares
measuring 36.14 mm × 36.14 mm, was laid on the table. The add-on was then lifted to
various positions above the checkerboard, and snapshots of these frames were
recorded using a MATLAB script. The sample script was used to generate the images,
which were then imported within the calibration app. The app selected a subset of the
images generated and used those for the calibration procedures.
cameraParams1 = cameraParameters with properties: Camera Intrinsics IntrinsicMatrix: [3x3 double] FocalLength: [799.0569 812.6253] PrincipalPoint: [223.1936 234.0062] Skew: 0 Lens Distortion RadialDistortion: [0.0817 -0.3076] TangentialDistortion: [0 0] Camera Extrinsics RotationMatrices: [3x3x3 double] TranslationVectors: [3x3 double] Accuracy of Estimation MeanReprojectionError: 0.1986 ReprojectionErrors: [54x2x3 double] ReprojectedPoints: [54x2x3 double] Calibration Settings NumPatterns: 3 WorldPoints: [54x2 double] WorldUnits: 'mm' EstimateSkew: 0 NumRadialDistortionCoefficients: 2 EstimateTangentialDistortion: 0
Figure 33: the camera calibration parameters

62
Figure 34: The camera calibration session in MATLAB. The checkerboard is used to train the
calibrator (top), which generates a pattern-centric view that shows the position of the camera
in the different frames (bottom).
In addition to the intrinsic matrix of the camera, the calibration app calculates camera
distortion coefficients based on its inability to corroborate the target points. The app
also returns the X-Y-Z coordinates of the camera relative to the pattern. This could be
visualised with two modes: pattern-centred (visualising the pattern as a stationary
object and the various camera frames used to capture it), and camera-centred
(visualising the camera as stationary with the object placed at various points).
Identifying the intrinsic parameters of the camera is an essential step towards
developing an accurate VS model. Chapter 6 presents some insights on how this could
be realised on-board the add-on, to improve the equipped MSR reactiveness to its
environment and to ultimately achieve exteroception, fulfilling the purpose of the
hardware add-on.

63
Chapter 6 - Conclusion
This project aimed to produce a prototype add-on for a self-reconfigurable modular
robot system. Research into Modular Self-Reconfigurable Robots was conducted.
This involved investigating existing implementations of MSR systems and identifying
their key traits. From there, MSR systems with add-ons were identified, specifically
those with vision-based extensions. Next, the HiGen module was introduced, and the
system architecture of the MSR illustrated. This was used as a framework to identify
hardware and software design requirements, which were then implemented and
combined into a prototype device. Software was then developed to integrate the add-
on components, which could then be integrated with the HiGen connector. Finally, the
add-on’s potential as a means of collecting and processing data was explored.
6.1. Further Work
The final step to ensure compatibility with the MSR would be to fully integrate the
HiGen connector into the add-on in terms of hardware and software. This would
involve programming and testing CAN bus communication between the add-on and
the tool controller, so information could be exchanged throughout the MSR system.
As much of the infrastructure has been developed, the task of integrating these
communication methods would be relatively simple. It is worth noting that since the
HiGen connector was not supplied during the project, progress on this development
stage could not commence.
The initial project proposal involved exploring the potential to develop a secondary
add-on based on a gripper tool which has been partially developed by C. Parrott. This,
although not fully implemented, was considered throughout the design stages. For
example, the Tool Expander board incorporated attachment points for various sensors
and actuators that could be used to further enhance the gripper. Load sensors and IR
sensors have been purchased, but the time budget for the project was too limited to
attempt and implement these enhancements.

