-
. . . . . .
ROBOTICS: ADVANCED CONCEPTS & ANALYSISMODULE 6 - DYNAMICS OF
SERIAL AND PARALLEL ROBOTS
Ashitava Ghosal1
1Department of Mechanical Engineering&
Centre for Product Design and ManufactureIndian Institute of
ScienceBangalore 560 012, India
Email: [email protected]
NPTEL, 2010
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 1 / 74
-
. . . . . .
.. .1 CONTENTS
.. .2 LECTURE 1IntroductionLagrangian formulation
.. .3 LECTURE 2Examples of Equations of Motion
.. .4 LECTURE 3Inverse Dynamics & Simulation of Equations of
Motion
.. .5 LECTURE 4
Recursive Formulations of Dynamics of Manipulators
.. .6 MODULE 6 ADDITIONAL MATERIALMaple Tutorial, ADAMS
Tutorial, Problems, References andSuggested Reading
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 2 / 74
-
. . . . . .
OUTLINE.. .1 CONTENTS.. .2 LECTURE 1
IntroductionLagrangian formulation
.. .3 LECTURE 2Examples of Equations of Motion
.. .4 LECTURE 3Inverse Dynamics & Simulation of Equations of
Motion
.. .5 LECTURE 4
Recursive Formulations of Dynamics of Manipulators
.. .6 MODULE 6 ADDITIONAL MATERIALMaple Tutorial, ADAMS
Tutorial, Problems, References andSuggested Reading
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 3 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Position and velocity kinematics ! cause of motion not
considered.Dynamics ! motion of links of a robot due to external
forces and/ormoments.Main assumption: All links are rigid no
deformation.Motion of links described by ordinary differential
equations (ODEs) also called equations of motion.Several methods to
derive the equations of motion Newton-Euler,Lagrangian and Kanes
methods most well known.
Newton-Euler obtain linear and angular velocities and
accelerations ofeach link, free-body diagrams, and Newtons law and
Euler equations.Lagrangian formulation obtain kinetic and potential
energy of eachlink, obtain the scalar Lagrangian, and take partial
and ordinaryderivatives.Kanes formulation choose generalised
coordinates and speeds, obtaingeneralised active and inertia
forces, and equate the active and inertiaforces.
Each formulation has its advantages and disadvantages.ASHITAVA
GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL,
2010 4 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Position and velocity kinematics ! cause of motion not
considered.Dynamics ! motion of links of a robot due to external
forces and/ormoments.Main assumption: All links are rigid no
deformation.Motion of links described by ordinary differential
equations (ODEs) also called equations of motion.Several methods to
derive the equations of motion Newton-Euler,Lagrangian and Kanes
methods most well known.
Newton-Euler obtain linear and angular velocities and
accelerations ofeach link, free-body diagrams, and Newtons law and
Euler equations.Lagrangian formulation obtain kinetic and potential
energy of eachlink, obtain the scalar Lagrangian, and take partial
and ordinaryderivatives.Kanes formulation choose generalised
coordinates and speeds, obtaingeneralised active and inertia
forces, and equate the active and inertiaforces.
Each formulation has its advantages and disadvantages.ASHITAVA
GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL,
2010 4 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Position and velocity kinematics ! cause of motion not
considered.Dynamics ! motion of links of a robot due to external
forces and/ormoments.Main assumption: All links are rigid no
deformation.Motion of links described by ordinary differential
equations (ODEs) also called equations of motion.Several methods to
derive the equations of motion Newton-Euler,Lagrangian and Kanes
methods most well known.
Newton-Euler obtain linear and angular velocities and
accelerations ofeach link, free-body diagrams, and Newtons law and
Euler equations.Lagrangian formulation obtain kinetic and potential
energy of eachlink, obtain the scalar Lagrangian, and take partial
and ordinaryderivatives.Kanes formulation choose generalised
coordinates and speeds, obtaingeneralised active and inertia
forces, and equate the active and inertiaforces.
Each formulation has its advantages and disadvantages.ASHITAVA
GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL,
2010 4 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Position and velocity kinematics ! cause of motion not
considered.Dynamics ! motion of links of a robot due to external
forces and/ormoments.Main assumption: All links are rigid no
deformation.Motion of links described by ordinary differential
equations (ODEs) also called equations of motion.Several methods to
derive the equations of motion Newton-Euler,Lagrangian and Kanes
methods most well known.
Newton-Euler obtain linear and angular velocities and
accelerations ofeach link, free-body diagrams, and Newtons law and
Euler equations.Lagrangian formulation obtain kinetic and potential
energy of eachlink, obtain the scalar Lagrangian, and take partial
and ordinaryderivatives.Kanes formulation choose generalised
coordinates and speeds, obtaingeneralised active and inertia
forces, and equate the active and inertiaforces.
Each formulation has its advantages and disadvantages.ASHITAVA
GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL,
2010 4 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Position and velocity kinematics ! cause of motion not
considered.Dynamics ! motion of links of a robot due to external
forces and/ormoments.Main assumption: All links are rigid no
deformation.Motion of links described by ordinary differential
equations (ODEs) also called equations of motion.Several methods to
derive the equations of motion Newton-Euler,Lagrangian and Kanes
methods most well known.
Newton-Euler obtain linear and angular velocities and
accelerations ofeach link, free-body diagrams, and Newtons law and
Euler equations.Lagrangian formulation obtain kinetic and potential
energy of eachlink, obtain the scalar Lagrangian, and take partial
and ordinaryderivatives.Kanes formulation choose generalised
coordinates and speeds, obtaingeneralised active and inertia
forces, and equate the active and inertiaforces.
Each formulation has its advantages and disadvantages.ASHITAVA
GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL,
2010 4 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Position and velocity kinematics ! cause of motion not
considered.Dynamics ! motion of links of a robot due to external
forces and/ormoments.Main assumption: All links are rigid no
deformation.Motion of links described by ordinary differential
equations (ODEs) also called equations of motion.Several methods to
derive the equations of motion Newton-Euler,Lagrangian and Kanes
methods most well known.
Newton-Euler obtain linear and angular velocities and
accelerations ofeach link, free-body diagrams, and Newtons law and
Euler equations.Lagrangian formulation obtain kinetic and potential
energy of eachlink, obtain the scalar Lagrangian, and take partial
and ordinaryderivatives.Kanes formulation choose generalised
coordinates and speeds, obtaingeneralised active and inertia
forces, and equate the active and inertiaforces.
Each formulation has its advantages and disadvantages.ASHITAVA
GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL,
2010 4 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Two main problems in robot dynamics:Direct problem obtain motion
of links given the applied externalforces/moments.Inverse problem
obtain joint torques/forces required for a desiredmotion of
links.
Direct problem involves solution of ODEs ! Simulation.Inverse
dynamics ! for sizing of actuators and other components, andfor
advanced model based control schemes (see Module 7, Lecture
3).Computational efficiency of inverse and direct problem is of
interest.Aim is to develop efficient O(N) or O(logN) N is the
number oflinks (for parallel computing) algorithms for use in
protein folding andin computational biology (see Klepeis et al.
2002).Dynamics of parallel manipulators complicated by presence
ofclosed-loops ! typically give rise to differential-algebraic
equations(DAEs) ! more difficult to solve.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 5 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Two main problems in robot dynamics:Direct problem obtain motion
of links given the applied externalforces/moments.Inverse problem
obtain joint torques/forces required for a desiredmotion of
links.
Direct problem involves solution of ODEs ! Simulation.Inverse
dynamics ! for sizing of actuators and other components, andfor
advanced model based control schemes (see Module 7, Lecture
3).Computational efficiency of inverse and direct problem is of
interest.Aim is to develop efficient O(N) or O(logN) N is the
number oflinks (for parallel computing) algorithms for use in
protein folding andin computational biology (see Klepeis et al.
2002).Dynamics of parallel manipulators complicated by presence
ofclosed-loops ! typically give rise to differential-algebraic
equations(DAEs) ! more difficult to solve.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 5 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Two main problems in robot dynamics:Direct problem obtain motion
of links given the applied externalforces/moments.Inverse problem
obtain joint torques/forces required for a desiredmotion of
links.
Direct problem involves solution of ODEs ! Simulation.Inverse
dynamics ! for sizing of actuators and other components, andfor
advanced model based control schemes (see Module 7, Lecture
3).Computational efficiency of inverse and direct problem is of
interest.Aim is to develop efficient O(N) or O(logN) N is the
number oflinks (for parallel computing) algorithms for use in
protein folding andin computational biology (see Klepeis et al.
2002).Dynamics of parallel manipulators complicated by presence
ofclosed-loops ! typically give rise to differential-algebraic
equations(DAEs) ! more difficult to solve.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 5 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Two main problems in robot dynamics:Direct problem obtain motion
of links given the applied externalforces/moments.Inverse problem
obtain joint torques/forces required for a desiredmotion of
links.
Direct problem involves solution of ODEs ! Simulation.Inverse
dynamics ! for sizing of actuators and other components, andfor
advanced model based control schemes (see Module 7, Lecture
3).Computational efficiency of inverse and direct problem is of
interest.Aim is to develop efficient O(N) or O(logN) N is the
number oflinks (for parallel computing) algorithms for use in
protein folding andin computational biology (see Klepeis et al.
2002).Dynamics of parallel manipulators complicated by presence
ofclosed-loops ! typically give rise to differential-algebraic
equations(DAEs) ! more difficult to solve.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 5 / 74
-
. . . . . .
INTRODUCTIONOVERVIEW
Two main problems in robot dynamics:Direct problem obtain motion
of links given the applied externalforces/moments.Inverse problem
obtain joint torques/forces required for a desiredmotion of
links.
Direct problem involves solution of ODEs ! Simulation.Inverse
dynamics ! for sizing of actuators and other components, andfor
advanced model based control schemes (see Module 7, Lecture
3).Computational efficiency of inverse and direct problem is of
interest.Aim is to develop efficient O(N) or O(logN) N is the
number oflinks (for parallel computing) algorithms for use in
protein folding andin computational biology (see Klepeis et al.
