Embed Size (px)
Citation preview

Modelling Non-linear and Non-stationary TimeSeries
Chapter 7(extra):(Generalized) Hidden Markov Models
Henrik Madsen
Lecture Notes
September 2016
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 1 / 15

Hidden Markov ModelFirst Order Markov Property
p(Xt|Xt−1) = p(Xt|X (t−1)), t ∈ N (1)
p(Yt|Xt) = p(Yt|X (t),Y(t−1)), t ∈ N (2)
X1 X2 X3 X4
Y1 Y2 Y3 Y4
Figure : Directed graph of basic HMM. The index denotes time.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 2 / 15

Markov Chains
Discrete state vector at time t, Xt, with m states.
Transition probabilityp(Xt = j|Xt−s = i) (3)
One-step transition probability
γij,t = p(Xt = j|Xt−1 = i) (4)
One-step transition probability matrix from time t − 1 to t
Γt =
γ11,t · · · γ1m,t...
. . ....
γm1,t · · · γmm,t
(5)
where the rows must sum to 1.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 3 / 15

Generalized State Space Models (GSSM)
Parameter driven - model evolve independently of the pastobservation process.
p(yt|xt) = p(yt|xt,X (t−1),Y(t−1)
)(6a)
p(xt+1|xt) = p(xt+1|xt,X (t−1),Y(t)
)(6b)
Observation driven - model depends on the past observationprocess.
p(yt|xt) = p(yt|xt,X (t−1),Y(t−1)
)(7a)
p(xt+1|Y(t)
)= p
(xt+1|xt,X (t−1),Y(t)
)(7b)
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 4 / 15

Model ValidationLikelihood Setting
Forward SelectionMaximum of 5 states and model chosen by AIC
AIC = −2L+ 2p (8)
Forecast Pseudo Residuals
zt = Φ−1 (p (Yt ≤ yt|Y(t−1)))
(9)
Marginal distribution
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 5 / 15

DataIC-Meter
Table : 5-Minute Variables.
Dataset Feature (type) Unit Description
Indoor-Minutes Datetime Date and time
Indoor-Minutes Temperature In ◦C Indoor temperature
Indoor-Minutes Humidity In % Indoor humidity
Indoor-Minutes CO2 In ppm Indoor CO2 content
Indoor-Minutes Noise Avg DB Average noise level (5 min)
Indoor-Minutes Noise Peak DB Largest average of 3 subse-quent measurement (15 secper measurement)
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 6 / 15

Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Homogen HMMOriginal Scale
Setting
yt = CO2,t
p(xt|xt−1) ∼ Γ
p(yt|xt) ∼ N(µi, σ
2i)
for i = 1, 2, · · · ,m
Results
Table : Comparison of univariate homogen HMMs for 2 to 5 states.
L p AIC BIC2 states -97903 6 195818 1958643 states -91239 12 182502 1825954 states -87492 20 175023 1751785 states -83968 30 167995 168227
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Homogen HMMOriginal Scale
Table : Fit of the HMM (CO2) with 5 states.
δi µi σi γi1 γi2 γi3 γi4 γi5
State 1 0.21 410.79 6.88 0.99 0.01 0.01 0.00 0.00State 2 0.18 432.00 7.42 0.02 0.94 0.04 0.00 0.00State 3 0.20 477.92 24.17 0.00 0.05 0.90 0.05 0.00State 4 0.23 618.45 68.26 0.00 0.00 0.05 0.92 0.03State 5 0.18 1013.61 267.72 0.00 0.00 0.00 0.04 0.96
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