64
Through designing the vision add-on using the techniques outlined, this research
proposes the first implementation of an MSR extension that utilises a Single-Board
Computer as its on-board controller. This adds many beneficial qualities to the add-on
which no other MSR add-on design has yet explored, to the extent of the research
conducted. The use of the SBC’s computational power not only allows much more
complex decision-making, but also more robust real-time data acquisition and more
powerful system-wide communication.
In addition, since MATLAB was chosen as the primary software development
environment for the add-on, a variety of powerful software packages could be readily
integrated and used on the add-on. This could be used to develop system-level control
strategies that govern the behaviour of the MSR as a whole. While this was not
demonstrated in practice, research was conducted into autonomous control design for
SBC-based robots implemented within Simulink [41]. It was attempted to implement
similar methods on-board the add-on; however, they could not be fully verified during
this project.
Both MATLAB and Simulink have immense potential to further benefit this add-on.
For instance, functionality to live-stream data to the Internet of Things (IoT), through
a package named ThingSpeak [42], was briefly investigated. In addition, the prospect
of controlling the entire add-on behaviour using these tools render them interesting
progression points for the overall project. This serves to remove many of the software
development constraints, as the user would be in full control of the controller model
developed, be it at the individual add-on scale, or its complete integration within the
system.
It is hoped that this research paves the way for potential expansions upon both the
HiGen and its add-ons, and this SBC-based add-on. Much of the ground has already
been covered in this development: it is up to the successor to steer this add-on, and
consequently the MSR as a whole, in the direction of real-world application.

65

i
Appendix A: Project Task Sheet
Task Sheet - Legend
Blue – Completed
Orange - Partially Completed
Red – Abandoned/aborted due
to external factors
Strikethrough: Task no longer active

ii
Appendix B: Project Gantt Chart
Gantt Chart - Legend

iii
Appendix C: Project Resources Collected
Name ID Description
URL QTY
UNIT PRICE (£)
NET (£)
Teensy
TEENSYV32
Teensy 3.2
http://www.hobbytronics.co.uk/teensy-v32 1 16.25
16.25
Jumper Wire Kit
312 140 piece Jumper Wire Kit
http://www.hobbytronics.co.uk/jumper-kit-140 1 3.20
3.20
Male Header
36HEAD
36 Way Single Row Header 0.1 inch pitch
http://www.hobbytronics.co.uk/36way-header-254 1 0.17
0.17
Pi Breakout
2029 Pi Cobbler plus Breakout Cable for Raspberry Pi B+
http://www.hobbytronics.co.uk/raspberry-pi/rpi-connectors-cables/pi-cobbler-b-plus
1 16.23
16.23
M/F Jumpers
PRT-12794
Jumper Wires - Male/Female 6" (20 pack)
http://www.hobbytronics.co.uk/jumper-wires-mf-6in 1 1.2 1.20
Raspberry Pi A+
2447906
RASPBRRY-MODA+-256M SBC, RASPBERRY PI, MODEL A+, 256MB
http://uk.farnell.com/raspberry-pi/raspbrry-moda-256m/sbc-raspberry-pi-model-a-256mb/dp/2447906
1 16.23
16.23
Raspberry Pi NoIR Camera
2357308
RPI NOIR CAMERA BOARD RASPBERRY PI NOIR CAMERA BOARD
http://uk.farnell.com/raspberry-pi/rpi-noir-camera-board/raspberry-pi-noir-camera-board/dp/2357308
1 18.52
18.52
Raspbian Micro SD
1525 Pre-Loaded Raspbian microSD
https://www.coolcomponents.co.uk/pre-loaded-raspbian-microsd-card-for-raspberry-pi-b.html
1 9.99
9.99

iv
Card Card for Raspberry Pi B+
Mini WiFi Dongle
1129 Miniature WiFi (802.11b/g/n) Dongle
https://www.coolcomponents.co.uk/miniature-wifi-802-11b-g-n-dongle.html
1 8.54
8.54
Hextronik HXT 900
HXT 900
Hextronik HXT 900 9 GR SERVOS
http://www.hobbyking.com/hobbyking/store/__662__HXT900_Micro_Servo_1_6kg_0_12sec_9g.html
2 4.38
8.76
PCB Tool Exp Ver 1
Tool Expander PCB
pcbtrain.co.uk 2 44.14
88.28
Breadboard
720 Breadboard Deluxe
https://www.coolcomponents.co.uk/breadboard-deluxe.html
1 4.5 4.50

