Embed Size (px)
Citation preview

Mp
Ya
b
c
a
ARRAA
KCFSV
1
a1tf1eptKmoso1Ktia
C
T
0d
Computers and Chemical Engineering 34 (2010) 976–984
Contents lists available at ScienceDirect
Computers and Chemical Engineering
journa l homepage: www.e lsev ier .com/ locate /compchemeng
odelling and simulation of a continuous process with feedback control andulse feeding�
uan Tiana,b,∗, Lansun Chena, Andrzej Kasperski c
School of Mathematical Science, Dalian University of Technology, Dalian 116024, People’s Republic of ChinaSchool of Information Engineering, Dalian University, Dalian 116622, People’s Republic of ChinaFaculty of Mathematics, Computer Science and Econometrics, Bioinformatics Factory, University of Zielona Gora, Szafrana 4a, 65-516 Zielona Gora, Poland
r t i c l e i n f o
rticle history:eceived 8 May 2009eceived in revised form 31 August 2009
a b s t r a c t
This paper deals with feedback control of a microorganism continuous culture process with pulse dosagesupply of substrate and removal of products. By the analysis of the dynamic properties and numericalsimulation of the continuous process, the conditions are obtained for the existence and stability of positive
ccepted 8 September 2009vailable online 16 September 2009
eywords:ontinuous cultureeedback control
period-1 solution of the system. It is also pointed out that there does not exist positive period-2 solution.The results simplify the choice of suitable operating conditions for continuous culture systems. It alsogives the complete expression of the period of the positive period-1 solution, which provides the precisefeeding period for a regularly continuous culture system to achieve the same stable output as a continuousculture system with feedback control in the same production environment.
© 2009 Elsevier Ltd. All rights reserved.
tate impulsiveariable biomass yield. Introduction
Microorganisms play very important roles in nature and theirctivities have numerous industrial applications (see Rehm & Reed,981; Schugerl, 1987). In microbial as well as chemical processes,hree different modes of operation, batch (Luedeking & Piret, 1959),ed-batch (Yammane & Shimizu, 1984) and continuous (Monod,950) have been applied. The batch process is most simple andasily carried out in industry production, while the continuousrocesses have been widely used to culture microbes for indus-rial and research purposes (see Hsu, Hubbell, & Waltman, 1977;ubitschek, 1970). With respect to the microorganisms environ-ent, the fed-batch process falls between batch and continuous
perations (Yammane & Shimizu, 1984). In continuous cultureystems, “turbidostat” and “chemostat” are two well-adopted lab-ratory apparatus (Buler, Hsu, & Waltman, 1985; Chen & Chen,993; DeLeenheer & Smith, 2003; De Leenheer, Levin, Sontag, &
lausmeier, 2006; Gouze & Robledo, 2005; Sun & Chen, 2007). In aurbidostat, fresh medium is delivered only when the microorgan-sm concentration of the culture reaches some predetermined level,s measured by the biomass indicator. At this point, fresh medium
� This research is supported in part by National Natural Science Foundation ofhina (10771179).∗ Corresponding author at: School of Mathematical Science, Dalian University of
echnology, Linggong Road 2#, Dalian 116024, People’s Republic of China.E-mail address: [email protected] (Y. Tian).
098-1354/$ – see front matter © 2009 Elsevier Ltd. All rights reserved.oi:10.1016/j.compchemeng.2009.09.002
is added to the culture and an equal volume of culture is removed.In a chemostat, the medium is delivered at a constant rate by aperistaltic pump or solenoid gate system, which ultimately deter-mines the growth rate and microorganism concentration. The rateof media flow can be adjusted, and is often set at approximately20% of culture volume per day (Kubitschek, 1970). A truly contin-uous culture will have the medium delivered at a constant volumeper unit time. However, according to the researchers and chemicalengineers’ experience pumps or solenoid gates used in industrialscale systems are inherently unreliable. For that reason it is dif-ficult to adjust such production devices to deliver equal amountsof the medium to several cultures simultaneously. This way of themedium delivery is needed, if competition bioprocesses carried outin industrial scale are to be truly replicated. In order to solve thedifficulty of delivering exactly the same amounts of medium to sev-eral cultures growing at once, a “practically” continuous approachcan be taken. “Practically” means that, even if the flow is of pulsetype, but if the frequency of impulses is high enough (as comparedwith the inertia of metabolic processes), the flow is still consideredto be continuous, although in reality it is impulsive (Bailey & Ollis,1986). To our best knowledge, there is no result on the microbialprocess with pulse dosage of substrate and pulse washout of partof bioreactor medium.
On the other hand, systems with sudden perturbations areinvolving in impulsive differential equations. Authors, in (Liu &Chen, 2003; Sun & Chen, 2008; Tang & Chen, 2002; Tang & Chen,2004a), introduced some impulsive differential equations in pop-ulation dynamics and obtained some interest results. The research

mical
oialLdhpCitomtb
bMfbobocbtoitscm
utttatatocsfipspSitw
2
M21
�
a&&
Y. Tian et al. / Computers and Che
n the chemostat model with impulsive perturbations was stud-ed by Sun and Chen (2007). Tang and Chen (2004b) introducedLotka–Voterra model with state-dependent impulsion and ana-
yzed the existence and stability of positive period-1 solution. Jiang,u, and Qian (2007a) and Smith (2001) have studied the state-ependent models with impulsive state control, where the modelas a first integral, and obtained the complete expression of theeriod of the periodic solution. Jiang, Lu, and Qian (2007b) and Zeng,hen, and Sun (2006) have also discussed the models concerning
ntegrated pest management (IPM), which have no explicit solu-ion, by applying the Poincare principle and Poincare–Bendixsonf the impulsive differential equation, respectively. However, theajority of the known results are just related to the systems with
ime-dependent impulsion. Few papers have discussed the micro-ial process using impulsive differential equation.