2002).Dynamics of parallel manipulators complicated by presence
ofclosed-loops ! typically give rise to differential-algebraic
equations(DAEs) ! more difficult to solve.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 5 / 74
-
. . . . . .
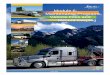
INTRODUCTIONMASS AND INERTIA OF A LINK
{0}
X0
Y0
Z0
d V
0p
Rigid Body
Figure 1: Mass and inertia of a rigid body
Mass m of the rigid body isgiven by
RV r dV , r is density.
Inertia of a rigid body !distribution of mass.Inertia tensor 0[I
] in f0g
0[I ] =
24 Ixx Ixy IxzIxy Iyy IyzIxz Iyz Izz
35
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 6 / 74
-
. . . . . .
INTRODUCTIONMASS AND INERTIA OF A LINK
Elements of the inertia tensorIxx =
RV (y
2+ z2) rdV ; Ixy =RV xy rdV ; Ixz =
RV xz rdV
Iyy =RV (x
2+ z2) rdV ; Iyz =RV yz rdV ; Izz =
RV (x
2+ y2) rdVThe inertia tensor is positive definite and symmetric
! Eigenvalues of0[I ] are real and positive.Three eigenvalues are
the principal moments of inertias and theassociated eigenvectors
are the principal axes.The inertia tensor in fAg, with OA
coincident O0, is given byA[I ] = A0 [R]
0[I ]A0 [R]T .
To obtain inertia tensor for a link i ,Coordinate system, fCig,
is chosen at the centre of mass of the link.fCig is parallel fig
(see Module 2, Lecture 2).Sub-divide complex link into simple
shapes and use parallel axistheorem.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 7 / 74
-
. . . . . .
INTRODUCTIONMASS AND INERTIA OF A LINK
Elements of the inertia tensorIxx =
RV (y
2+ z2) rdV ; Ixy =RV xy rdV ; Ixz =
RV xz rdV
Iyy =RV (x
2+ z2) rdV ; Iyz =RV yz rdV ; Izz =
RV (x
2+ y2) rdVThe inertia tensor is positive definite and symmetric
! Eigenvalues of0[I ] are real and positive.Three eigenvalues are
the principal moments of inertias and theassociated eigenvectors
are the principal axes.The inertia tensor in fAg, with OA
coincident O0, is given byA[I ] = A0 [R]
0[I ]A0 [R]T .
To obtain inertia tensor for a link i ,Coordinate system, fCig,
is chosen at the centre of mass of the link.fCig is parallel fig
(see Module 2, Lecture 2).Sub-divide complex link into simple
shapes and use parallel axistheorem.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 7 / 74
-
. . . . . .
INTRODUCTIONMASS AND INERTIA OF A LINK
Elements of the inertia tensorIxx =
RV (y
2+ z2) rdV ; Ixy =RV xy rdV ; Ixz =
RV xz rdV
Iyy =RV (x
2+ z2) rdV ; Iyz =RV yz rdV ; Izz =
RV (x
2+ y2) rdVThe inertia tensor is positive definite and symmetric
! Eigenvalues of0[I ] are real and positive.Three eigenvalues are
the principal moments of inertias and theassociated eigenvectors
are the principal axes.The inertia tensor in fAg, with OA
coincident O0, is given byA[I ] = A0 [R]
0[I ]A0 [R]T .
To obtain inertia tensor for a link i ,Coordinate system, fCig,
is chosen at the centre of mass of the link.fCig is parallel fig
(see Module 2, Lecture 2).Sub-divide complex link into simple
shapes and use parallel axistheorem.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 7 / 74
-
. . . . . .
INTRODUCTIONMASS AND INERTIA OF A LINK
Elements of the inertia tensorIxx =
RV (y
2+ z2) rdV ; Ixy =RV xy rdV ; Ixz =
RV xz rdV
Iyy =RV (x
2+ z2) rdV ; Iyz =RV yz rdV ; Izz =
RV (x
2+ y2) rdVThe inertia tensor is positive definite and symmetric
! Eigenvalues of0[I ] are real and positive.Three eigenvalues are
the principal moments of inertias and theassociated eigenvectors
are the principal axes.The inertia tensor in fAg, with OA
coincident O0, is given byA[I ] = A0 [R]
0[I ]A0 [R]T .
To obtain inertia tensor for a link i ,Coordinate system, fCig,
is chosen at the centre of mass of the link.fCig is parallel fig
(see Module 2, Lecture 2).Sub-divide complex link into simple
shapes and use parallel axistheorem.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 7 / 74
-
. . . . . .
INTRODUCTIONMASS AND INERTIA OF A LINK
Elements of the inertia tensorIxx =
RV (y
2+ z2) rdV ; Ixy =RV xy rdV ; Ixz =
RV xz rdV
Iyy =RV (x
2+ z2) rdV ; Iyz =RV yz rdV ; Izz =
RV (x
2+ y2) rdVThe inertia tensor is positive definite and symmetric
! Eigenvalues of0[I ] are real and positive.Three eigenvalues are
the principal moments of inertias and theassociated eigenvectors
are the principal axes.The inertia tensor in fAg, with OA
coincident O0, is given byA[I ] = A0 [R]
0[I ]A0 [R]T .
To obtain inertia tensor for a link i ,Coordinate system, fCig,
is chosen at the centre of mass of the link.fCig is parallel fig
(see Module 2, Lecture 2).Sub-divide complex link into simple
shapes and use parallel axistheorem.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 7 / 74
-
. . . . . .
OUTLINE.. .1 CONTENTS.. .2 LECTURE 1
IntroductionLagrangian formulation
.. .3 LECTURE 2Examples of Equations of Motion
.. .4 LECTURE 3Inverse Dynamics & Simulation of Equations of
Motion
.. .5 LECTURE 4
Recursive Formulations of Dynamics of Manipulators
.. .6 MODULE 6 ADDITIONAL MATERIALMaple Tutorial, ADAMS
Tutorial, Problems, References andSuggested Reading
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 8 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY
Energy base formulation involving kinetic and potential
energyThe kinetic energy of link i with mass mi and inertia 0[I
]i
KEi =12mi 0VCi 0VCi +
12
0w i 0 [I ]i 0w i
First and second term from linear velocity of the links centre
of massand angular velocity of link.0VCi and
0w i are the linear and angular velocities of the centre of
massand link fig, respectively.
0VCi =0i [R]
iVCi ;0w i = 0i [R]iw i
Using above equations
K :Ei =12mi iVCi i VCi +
12
iw i Ci [I ]i iw i (1)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 9 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY
Energy base formulation involving kinetic and potential
energyThe kinetic energy of link i with mass mi and inertia 0[I
]i
KEi =12mi 0VCi 0VCi +
12
0w i 0 [I ]i 0w i
First and second term from linear velocity of the links centre
of massand angular velocity of link.0VCi and
0w i are the linear and angular velocities of the centre of
massand link fig, respectively.
0VCi =0i [R]
iVCi ;0w i = 0i [R]iw i
Using above equations
K :Ei =12mi iVCi i VCi +
12
iw i Ci [I ]i iw i (1)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 9 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY
Energy base formulation involving kinetic and potential
energyThe kinetic energy of link i with mass mi and inertia 0[I
]i
KEi =12mi 0VCi 0VCi +
12
0w i 0 [I ]i 0w i
First and second term from linear velocity of the links centre
of massand angular velocity of link.0VCi and
0w i are the linear and angular velocities of the centre of
massand link fig, respectively.
0VCi =0i [R]
iVCi ;0w i = 0i [R]iw i
Using above equations
K :Ei =12mi iVCi i VCi +
12
iw i Ci [I ]i iw i (1)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 9 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY (CONTD.)
Velocity propagation formulas for serial manipulators (see
Module 5,Lecture 1)
iw i = ii1[R]i1w i1+ _qi (0 0 1)T joint i is rotaryiw i =
ii1[R]i1w i1 joint i is prismatic
iVCi =iVi +i w i i pCi
ipCi locates the centre of mass of link fig with respect to Oi
.i : 0! n to obtain kinetic energy of all links in a serial
manipulator.In parallel manipulators, several loops ! no
propagation formulas.Easier to compute angular and linear
velocities using derivatives1
0w i = _0i [R]0i [R]
T; 0VCi =
ddt
(0pCi ) (2)
0pCi is the position vector of the centre of mass of link i .1In
closed-loop mechanisms or parallel manipulators, one can
judiciously use the
propagation formulas for the serial portions.ASHITAVA GHOSAL
(IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL, 2010 10 /
74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY (CONTD.)
Velocity propagation formulas for serial manipulators (see
Module 5,Lecture 1)
iw i = ii1[R]i1w i1+ _qi (0 0 1)T joint i is rotaryiw i =
ii1[R]i1w i1 joint i is prismatic
iVCi =iVi +i w i i pCi
ipCi locates the centre of mass of link fig with respect to Oi
.i : 0! n to obtain kinetic energy of all links in a serial
manipulator.In parallel manipulators, several loops ! no
propagation formulas.Easier to compute angular and linear
velocities using derivatives1
0w i = _0i [R]0i [R]
T; 0VCi =
ddt
(0pCi ) (2)
0pCi is the position vector of the centre of mass of link i .1In
closed-loop mechanisms or parallel manipulators, one can
judiciously use the
propagation formulas for the serial portions.ASHITAVA GHOSAL
(IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL, 2010 10 /
74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY (CONTD.)
Velocity propagation formulas for serial manipulators (see
Module 5,Lecture 1)
iw i = ii1[R]i1w i1+ _qi (0 0 1)T joint i is rotaryiw i =
ii1[R]i1w i1 joint i is prismatic
iVCi =iVi +i w i i pCi
ipCi locates the centre of mass of link fig with respect to Oi
.i : 0! n to obtain kinetic energy of all links in a serial
manipulator.In parallel manipulators, several loops ! no
propagation formulas.Easier to compute angular and linear
velocities using derivatives1
0w i = _0i [R]0i [R]
T; 0VCi =
ddt
(0pCi ) (2)
0pCi is the position vector of the centre of mass of link i .1In
closed-loop mechanisms or parallel manipulators, one can
judiciously use the
propagation formulas for the serial portions.ASHITAVA GHOSAL
(IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL, 2010 10 /
74
-
. . . . . .