v
Appendix D:
/* Reading a serial ASCII-encoded string. and sending motor commands to the teensy. Adapted from Open Source code This example code is in the public domain. */ #include <Servo.h> #define HWSERIAL Serial1 int p0 = 90; Servo panServo; Servo tiltServo; void setup() // initialize serial: HWSERIAL.begin(9600); // make the pins outputs: panServo.attach(6); tiltServo.attach(5); panServo.write(p0); tiltServo.write(p0); // pinMode(bluePin, OUTPUT); void loop() // if there's any serial available, read it: if (HWSERIAL.available() > 0) // look for the next valid integer in the incoming serial stream: int pan = HWSERIAL.parseInt(); // do it again: int tilt = HWSERIAL.parseInt(); // look for the newline. That's the end of your // sentence: if (HWSERIAL.read() == '\n') // constrain the values to 50 <= (theta,phi) <= 150 pan = constrain(pan, 10, 170); tilt = constrain(tilt, 10, 170); // write the commands out to serial // print the two numbers HWSERIAL.print(pan, DEC); HWSERIAL.println(tilt, DEC); panServo.write(pan); tiltServo.write(tilt); else panServo.detach(); tiltServo.detach();

vi
Appendix E: Source Code for Trackball
function [img, bw, xm, ym] = trackball_cpy(img, thresh) r = img(:,:,1); g = img(:,:,2); b = img(:,:,3); %% Calculate green justGreen = g - r/2 - b/2; %% Threshold the image bw = justGreen > thresh; %% Find center [x, y] = find(bw); if ~isempty(x) && ~isempty(y) xm = round(mean(x)); ym = round(mean(y)); %% Creat a red dot xx = max(1, xm-5):min(xm+5, size(bw, 1)); yy = max(1, ym-5):min(ym+5, size(bw, 2)); bwbw = zeros(size(bw), 'uint8'); bwbw(xx, yy) = 255; %% Create output image img(:,:,1) = uint8(r + bwbw); img(:,:,2) = uint8(g - bwbw); img(:,:,3) = uint8(b - bwbw); xm = xm+0; ym = ym+0; else xm = 0; ym = 0; end

vii
Appendix F: Source Code for Teensy Serial WASD Pad
1. // CODE ADAPTED FROM OPEN SOURCE LIBRARIES 2. // AUTHOR DOES NOT CLAIM OWNERSHIP OF CODE DEVELOPED 3. // 4. #include <Servo.h> 5. 6. #define HWSERIAL Serial1 7. Servo panservo; 8. Servo tiltservo; 9. 10. const int maxpan = 150; 11. const int minpan = 10; 12. const int maxtilt = 150; 13. const int mintilt = 10; 14. int pan_old = 0; 15. int tilt_old = 0; 16. int pan = 0; 17. int tilt = 0; 18. int led = 13; 19. int flag = 0; 20. 21. void setup() 22. 23. panservo.attach(6); 24. tiltservo.attach(5); 25. panservo.write(pan); 26. tiltservo.write(tilt); 27. 28. Serial.begin(115200); 29. // HWSERIAL.begin(115200); 30. // HWSERIAL.println("ready"); 31. 32. pinMode(led,OUTPUT); 33. digitalWrite(led,HIGH); 34. 35. 36. 37. void loop() 38. if(Serial.available() > 0) 39. int input = Serial.read(); 40. 41. if(input == 'a') 42. if((pan + 10) < maxpan && pan_old != pan) 43. pan_old = pan; 44. pan += 10; 45. 46. 47. 48. 49. if(input == 'd') 50. if((pan - 10) > minpan && pan_old != pan) 51. 52. pan_old = pan; 53. pan -= 10; 54. 55. 56. 57. if(input == 's') 58. if((tilt + 10 ) < maxtilt && tilt_old != tilt) 59. 60. tilt_old = tilt; 61. tilt += 10;

viii
62. 63. 64. 65. 66. if(input == 'w') 67. if((tilt - 10 ) > mintilt && tilt_old != tilt) 68. tilt_old = tilt; 69. tilt -= 10; 70. 71. 72. 73. if(input == 'p') 74. for(int i = minpan ; i < maxpan ; i++) 75. panservo.write(i); 76. 77. 78. 79. if(input == 'o') // turn off motors 80. panservo.detach(); 81. tiltservo.detach(); 82. // flag = 0; 83. 84. panservo.write(pan); 85. tiltservo.write(tilt); 86. Serial.println("pan: " + (String)pan + " tilt: " + (String)tilt); 87. 88.
89.

