Embed Size (px)
Citation preview

Module: Robotics
Topic Area: Simple Machines
Benchmark/Lesson: SC.B.1.2-1/2; SC.B.1.2-4/5; SC.C.2.2.1– Electric Circuits
SC.B.1.2/1; SC.C.2.2/1; SC.C.2.2/3 – Electric Motor Schematics
SC.B.1.2.5 /SC.C.1.2/1; SC.C.2.2-1/3 – Robotics Schematics
________________________________________________________________________
Lesson 2: Motor SchematicsObjective
The purpose of this lesson is to encourage students to understand the term electric motor
and recognize the difference between an Alternate Current (AC) motors and Direct
Current (DC) motor. The student should be able to identify or recognize electric motor
parts. In addition, the students will be able to work with math concepts of Motor like:
angular velocity, power and torque. This will also give the student the basic knowledge of
electric motor design and components.
Lesson Background]
Electric motor is a machine which converts electric energy into mechanical energy.
It spins many parts of a household, sometimes this rotary motion is obvious, as in a fan or
mixer, but often it’s disguised, as in the agitator of a washing machine or the window
opener of an automobile. Motors come in a variety of shapes and sizes, each appropriate
to its task. A variety of electric motors, provide the power of robots to move material,
parts, tools, or specialized devices with various programmed motions. The word power is
define as the time rate of supplying or absorbing energy. The power associate with
current flow through an element is given by:
p = power in Watts or Joules per seconds (J/sec)
v = voltage in Volts
i = current in Amps
Robotics NSF/USF STARS M3L21

Some motors operate from direct current and can be used with batteries while others
require alternating current. There are even motors that work on either type of current they
may work with gas, or other type of fuel.
In this lesson, we’ll examine the basic mechanisms of electric motors. We’ll look at what
makes a motor turn and how motors differ from one another. Several of the questions that
will try to answer during this background are the following:
How magnetic forces can cause something to spin?
The rotor of an electric motor needs a torque to start it spinning. The rotor is a set of
thin metal plates stacked together, with thin copper wire coiled around each of the three
poles of the armature. This torque is normally produced by magnetic forces, exerted
between magnetic poles on the rotor and those on the motor’s stationary shell. Torque is
a force that produces or tends to produce a rotation or torsion <an electric car motor
delivers torque to the drive shaft>; also: the effectiveness of such a force consists of the
product of the force and the perpendicular distance from the line of action of the force to
the axis of rotation.
The equation for torque for an electric motor is given by:
T = torque of the motor (lbf*inch.) or (N*m)
r = radius of the motor shaft, pulley or whatever is attached to the motor
shaft [inches (inch.) or centimeters (cm)].
F = the force created by the motor (lbf. or N)
The motors supplied in robotics kits are designed for a specific torque and are listed as:
Large motors - 216 in-oz at 56 rpm (a little less than 1 revolution per second)
Small motors – 34 in –oz at 113 rpm (a little less than 2 revolutions per second)
These attractive or repulsive forces pull or push the outer components of a rotor,
producing torques that make the rotor spin faster and faster until friction or the objects
attached to it reduce its net torque to zero. After that point, the rotor turns at a steady
angular velocity.
Robotics NSF/USF STARS M3L22