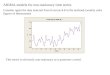
Figure : Global Decoding of the HMM (CO2) with 5 states. Top is the entire time series. Bottom iszoomed in on one day. Vertical lines indicate 00:00. Horizontal lines indicate the state dependentmean.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Figure : Fit of the HMM (CO2) with 5 states.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Homogen HMMTransformed Scale
h(y) = log(y− 350)
Setting
yt = h(CO2,t)
p(xt|xt−1) ∼ Γ
p(yt|xt) ∼ N(µi, σ
2i)
for i = 1, 2, · · · ,m
Results
Table : Comparison of univariate (log transformed CO2) homogen HMMs for 2 to 5states.
L p AIC BIC2 states -9378 6 18768 188143 states -4292 12 8609 87014 states -800 20 1640 17955 states 2181 30 -4303 -4071
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Figure : Fit of the HMM (log CO2) with 5 states.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Generalized FormHierarchical Model
p(yt|xt,θ)
p(xt+1|xt,θ
)Hierarchical model by random effects
Y|(U = u) ∼ fY|u(y; u,β
)(10a)
U ∼ fU(u;Ψ
)(10b)
The likelihood is given by
L(β,Ψ; y, u
)= f
(y;θ
)= f
(y, u;β,Ψ
)= fY|u
(y; u,β
)fU
(u;Ψ
)(11)
The distribution f(y, u;β,Ψ
)is given by an exponential dispersion model with density
given by Equation (??) with canonical link η = h(µ).The random effect is given by fU
(u;Ψ
)and the conditional likelihood by fY|u
(y; u,β
).
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Transition Probability Matrix with Covariates
Γt =
exp(XT
D,tβ11 + ZU11)
exp(XTD,tβ11 + ZU11) +
∑j6=1 exp(τ1j)
· · ·exp(τ1m)
exp(XTD,tβ11 + ZU11) +
∑j6=1 exp(τ1j)
.... . .
...exp(τm1)
exp(XTD,tβmm + ZUmm) +
∑j6=m exp(τmj)
· · ·exp(XT
D,tβmm + ZUmm)
exp(XTD,tβmm + ZUmm) +
∑j6=m exp(τmj)
(12)
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Figure : Periodic Splines. The knots are indicated on the x-axis.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Inhomogen HMMTransformed Scale
Setting
yt = h(CO2,t)
p(xt|xt−1) ∼ Γt
p(yt|xt) ∼ N(µi, σ
2i)
for i = 1, 2, · · · ,m
Results
Table : Comparison of univariate (log transformed CO2) inhomogen HMMs for 2 to 5states.
L p AIC BIC2 states -9319 14 18667 187753 states -4229 24 8506 86924 states -742 36 1556 18355 states 2258 50 -4417 -4030
Same trend in residuals - not appropriate
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 7 / 15

Markov Switching AR(1)
p(xt+1|xt) = p(xt+1|xt,X (t−1),Y(t)
)(13a)
p(yt|xt, yt−1) = p(yt|xt,X (t−1),Y(t−1)
)(13b)
Xt−1 Xt Xt+1 Xt+2
Yt−1 Yt Yt+1 Yt+2
Figure : Directed graph of Markov switching AR(1).
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 8 / 15

Inhomogen Markov Switching AR(1)Transformed Scale
Setting
yt = h(CO2,t)
p(xt|xt−1) ∼ Γt
p(yt|xt, yt−1) ∼ N(ci + φiyt−1 , σ
2i)
for i = 1, 2, · · · ,m
Results
Table : Comparison of univariate (log transformed CO2) inhomogen AR(1) for 2 to 5states.
L p AIC BIC2 states 15845 16 -31659 -315353 states 16204* 27 -32354 -321454 states 16964 40 -33848 -335385 states 17336 55 -34561 -34136
Residuals - appropriate for 4 and 5 state model!!
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 9 / 15

Final Model - 5 statesResiduals
Figure : Model diagnostics of the final model.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 10 / 15

Final ModelMarginal Distribution
Figure : Comparison of the distribution of the measured CO2 and the simulated distribution.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 11 / 15

Final ModelInterpretation of the states
State 1: Absence or sleepingState 2: Long term absenceState 3: Outdoor interactionState 4: Presence (high activity)State 5: Presence (long term, low activity)
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 12 / 15

Figure : Transition probabilities over the day of the final model. The lower right plot isthe stationary distribution.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 13 / 15

Figure : Profile of the states over the course of the day. I.e. Stackedstationary probabilities over the course of the day of the final model.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 14 / 15

Figure : Global Decoding of the final model. Top is the entire time series. Bottom iszoomed in on one day. Vertical lines indicate 00:00. Horizontal lines indicate the statedependent mean.
Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September 2016 15 / 15