ix
Appendix G: MATLAB Serial with Teensy
#include <Servo.h>
#define HWSERIAL Serial1
Servo panservo;
Servo tiltservo;
const int maxpan = 150;
const int minpan = 10;
const int maxtilt = 150;
const int mintilt = 10;
int pan_old = 0;
int tilt_old = 0;
int pan = 0;
int tilt = 0;
int led = 13;
int flag = 0;
void setup()
panservo.attach(6);
tiltservo.attach(5);
panservo.write(pan);
tiltservo.write(tilt);
Serial.begin(115200);
// HWSERIAL.begin(115200);
// HWSERIAL.println("ready");
pinMode(led,OUTPUT);
digitalWrite(led,HIGH);
void loop()
if(Serial.available() > 0)
int input = Serial.read();
if(input == 'a')
if((pan + 10) < maxpan && pan_old != pan)
pan_old = pan;
pan += 10;
if(input == 'd')
if((pan - 10) > minpan && pan_old != pan)
pan_old = pan;
pan -= 10;
if(input == 's')
if((tilt + 10 ) < maxtilt && tilt_old != tilt)
tilt_old = tilt;
tilt += 10;
if(input == 'w')
if((tilt - 10 ) > mintilt && tilt_old != tilt)

x
tilt_old = tilt;
tilt -= 10;
if(input == 'p')
for(int i = minpan ; i < maxpan ; i++)
panservo.write(i);
if(input == 'o') // turn off motors
panservo.detach();
tiltservo.detach();
// flag = 0;
panservo.write(pan);
tiltservo.write(tilt);
Serial.println("pan: " + (String)pan + " tilt: " + (String)tilt);

xi
Appendix H: Pan-Tilt Model in MATLAB
% MATLAB MODEL OF PAN-TILT TRACKING
% Adapted from work by Chen et al.
% Mohamed Marei, 29/04/2016
function [theta,phi,rho,XYZ] = pan_tilt(u,v,theta_d,phi_d) % Predefine n,r,alpha,w,h n = 0.40; % left as a small value for now; w = 320; h = 240; r = w/h; alpha=deg2rad(41.4); % Compute theta_d and phi_d, i.e. pan and tilt angles tdp = - pi + deg2rad(theta_d) ; pdp = pi/2 - deg2rad(phi_d); % compute the angles ctp = cos(tdp); % cos(theta-pi) stp = sin(tdp); % sin(theta-pi) cpp = cos(pdp); % cos(pi/2 - phi) spp = sin(pdp); % sin(pi/2 - phi) % Rotation matrix of theta about x-axis Rxt = [1 0 0; % Rotation of theta-pi about x-axis;
i.e. a tilt motion 0 ctp -stp; 0 stp ctp]; % Rotation matrix of phi about z-axis Rzp = [cpp -spp 0; % Rotation of pi/2-phi about z-axis; VT 1 spp cpp 0; 0 0 1]; % inverse of M_view Mview = Rxt*Rzp; Mview_inv= inv(Mview); % Compute image information xp_dd = 2*n*r*(-0.5+(u/w))*tan(0.5*alpha); yp_dd = 2*n*(-0.5+(v/h))*tan(0.5*alpha); zp_dd = -n; % Compute point x,y,z XYZ=Mview_inv*[xp_dd yp_dd zp_dd]'; X = XYZ(1); Y = XYZ(2); Z = XYZ(3); theta = round(rad2deg(acos(Z/sqrt(X^2+Y^2+Z^2)))); % theta_d is
defined as the (tilt angle) phi = round(rad2deg(atan(Y/X))); % phi_d is defined
as the pan angle end

