Embed Size (px)
Citation preview

46 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-5, NO. 1, JANUARY 1975
Modern Control Concepts in HydrologyNGUYEN DUONG, C. BYRON WINN, AND GEAROLD R. JOHNSON
Abstract-Two approaches to an identification problem in hydrology many of the component processes in hydrology are non-are presented, based upon concepts from modern control and estimation linear [3] due to i) the time variability of watersheds duetheory. The first approach treats the identification of unknown parameters to the natural processes of weathering, erosion, climaticin a hydrologic system subject to noisy inputs as an adaptive linearstochastic control problem; the second approach alters the model equation changes, etc., ii) the uncertainty with respect to the statesto account for the random part in the inputs, and then uses a nonlinear and characteristics of the interior elements of the system inestimation scheme to estimate the unknown parameters. Both approaches time, and iii) the inherent nonlinearity of the processes ofuse state-space concepts. The identification schemes are sequential and mass and energy transfer that constitute the hydrologicadaptive and can handle either time-invariant or time-dependent param- cycle. Thus hydrologic rocesses can be considered aseters. They are used to identify parameters in the Prasad model of y yng d
rainfall-runoff. The results obtained are encouraging and confirm the nonlinear dynamic distributed-parameter systems withresults from two previous studies; the first using numerical integration of partially known or unknown structures operating in athe model equation along with a trial-and-error procedure, and the continuously changing environment. The inputs and outputssecond using a quasi-linearization technique. The proposed approaches of these systems are measurable, but the data obtained areoffer a systematic way of analyzing the rainfall-runoff process when the imbedded in noise again with partially known or unknowninput data are imbedded in noise. characteristics.
For a detailed study of hydrologic systems the math-INTRODUCTION ematical models developed should be nonlinear dynamic
1 ?VUCH OF THE insight gained in other fields, distributed-parameter models. At the present time, however,lvi especially in systems engineering, is directly applic- the assumption of space invariance is often unavoidable
able to hydrology [1]. Since modern control and estimation because of a lack of data on parameter distribution. Thetheory have been applied successfully to aerospace engineer- subdivision of large watersheds into environmental zones,
where environmental conditions that affect the behavioring problems (e.g., satellite tracking, orbit determination,space navigation, etc.) in the last two decades, and since of hydrologic systems can be assumed as uniform, and thethere are many similarities between these problems and the use of a lumped-parameter model for each zone is thenidentification of unknown parameters of hydrologic proces- required to improve the modeling situation. By routingses (i.e., the models are not known precisely, the system the flow spacewise through all the lumped-parameterunder study is stochastic and highly nonlinear, and there is models representing the environmental zones, the total
simulation of the entire watershed would represent annoise in the observations), the application of this approachto the study of hydrologic systems has been investigated. Lapproximtionttoadistribute-paramete system. nLumped-parameter models of hydrologic systems can beCharacteristics of Hydrologic Systems divided into deterministic and stochastic models. The
deterministic approach is often called parametric modeling.Ahydrologic systemmay bedefinedasaninterconnection The choice of the model is determined by the type of
of physical elements that are related to water in its natural- ~~~problem to be solved. Parametric models require inputstate. The essential feature of a hydrologic system lies in its data with considerable detail in time, therefore, they modelrole in generating outputs (i.e., runoff, etc.) from inputs transient responses well and are most widely used for short-(i.e., rainfall, snowmelt, temperature, etc.) or in interrelating term simulation or for prediction for water managementinputs and outputs. The stochastic nature of the inputs and purposes [1]. Stochastic models have the advantage ofoutputs of hydrologic systems has been discussed by
Yevjevich [2]. ~ ~~~~~~~taking into account the chance dependent nature of hydro-Yevjevch [2]. Ilogic events. Stochastic synthesis models are concernedHydrologic processes are complex time-varying dis-wihtesmlioofherainhpbtenipuad
tributed phenomena, which are controlled by an unknown output data (cross correlation models) and between suc-number of climatic and physiographic factors. The later cessiv vale ofe correlation models).descriptors tend to be static or to change slowly in relation In stochastic simulation models, statistical measures ofto the time scale of hydrologic fluctuations. Observations of hdologicviablesiar used t atefture events oresults in the laboratory and in the field also indicate that which probability levels are attached. However, in this
case long-term records, which in many instances are not
Manuscript received June 13, 1973; revised July 24, 1974. This work avial,aeneddt.siaete'aaeeso hwas supported by the National Aeronautics and Space Administration stochastic model in order to obtain a proper representationunder Contract NAS8-28655. of their stochastic nature. Stochastic simulation modelsN. Duong iS with the Vietnamese Air Force and the University of uulyaeue o lnigproe odvlpmn
Saigon, both in Saigon, Republic of South Vietnam. uulyaeue o lnigproe odvlpmnC. B. Winn and G. R. Johnson are both with the Mechanical Engi- ";equally likely" long-term traces of monthly streamfiow
neering Department and the University Computer Center, ColoradoState University, Fort Collins, Colo. 80521. 'or similar smoothly varying responses.