Both the rotor and the motor’s fixed shell are magnetic. This angular velocity
corresponds to amount of revolutions per second or per minute. A revolution is
progressive motions of a body round an axis.
Why can not a motor be built exclusively from permanent magnets?
But while permanent magnets are often used in electric motors, at least some of a motor’s
magnets must be electromagnets. The electromagnet go his name because is magnetize
by the electrical current from the power source. That is the main reason that motor can
only keep turning if some of its magnetic poles change or move as the rotor spins. In that
way, while the rotor turns to bring opposite magnetic poles as close together as possible,
the poles keep changing or moving so that the rotor finds itself perpetually chasing the
optimum arrangement of poles.
What determines which way a motor rotate?
The coil in motor starts off with its magnetic poles arranged horizontally. Since opposite
poles attract, the coil experiences a torque that acts to spin the coil counterclockwise. The
coil undergoes angular acceleration and begins to rotate counterclockwise. The torque
continues until the coil’s poles reach the opposite poles of the stationary magnets. There
is then no torque on the rotor because the magnetic forces act directly toward or away
from the axis of rotation. The rotor is in a stable equilibrium. But just as the opposite
poles reach one another, the current in the coil reverses directions. Now the coil’s
magnetic poles are close to like poles of the stationary magnets and like poles repel one
another. The rotor is suddenly in the worst possible orientation and must turn upside
down to be optimally oriented again. Because it already has angular momentum, the coil
continues its counterclockwise rotation and once again experiences a counterclockwise
torque from the magnets. This process happens over and over like a cycle until the motor
is shutdown.
What does a motor turn mean?
Turns refers to the number of times wire is wrapped around the motor armature. The
fewer the turns in the motor armature, higher rotational speed can be achieve RPM or
top-end speed. For that reason if you want more speed choose a motor with fewer turns.
Keep in mind, though, that fewer turns requires greater battery draw, and therefore,
Robotics NSF/USF STARS M3L23

reduced battery run time. In addition, for big monster trucks, you'll need motors with a lot
of torque, not just speed. A lot of torque or power is needed to move the huge tires and
many gears of a huge truck. For monster trucks, motors in the 14 to 17-turn range provide
plenty amount of torque and are the best electric motor to use.
What does a motor wind mean?
A wind refers to the number of strands of wire wrapped around the motor armature. The
fewer number of winds the faster the acceleration higher top end speed you will have.
The number of winds, however, only affects motor performance to a very small degree.
For all practical purposes, you can simply ignore the number of winds on a motor and
focus upon the turns. Turns are really the important thing to worry about when you are
buying a motor.
Direct Current (DC) Electric Motors
They just work with batteries or direct current from a house or building plug. In most
DC electric motors, the rotor is an electromagnet that turns within a shell of stationary
permanent magnets. Now going back to the concept of direct current it is defined as the
electric current flow that travels just in only one direction. To make the electromagnet
stronger, the rotor’s coil contains an iron core that is magnetized when current flows
through the coil. The rotor will spin as long as this current reverses each time its
magnetic poles reach the opposite poles of the stationary magnets. The most common
way to produce these reversals is with a commutator. A simpler commutator has two
curved plates that are fixed to the rotor and connected to opposite ends of the wire coil.
The rotor of a DC motor turns at a speed that’s proportional to the voltage drop through
its coils. Those coils have little electric resistance and allow a large current to flow while
the rotor is at rest. But once the rotor is turning, the changing magnetic fields around the
spinning rotor cause it to experience electric fields. These electric fields oppose the flow
of current through the rotor, extracting energy from that current and lowering its voltage.
DC electric motors of this sort are used in a wide variety of battery operated devices,
from toy cars to electric screwdrivers. Unfortunately, their brushes experience
mechanical wear as their rotors turn and eventually wear out and must be replaced. The
Robotics NSF/USF STARS M3L24

brush allows the electric current to flow into the rotor once it touches one of these plates
and leaves the rotor through a second brush that touches the other plate.
Furthermore, the brushes produce mechanical interruptions in the flow of current and
these interruptions often create sparks. Motors with brushes are unsuitable for some
environments because their sparking can ignite flammable gases. Sparking also produces
radio waves so that an automobile’s DC motors often interfere with its radio reception.
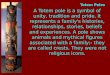
Figure 1 Direct Current Motor Components
Induction Alternating Current (AC) Motors
Some alternating current motors have rotors that are neither permanent magnets nor
conventional electromagnets. Alternating current means the electrical current is
alternating directions in a repetitive pattern. AC is created by generators in power plants,
and other sources. When an aluminum rotor is exposed to altering magnetic fields,
created by the electric currents that flow through it is called induction.
AC motors that use induction to create magnetism in their rotors are called induction
motors. They provide lots of torque, start easily, and are inexpensive They are the
simplest type of AC motors and commonly used in everything from household fans,
washing machines, refrigerator compressors, industrial pumps to cable-lift elevators, and
table saws. An induction motor works by moving a magnetic field around the rotor.
The stationary shell surrounding the rotor contains a sophisticated electromagnet called a
stator. While the stator does not move, the field it produces does. Through a clever use
of various electromagnetic devices, the stator is able to create magnetic poles that move
Robotics NSF/USF STARS M3L25
BRUSHES