xii
Appendix I: Source Code for Simple Tracking Controller
1 % %% Simple code to track a green tennis ball, find its centre, then issue
2 % % motor commands from the Pi to an Arduino.
3 % % Created by Mohamed Marei on 05/04/2016
4 % clear mypi cam teensy
5 ip = '192.168.27.167'; % Raspberry Pi's IP address
6 usr = 'pi'; % Pi username
7 pswd = 'raspberry'; % Password
8 %
9 mypi = raspi(ip,usr,pswd); % initialises Pi object
10 cam = cameraboard(mypi, 'Resolution','640x480');% initialises camera object
11 if cam.Rotation == 0 % Ensure camera faces right
12 cam.Rotation = 180; % way up
13 end
14 % A simple loop to track the position of the ball throughout the
15 % figure(1); clf reset
16 cam = cameraboard(mypi,'Resolution','320x240','Quality',40,'Brightness',60)
17 tb =0;
18 pb =0;
19 time = [1:500];
20 tlen = length(time);
21 tb_delta = zeros(1,tlen);
22 pb_delta = zeros(1,tlen);
23 theta_array = zeros(1,tlen);
24 phi_array = zeros(1,tlen);
25 xm_array = zeros(1,tlen);
26 ym_array = zeros(1,tlen);
27 XYZ_array = zeros(3,tlen);
28 %teensy = serialdev(mypi,'dev/ttyAMA0',115200);
29 teensy = serial ('Com6','BaudRate', 9600);
30 % substitute for teensy = serial('Com6') with the same board parameters
31 u = 160 + 1.*rand(1,500);
32 v = 160 + 1.*rand(1,500);
33 %%
34 for i=1:tlen
35 [img, bw, xm, ym] = trackball_cpy(snapshot(cam),40);
36 figure(1);
37 subplot(211);
38 imagesc(img);
39 rectangle(‘Position’.[xm-30 ym-27 60 54])
40 subplot(212);
41 imagesc(bw);
42 drawnow;
43 pause(0.05)
44 % theta is the pan angle, phi is the tilt angle
45 [theta,phi,XYZ]=pan_tilt(u(i),v(i),tb,pb);
46 theta_array(i)=theta;
47 phi_array(i)=phi;
48 xm_array(i) = xm;
49 ym_array(i) = ym;
50 tb_delta(i) = (abs(theta)-abs(tb));
51 pb_delta(i) = (abs(phi)-abs(pb));
52 tb=theta;
53 pb=phi;
54 XYZ_array(:,i)=XYZ;
55 % IF THE NEW COORDINATES are larger than 0.5* the width of the rectangle,
56 % pan; similarly for tilt
57 if phi*0.32 < 160-u(i) || theta*0.32 < 120-v(i)
58 write(teensy,[pan tilt],'uint8') % sends pan and tilt angles to teensy
59 end
60 end
61 figure(2); clf reset;
62 subplot(2,1,1);
63 plot(time,xm_array);
64 xlabel('time (ms)');
65 ylabel('x (pixels)')
66 subplot(2,1,2);
67 plot(time,ym_array);

xiii
68 xlabel('time (ms)');
69 ylabel('y (pixels)')
70 figure(3); clf reset;
71 subplot(2,1,1);
72 plot(time,theta_array);
73 xlabel('time (ms)');
74 ylabel('tilt (degrees)');
75 subplot(2,1,2);
76 plot(time,phi_array);
77 xlabel('time (ms)');
78 ylabel('pan (degrees)');
79 figure(4); clf reset;
80 subplot(2,1,1);
81 plot(time,tb_delta);
82 xlabel('time (ms)');
83 ylabel('d_\theta');
84 subplot(2,1,2);
85 plot(time,pb_delta);
86 xlabel('time (seconds)');
87 ylabel('d_\phi');

xiv
Appendix J: Design Sketches and SolidWorks Prototypes
(a) (b) (c)
Prototype of the enclosure
base. Scrapped due to
number of assembly points
required.
Prototype of the Pan
motor subassembly. Too
bulky to attach to a
bottom base.
Prototype of the pan motor
base. Scrapped but provided
base for subsequent designs.
(d) (e) (f)
Top bracket assembly
prototype. Scrapped due to
complexity.
Prototype V2 of the
assembly. Modified to
become octagonal,
thicker walls, and
detachable top “lid”
Prototype V1 of the
assembly, excluding tilt
motors or cameras.
Scrapped due to
infeasibility.