LAGRANGIAN FORMULATIONKINETIC ENERGY (CONTD.)
Velocity propagation formulas for serial manipulators (see
Module 5,Lecture 1)
iw i = ii1[R]i1w i1+ _qi (0 0 1)T joint i is rotaryiw i =
ii1[R]i1w i1 joint i is prismatic
iVCi =iVi +i w i i pCi
ipCi locates the centre of mass of link fig with respect to Oi
.i : 0! n to obtain kinetic energy of all links in a serial
manipulator.In parallel manipulators, several loops ! no
propagation formulas.Easier to compute angular and linear
velocities using derivatives1
0w i = _0i [R]0i [R]
T; 0VCi =
ddt
(0pCi ) (2)
0pCi is the position vector of the centre of mass of link i .1In
closed-loop mechanisms or parallel manipulators, one can
judiciously use the
propagation formulas for the serial portions.ASHITAVA GHOSAL
(IISC) ROBOTICS: ADVANCED CONCEPTS & ANALYSIS NPTEL, 2010 10 /
74
-
. . . . . .
LAGRANGIAN FORMULATIONPOTENTIAL ENERGY
Assumption: Potential energy due to gravity alone2.General
expression for potential energy due to gravity
PEi =mi 0g 0 pCi (3)0g gravity vector of magnitude 9:81m=sec20g
along vertical direction denoted by 0Z^ axis.0pCi location of the
centre of mass of link i from the zero orreference potential energy
surface.Constant value of the reference potential energy does not
matter asderivatives are taken.
2If springs or other energy storage devices are present,
appropriate modification tothe expression of the potential energy
of the link can be done. For example, if torsionalsprings are
present at joint i , add a term of the form 12kiqi
2 to the expression for thepotential energy.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 11 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPOTENTIAL ENERGY
Assumption: Potential energy due to gravity alone2.General
expression for potential energy due to gravity
PEi =mi 0g 0 pCi (3)0g gravity vector of magnitude 9:81m=sec20g
along vertical direction denoted by 0Z^ axis.0pCi location of the
centre of mass of link i from the zero orreference potential energy
surface.Constant value of the reference potential energy does not
matter asderivatives are taken.
2If springs or other energy storage devices are present,
appropriate modification tothe expression of the potential energy
of the link can be done. For example, if torsionalsprings are
present at joint i , add a term of the form 12kiqi
2 to the expression for thepotential energy.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 11 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONEQUATIONS OF MOTION
From the kinetic and potential energy, define the scalar
Lagrangian
L (q; _q) =N
i(KEi PEi ) (4)
N is the number of links excluding the fixed link.In serial
manipulators, with R or P joints dim(q) = n = NThe equations of
motion3, are
ddt
L _qi
Lqi
= Qi i = 1;2; :::;n (5)
Qi s are the externally applied generalised forces ! when only
jointtorques or forces are present
Qi = ti ; i = 1; :::;n (6)
3The Lagrangian formulation is equivalent to Newtons laws and
Eulers equationsfrom calculus of variation(see Goldstein 1980).
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 12 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONEQUATIONS OF MOTION
From the kinetic and potential energy, define the scalar
Lagrangian
L (q; _q) =N
i(KEi PEi ) (4)
N is the number of links excluding the fixed link.In serial
manipulators, with R or P joints dim(q) = n = NThe equations of
motion3, are
ddt
L _qi
Lqi
= Qi i = 1;2; :::;n (5)
Qi s are the externally applied generalised forces ! when only
jointtorques or forces are present
Qi = ti ; i = 1; :::;n (6)
3The Lagrangian formulation is equivalent to Newtons laws and
Eulers equationsfrom calculus of variation(see Goldstein 1980).
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 12 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONEQUATIONS OF MOTION
From the kinetic and potential energy, define the scalar
Lagrangian
L (q; _q) =N
i(KEi PEi ) (4)
N is the number of links excluding the fixed link.In serial
manipulators, with R or P joints dim(q) = n = NThe equations of
motion3, are
ddt
L _qi
Lqi
= Qi i = 1;2; :::;n (5)
Qi s are the externally applied generalised forces ! when only
jointtorques or forces are present
Qi = ti ; i = 1; :::;n (6)
3The Lagrangian formulation is equivalent to Newtons laws and
Eulers equationsfrom calculus of variation(see Goldstein 1980).
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 12 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONEQUATIONS OF MOTION
From the kinetic and potential energy, define the scalar
Lagrangian
L (q; _q) =N
i(KEi PEi ) (4)
N is the number of links excluding the fixed link.In serial
manipulators, with R or P joints dim(q) = n = NThe equations of
motion3, are
ddt
L _qi
Lqi
= Qi i = 1;2; :::;n (5)
Qi s are the externally applied generalised forces ! when only
jointtorques or forces are present
Qi = ti ; i = 1; :::;n (6)
3The Lagrangian formulation is equivalent to Newtons laws and
Eulers equationsfrom calculus of variation(see Goldstein 1980).
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 12 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONEQUATIONS OF MOTION
After performing the derivatives, equation of motion of a
serialmanipulator takes the form
[M(q)]q+[C(q; _q)] _q+G(q) = t (7)
[M(q)] nn mass matrix4,[C(q; _q)] nn matrix and [C(q; _q)] _q is
an n1 vector of centripetaland Coriolis terms contains only
quadratic _qi _qj terms,G(q) n1 vector of gravity terms, andt n1
vector of joint torques or forces.
All serial manipulator equations of motion can be written in the
aboveform!!
4For R joints, elements of [M(q)] have units of inertia kgm2.
For P joint, elementsof [M(q)] have units of mass Kg.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 13 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONEQUATIONS OF MOTION
After performing the derivatives, equation of motion of a
serialmanipulator takes the form
[M(q)]q+[C(q; _q)] _q+G(q) = t (7)
[M(q)] nn mass matrix4,[C(q; _q)] nn matrix and [C(q; _q)] _q is
an n1 vector of centripetaland Coriolis terms contains only
quadratic _qi _qj terms,G(q) n1 vector of gravity terms, andt n1
vector of joint torques or forces.
All serial manipulator equations of motion can be written in the
aboveform!!
4For R joints, elements of [M(q)] have units of inertia kgm2.
For P joint, elementsof [M(q)] have units of mass Kg.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 13 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPROPERTIES OF TERMS IN EQUATIONS OF
MOTION
Mass matrix, [M(q)], always positive definite and
symmetric.Total kinetic energy of a serial manipulator is
KE =12_qT [M(q)] _q (8)
KE 0 for j _qj 6= 0 and zero only when j _qj= 0 ! [M(q)] is
positivedefinite.Inertia cannot be imaginary along any component of
q ! Eigenvaluesof [M(q)] must be real ! [M(q)] must be
symmetric.
The centripetal and Coriolis terms can be obtained from the
massmatrix as
Cij =12
n
k=1
Mijqk
+Mikqj
Mkjqi
_qk (9)
The gravity terms can be obtained from the potential energy
as
Gi = (PE )qi
(10)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 14 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPROPERTIES OF TERMS IN EQUATIONS OF
MOTION
Mass matrix, [M(q)], always positive definite and
symmetric.Total kinetic energy of a serial manipulator is
KE =12_qT [M(q)] _q (8)
KE 0 for j _qj 6= 0 and zero only when j _qj= 0 ! [M(q)] is
positivedefinite.Inertia cannot be imaginary along any component of
q ! Eigenvaluesof [M(q)] must be real ! [M(q)] must be
symmetric.
The centripetal and Coriolis terms can be obtained from the
massmatrix as
Cij =12
n
k=1
Mijqk
+Mikqj
Mkjqi
_qk (9)
The gravity terms can be obtained from the potential energy
as
Gi = (PE )qi
(10)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 14 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPROPERTIES OF TERMS IN EQUATIONS OF
MOTION
Mass matrix, [M(q)], always positive definite and
symmetric.Total kinetic energy of a serial manipulator is
KE =12_qT [M(q)] _q (8)
KE 0 for j _qj 6= 0 and zero only when j _qj= 0 ! [M(q)] is
positivedefinite.Inertia cannot be imaginary along any component of
q ! Eigenvaluesof [M(q)] must be real ! [M(q)] must be
symmetric.