in a circle and travel around and around the rotor. Since the pole’s motion is based on
current reversals of the AC power line, the North Pole usually travels once around the
rotor for every full cycle of the current. A South Pole also circles the rotor on the
opposite side. They induce magnetic poles in the rotor and the rotor experiences magnetic
torques. The rotor begins to spin, rotating faster and faster until it’s turning almost as
rapidly as the moving magnetic poles of the stator.
Math Skills
Measurement
Addition and multiplication
Data analysis
Science Skills
Forming a question
Hypothesizing
Communicating
Observing
Recognizing variables
Inferring
Predicting outcome
Interpreting data
Correlating data
Engaging Questions
1. What is an electrical motor?
2. What is purpose of using a brush in a Direct Current Motor?
3. List the basic components necessary to build a Direct Current Motor?
4. What does a stator do in an AC Motor?
5. What is the meaning of torque and how is produces in a motor?
6. What is the meaning of electrical induction?
7. What is the meaning of electromagnets?
Students Pre-Lab Activity (two pre-lab activities are suggested, teacher may choose
one or both)
Robotics NSF/USF STARS M3L26

1. The first activity consists in an Electric Motor Labeling according his use in a
motor. The teacher has to define all the basic components for both types of electric
motors (AC/DC) and each function before the student continue with the labeling activity.
2. The second activity consists of a search of all Electric Motors At Home. The
students should walk through their houses and counts all the motors they find. The
teacher has to explain and offer some examples before the students carry on this activity.
3. The third activity consist of
Robotics NSF/USF STARS M3L27
E
DC Electric Motor
Name: ________________________ Date: ___________________________ Pre Lab Activity #1 Electric Motor Labeling
Instructions: Match the different letters from each electric motor with the bottom table parts.
AC Electric Motor
K

DC Parts AC Parts
____ Commutator ____ Armature or Rotor
____ Cooper Winding ____ Stator
____ Axle ____ Laminate Core
____ Brushes ____Shell
____ Coil ____ Axle
____ Field Magnet ____Copper Winding
Kitchen Bathroom
1. _________________ 1. ____________________
2. _________________ 2. ____________________
3. _________________ 3. ____________________
4. _________________ 4. ____________________
5. _________________ 5. ____________________
6. _________________ 6. ____________________
Living room or Family room Garage
1. _________________ 1. ____________________
2. _________________ 2. ____________________
3. _________________ 3. ____________________
4. _________________ 4. ____________________
5. _________________ 5. ____________________
6. _________________ 6. ____________________
Bedroom Utility room
1. __________________ 1. ____________________
2. __________________ 2. ____________________
Robotics NSF/USF STARS M3L28
Name: ________________________ Date: ___________________________
Pre Lab Activity #2 Electric Motors At Home
Instructions: Walk through your house and make a list of all the things that you think use electric
motors.

3. __________________ 3. ____________________
4. __________________ 4. ____________________
5. __________________ 5. ____________________
6. __________________ 6. ____________________
This motor is based on a wonderful design by Bill Beaty, but this version uses only things
found around a typical house.
List of Materials
1. 2 empty soda cans.
2. 1 Styrofoam cup
3. A simple ball-point pen
4. 2 pieces of aluminum foil
5. 2 paper clips
6. A hot glue gun or regular glue
7. Cellophane tape.
8. 2 piece of wires
9. 2 alligator clips
10. Sharp blade
How to manage the experiment
1. The first step consists of spreading glue on the outside area of the
Styrofoam cup to set a thin layer of aluminum foil. Press the foil
against the cup to eliminate the wrinkles.
2. Then cut a half inch strip out of the foil on both sides, so you
have two patches of foil, one on each side of the cup.
3. The next photo shows the bottom of the pen, cut off with a sharp
knife. The cut end that is facing down has a little dimple that is
perfect to place the tip of the pen.
Robotics NSF/USF STARS M3L29
Name: ________________________ Date: ___________________________
Pre Lab Activity #3 Rotary Electric AC Motor
Instructions: Walk through your house collecting the items of the specified list. These materials are
important to build the rotary motor.