xv
References
[1] K. Stoy, D. Brandt and D. J. Christiensen, Self-Reconfiguring Robots: An
Introduction, Cambridge, Massachusetts: The MIT Press, 2010.
[2] C. Parrott, T. J. Dodd and a. R. Groß, “HiGen: A high-speed genderless
mechanical connection mechanism with single-sided disconnect for self-
reconfigurable modular robots,” in IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Chicago, IL, 2014.
[3] T. Fukuda and S. Nakagawa, “Dynamically reconfigurable robotic system,”
Proc. IEEE Conf. Robotics and Automation, vol. 3, pp. 1581-1586, 1988.
[4] M. W. Jorgensen, E. H. Ostergaard and H. H. Lund, “Modular ATRON: Modules
of a Self-Reconfiguring Robot,” in IEEE/RSJ Int. Conf. on Robots and Systems,
Sendai, Japan, 2004.
[5] S. Murata, H. Kurokawa and S. Kokaji, “Self-assembling machine,” in Proc.
IEEE Int Conf. on Robotics and Automation, San Diego, CA, 1994.
[6] G. S. Chirikjian, “Kinematics of a metamorphic robotic system,” in Proc. 1994
IEEE Conf. Robotics and Automation, San Diego, CA, 1994.
[7] B. Salemi, M. Moll and W.-M. Shen, “SuperBot: A deployable, multi-functional,
and modular self-reconfigurable robotic system,” in IEEE/RSJ Intl. Conf. on
Intelligent Robots and Systems, Beijing, China, 2006.
[8] K. Kotay and D. Rus, “Locomotion versatility through self-reconfiguration,”
Robotics and Autonomous Systems, vol. 26, pp. 217-232, 1999.
[9] M. D. Kutzer, M. S. Moses, C. Y. Brown, D. H. Scheidt, G. S. Chirikjian and M.
Armand, “Design of a New Independently Mobile Reconfigurable Modular

xvi
Robot,” in IEEE International Conference on Robotics and Automation,
Anchorage, Alaska, 2010.
[10] J. Davey, N. Kwok and M. Yim, “Emulating Self-reconfigurable Robots - Design
of the SMORES System,” in 2012 IEEE/RSJ Intl. Conf. on Intelligent Robots and
Systems, Vilamoura, Algrave, Portugal, 2012.
[11] S. Murata, E. Yoshida, A. Kamimura, H. Kurokawa, K. Tonita and S. Kokaji,
“M-TRAN: Self-reconfigurable modular robotic system,” IEEE/ASME
Transactions on Mechatronics, vol. 7, no. 4, pp. 432-441, 2002.
[12] M. Yim, K. Roufas, D. Duff, Y. Zhang, C. Eldershaw and S. Homans, “Modular
Reconfigurable Robots in Space Applications,” Autonomous Robots, vol. 14, no.
(2-3), pp. 225-237, 2003.
[13] M. Yim, D. G. Duff and K. D. Roufas, “PolyBot: a modular reconfigurable
robot.,” in Proceedings of the IEEE Intl. Conf. on Robotics and Automation, San
Francisco, USA, 2000.
[14] E. Yoshida, S. Matura, A. Kamimura, K. Tomita, H. Kurokawa and S. & Kokaji,
“A self-reconfigurable modular robot: Reconfiguration planning and
experiments,” The International Journal of Robotics Research, vol. 21, no. 10-
11, pp. 903-915, 2002.
[15] A. Shokri and E. Masehian, “A meta-module approach for cluster flow
locomotion of modular robots,” in Robotics and Mechatronics (ICROM), 2015
3rd RSI International Conference on, 2015.
[16] K. &. N. R. Stoy, “Self-reconfiguration using directed growth,” in In Proc. 7th
Int. Symp. on Distributed Autonomous Robotic Systems., 2004.
[17] Unknown, “MODLAB - the modular robotics laboratory at the university of
pennsylvania,” MODLAB, 2012. [Online]. [Accessed 11 November 2015].
[18] R. Gross, M. Bonani, F. Monanda and M. Dorgio, “Autonomous self-assembly in
swarm-bots,” IEEE Transactions on Robotics, vol. 22, no. 6, pp. 1115-1130,