The centripetal and Coriolis terms can be obtained from the
massmatrix as
Cij =12
n
k=1
Mijqk
+Mikqj
Mkjqi
_qk (9)
The gravity terms can be obtained from the potential energy
as
Gi = (PE )qi
(10)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 14 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS
Presence of m loop-closure constraint equations (see Module
4,Lecture 1)
hi (q) = 0; i = 1;2; :::;m (11)
q 2n+m n actuated joint variables, q , and m passive
jointvariables f .To obtain equations of motion for a system with
constraints !Lagrange multipliers (Goldstein 1980, Haug
1989).Lagrangian written as
L (q; _q) =L (q; _q)m
j=1
ljhj(q) (12)
m lj s introduced (unknown) Lagrange multipliers.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 15 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS
Presence of m loop-closure constraint equations (see Module
4,Lecture 1)
hi (q) = 0; i = 1;2; :::;m (11)
q 2n+m n actuated joint variables, q , and m passive
jointvariables f .To obtain equations of motion for a system with
constraints !Lagrange multipliers (Goldstein 1980, Haug
1989).Lagrangian written as
L (q; _q) =L (q; _q)m
j=1
ljhj(q) (12)
m lj s introduced (unknown) Lagrange multipliers.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 15 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS
Presence of m loop-closure constraint equations (see Module
4,Lecture 1)
hi (q) = 0; i = 1;2; :::;m (11)
q 2n+m n actuated joint variables, q , and m passive
jointvariables f .To obtain equations of motion for a system with
constraints !Lagrange multipliers (Goldstein 1980, Haug
1989).Lagrangian written as
L (q; _q) =L (q; _q)m
j=1
ljhj(q) (12)
m lj s introduced (unknown) Lagrange multipliers.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 15 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS
Presence of m loop-closure constraint equations (see Module
4,Lecture 1)
hi (q) = 0; i = 1;2; :::;m (11)
q 2n+m n actuated joint variables, q , and m passive
jointvariables f .To obtain equations of motion for a system with
constraints !Lagrange multipliers (Goldstein 1980, Haug
1989).Lagrangian written as
L (q; _q) =L (q; _q)m
j=1
ljhj(q) (12)
m lj s introduced (unknown) Lagrange multipliers.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 15 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
m constraints, hj(q) = 0, are holonomic only functions of q.For
holonomic constraints, equations of motion are
ddt
L _qi
Lqi
= ti +m
j=1
ljhj(q)qi
i = 1;2; :::;n+m (13)
In matrix form,
[M(q)]q+[C(q; _q)] _q+G(q) = t+[(q)]Tl (14)
l is the m1 vector of unknown Lagrange multipliersConstraint
matrix [(q)] is obtained from the partial derivatives of
mconstraint equations with respect to qiConcatenation [] = [ [K ] j
[K ] ] (see Module 5, Lecture 3 )
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 16 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
m constraints, hj(q) = 0, are holonomic only functions of q.For
holonomic constraints, equations of motion are
ddt
L _qi
Lqi
= ti +m
j=1
ljhj(q)qi
i = 1;2; :::;n+m (13)
In matrix form,
[M(q)]q+[C(q; _q)] _q+G(q) = t+[(q)]Tl (14)
l is the m1 vector of unknown Lagrange multipliersConstraint
matrix [(q)] is obtained from the partial derivatives of
mconstraint equations with respect to qiConcatenation [] = [ [K ] j
[K ] ] (see Module 5, Lecture 3 )
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 16 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
m constraints, hj(q) = 0, are holonomic only functions of q.For
holonomic constraints, equations of motion are
ddt
L _qi
Lqi
= ti +m
j=1
ljhj(q)qi
i = 1;2; :::;n+m (13)
In matrix form,
[M(q)]q+[C(q; _q)] _q+G(q) = t+[(q)]Tl (14)
l is the m1 vector of unknown Lagrange multipliersConstraint
matrix [(q)] is obtained from the partial derivatives of
mconstraint equations with respect to qiConcatenation [] = [ [K ] j
[K ] ] (see Module 5, Lecture 3 )
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 16 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
To determine lTwice differentiate m constraint equations with
respect to t
[(q)]q+[ _(q)] _q= 0 (15)
_[] is a m (n+m) matrix containing the time derivatives of each
ofthe elements of [].Since the mass matrix [M(q)] is always
invertible
q= [M]1(t [C] _qG)+ [M]1[]TlSubstituting q in equation (15)
l =([][M]1[]T )1f _[] _q+[][M]1(t [C] _qG)g (16)
Substitute l back into equation (14) ! equations of motion[M]q=
f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (17)
f denotes (t [C] _qG).ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED
CONCEPTS & ANALYSIS NPTEL, 2010 17 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
To determine lTwice differentiate m constraint equations with
respect to t
[(q)]q+[ _(q)] _q= 0 (15)
_[] is a m (n+m) matrix containing the time derivatives of each
ofthe elements of [].Since the mass matrix [M(q)] is always
invertible
q= [M]1(t [C] _qG)+ [M]1[]TlSubstituting q in equation (15)
l =([][M]1[]T )1f _[] _q+[][M]1(t [C] _qG)g (16)
Substitute l back into equation (14) ! equations of motion[M]q=
f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (17)
f denotes (t [C] _qG).ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED
CONCEPTS & ANALYSIS NPTEL, 2010 17 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
Mass matrix [M] is (n+m) (n+m), positive definite and
symmetricmatrixCentripetal/Coriolis terms and the gravity terms are
(n+m)1vectors.[(q)]Tl has units of torque/force constraint
forces/torques.
Work done by constraint forces [ [(q)]Tl ]T _q ! lT [(q)]
_q[(q)] _q= 0 from definition of constraint matrix
Useful to obtain constraint forces/torques for mechanical design
of thejoints and linksMost multi-body dynamics software packages
(see, for example,ADAMS 2002) compute and provide the constraint
forces and torques.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 18 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
Mass matrix [M] is (n+m) (n+m), positive definite and
symmetricmatrixCentripetal/Coriolis terms and the gravity terms are
(n+m)1vectors.[(q)]Tl has units of torque/force constraint
forces/torques.
Work done by constraint forces [ [(q)]Tl ]T _q ! lT [(q)]
_q[(q)] _q= 0 from definition of constraint matrix
Useful to obtain constraint forces/torques for mechanical design
of thejoints and linksMost multi-body dynamics software packages
(see, for example,ADAMS 2002) compute and provide the constraint
forces and torques.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 18 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
Mass matrix [M] is (n+m) (n+m), positive definite and
symmetricmatrixCentripetal/Coriolis terms and the gravity terms are
(n+m)1vectors.[(q)]Tl has units of torque/force constraint
forces/torques.
Work done by constraint forces [ [(q)]Tl ]T _q ! lT [(q)]
_q[(q)] _q= 0 from definition of constraint matrix
Useful to obtain constraint forces/torques for mechanical design
of thejoints and linksMost multi-body dynamics software packages
(see, for example,ADAMS 2002) compute and provide the constraint
forces and torques.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 18 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
Mass matrix [M] is (n+m) (n+m), positive definite and
symmetricmatrixCentripetal/Coriolis terms and the gravity terms are
(n+m)1vectors.[(q)]Tl has units of torque/force constraint
forces/torques.
Work done by constraint forces [ [(q)]Tl ]T _q ! lT [(q)]
_q[(q)] _q= 0 from definition of constraint matrix
Useful to obtain constraint forces/torques for mechanical design
of thejoints and linksMost multi-body dynamics software packages
(see, for example,ADAMS 2002) compute and provide the constraint
forces and torques.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 18 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONPARALLEL MANIPULATORS (CONTD.)
Mass matrix [M] is (n+m) (n+m), positive definite and
symmetricmatrixCentripetal/Coriolis terms and the gravity terms are
(n+m)1vectors.[(q)]Tl has units of torque/force constraint
forces/torques.
Work done by constraint forces [ [(q)]Tl ]T _q ! lT [(q)]
_q[(q)] _q= 0 from definition of constraint matrix
Useful to obtain constraint forces/torques for mechanical design
of thejoints and linksMost multi-body dynamics software packages
(see, for example,ADAMS 2002) compute and provide the constraint
forces and torques.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 18 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONNON-HOLONOMIC CONSTRAINTS
In mobile robots and few other mechanical systems, constraints
arenon-holonomic, non-integrable constraintsConstraints can also
contain explicit functions of time.Lagrangian formulation for such
systems
General constraints in the so-called Pfaffian form
(t)+ [(q)] _q= 0 (18)
Differentiate to get[]q+ _[] _q+ _(t) = 0
Equations of motion
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _(t)+ _[] _qg (19)l given
by
l =([][M]1[]T )1f _(t)+ _[] _q+[][M]1(t [C] _qG)g(20)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 19 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONNON-HOLONOMIC CONSTRAINTS
In mobile robots and few other mechanical systems, constraints
arenon-holonomic, non-integrable constraintsConstraints can also
contain explicit functions of time.Lagrangian formulation for such
systems
General constraints in the so-called Pfaffian form
(t)+ [(q)] _q= 0 (18)
Differentiate to get[]q+ _[] _q+ _(t) = 0
Equations of motion
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _(t)+ _[] _qg (19)l given
by
l =([][M]1[]T )1f _(t)+ _[] _q+[][M]1(t [C] _qG)g(20)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 19 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONNON-HOLONOMIC CONSTRAINTS
In mobile robots and few other mechanical systems, constraints
arenon-holonomic, non-integrable constraintsConstraints can also
contain explicit functions of time.Lagrangian formulation for such
systems
General constraints in the so-called Pfaffian form
(t)+ [(q)] _q= 0 (18)
Differentiate to get[]q+ _[] _q+ _(t) = 0
Equations of motion
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _(t)+ _[] _qg (19)l given
by
l =([][M]1[]T )1f _(t)+ _[] _q+[][M]1(t [C] _qG)g(20)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 19 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONNON-HOLONOMIC CONSTRAINTS
In mobile robots and few other mechanical systems, constraints
arenon-holonomic, non-integrable constraintsConstraints can also
contain explicit functions of time.Lagrangian formulation for such
systems
General constraints in the so-called Pfaffian form
(t)+ [(q)] _q= 0 (18)
Differentiate to get[]q+ _[] _q+ _(t) = 0
Equations of motion
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _(t)+ _[] _qg (19)l given
by
l =([][M]1[]T )1f _(t)+ _[] _q+[][M]1(t [C] _qG)g(20)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 19 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONNON-HOLONOMIC CONSTRAINTS
In mobile robots and few other mechanical systems, constraints
arenon-holonomic, non-integrable constraintsConstraints can also
contain explicit functions of time.Lagrangian formulation for such
systems
General constraints in the so-called Pfaffian form
(t)+ [(q)] _q= 0 (18)
Differentiate to get[]q+ _[] _q+ _(t) = 0
Equations of motion
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _(t)+ _[] _qg (19)l given
by
l =([][M]1[]T )1f _(t)+ _[] _q+[][M]1(t [C] _qG)g(20)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 19 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONSUMMARY
Equations of motion for serial, parallel manipulators and
multi-bodysystem (even with non-holonomic constraints) can be
obtained usingLagrangian formulation.Equations of motion obtained
using Lagrangian formulation does notcontain friction or any other
dissipative term.Friction accommodated in ad-hoc manner in the
right-hand side atappropriate place.