DUONG et al.: CONTROL IN HYDROLOGY 47
For dynamic systems that are well-characterized by finite- 2.0order ordinary differential equations (differential systems) 1.5
domain is to be preferred, the use of the state-space approach - - - |offers a great deal of convenience conceptually, notationally,and analytically. The study reported in this paper deals ° _with the applications of the state-variable approach frommodern control and estimation theory to the identificationof unknown parameters of nonlinear lumped-parameterresponse models of hydrologic systems subject to noisyinput-output data. The hydrologic system examined is the (,A ____rainfall-runoff process. 10.rSTATE-SPACE APPROACH FOR IDENTIFICATION OF NONLINEAR
HYDROLOGIC SYSTEMS FROM NOISY OBSERVATIONS
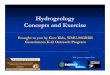
Techniques used in the past for the determination of theinstantaneous unit hydrograph and the identification ofunknown parameters in a conceptual model of a hydrologic 25.0process have not been adequate. This is because the input 20.0 i _.and output hydrologic data are imbedded in noise, the 15.0hydrologic processes are nonlinear, and the changing of 0loo l__llthe environmental conditions in time may affect the model _ _output. In this section a new approach for hydrological 5.0studies is investigated using state-space concepts. Techniques o.cX-for optimal adaptive identification of the unknown param- 0.00 0.05 0.10 0.15 0.20 0.25 0.30eters and of the control inputs for the rainfall-runoff process Qp ins./Hr.are presented. Fig. 1. Plots of ao, al, and bo versus Q, for Willscreek Basin.
Kulandaiswamy ModelDirect runoff may be considered as the result of the storage equation can now be written as
transformation of rainfall excess by a basin system. Thephysical process of this transformation is very complex, S = ao(Q)Q + al Q + b0U. (3)depending mainly upon the storage effects in the basin. dtKulandaiswamy [4] derived the following general ex- With the continuity equationpression for the storage
N ~ dnQ dmU -S = U(t - QT) (4)S= , a,(Q,U) + , bm(Q,U) dtm (1) dtn=O ~~dtn = t
the rainfall-runoff process can be represented by the follow-where S iS the storage, t iS the time, N and M are integers,indfertalquioand an(Q, U) and bm(Q, U) are parametric functions of the ing differential equationdirect runoff Q and the excess rainfall U. To apply (1) to the d2Q dQ dUstudy of the rainfall-runoff process in a particular watershed, al 2 + A(Q) + Q = U -bo- (5)the values of N and M must be determined. Both Q(t) dt dt dtand U(t) are available in the form of curves and differentia- wheretion has to be done by numerical approximation techniques. A(Q) = ao + QdaTaking into consideration the nature of the curves rep- dQresenting Q(t) and U(t) and the magnitude of error likelyto be introduced by numerical differentiation, the values A plot of Q versus A(Q) was made for various basins, andof N= 1 and M 0 were adopted by Kulandaiswamy. two types of regions could be differentiated. The systemFor this simplification, (1) reduces to equations for these regions are the following.