xvii
2006.
[19] K. Payne, J. Everist, F. Hou and W.-M. Shen, “Single-Sensor Probabilistic
Localization on the SeReS Self-Reconfigurable Robot,” IAS, 2006.
[20] S. Babak, C. J. Taylor, M. Yim, J. Sastra and M. Park, “Using smart cameras to
localize self-assembling modular robots,” Distributed Smart Cameras, 2007.
ICDSC'07. First ACM/IEEE International Conference on, pp. 76-80, 2007.
[21] B. Shirmohammadi, C. J. Taylor, M. Yim, J. Sastra and M. Park, “Towards
robotic self-reassembly after explosion,” Departmental Papers (MEAM), p. 147,
2007.
[22] A. Castano, A. Behar and P. M. Will, “The Conro Modules for Reconfigurable
Robots,” IEEE/ASME TRANSACTIONS ON MECHATRONICS, vol. 7, no. 4, p.
403, 2002.
[23] B. Li, S. Ma, J. Liu, M. Wang, T. Liu and Y. Wang, “AMOEBA-I: A Shape-
Shifting Modular Robot for Urban Search and Rescue,” Advanced Robotics, vol.
23, pp. 1025-1056, 2009.
[24] D. L. Akin, B. Roberts, S. Roderick, W. Smith and J.-M. Henriette,
“MORPHbots: Lightweight Modular Self-Reconfigurable Robotics for Space
Assembly, Inspection, and Servicing,” in Space, San Jose, California, 2006.
[25] A. Lyder, R. F. M. Garcia and K. Stoy, “Genderless connection mechanism for
modular robots introducing torque transmission between modules,” in
Proceedings of the ICRA Workshop on Modular Robots, State of the Art, 2010.
[26] M. Yim, W. M. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson and G. S.
Chirikijian, “Modular self-reconfigurable robot systems [grand challenges of
robotics],” Robotics & Automation Magazine, IEEE, vol. 14, no. 1, pp. 43-52,
2007.
[27] I.-M. Chen, “Rapid response manufacturing through a rapidly reconfigurable
robotic workcell,” Robotics and Computer Integrated Manufacturing, vol. 17,

xviii
pp. 199-213, 2000.
[28] Y. Koren and M. Shpitalni, “Design of reconfigurable manufacturing systems,”
Journal of Manufacturing Systems, vol. 29, no. 4, pp. 130-141, 2010.
[29] C. Parrott, T. J. Dodd and R. Gross, “Towards A 3-DOF Mobile and
Reconfigurable Modular Robot,” 2014.
[30] G. Sims, “Showdown: Raspberry Pi 2 vs ODROID C1 vs HummingBoard vs
MIPS Creator CI20 (updated),” 30 04 2016. [Online]. Available:
http://www.androidauthority.com/raspberry-pi-2-vs-odroid-c1-vs-
hummingboard-vs-mips-creator-ci20-599418/.
[31] “Pi NoIR Camera,” The Raspberry Pi Foundation, 2014. [Online]. Available:
https://www.raspberrypi.org/products/pi-noir-camera/. [Accessed 24 November
2015].
[32] “Teensy USB Development Board,” PJRC, [Online]. Available:
https://www.pjrc.com/teensy/. [Accessed 12 December 2015].
[33] “Raspberry Pi Model A+ on Sale,” Raspberry Pi Foundation, November 2014.
[Online]. Available: https://www.raspberrypi.org/blog/raspberry-pi-model-a-
plus-on-sale/. [Accessed 11 November 2015].
[34] J. Drogon, “wiringPi,” wiringPi, none. [Online]. Available:
http://wiringpi.com/reference/serial-library/. [Accessed 26 January 2016].
[35] “OpenCV: an Open Source Computer Vision Library,” OpenCV, 2008. [Online].
Available: http://opencv.org/. [Accessed 11 February 2016].
[36] A. Rosebrock, “Install OpenCV and Python on your Raspberry Pi 2 and B+,”
PyImageSearch, [Online]. Available:
http://www.pyimagesearch.com/2015/02/23/install-opencv-and-python-on-your-
raspberry-pi-2-and-b/. [Accessed 11 February 2016].
[37] D. A. Forsyth and J. Ponce, Computer Vision: A Modern Approach, Essex:

xix
Pearson Education Limited, 2012.
[38] G. Chen, P. L. St-Charles, W. Bouachir, G. A. Bilodeau and R. & Bergevin,
“Reproducible Evaluation of Pan-Tilt-Zoom Tracking,” International Conference
on Image Processing (ICIP), pp. 2055-2059, 2015.
[39] F. Chaumette and S. Hutchinson, “24. Visual Servoing and Visual Tracking,” in
Springer Handbook of Robotics, Heidleberg, Germany, Springer-Verlag, 2008,
pp. 563-584.
[41] “Raspberry Pi Robot:,” MathWorks, 30 September 2014. [Online]. Available:
http://www.mathworks.com/matlabcentral/fileexchange/47376-control-a-
raspberry-pi-powered-robot-with-matlab-and-simulink. [Accessed 28 April
2016].
[42] “Internet of Things - ThingSpeak,” MathWorks, 2016. [Online]. Available:
https://thingspeak.com/. [Accessed 29 April 2016].