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q) (21)
Friction term, F(q; _q), looks similar to centripetal/Coriolis
term butactually very different!!Typical friction = sum of a
constant (Coulomb friction) + termproportional to _q (viscous
damping).Equations of motion does not contain effects of
flexibility, backlash,and other unmodeled dynamics.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 20 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONSUMMARY
Equations of motion for serial, parallel manipulators and
multi-bodysystem (even with non-holonomic constraints) can be
obtained usingLagrangian formulation.Equations of motion obtained
using Lagrangian formulation does notcontain friction or any other
dissipative term.Friction accommodated in ad-hoc manner in the
right-hand side atappropriate place.
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q) (21)
Friction term, F(q; _q), looks similar to centripetal/Coriolis
term butactually very different!!Typical friction = sum of a
constant (Coulomb friction) + termproportional to _q (viscous
damping).Equations of motion does not contain effects of
flexibility, backlash,and other unmodeled dynamics.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 20 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONSUMMARY
Equations of motion for serial, parallel manipulators and
multi-bodysystem (even with non-holonomic constraints) can be
obtained usingLagrangian formulation.Equations of motion obtained
using Lagrangian formulation does notcontain friction or any other
dissipative term.Friction accommodated in ad-hoc manner in the
right-hand side atappropriate place.
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q) (21)
Friction term, F(q; _q), looks similar to centripetal/Coriolis
term butactually very different!!Typical friction = sum of a
constant (Coulomb friction) + termproportional to _q (viscous
damping).Equations of motion does not contain effects of
flexibility, backlash,and other unmodeled dynamics.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 20 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONSUMMARY
Equations of motion for serial, parallel manipulators and
multi-bodysystem (even with non-holonomic constraints) can be
obtained usingLagrangian formulation.Equations of motion obtained
using Lagrangian formulation does notcontain friction or any other
dissipative term.Friction accommodated in ad-hoc manner in the
right-hand side atappropriate place.
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q) (21)
Friction term, F(q; _q), looks similar to centripetal/Coriolis
term butactually very different!!Typical friction = sum of a
constant (Coulomb friction) + termproportional to _q (viscous
damping).Equations of motion does not contain effects of
flexibility, backlash,and other unmodeled dynamics.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 20 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONSUMMARY
Equations of motion for serial, parallel manipulators and
multi-bodysystem (even with non-holonomic constraints) can be
obtained usingLagrangian formulation.Equations of motion obtained
using Lagrangian formulation does notcontain friction or any other
dissipative term.Friction accommodated in ad-hoc manner in the
right-hand side atappropriate place.
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q) (21)
Friction term, F(q; _q), looks similar to centripetal/Coriolis
term butactually very different!!Typical friction = sum of a
constant (Coulomb friction) + termproportional to _q (viscous
damping).Equations of motion does not contain effects of
flexibility, backlash,and other unmodeled dynamics.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 20 / 74
-
. . . . . .
LAGRANGIAN FORMULATIONSUMMARY
Equations of motion for serial, parallel manipulators and
multi-bodysystem (even with non-holonomic constraints) can be
obtained usingLagrangian formulation.Equations of motion obtained
using Lagrangian formulation does notcontain friction or any other
dissipative term.Friction accommodated in ad-hoc manner in the
right-hand side atappropriate place.
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q) (21)
Friction term, F(q; _q), looks similar to centripetal/Coriolis
term butactually very different!!Typical friction = sum of a
constant (Coulomb friction) + termproportional to _q (viscous
damping).Equations of motion does not contain effects of
flexibility, backlash,and other unmodeled dynamics.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 20 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE
Equations of motion in joint space function of q and _qEquations
of motion in terms of position and orientation ofend-effector
(Khatib 1987).Useful for Cartesian space motion and force
control.Equations of motion given as
F = [MX (q)] X +CX (q; _q)+GX (q) (22)
F is a 61 entity of forces and moments acting on the
end-effector,X is 61 entity representing the position and
orientation of theend-effector.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 21 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE
Equations of motion in joint space function of q and _qEquations
of motion in terms of position and orientation ofend-effector
(Khatib 1987).Useful for Cartesian space motion and force
control.Equations of motion given as
F = [MX (q)] X +CX (q; _q)+GX (q) (22)
F is a 61 entity of forces and moments acting on the
end-effector,X is 61 entity representing the position and
orientation of theend-effector.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 21 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE
Equations of motion in joint space function of q and _qEquations
of motion in terms of position and orientation ofend-effector
(Khatib 1987).Useful for Cartesian space motion and force
control.Equations of motion given as
F = [MX (q)] X +CX (q; _q)+GX (q) (22)
F is a 61 entity of forces and moments acting on the
end-effector,X is 61 entity representing the position and
orientation of theend-effector.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 21 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE
Equations of motion in joint space function of q and _qEquations
of motion in terms of position and orientation ofend-effector
(Khatib 1987).Useful for Cartesian space motion and force
control.Equations of motion given as
F = [MX (q)] X +CX (q; _q)+GX (q) (22)
F is a 61 entity of forces and moments acting on the
end-effector,X is 61 entity representing the position and
orientation of theend-effector.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 21 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE (CONTD.)[MX (q)], CX (q;
_q), and GX (q) analogous to mass matrix,Coriolis/centripetal and
gravity term, respectively.Relationships between Cartesian and
joint space terms
t = [J(q)]TF[MX (q)] = [J(q)]T [M(q)][J(q)]1
CX (q; _q) = [J(q)]T (C(q; _q) [M(q)][J(q)]1 _[J(q)] _q)GX (q) =
[J(q)]TG(q) (23)
[J(q)]T denotes the inverse of [J(q)]T ,[J(q)], F and X are in
the same coordinate system.
q, _q can be (at least conceptually) replaced with the
Cartesianvariables inverse kinematics and inverse
Jacobian.Difficult (if not impossible) for practical
manipulators!Fortunately replacement not required for Cartesian
space motion andforce control!!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 22 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE (CONTD.)[MX (q)], CX (q;
_q), and GX (q) analogous to mass matrix,Coriolis/centripetal and
gravity term, respectively.Relationships between Cartesian and
joint space terms
t = [J(q)]TF[MX (q)] = [J(q)]T [M(q)][J(q)]1
CX (q; _q) = [J(q)]T (C(q; _q) [M(q)][J(q)]1 _[J(q)] _q)GX (q) =
[J(q)]TG(q) (23)
[J(q)]T denotes the inverse of [J(q)]T ,[J(q)], F and X are in
the same coordinate system.
q, _q can be (at least conceptually) replaced with the
Cartesianvariables inverse kinematics and inverse
Jacobian.Difficult (if not impossible) for practical
manipulators!Fortunately replacement not required for Cartesian
space motion andforce control!!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 22 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE (CONTD.)[MX (q)], CX (q;
_q), and GX (q) analogous to mass matrix,Coriolis/centripetal and
gravity term, respectively.Relationships between Cartesian and
joint space terms
t = [J(q)]TF[MX (q)] = [J(q)]T [M(q)][J(q)]1
CX (q; _q) = [J(q)]T (C(q; _q) [M(q)][J(q)]1 _[J(q)] _q)GX (q) =
[J(q)]TG(q) (23)
[J(q)]T denotes the inverse of [J(q)]T ,[J(q)], F and X are in
the same coordinate system.
q, _q can be (at least conceptually) replaced with the
Cartesianvariables inverse kinematics and inverse
Jacobian.Difficult (if not impossible) for practical
manipulators!Fortunately replacement not required for Cartesian
space motion andforce control!!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 22 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE (CONTD.)[MX (q)], CX (q;
_q), and GX (q) analogous to mass matrix,Coriolis/centripetal and
gravity term, respectively.Relationships between Cartesian and
joint space terms
t = [J(q)]TF[MX (q)] = [J(q)]T [M(q)][J(q)]1
CX (q; _q) = [J(q)]T (C(q; _q) [M(q)][J(q)]1 _[J(q)] _q)GX (q) =
[J(q)]TG(q) (23)
[J(q)]T denotes the inverse of [J(q)]T ,[J(q)], F and X are in
the same coordinate system.
q, _q can be (at least conceptually) replaced with the
Cartesianvariables inverse kinematics and inverse
Jacobian.Difficult (if not impossible) for practical
manipulators!Fortunately replacement not required for Cartesian
space motion andforce control!!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 22 / 74
-
. . . . . .
EQUATIONS OF MOTION IN CARTESIAN SPACE (CONTD.)[MX (q)], CX (q;
_q), and GX (q) analogous to mass matrix,Coriolis/centripetal and
gravity term, respectively.Relationships between Cartesian and
joint space terms
t = [J(q)]TF[MX (q)] = [J(q)]T [M(q)][J(q)]1
CX (q; _q) = [J(q)]T (C(q; _q) [M(q)][J(q)]1 _[J(q)] _q)GX (q) =
[J(q)]TG(q) (23)
[J(q)]T denotes the inverse of [J(q)]T ,[J(q)], F and X are in
the same coordinate system.
q, _q can be (at least conceptually) replaced with the
Cartesianvariables inverse kinematics and inverse
Jacobian.Difficult (if not impossible) for practical
manipulators!Fortunately replacement not required for Cartesian
space motion andforce control!!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 22 / 74
-
. . . . . .
OUTLINE.. .1 CONTENTS.. .2 LECTURE 1
IntroductionLagrangian formulation
.. .3 LECTURE 2Examples of Equations of Motion
.. .4 LECTURE 3Inverse Dynamics & Simulation of Equations of
Motion
.. .5 LECTURE 4
Recursive Formulations of Dynamics of Manipulators
.. .6 MODULE 6 ADDITIONAL MATERIALMaple Tutorial, ADAMS
Tutorial, Problems, References andSuggested Reading
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 23 / 74
-
. . . . . .
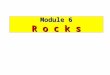
EXAMPLESPLANAR 2R MANIPULATOR
Simplest possible serial manipulatorTwo moving links, 2 joint
variables q1 and q2Joint torques t1 and t2.