1) Nonlinear region:S = a0(Q,U)Q + a1(Q,U) .2Q + b0(Q,U)U. (2) atdt2Q+(1 Q dQ + -odU (6
Plots of a0, a1, and bo versus Qp, the peak discharge, for arepresentative watershed are illustrated in Fig. 1. Kul- 2) Linear region:andaiswamy found that a1 and bo vary from storm to stormbut do not show any well-defined trend in the variations, 1t d 2Q +2dQ dU=U- o (7)hence, he took these two parameters as constants [5]. The dt2 dt dt

48 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, JANUARY 1975
The general nonlinear storage equation (1) proposed by to the authors was related to Prasad's work, only the PrasadKulandaiswamy has been adopted by many hydrologists model will be used in the investigation of the performancein the simulation of the rainfall-runoff process by lumped- of the proposed identification schemes.parameter response models, but the approach used in thedetermination of the model parameters has been criticized Reformulation of Prasad Model in State Spaceby Eagleson [6]. Kulandaiswamy used characteristics of the Equation (9) can be written assurface runoff hydrograph at peak discharge (dQ/dt = 0), q
on the falling limb (U = 0), and on the rising limb up to the d2Q (I KNQN-1 dQ_ I Q + U.end of rainfall excess to get various plots of ao, a,, and dt2 \K2! dt VK2! K2!bo versus Qp and Q versus A(Q); then from these plots the (10)values ofa1, c1, m, bo, and c were determined. The evaluation The estimation of the unknown parameters K1, K2,of ao from a single discharge (the peak discharge) and a1,bo and N can be accomplished by applying a Kalman filteringfrom a portion of the surface runoff hydrograph should be algorithm to the augmented two-dimensional state vectorreplaced by some other method that can evaluate the model g gr ...........................and the observation model. Defining the followingcoefficients over the full range of observed discharges. transformations
Prasad Model X=Q X2=Q X3=K1 1X,=X2 0 X =Kl X4=- X5=NA simplification of the preceding model by retaining K2
only two terms of the general nonlinear storage equation (11)was proposed by Prasad [7]; in this case the storage and the assumption that the model coefficients are timeequation is invariant, (10) can be written in the following form
S = KQN + K2dQ (8) jXi r 1KQ Kdt IX2 X3x4x5X5 X2 + X4(U -X)
where K1, K2, and N are the parameters to be estimated. |X3| = 0| (12)In his study, Prasad assumed that K1, K2, and Nare constant 40for a particular hydrograph. Using the continuity equation, LXJ L Jthe following differential equation for the rainfall-runoff or, in abbreviated notation,process is obtained
QN21 dQ Q U. X(t) = f[X(t),R(t)]. (13)K2 d2Q + KINQNl dQ +t U. (9) Equation (13) is the model equation in state space. Let
Y(t) denote the measured runoff that is imbedded inComparing the Prasad model for nonlinear storage ((8)) with noise; one then hasthe Kulandaiswamy model defined by (3), one can recognize Xthat ao(Q) and a, have been taken as K'NQN-l and K2, 1X21respectively, and bo = 0. Y(t) = [I 0 0 0 0| X3 |+ D (14)
In the Prasad model, the time-invariant coefficients X4Kl, K2, and N were originally evaluated by a trial-and- Xserror method, which is computationally inefficient and o a t a
requires the knowledge of the initial conditions with or,i n abbreviated notation,sufficient accuracy. These coefficients were later computed Y(t) = h[X(t)] + v(t) (15)by Labadie [8] using quasi-linearization, which represented where v(t) represents the noise term.a significant improvement over the trial-and-error pro- The formulation of the estimation schemes for estimatingcedure but which has two main inherent weaknesses:i) initial approximations must be within, or at least close . pto, the convex region surrounding the optimal solution, or implemented for the study of the rainfall-runoff process.
convergence is not attained;.ii.if 'convergencedoes notThe data used were from the storm of April 10, 1953, overconvergence iS not attained; ii) if convergence does not .* ^ . ~~~~~~~~theSouth Fork of the Vermilion River Basin above Catlin,result for a particular set of initial approximations, it is t
no possibleto determine systematicallyabetter set ofIllinois. These data were selected in order to compare theinti aprox.to frm tesults. present state-space methods with the results from earlierinitial annroximations from these results.
