Embed Size (px)
DESCRIPTION
ModRED : A Modular Self-Reconfigurable Robot for Autonomous Exploration. Carl Nelson*, Khoa Chu*, Prithviraj (Raj) Dasgupta **, Zachary Ramaekers ** University of Nebraska *: Mechanical Engineering, University of Nebraska, Lincoln **: Computer Science, University of Nebraska, Omaha. - PowerPoint PPT Presentation
Citation preview

ModRED: A Modular Self-Reconfigurable Robot for Autonomous Exploration
Carl Nelson*, Khoa Chu*, Prithviraj (Raj) Dasgupta**, Zachary Ramaekers**University of Nebraska
*: Mechanical Engineering, University of Nebraska, Lincoln**: Computer Science, University of Nebraska, Omaha

IntroductionModular self-reconfigurable robots (MSRs) are robots
consisting of identical programmable modules capable of reconfiguration.
To enable long-term robotic support of space missions, MSRs needed for:unstructured environmentschanging tasksself-repair
MSR capabilities can result in savings in:timemoneylives

Design MotivationTypes of MSR
Mobile – CEBOT & S-botChain – CONRO, Polypod, & PolyBotLattice – Telecube, Molecule, & StochasticHybrid – Superbot & MTran II
Advanced chain-type MSRs have up to three degrees of freedom (DOF)
More tasks are possible with higher numbers of DOF

Existing MSRsFocusing on chain-
type (as opposed to lattice-type)
Desire light, small package with high task adaptability and dexterity
System Class DOFMotionSpace
YaMor chain 1 2-D
Tetrobot chain 1 3-D
PolyBot chain 13-D
Molecube chain 13-D
CONRO chain 23-D
Polypod chain 2 3-D
MTRAN II hybrid 2 3-D
Superbot hybrid 3 3-D

Design Motivation

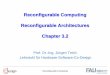
4-DOF Architecture

KinematicsToroidal position
workspace of onemodule end w.r.t.the other
Some embedded orientation workspace
1 2 3 1 3 1 2 3 1 3 1 2 1 2 4 3 1 4 3 1 3 2 1
1 2 3 1 3 1 2 3 1 3 1 2 1 2 4 3 1 4 3 1 3 2 1 105
2 3 2 3 2 2 4 3
( ) ( ) ( )( ) ( ) ( )
( )0 0 0 1
c c c s s c c s s c c s c c d s s d c s d P d ss c c c s s c s c c s s s c d s c d c c d P d c d
Ts c s s c s d s

Transmission2 motorsSolenoids (dis)engage DOF

Reconfiguration and LocomotionIntended to handle unstructured
environmentsNeeds to be able to form useful
configurations for task accomplishment as well as locomotion (multi-module or single-module)

Prototype System

Webots Robot Simulator: Simulated ModRED modulesAccurate models for environments, robots
Physics engine can be used to simulate external forcesSimulations in real or accelerated time

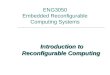
2-module Inchworm Gait Pattern Step 1: Initial configuration Step 2a: Raise rear joint of
posterior module Step 2b: Raise forward joint of
anterior module Step 2c: Extend posterior
module Step 3a: Lower connected
section Step 3b: Raise posterior rear
module and adjust angle Step4a: Lower posterior rear
module Step 4b: Raise connected section Step 4c: Contract posterior
module
Step 4d: Extend anterior module Step 5a: Lower connected
section Step 5b: Raise anterior front
module and adjust angle Step 6a: Lower anterior front
module Step 6b: Raise front joint of
anterior module Step 7a: Contract front module Step 7b: Lower rear joint of
posterior module Step 7c: Lower front joint of
anterior module
The series of steps that have to be done by 2 modules of ModRED:

2-module Inchworm Gait Pattern: Simulated on Webots
Currently the gaits of ModRED are configured by hand

Research Challenges in Designing Autonomous MSRsTo enable long-term robotic support of space missions,
MSRs can encounter:unstructured environmentschanging tasksself-repair
These require autonomous, dynamic reconfiguration among the modules
Issues involved:What is the best module or set of modules to pair
with?What is the best set of connections to have with
neighboring modules?

Operational Issues and Robot CapabilitiesDistributed – no shared memory or map of the
environment that the robots can use to know which portion of the environment is covered
Each ModRED module is frugal...limited storage and computation capabilitiesCan’t store map of the entire environment
Other challenges: Sensor and encoder noise, communication overhead, localizing robots
Learn from our research on multi-robot team formation to get directions for investigating these issues

Multi-robot Team Formation with Fixed Size Teams

Coverage with Multi-robot TeamsSquare
Corridor
Office
• Larger robot team sizes in environments with many obstacles reduces the efficiey of exploration• Lesson: Robot team sizes cannot remain fixed – must be adapted dynamically based on operation conditions

Dynamic Reconfigurations in ModREDHaving chains of modules is efficient for
explorationHaving large chains of modules doing frequent
reformations is inefficient for explorationCan we make the modules change their
configurations dynamicallyBased on their recent performance: If a large
chain is doing frequent reformations (and getting bad exploration efficiency), split the chain into smaller chain and see if exploration efficiency improves

Structured Way to Form Modules:Coalition GamesCoalition games provide a theory to divide a
set of players into smaller subsets or teamsWe have used a form of coalition games called
weighted voting games (WVG)

20
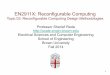
Layered Approach
Weighted Voting Game
Robot ControllerLayer
Mediator
Works with agent utility, agent strategies,
equilibrium points, etc.
Works with physical characteristics such
as wheel speed, sensor reading,
pose, etc.
Map from agent strategy to robot
action, sensor reading to agent
utility, maintain data structure for
mapping

Ongoing and Future WorkFurther develop the prototype of ModRED
Sensors, actuators, comms, processorAdapt the results from multi-robot team
formation to chain robot formation using ModRED
Terrain simulationTest hand-crafted and autonomous gait
patterns Testing motion algorithms in variety of
terrains on prototype ModRED

AcknowledgementsWe are grateful to NASA Nebraska Space
Grant Consortium for their continued support in this project
Students involvedZachary Ramaekers, UNOKhoa Chu, UNL
Supervising FacultyRaj Dasgupta, Computer Science, UNOCarl Nelson, Mechanical Engineering, UNL/
Dept. of Surgery, UNMC

Ke Cheng, UNO 23
Thank You!For more information:
Dr. Nelson’s lab at UNL: http://robots.unl.edu/Nelson/www/index.htm
Dr. Dasgupta’s lab at UNO: http://cmantic.unomaha.edu