Link 2
O2
X 0
Y 0
{ 0}
Location of cg of Link 1
Location of cg of Link 2
(m2, l 2, , I 2)
(m1, l 1, r 1, I 1)
O1
1
2
12
g
Link 1
r2
Figure 2: A 2R manipulator
Gravity along ( 0Y^0)axis.(mi ; li ; ri ; Ii ); i = 1;2denote
mass, length, CGlocation and Izzcomponent of inertiamatrix,
respectively.Planar case ! only Izzrelevant.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 24 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Velocity propagation to find linear and angular velocitiesf0g
fixed ! 0w0 =0 V0 = 0.i=1
1w1 = (0 0 _q1)T1V1 = 0
1VC1 = 0+(0 0 _q1)T (r1 0 0)T = (0 r1 _q1 0)T
i=22w2 = (0 0 _q1+ _q2)T
2V2 =
0@ c2 s2 0s2 c2 00 0 1
1A0@ 0l1 _q10
1A=0@ l1s2 _q1l1c2 _q1
0
1A2VC2 =
2V2+2w2 (r2 0 0)T
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 25 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Velocity propagation to find linear and angular velocitiesf0g
fixed ! 0w0 =0 V0 = 0.i=1
1w1 = (0 0 _q1)T1V1 = 0
1VC1 = 0+(0 0 _q1)T (r1 0 0)T = (0 r1 _q1 0)T
i=22w2 = (0 0 _q1+ _q2)T
2V2 =
0@ c2 s2 0s2 c2 00 0 1
1A0@ 0l1 _q10
1A=0@ l1s2 _q1l1c2 _q1
0
1A2VC2 =
2V2+2w2 (r2 0 0)T
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 25 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Velocity propagation to find linear and angular velocitiesf0g
fixed ! 0w0 =0 V0 = 0.i=1
1w1 = (0 0 _q1)T1V1 = 0
1VC1 = 0+(0 0 _q1)T (r1 0 0)T = (0 r1 _q1 0)T
i=22w2 = (0 0 _q1+ _q2)T
2V2 =
0@ c2 s2 0s2 c2 00 0 1
1A0@ 0l1 _q10
1A=0@ l1s2 _q1l1c2 _q1
0
1A2VC2 =
2V2+2w2 (r2 0 0)T
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 25 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Velocity propagation to find linear and angular velocitiesf0g
fixed ! 0w0 =0 V0 = 0.i=1
1w1 = (0 0 _q1)T1V1 = 0
1VC1 = 0+(0 0 _q1)T (r1 0 0)T = (0 r1 _q1 0)T
i=22w2 = (0 0 _q1+ _q2)T
2V2 =
0@ c2 s2 0s2 c2 00 0 1
1A0@ 0l1 _q10
1A=0@ l1s2 _q1l1c2 _q1
0
1A2VC2 =
2V2+2w2 (r2 0 0)T
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 25 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _q2)2+
12m2(l21 _q21 + r22 ( _q1+ _q2)2+2l1r2c2 _q1( _q1+ _q2))
(24)
Link 1 first two terms; Link 2 second two terms.Total potential
energy
PE =m1gr1s1+m2g(l1s1+ r2s12) (25)
Lagrangian for planar 2R manipulator
L (; _) = KE PE ; = (q1;q2)T (26)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 26 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _q2)2+
12m2(l21 _q21 + r22 ( _q1+ _q2)2+2l1r2c2 _q1( _q1+ _q2))
(24)
Link 1 first two terms; Link 2 second two terms.Total potential
energy
PE =m1gr1s1+m2g(l1s1+ r2s12) (25)
Lagrangian for planar 2R manipulator
L (; _) = KE PE ; = (q1;q2)T (26)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 26 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _q2)2+
12m2(l21 _q21 + r22 ( _q1+ _q2)2+2l1r2c2 _q1( _q1+ _q2))
(24)
Link 1 first two terms; Link 2 second two terms.Total potential
energy
PE =m1gr1s1+m2g(l1s1+ r2s12) (25)
Lagrangian for planar 2R manipulator
L (; _) = KE PE ; = (q1;q2)T (26)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 26 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Partial derivatives of L with respect to qi ; i = 1;2
Lq1
= m1gr1c1m2g(l1c1+ r2c12)Lq2
= m2l1r2s2 _q1( _q1+ _q2)m2gr2c12
Partial derivatives of L with respect to _qi ; i = 1;2
L _q1
= (I1+ I2+m1r21 +m2l21 +m2r
22 +2m2l1r2c2) _q1
+(I2+m2r22 +m2l1r2c2) _q2L _q2
= (I2+m2r22 +m2l1r2c2) _q1+(I2+m2r22 ) _q2
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 27 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Partial derivatives of L with respect to qi ; i = 1;2
Lq1
= m1gr1c1m2g(l1c1+ r2c12)Lq2
= m2l1r2s2 _q1( _q1+ _q2)m2gr2c12
Partial derivatives of L with respect to _qi ; i = 1;2
L _q1
= (I1+ I2+m1r21 +m2l21 +m2r
22 +2m2l1r2c2) _q1
+(I2+m2r22 +m2l1r2c2) _q2L _q2
= (I2+m2r22 +m2l1r2c2) _q1+(I2+m2r22 ) _q2
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 27 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Derivatives of L _qi
with respect to t
ddt
(L _q1
) = q1(I1+ I2+m1r21 +m2r22 +m2l21 +2m2l1r2c2)
+ q2(I2+m2r22 +m2l1r2c2)m2l1r2s2 _q2(2 _q1+ _q2)ddt
(L _q2
) = q1(I2+m2r22 +m2l1r2c2)
+ q2(I2+m2r22 )m2l1r2s2 _q1 _q2Assemble terms, collect and
simplify
t1 = q1(I1+ I2+m2l21 +m1r21 +m2r22 +2m2l1r2c2)+q2(I2+m2r22
+m2l1r2c2)m2l1r2s2(2 _q1+ _q2) _q2+m2g(l1c1+ r2c12)+m1gr1c1
t2 = q1(I2+m2r22 +m2l1r2c2)+ q2(I2+m2r22 )+m2l1r2s2 _q21
+m2r2gc12
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 28 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR (CONTD.)
Derivatives of L _qi
with respect to t
ddt
(L _q1
) = q1(I1+ I2+m1r21 +m2r22 +m2l21 +2m2l1r2c2)
+ q2(I2+m2r22 +m2l1r2c2)m2l1r2s2 _q2(2 _q1+ _q2)ddt
(L _q2
) = q1(I2+m2r22 +m2l1r2c2)
+ q2(I2+m2r22 )m2l1r2s2 _q1 _q2Assemble terms, collect and
simplify
t1 = q1(I1+ I2+m2l21 +m1r21 +m2r22 +2m2l1r2c2)+q2(I2+m2r22
+m2l1r2c2)m2l1r2s2(2 _q1+ _q2) _q2+m2g(l1c1+ r2c12)+m1gr1c1
t2 = q1(I2+m2r22 +m2l1r2c2)+ q2(I2+m2r22 )+m2l1r2s2 _q21
+m2r2gc12
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 28 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR EQUATIONS OF MOTION
Equations of motion two nonlinear ODEs in standard formt1t2
=
I1+ I2+m2l21 +m1r21 +m2r
22 +2m2l1r2c2 I2+m2r
22 +m2l1r2c2
I2+m2r22 +m2l1r2c2 I2+m2r22
q1q2
+
m2l1r2s2(2 _q1+ _q2) _q2m2l1r2s2 _q21
+
m2g(l1c1+ r2c12)+m1gr1c1
m2r2gc12
(27)
In the above matrix equation
22 matrix is the mass matrix,21 vector with _q1 _q2 is the
centripetal/Coriolis term, and21 vector with g is the gravity
term.
As mentioned no friction or dissipative terms in equations of
motion.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 29 / 74
-
. . . . . .
EXAMPLESPLANAR 2R MANIPULATOR EQUATIONS OF MOTION
Equations of motion two nonlinear ODEs in standard formt1t2
=
I1+ I2+m2l21 +m1r21 +m2r
22 +2m2l1r2c2 I2+m2r
22 +m2l1r2c2
I2+m2r22 +m2l1r2c2 I2+m2r22
q1q2
+
m2l1r2s2(2 _q1+ _q2) _q2m2l1r2s2 _q21
+
m2g(l1c1+ r2c12)+m1gr1c1
m2r2gc12
(27)
In the above matrix equation
22 matrix is the mass matrix,21 vector with _q1 _q2 is the
centripetal/Coriolis term, and21 vector with g is the gravity
term.
As mentioned no friction or dissipative terms in equations of
motion.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 29 / 74
-
. . . . . .
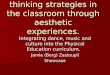
EXAMPLESPLANAR FOUR-BAR MECHANISM
Simplest possible one degree-of-freedom closed-loop
mechanism!Three moving links ! q1 actuated, fi ; i = 1;2;3 passive,
t1 actuatingtorque.