4. Then it is necessary to glue the cut end of the ball paint pen to the center of the
bottom of the cup as shown on the next picture. Because the cup is going to be
spinning on the tip of a pen.
5. The construction of the motor start with a paper plate, and
glue the bottom of a ball point pen to the center of the plate, maintaining the pen
straight up.
6. The next step consists of gluing two soda cans upside-down onto the plate, leaving
enough room between them. In that way the Styrofoam cup can rotate easily without
touching either can. ** Note there should be about half inch gap between the cup and
each can.
7. Straighten two of the bends paper clip into an S shape
and tape them to the cans as shown. Bend the wires,
leaving enough room to place the cup on top of the pen.
8. Now place the cup upside-down onto the pen tip. Make
sure the dimple fits onto the pen tip. The wires should
be about a half inch away from the cup. Nothing should
be touching the cup except the point of the pen.
9. Once everything is you can connect a wire from the can on the right to a large sheet
of aluminum foil pressed against the screen of a TV (or a computer with a CRT
screen).
10. The second end of the can left can be connected to a good ground connection, such as
a metal frame or you can just hold to this end, since your body is a good enough
ground for this little motor.
11. When you turn on the television, the foil will pick up a high voltage, and the little
motor will start spinning. As it slows down, turn the television off, and the motor will
Robotics NSF/USF STARS M3L210

get another kick, and spin faster. To keep the motor spinning it is necessary to turn off
and on the TV for a while.
How this motor spinning occurs?
First of all the can on the right hand side is charge with high voltage from the TV screen.
During this process a flux or push of electrons from the TV screen to the aluminum foil
occurs. This electrical “pressure” moves away from the wire, and hit the aluminum foil,
where the electrons leave the air molecules and collect on the foil. The electrons in the
can on the left are repelled by the electrons in the cup foil. With the right can repelling,
and the left can attracting, the foil is pulled to the left, and the cup rotates. This represents
the basic physical concept of an Alternate Current Induction Motor.
Teacher’s Procedure
1. The day prior to starting the activity has the students do the pre-lab engaging
questions and one of the pre-lab activities. {Consider: (1) Allowing the students take it
home for homework and include a section for parental involvement.
2. Checks to make sure students have done the pre-lab activity, allow students to keep
the pre-lab until they have completed the experiment and drawn conclusions.
3. Take 10-15 minutes to review each lecture on “Direct Current Electric Motor” and
“Alternate Current Electric Motor”.
4. Explain in detail the activity. As you explain the activity point out each piece of
material.
How to manage the experiment
1. Place the students in group of four or five.
2. Have all materials per table and have one person from each group gather the needed
material for his/her group.
3. Provide the data sheet attached to the experiment.
4. Check to make sure that all the materials include in the Direct Current Motor Kit are
available. Write on the board all the steps necessary to assemble the motor and
explain certain important details to avoid problems.
5. Observe that each group is following the written or the instructions manual. At the
same time walk around the room and provide assistance when it is needed with
Robotics NSF/USF STARS M3L211

connections and diagrams. Provide plenty time for the students to set up their model
(approximately 35 minutes).
6. Notify to the student when it is time to pick up and have each group return their
materials in an organized fashion to the back of the room.
7. Some children should need help to actually hook the wires to the battery, switch, and
other motor parts. Have your resource instructor help you but give them advance
warning that you will need their assistance this day.
Materials
1. Direct Current Electric Motor kit it includes:
2 coils of copper wire,
Base
Field pole or magnets,
Armature or core
Brushes
Fasteners, screws, pin, clips,
etc…
Instruction booklet with theory
and experiments included
3 to 6 v batteries
Multi-meter for voltage and
current
Student Procedure
Students group will begin the experiment verifying first if they have all the materials
including the instruction booklet to assemble the motor. They will follow the teacher
instruction all the time. Follow these steps when conducting the experiment:
1. Place students in groups of 4 or 5.
2. Set-up stations for each group with all necessary materials.
3. Layout all the materials in a counter and set them in order according to the
instruction booklet. The students should check the booklet and classify all the
materials require per step. In this way they will have the opportunity to get
familiar with the Direct Current Motor.
Robotics NSF/USF STARS M3L212