These approaches for estimating the model coefficients studies using the same data set. All results presented werearsutbeol.o eemnitcmdl n r o obtained from computer programs written in Extended
suitable for the analysis of real input-output data where the Fortran for use on the Control Data Corporation 6400values to be used in the model are imbedded in partially digital computer at Colorado State University.known or unknown noise. The two methods proposedherein are very useful in solving parameter identification Adaptive Control Approachproblems for this case. Since the Prasad model for rainfall- An adaptive control algorithm for the estimation of therunoffis typically nonlinear, and the data set made available state variables and the unknown parameters of a time-

DUONG et al.: CONTROL IN HYDROLOGY 49
varying system with noisy data has been developed by ?0 .176Duong [9]. It is suitable for those cases where the error- 19 .168covariance matrix of the input disturbance is unknown.Basically, it consists of modeling the hydrologic system as 18 .160 8 Sof
an optimal stochastic control problem, applying the separa- 17 .152tion principle [10], using a Gauss-Markov process to model 16 .144the unknown parameters, and using an adaptive filtering v1vscheme to estimate the observation error covariance matrix 1536R and the process error covariance matrix Q. Survey papers 14 .128in this area were presented by Sage and Husa [11], Weiss 13 .120[12], and Mehra [13]. lThe matrices F(t) and G(t) in the linearized expression 12
of (12) have the following forms: 11 .104
0 1 0 0 01 10 #096 5I # ~~~~observation #observation
E1 -X3X4X5X ' -X2X4X5XX5?' E2 E3 1.20F(t)-OO0 0O0 1.18 -_0
0 0 0 0 0 1.16
0 0 0 0 0 _ 111.14
(16)1.12
where1.10
= -X2X3X4X5(X5 - 1)Xj-2-X4 1.08
E2 X5U-X - X2X3X5X' 1.06
E3 =-Xx X -l-X2X3X4XX5-X log (XI) 1.04
and 1.02
B(t) = [O X4 0 0 0]T. 1.00# observation
An error term e(t), used to model such effects as unknown Fig. 2. Estimation of time-invariant parameters by linear adaptivedynamics and truncation errors, was chosen to be a zero- control approach.mean white noise process with covariance matrix
O 01 l ~~~~~~pdated as soon as new values ofthe estimate were obtained.. The values of the time-invariant parameters in the model
0 = | O O | converged relatively quickly to their optimal estimateslfter only ten iterations, as shown in Fig. 2. The resulting
0] optimal estimates areThe observation noise covariance matrix has the form
R =0.0001. KI = 19.99 = 0.16 N = 1.18.K2R was taken to be much smaller than 0 because the observed Defining the same coefficients as those used by Labadieoutputs of the rainfall-runoff system were relatively noise-free compared to the inputs; also, there are errors in the [8] yieldsmodel equations due to the incomplete knowledge of the Al KIN = 3.77 A 0. 16 N = 1.18.nature of the system. K2 K2For this linear stochastic control problem, the state-
transition matrix (D must be computed carefully to avoid There values are not much different from those obtainedintroducing further errors into the model equations, there- by Prasad using a trial-and-error procedure and numericalfore, in the study second-order terms were also taken into integration of the nonlinear equation. Prasad obtained thethe computation of D. ,Since the state variables of the rain- values 3.79, 0.076, and 1.27, for At, A2, and N, respectively.fall-runoff system vary relatively slowly with time, the Labadie, using a quasi-linearization technique, obtainedinterval between two consecutive observations (one hour) is 4.473, 0.0943, and 1.27, respectively. The differences aresubdivided into only ten subintervals to avoid excessive mainly due to the noise terms introduced into the modelcomputational requirements, and the value of 'D is computed equations to make them more realistic and to conform withusing standard approximation formulas. the nature of the rainfall-runoff data.The control gains were computed first, based on nominal Values of the estimated surface runoff compared with
values of the state. Later, values of the control gains were observed runoff are shown in Fig. 3 with and without

50 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, JANUARY 1975
control of the input disturbance. From these results, thefollowing remarks can be made.
0. i) Adaptive control of the inputs is important for theanalysis of the rainfall-runoff process. Without controllingthe rainfall data, the system identification results are poor,
.01 therefore, the estimation of the surface runoff from thesenoisy inputs is unacceptable.