l0
{L}
2
1
YL
XL
YR
XR
{R}
3
O2
O3
OL, O1
(m1, l1, r1, I1)
OR
(m2, l2, r2, I2)
(m3, l3, r3, I3)
Location of cg of links1 1
g
Link 1
Link 2
Link 3
Figure 3: A planar four-bar mechanism
Geometry and inertialparameters of links (mi ; li ; ri ; Ii )
for i = 1;2;3.Only Izz component of theinertia matrix of each link
isrelevant.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 30 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
Break four-bar mechanism at O3 ! planar 2R + planar 1RKE of
planar 2R similar q2 replaced by f2KE of 1R 12m3r
23_f21 +
12 I3 _f
21
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _f2)2+
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))+
12m3r23 _f21 +
12I3 _f21 (28)
Total potential energy planar 2R + planar 1R
PE =m1gr1 sin(q1)+m2g(l1 sin(q1)+ r2 sin(q1+f2))+m3gr3
sin(f1)(29)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 31 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
Break four-bar mechanism at O3 ! planar 2R + planar 1RKE of
planar 2R similar q2 replaced by f2KE of 1R 12m3r
23_f21 +
12 I3 _f
21
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _f2)2+
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))+
12m3r23 _f21 +
12I3 _f21 (28)
Total potential energy planar 2R + planar 1R
PE =m1gr1 sin(q1)+m2g(l1 sin(q1)+ r2 sin(q1+f2))+m3gr3
sin(f1)(29)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 31 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
Break four-bar mechanism at O3 ! planar 2R + planar 1RKE of
planar 2R similar q2 replaced by f2KE of 1R 12m3r
23_f21 +
12 I3 _f
21
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _f2)2+
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))+
12m3r23 _f21 +
12I3 _f21 (28)
Total potential energy planar 2R + planar 1R
PE =m1gr1 sin(q1)+m2g(l1 sin(q1)+ r2 sin(q1+f2))+m3gr3
sin(f1)(29)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 31 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
Break four-bar mechanism at O3 ! planar 2R + planar 1RKE of
planar 2R similar q2 replaced by f2KE of 1R 12m3r
23_f21 +
12 I3 _f
21
Total kinetic energy
KE =12m1(r1 _q1)2+
12I1 _q21 +
12I2( _q1+ _f2)2+
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))+
12m3r23 _f21 +
12I3 _f21 (28)
Total potential energy planar 2R + planar 1R
PE =m1gr1 sin(q1)+m2g(l1 sin(q1)+ r2 sin(q1+f2))+m3gr3
sin(f1)(29)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 31 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
Lagrangian for the planar 2R + planar 1R mechanisms
L (q; _q) =12I1 _q21 +
12I2( _q1+ _f2)2+
12I3 _f21 +
12m1r21 _q21 +
12m3r23 _f21
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))
m1gr1 sin(q1)m2g(l1 sin(q1+ r2 sin(q1+f2))m3gr3 sin(f1) (30)
Constraint equations of the planar four-bar (see Module 4,
Lecture 1)
l1 cos(q1)+ l2 cos(q1+f2) = l0+ l3 cos(f1)l1 sin(q1)+ l2
sin(q1+f2) = l3 sin(f1) (31)
Perform partial derivatives with respect to q and _q and
timederivatives (see Lagrangian formulation)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 32 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
Lagrangian for the planar 2R + planar 1R mechanisms
L (q; _q) =12I1 _q21 +
12I2( _q1+ _f2)2+
12I3 _f21 +
12m1r21 _q21 +
12m3r23 _f21
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))
m1gr1 sin(q1)m2g(l1 sin(q1+ r2 sin(q1+f2))m3gr3 sin(f1) (30)
Constraint equations of the planar four-bar (see Module 4,
Lecture 1)
l1 cos(q1)+ l2 cos(q1+f2) = l0+ l3 cos(f1)l1 sin(q1)+ l2
sin(q1+f2) = l3 sin(f1) (31)
Perform partial derivatives with respect to q and _q and
timederivatives (see Lagrangian formulation)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 32 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
Lagrangian for the planar 2R + planar 1R mechanisms
L (q; _q) =12I1 _q21 +
12I2( _q1+ _f2)2+
12I3 _f21 +
12m1r21 _q21 +
12m3r23 _f21
12m2(l21 _q21 + r22 ( _q1+ _f2)2+2l1r2 cos(f2) _q1( _q1+
_f2))
m1gr1 sin(q1)m2g(l1 sin(q1+ r2 sin(q1+f2))m3gr3 sin(f1) (30)
Constraint equations of the planar four-bar (see Module 4,
Lecture 1)
l1 cos(q1)+ l2 cos(q1+f2) = l0+ l3 cos(f1)l1 sin(q1)+ l2
sin(q1+f2) = l3 sin(f1) (31)
Perform partial derivatives with respect to q and _q and
timederivatives (see Lagrangian formulation)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 32 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
33 mass matrix [M(q)]24 I2+m2r22+ I1+m2l12+2m2l1 r2cos(f2)+m1
r12 ; I2+m2r22+m2l1 r2cos(f2) ;0I2+m2 r22+m2l1r2cos(f2) ; I2+m2r22
;00 ; 0 ;m3r32+ I3
3533 Coriolis/Centripetal terms [C(q; _q)]24 m2 l1 r2 sin(f2)
_f2 m2 l1 r2 sin(f2) _q1m2 l1 r2 sin(f2) _f2 0m2 l1 r2 sin(f2) _q1
0 0
0 0 0
3531 vector of gravity terms G(q)24 m1 g r1 cos(q1)+m2 g (l1
cos(q1)+ r2 cos(q1+f2))m2 g r2 cos(q1+f2)
m3 g r3 cos(f1)
35
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 33 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
Equations of motion of the planar 2R + 1R mechanisms
t1 = (m2 r2 cos(q1+f2)+m1 r1 cos(q1)+m2l1 cos(q1))g+(I2+m2 r22+
I1+m2 l12+2m2 l1 r2 cos(f2)+m1 r12) q1+(I2+m2 r22+m2 l1 r2 cos(f2))
f2m2 l1 r2 sin(f2)( _f2)22m2 l1 r2 sin(f2) _q1 _f2
t2 =m2 g r2 cos(q1+f2)+(I2+m2 r22+m2 l1 r2 cos(f2)) q1+(I2+m2
r22) f2+m2 l1 r2 sin(f2) _q21
t3 =m3 g r3 cos(f1)+(m3 r32+ I3) f1 (32)
Three non-linear ordinary differential equations.Constraint
equations not yet taken in to account ! Third equationnot related
to the other two!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 34 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
Equations of motion of the planar 2R + 1R mechanisms
t1 = (m2 r2 cos(q1+f2)+m1 r1 cos(q1)+m2l1 cos(q1))g+(I2+m2 r22+
I1+m2 l12+2m2 l1 r2 cos(f2)+m1 r12) q1+(I2+m2 r22+m2 l1 r2 cos(f2))
f2m2 l1 r2 sin(f2)( _f2)22m2 l1 r2 sin(f2) _q1 _f2
t2 =m2 g r2 cos(q1+f2)+(I2+m2 r22+m2 l1 r2 cos(f2)) q1+(I2+m2
r22) f2+m2 l1 r2 sin(f2) _q21
t3 =m3 g r3 cos(f1)+(m3 r32+ I3) f1 (32)
Three non-linear ordinary differential equations.Constraint
equations not yet taken in to account ! Third equationnot related
to the other two!
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 34 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
23 constraint matrix [(q)] l1 sin(q1) l2 sin(q1+f2) l2
sin(q1+f2) l3 sin(f1)l1 cos(q1)+ l2 cos(q1+f2) l2 cos(q1+f2) l3
cos(f1)
Obtain derivative of constraint equations
[(q)]q+[ _(q)] _q= 0
Obtain q from equation of motion
q= [M]1(t [C] _qG)+ [M]1[]TlSubstitute q in derivative of
constraint equation and solve for lSubstitute l to obtain equations
of motion of planar four-barmechanism
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (33)where f = (t [C]
_qG) and q= (q1;f2;f1)T .
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 35 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
23 constraint matrix [(q)] l1 sin(q1) l2 sin(q1+f2) l2
sin(q1+f2) l3 sin(f1)l1 cos(q1)+ l2 cos(q1+f2) l2 cos(q1+f2) l3
cos(f1)
Obtain derivative of constraint equations
[(q)]q+[ _(q)] _q= 0
Obtain q from equation of motion
q= [M]1(t [C] _qG)+ [M]1[]TlSubstitute q in derivative of
constraint equation and solve for lSubstitute l to obtain equations
of motion of planar four-barmechanism
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (33)where f = (t [C]
_qG) and q= (q1;f2;f1)T .
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 35 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
23 constraint matrix [(q)] l1 sin(q1) l2 sin(q1+f2) l2
sin(q1+f2) l3 sin(f1)l1 cos(q1)+ l2 cos(q1+f2) l2 cos(q1+f2) l3
cos(f1)
Obtain derivative of constraint equations
[(q)]q+[ _(q)] _q= 0
Obtain q from equation of motion
q= [M]1(t [C] _qG)+ [M]1[]TlSubstitute q in derivative of
constraint equation and solve for lSubstitute l to obtain equations
of motion of planar four-barmechanism
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (33)where f = (t [C]
_qG) and q= (q1;f2;f1)T .
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 35 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
23 constraint matrix [(q)] l1 sin(q1) l2 sin(q1+f2) l2
sin(q1+f2) l3 sin(f1)l1 cos(q1)+ l2 cos(q1+f2) l2 cos(q1+f2) l3
cos(f1)
Obtain derivative of constraint equations
[(q)]q+[ _(q)] _q= 0
Obtain q from equation of motion
q= [M]1(t [C] _qG)+ [M]1[]TlSubstitute q in derivative of
constraint equation and solve for lSubstitute l to obtain equations
of motion of planar four-barmechanism
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (33)where f = (t [C]
_qG) and q= (q1;f2;f1)T .
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 35 / 74
-
. . . . . .
EXAMPLESPLANAR FOUR-BAR MECHANISM EQUATIONS OF MOTION
(CONTD.)
23 constraint matrix [(q)] l1 sin(q1) l2 sin(q1+f2) l2
sin(q1+f2) l3 sin(f1)l1 cos(q1)+ l2 cos(q1+f2) l2 cos(q1+f2) l3
cos(f1)
Obtain derivative of constraint equations
[(q)]q+[ _(q)] _q= 0
Obtain q from equation of motion
q= [M]1(t [C] _qG)+ [M]1[]TlSubstitute q in derivative of
constraint equation and solve for lSubstitute l to obtain equations
of motion of planar four-barmechanism
[M]q= f []T ([][M]1[]T )1f[][M]1f+ _[] _qg (33)where f = (t [C]
_qG) and q= (q1;f2;f1)T .
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 35 / 74
-
. . . . . .
OUTLINE.. .1 CONTENTS.. .2 LECTURE 1
IntroductionLagrangian formulation
.. .3 LECTURE 2Examples of Equations of Motion
.. .4 LECTURE 3Inverse Dynamics & Simulation of Equations of
Motion
.. .5 LECTURE 4
Recursive Formulations of Dynamics of Manipulators
.. .6 MODULE 6 ADDITIONAL MATERIALMaple Tutorial, ADAMS
Tutorial, Problems, References andSuggested Reading
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 36 / 74
-
. . . . . .