Fig.1 Shows all the parts of the Direct Current Motor Kit
4. Each group has to provide a list of materials at the end of the experiment.
5. After the assembling process it is necessary to set the batteries and prove if the
motor is working. This could be done by the teacher or someone with enough
experience with this type of equipment.
6. Once each group gets familiar with the motor proceed to answer the experimental
data sheet.
7. The experiment is going to be carrying for two different voltage sources and two
different numbers of turns so the student would have the opportunity to observe
the motor behavior.
8. A fifth test can be carry so the students will use the bigger battery or voltage
source and the maximum number of turns.
9. Record your observations and discuss your findings and answer the entire
experimental data sheet questionnaire.
Robotics NSF/USF STARS M3L213

Scientist Work Sheet
Name: ________________________ Date: _________________________
I. Experimental Data Sheet
DC Motor
Voltage Source(Volts)
Number of turns
Motor Current (Amp)
Motor Power(Watts)
Observations or Remarks
1st test
2nd test
3rd test
4th test
5th test
II. Questions
1. Show all the mathematical steps to determine the electric motor power?
Robotics NSF/USF STARS M3L214
Power FormulaP = V*I 1.
2. 3.
4. 5.

2. When the voltage source is change what happened with the speed of the motor axle? Explain your answer.________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
3. What really happened when the voltage of the source remains the same but the number of turns is decrease? Explain your answer.________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ 4. What is the physical meaning of power and how is produces in a motor? Explain your answer.________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
5. What happened with the current when the number of turn is change? Explain your answer ________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
6. What happened with the current (I) when the voltage (V) of the source is change? Explain your answer ________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Robotics NSF/USF STARS M3L215

7. If the speed of the Direct Current Motor increases, what happened with the torque of the motor it will increase or decrease? Explain your answer ________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Student Post Lab Activity
Drawing Conclusion/Discussion Questions
1. Check to make sure the students have completed the “Experimental Worksheet”.
2. Review and discuss what the groups discovered on their own about the motor
behavior after all the different changes. Re-examine any areas of confusion and
make sure that the students understand clearly the concepts.
3. Other suggestion for a post-lab activity includes a writing report describing the Direct Current Motor Experiment.
4. In order to assess students' understanding on an individual basis, have students
work independently on a homework assignment or in class. Doing the following
questions that are posed in the teacher package:
1. How difficult was to assemble and make the motor work? Explain your answer.
2. How this type of motors can help us in future circumstances?
3. What did you learn from this activity?
4. Why are both types of motors useful in our lives?
5. Describe the function of a circuit breaker in any type of motor.
6. Enumerate different part of both type of motors (AC/DC) according the pre-lab activities.
7.
Interdisciplinary Activities (activity involving these subjects)
Robotics NSF/USF STARS M3L216

1. Language Arts
The students will be requires to develop a report explaining the different steps they took
all over the experiment.
2. Math
a. Multiplication skills
b. Data analysis
c. Current and Volt Measurement
using a multi-meter.
3. Critical Thinking, Reading, etc.
a. Answer of multiple question base on observation, deduction and understanding.
b. Writing a report about the previous experimental lesson is suggested. Students
could consult the some books at the library and use the internet as a source.
References/Suggested Sources/Websites
1. http://www.electronics123.com/amazon/catalogue/c4-2.htm
2. Harcourt Science Unit E “Physical Science” 1st edition, Harcourt School Publishers,
Orlando, Boston, Chicago, San Diego
3. http://www.howstuffworks.com/motor.htm
4. http://my.execpc.com/~rhoadley/magdcmot.htm
5. http://www.simplemotor.com
6. http://www.deltasee.org/CTC/Activity%2011%20Build%20It%20Electric%Motor.pdf
7. http://www.engin.umich.edu/labs/csdl/ME350/motors/ac/induction/
8. http://www.orchardproject.org/electric_motor.htm
9. http://www.mnstate.edu/lindaas/educators/MoveMeBabyET.pdf
10. http://www.webping.net/electroDynamic/electrostatic_motor.html
Robotics NSF/USF STARS M3L217