.0030 ii) Controlling the inputs requires little additional com-
.~ .0027 1 A_ with control | puter time. For the particular data set under study, with the. . o----o without control same initial conditions mentioned previously, only six
.0024 observed runoff seconds were needed in addition to the computer time usedby the Kalman filtering scheme, including the adaptive
.0021 estimation of the error-covariance matrices R and Q.
.0018 iii) Even with input-control procedures, the approxima-tion of a nonlinear system by linearized equations will not
- s.0015 provide good results if the system under study is highly1/ .> m nonlinear.
C; .0012 The effect of adaptive estimation of the model-error° .ooosl j m.\ | covariance matrix can be seen from Fig. 4. In this test
r_ .0009case, the Q matrix was
.0006
.0003 0 100 0 0
0. 011 2 3 4 5 10 15 20 25
# observati,on L _Fig. 3. Estimate of direct runoff with and without control.
Without adaptive estimation of the Q_ matrix at each state,the filter started to diverge at the twentieth observation.
Finally, the performance of the adaptive control algorithmwith and without rectification of the nominal state at eachstage is shown in Fig. 5 for comparison. As expected,
err. .O i rectification improves the filter performance.e adaptive est. of Q Nonlinear Estimation Approach
.0030 O--- ie 0err.observed runoff If the input noise characteristics are known, a nonlinear
.0027 estimation approach may be used to estimate the state andunknown parameters in a hydrologic system. This approach
.0024 - is simpler and provides faster convergence than the adaptivecontrol approach but does require knowledge of the input
.0021 - noise characteristics.
.0018 i Optimal estimation in the nonlinear case involves the|| \ ' solution of an infinite-dimensional process, as shown by
.0015 - Kushner [14]. Since the computational aspects of the truly
a 0012 L' toptimum nonlinear filter are prohibitive, several approachesC; .0012 - i l | to suboptimal filtering have been proposed in the past fewX .00 years (Friedland and Bernstein [15], Schwartz and Stear
[16], Athans et al. [17], Sage and Melsa [18]). These.0006- algorithms can be roughly subdivided into the so-called
first-order filters and higher-order filters with increasing.0003- Z l§complexity and computational requirements. In hydrology0. ~~because the estimate of the state of a system is usually
3 4 510 1 j ! q obsrvation | not required to be highly accurate only the extended (first-# bsrato order) Kalman filter iS considered here.z ~~~~Toimprove the performance of the extended Kalman
. ~~~~~~~~~~~filter,one can pursue the technique derived by DenhamFig. 4. Effect of adaptive estimation of model-error covariance and Pines [19] to reduce the effect of the measurement
matrix, function (h) nonlinearity, which occurs very often inhydrology when the output data from a hydrologic systemare imbedded in noise. This technique is a local iteration

DUONG et al.: CONTROL IN HYDROLOGY 51
algorithm based on relinearization about the new estimate. 0.This is described in detail in Duong [9] and the applicationto the Prasad equation is described. 4
The continuity equation may be written as ..0 - ~ , with rectification
dS = U - Q + w(t) (17) .0030 oO-o fixed normal state
dt observed runoff
.0027 -
where U* denotes the actual rainfall input data and w(t)represents the input noise which is assumed, as usual, to .0024 -
be a zero-mean white noise process with covariance matrix.0021 - 0
E[w(t)w(T)'] = Wb(t - T).= .0018 -
Combining this equation with the nonlinear storage akequation, one obtains .0015 -
dQ =_( K QN-1dQ + U(01)(U*-Q)00K2 ~ t 2 .0009
+( w. (18) .0006 - l
Let Xl = Q, X2 = Q, X3 = K1, X4 = 1/K2, X5 = N; .0003 -
then one obtains the following state equation: 0.1 2 3 4 5 10 15 20 25
XI X2 obse1rvation-|X4X3->X5XV5-1 X2 + X4(U* - XI) Fig. 5. Effect of rectification of nominal state.