INTRODUCTION
Two problems in dynamics of robotsInverse dynamics given D-H and
inertial parameters and a trajectoryas a function of time, find
joint torques ! Obtain t(t) from knownq(t), _q(t) and q(t).Direct
problem given the kinematic and inertial parameters and thejoint
torques as functions of time, find the trajectory of themanipulator
! Obtain q(t) from known t(t).
Inverse dynamics is required for sizing of actuators and model
basedcontrol.Direct problem solution is required for
simulation.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 37 / 74
-
. . . . . .
INTRODUCTION
Two problems in dynamics of robotsInverse dynamics given D-H and
inertial parameters and a trajectoryas a function of time, find
joint torques ! Obtain t(t) from knownq(t), _q(t) and q(t).Direct
problem given the kinematic and inertial parameters and thejoint
torques as functions of time, find the trajectory of themanipulator
! Obtain q(t) from known t(t).
Inverse dynamics is required for sizing of actuators and model
basedcontrol.Direct problem solution is required for
simulation.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 37 / 74
-
. . . . . .
INTRODUCTION
Two problems in dynamics of robotsInverse dynamics given D-H and
inertial parameters and a trajectoryas a function of time, find
joint torques ! Obtain t(t) from knownq(t), _q(t) and q(t).Direct
problem given the kinematic and inertial parameters and thejoint
torques as functions of time, find the trajectory of themanipulator
! Obtain q(t) from known t(t).
Inverse dynamics is required for sizing of actuators and model
basedcontrol.Direct problem solution is required for
simulation.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 37 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTS
Inverse dynamics problem is very simple!Substitute qt, _q(t) and
q(t) in the right-hand side of equations ofmotion
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Obtain the left-hand side t(t).Can be done for any robot once
the equations of motion are known.Can be efficiently done in O(N)
steps using recursive algorithms.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 38 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTS
Inverse dynamics problem is very simple!Substitute qt, _q(t) and
q(t) in the right-hand side of equations ofmotion
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Obtain the left-hand side t(t).Can be done for any robot once
the equations of motion are known.Can be efficiently done in O(N)
steps using recursive algorithms.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 38 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTS
Inverse dynamics problem is very simple!Substitute qt, _q(t) and
q(t) in the right-hand side of equations ofmotion
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Obtain the left-hand side t(t).Can be done for any robot once
the equations of motion are known.Can be efficiently done in O(N)
steps using recursive algorithms.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 38 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTS
Inverse dynamics problem is very simple!Substitute qt, _q(t) and
q(t) in the right-hand side of equations ofmotion
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Obtain the left-hand side t(t).Can be done for any robot once
the equations of motion are known.Can be efficiently done in O(N)
steps using recursive algorithms.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 38 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTS
Inverse dynamics problem is very simple!Substitute qt, _q(t) and
q(t) in the right-hand side of equations ofmotion
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Obtain the left-hand side t(t).Can be done for any robot once
the equations of motion are known.Can be efficiently done in O(N)
steps using recursive algorithms.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 38 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTSPLANAR 2R EXAMPLE
Link 2
O2
X 0
Y 0
{ 0}
Location of cg of Link 1
Location of cg of Link 2
(m2, l 2, , I 2)
(m1, l 1, r 1, I 1)
O1
1
2
12
g
Link 1
r2
Figure 4: A 2R manipulator
Link Length Mass C.G. Inertia(m) (kg) (m) (kg m2)
1 1.0 12.456 0.773 1.0422 1.0 12.456 0.583 1.042
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 39 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTSPLANAR 2R EXAMPLE (CONTD.)
0 0.2 0.4 0.6 0.8 1 1.2 1.40
0.2
0.4
0.6
0.8
1
1.2
1.4
Circle traced by end-point
l 1 =1
l 2 =1
Figure 5: A 2R manipulator executing circular trajectory
Mass, inertia andgeometry as in TableChosen circular
trajectory
x = a+ r cos(f)y = b+ r sin(f)
r = 0:2, a = 1:2, b = 1:20 f 2p in 10 seconds
Planar 2R inverse dynamics trajectory movie
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 40 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTSPLANAR 2R EXAMPLE(CONTD.)
0 1 2 3 4 5 6 7 8 9 101.5
1
0.5
0
0.5
1
1.5
2Plot of Joints Angles for a 2R Manipulator
Time(Seconds)
Angle
(rad)
1
2
Figure 6: Computed q1 and q2 using inverse kinematics
0 1 2 3 4 5 6 7 8 9 100.4
0.3
0.2
0.1
0
0.1
0.2
0.3Plot of Joint Angular Velocities for a 2R Manipulator
Time(Seconds)
Angu
lar V
el.(ra
d/sec
2 )
1
2
Figure 7: Computed _q1 and _q2 using inverse Jacobian
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 41 / 74
-
. . . . . .
INVERSE DYNAMICS OF ROBOTSPLANAR 2R EXAMPLE (CONTD.)
0 1 2 3 4 5 6 7 8 9 100.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
Time(seconds)
Angu
lar A
cc.(ra
d/sec
2 )
Plot of Joint Angular Accelerations for a 2R Manipulator
1
2
Figure 8: Computed q1 and q2
0 1 2 3 4 5 6 7 8 9 1060
80
100
120
140
160
180Plot of Joint Torques for a 2R Manipulator
Time(Seconds)
Torq
ue(N
m)
1
2
Figure 9: Computed t1(t) and t2(t)
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 42 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTION
Simulation ! given external torque/forces obtain motion of
robot.General form of equations of motion of a n degree-of-freedom
robot
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Simulation ! given t(t) find q(t) by solving equations of
motion.n coupled, non-linear, second-order, ordinary differential
equations(ODEs).Cannot be solved analytically except for simplest
cases.Numerical solution of the ODEs Use of software such as Matlab
Rand in-built integration routine such as ODE45.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 43 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTION
Simulation ! given external torque/forces obtain motion of
robot.General form of equations of motion of a n degree-of-freedom
robot
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Simulation ! given t(t) find q(t) by solving equations of
motion.n coupled, non-linear, second-order, ordinary differential
equations(ODEs).Cannot be solved analytically except for simplest
cases.Numerical solution of the ODEs Use of software such as Matlab
Rand in-built integration routine such as ODE45.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 43 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTION
Simulation ! given external torque/forces obtain motion of
robot.General form of equations of motion of a n degree-of-freedom
robot
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Simulation ! given t(t) find q(t) by solving equations of
motion.n coupled, non-linear, second-order, ordinary differential
equations(ODEs).Cannot be solved analytically except for simplest
cases.Numerical solution of the ODEs Use of software such as Matlab
Rand in-built integration routine such as ODE45.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 43 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTION
Simulation ! given external torque/forces obtain motion of
robot.General form of equations of motion of a n degree-of-freedom
robot
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Simulation ! given t(t) find q(t) by solving equations of
motion.n coupled, non-linear, second-order, ordinary differential
equations(ODEs).Cannot be solved analytically except for simplest
cases.Numerical solution of the ODEs Use of software such as Matlab
Rand in-built integration routine such as ODE45.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 43 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTION
Simulation ! given external torque/forces obtain motion of
robot.General form of equations of motion of a n degree-of-freedom
robot
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Simulation ! given t(t) find q(t) by solving equations of
motion.n coupled, non-linear, second-order, ordinary differential
equations(ODEs).Cannot be solved analytically except for simplest
cases.Numerical solution of the ODEs Use of software such as Matlab
Rand in-built integration routine such as ODE45.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 43 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTION
Simulation ! given external torque/forces obtain motion of
robot.General form of equations of motion of a n degree-of-freedom
robot
t = [M(q)]q+C(q; _q)+G(q)+F(q; _q)
Simulation ! given t(t) find q(t) by solving equations of
motion.n coupled, non-linear, second-order, ordinary differential
equations(ODEs).Cannot be solved analytically except for simplest
cases.Numerical solution of the ODEs Use of software such as Matlab
Rand in-built integration routine such as ODE45.
ASHITAVA GHOSAL (IISC) ROBOTICS: ADVANCED CONCEPTS &
ANALYSIS NPTEL, 2010 43 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTIONInput to ODE45 (or other
routines) required to be in state-space form.Conversion to
state-space form(1) Mass matrix [M(q)] is invertible,
q= [M(q)]1 [tC(q; _q)G(q)F(q; _q)](2) Define X 22n (X1; :::;Xn)T
= (q1; :::;qn)T and(Xn+1; ::::;X2n)T = ( _q1; ::::; _qn)T .(3)
Rewrite n second-order ODEs as 2n first-order ODEs
_X1 = Xn+1; _X2 = Xn+2; :::; _Xn = X2n0BB@_Xn+1::_X2n
1CCA = [M(X)]1 [tC(X)G(X)F(X)] (34)State-space form of equations
of motion
_X= g(X;t) (35)
with initial conditions X(0).ASHITAVA GHOSAL (IISC) ROBOTICS:
ADVANCED CONCEPTS & ANALYSIS NPTEL, 2010 44 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MOTIONInput to ODE45 (or other
routines) required to be in state-space form.Conversion to
state-space form(1) Mass matrix [M(q)] is invertible,
q= [M(q)]1 [tC(q; _q)G(q)F(q; _q)](2) Define X 22n (X1; :::;Xn)T
= (q1; :::;qn)T and(Xn+1; ::::;X2n)T = ( _q1; ::::; _qn)T .(3)
Rewrite n second-order ODEs as 2n first-order ODEs
_X1 = Xn+1; _X2 = Xn+2; :::; _Xn = X2n0BB@_Xn+1::_X2n
1CCA = [M(X)]1 [tC(X)G(X)F(X)] (34)State-space form of equations
of motion
_X= g(X;t) (35)
with initial conditions X(0).ASHITAVA GHOSAL (IISC) ROBOTICS:
ADVANCED CONCEPTS & ANALYSIS NPTEL, 2010 44 / 74
-
. . . . . .
SIMULATION OF EQUATIONS OF MO