X3 =0X4 0
[_5_0 ] 20 .176
1 19 .168x4
+ 0 W (19) 181 .1600 ~~~~~17 .152
The obervatin eqution i the sme as[~ jW 19) 1 .144or, in abbreviated notation, 16 .144
X = f(X(t),U*) + g((X(t),w(t)). (20) 14 .128The observation equation is the same as in the previous 13 .120section. 12The matrix of partial derivatives is .112
1 1 ~~~~~~~~.104° X2 0 0 0
X5-1 10 ~~~~~~~~~~~~~~~~~~~~~.096E1 -XX4Xsl S- -X2)XIX5XX5-' E E 0 5 10 15 20 25 0 5 10 15 20 25# observation # observationF(t)= 0 0 0 0 0 1.20
0 0 0 0 0 1.18
_0 0 0 0 0_ .6 t1.16
(21)1.14
where1.12
E= -X2X3X4X5(X5 -1)XIJ52 X4 1.10E2= U-X - X2X3X5Xl5-' 1.00E3= -X2X3X4Xj 5-(1( + X5 log (X1)). 1.06
Assume that the observation and input noise error 1 .04covariance matrices have the following values, respectively, 1.02
R = 0.001 W-=0.01 1.000 5 10 15 20 25
and the given initial conditions are the same as in the pre- . ..# observationexampe.Asshow in Fg. 6,the ptimu valus ofFig. 6. Estimation of time-invariant parameters by iterated extendedViOUS eape ssonl l.6 h plu auso Kalman filter.

52 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, JANUARY 1975
0. recently begun finding their way into civil systems, but it isanticipated that the major developments will be made in thecivil systems area during the next decade. This paper has
a .01 A a fixed presented the application of optimal estimation theory tofie err. identification problems in hydrological systems. The
.0030 o--- adaptive estimation oferr. methods presented here offer the following advantages
.0027 observed runoff I over previously used techniques: i) the state-space formula-tion of the problem provides a useful alternate procedure
.0024 /><_>,| g for parameter identification of the process under study; ii)the state-space formulation provides a systematic method
.0021 r y \ I f of analyzing the rainfall-runoff process; iii) the identifica-.0018 tion schemes presented are sequential and adaptive and can
.0018 13x handle data sets that may be imbedded in noise with un-
.0015 known characteristics; iv) the techniques may be applied
.0012 to stationary or nonstationary parameters; v) the com-
4.009 I putational requirements are quite insignificant.The adaptive control method may be used to investigate
{ X0 streamflow prediction for small watersheds using only thea .0006 1 measured runoff at the mouth of the watershed. In this case,
K< a 'dthe adaptive control method can be used to estimate the.0003 / J unknown precipitation inputs from measured runoff, and
0. good short-term streamflow prediction can be obtained by1 2 3 4 S 10 1S 20 j 1 25 | propagating the state and the estimation-error covariance
# observation matrix forward in time.It is anticipated that the techniques presented could be
_ applied to large watersheds by dividing the large watershedFig. 7. Estimate of direct runoff with and without adaptive estimation into environmental zones and using runoff observations
of model-error covariance matrix.of moe-rorcvracemto identify the unknown parameters. Routing models foradjacent zones could be incorporated into the system
- . ~~~~~~~~~~~~equations,and the use of the state variable approach wouldthe model parameters converge a little faster than the case elead to a matrix equation representing the response modelfor the entire watershed. Then, using total measured runoff,estimates are all unknown parameters in the various environmental zones
K1 = 19.998 -= 0.162 N= 1.182. and in the routing models could be estimated simultaneously.K2 REFERENCES
One would expect these results to be better than those [1] D. R. Dawdy, "Mathematic modeling in hydrology," The Pro-obtained previously, since in this case a nonlinear filter has gress ofHydrology, in Proc. Ist lnt. Sem. for Hydrology Professors,been used, therefore, model-error has been reduced. This [2] V. Yevjevich, "The structure of inputs and outputs of hydrologicfact is verified by a better comparison of the estimated systems," in Proc. 1st Bilateral United States-Japan Sem. Hydrol-
ogy, Jan. 1971.outflow to the measured outflow as presented in Fig. 7. [3] J. Amorcho and G. T. Orlob, "Nonlinear analysis of hydrologicSince the estimates of model coefficients converge to stable systems," Water Resources Center, Univ. Calif., Berkeley,contribution 40, 1961.values, one may conclude that these coefficients are constant [4] V. C. Kulandaiswamy, "A basic study of the rainfall excess surfaceor can be approximated by time-invariant parameters for a rOfunoff relationship in a basin system," Ph.D. dissertation, Univ.of Illinois, Urbana, 1964.particular hydrograph. [5] V. C. Kulandaiswamy and C. V. Subramanian, "A nonlinearThe effect of adaptive estimation of the model-error approach to runoff studies," presented at the Int. Hydrology
Symp., Fort Collins, Colo., Sept. 6-8, 1967.covariance matrix was also tested in this case. Using the [6] P. S. Eagleson, General Report, presented at Tech. Session 2, Int.same set pf initial conditions as previously used, the diver- Hydrology Symp., Fort Collins, Col., Sept. 6-8, 1967.[7] R. Prasad, "Nonlinear simulation of a regional hydrologicgence of the filter was less rapid than in the adaptive control system," Ph.D. dissertation, Univ. of Illinois, Urbana, 1967approach. The result is also shown in Fig. 7. [8] J. Labadie, "Optimal identification of nonlinear hydrologic-* system response models by quasi-linearization," M.S. thesis,
- ~~~~~~~~~~~~~~~~~~~Univ.of California, Los Angeles, 1968.; ~~~~CONCLUSIONS [9] N. Duong, "Modern control concepts in hydrology," Ph.D.
; ~~~~~~~~~~~~~~~~~~dissertation,Dep. Mechanical Engineering, Colorado State Univ.,The methods of systems analysis have been applied Fort Collins, 1973.
.. . . ~~~~~~~~~[10]H. W. Sorenson, "Controllability and observability of linear,extensively to military, aerospace, and industrial systems stochastic, time-discrete control systems," Advan. Contr. Syst.,in the past. The development of these methods and the Theory Appl., vol. 6, pp. 75-158, 1968.
.. . . ~~~~~[11]A. P. Sage and G. W. Husa, "Algorithms for sequential adaptiveapplications began with the military requirements in the estimation of prior statistics," in Proc. 8th IEEE Symp. AdaptiveSecond World War and then were expanded significantly Processes, 1969.
# . . . ~~~~~~~~~~~~~[12]I. M. Weiss, "A survey of discrete Kalman-Bucy filtering withInto the aerospace and industrial fields. They have JUSt unknown noise covariances," presented at the AIAA Guidance,

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-5, NO. 1, JANUARY 1975 53
Control, and Flight Mechanics Conf, Santa Barbara, Calif., 70-p several nonlinear filters," IEEE Trans. Automat. Contr. vol.995, 1970. AC-13, pp. 83-86, Feb. 1968.
[13] R. K. Mehra, "Approaches to adaptive, filtering," IEEE Trans. [17] M. Athans, R. P. Wishner, and A. Bertolini, "Suboptimal stateAutomat. Contr. (short papers), vol. AC-17, pp. 693-698, Oct. estimation for continuous-time nonlinear system from discrete1972. noisy measurements," IEEh Trans. Automat. Contr., vol. AC-13,
[14] H. J. Kushner, "Dynamical equations for optimum nonlinear pp. 504-514, Oct. 1968.filtering," J. Differential Equations, vol. 3, pp. 179-190, 1967. [18] A. P. Sage and J. L. Melsa, Estimation Theory with Application to
[15] B. Friedland and I. Bernstein, "Estimation of the state of a non- Communications and Control. New York: McGraw-Hill, 1971.linear process in the presence of non-Gaussian noise and distur- [19] W. F. Denham and S. Pines, "Sequential estimation when mea-bances," J. Franklin Inst. vol. 281, pp. 455-480, 1966. surement function nonlinearity is comparable to error," AIAA J.,
[16] L. Schwartz and E. B. Stear, "A computational comparison of vol. 4, pp. 1071-1076, 1966.



























![[hydrology] groundwater hydrology - david k. todd (2005).pdf](https://img.pdfslide.us/doc/110x75/577c77961a28abe0548cb0b1/hydrology-groundwater-hydrology-david-k-todd-2005pdf.jpg)