According to carried out processes it is possible to receive highiomass yield by dosing the substrate in portions (Kasperski &iskiewicz, 2008). Moreover, it is easy to prevent the process
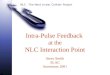
rom the decrease of dissolved oxygen concentration (DOC) in theioreactor medium below a low level by the monitoring of DOCscillations. It is necessary because the low level of DOC decreasesiomass yield and specific growth rate (Kasperski, 2008). On thether hand, with the growth of the microorganism and its con-entration increasing in the bioreactor, the effect of inhibitionetween the production and other negative effect will occur whenhe biomass concentration reaches a critical value. For the purposef continuously culturing the microorganism and decreasing thenhibition effect and the Crabtree effect, it is necessary to keephe biomass concentration lower than a certain level and dose theubstrate into the bioreactor in portions. Thus, in this paper, weonsider a microorganism continuous culture system, the sketchap of the apparatus can be seen in Fig. 1.The apparatus includes an optical sensing device which contin-
ously monitors the biomass concentration in the bioreactor andwo switches controlled by a computer. When the biomass concen-ration is lower a critical level, the switches are closed. In this casehe biomass is increasing by consuming the substrate in the biore-ctor. Once the biomass concentration reaches the critical level,wo switches are opened, part of the medium containing biomassnd substrate is discharged from the bioreactor, and the next por-ion of medium of a given substrate concentration is input. The restf this paper is organized as follows. In Section 2 we introduce aontinuous culture model with variable biomass yield and impul-ive state feedback control. In Section 3, we obtain the conditionsor the existence of positive period-1 solution by using the analyt-cal method. We also give the complete expression of the period oferiod-1 solution. In addition, we show that no positive period-2olution exists. Next in Section 4, we analyze the stability of theositive period-1 solutions by analogue of the Poincar criterion. Inection 5, we give the numerical simulations to verify the theoret-cal results, such as the existence of period-1 solutions, obtained inhis paper and discuss the biological essence. Finally in Section 6e present the conclusions.
. Model formulation and preliminaries
If the microorganisms’ growth proceeds in accordance withonod’s kinetics model (see Alvarez-Ramirez, Alvarez, & Velasco,
009; Lobry, Flandrois, Carret, & Pavemonod’s, 1992; Rehm & Reed,981; Schugerl & Bellgardt, 2000), i.e. according to dependence:
� S
(S) = maxKS + S
nd the linearly dependent YX/S = a + bS (a > 0, b ≥ 0) (see CrookeTanner, 1982; Crooke, Wel, & Tanner, 1980; Huang, 1990; PilyuginWaltman, 2003) is assumed, then the following mathematical
Engineering 34 (2010) 976–984 977
model works for a single species growing in a continuously stirredhomogeneous bioreactor⎧⎪⎪⎪⎨⎪⎪⎪⎩
dX
dt= �maxS
KS + SX
dS
dt= − 1
a + bS
�maxS
KS + SX
X(0+) = X0, S(0+) = S0
(1)
where X = X(t) denotes the biomass concentration and S = S(t)the substrate concentration in the bioreactor medium at time t,X0 and S0 denote the initial biomass concentration and substrateconcentration in the bioreactor medium respectively, �max is themaximum specific growth rate, KS , the saturation constant, a, b, thecoefficients of the variable biomass yield.
According to the design ideas of the bioreactor, the biomassconcentration should be controlled to a certain level. When thebiomass concentration X(t) in the bioreactor reaches the criticallevel XT , then part of the medium containing biomass and substrateis discharged from the bioreactor, and the next portion of mediumof a given substrate concentration is input impulsively. Therefore,(1) can be modified as follows by introducing the impulsive statefeedback control:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
dX
dt= �maxSX
KS + S
dS
dt= − 1
a + bS.�maxSX
KS + S
⎫⎪⎬⎪⎭ X < XT
�X = −Wf X
�S = Wf (SF − S)
}X = XT
X(0+) = X0, S(0+) = S0
(2)
where, SF is the concentration of the feed substrate which isinput impulsively, and 0 < Wf < 1 is the part of biomass whichis removed from the bioreactor in each biomass oscillation cycle.
In the following, we mainly discuss the existence and stability ofperiodic solution of system (2). Before introducing the main results,we give the Analogue of Poincar criterion first.
Theorem 1. (Bainov & Simeonov, 1993) (Analogue of Poincare’ Cri-terion) The T-periodic solution S = �(t), X = �(t) of system{
dX
dt= P(S, X),
dS
dt= R(S, X), if �(S, X) /= 0
�X = ˛(S, X), �S = ˇ(S, X), if �(S, X) = 0(3)
is orbitally asymptotically stable and enjoys the property of asymp-totic phase if the multiplier �2 satisfies the condition |�2| < 1 and isunstable if |�2| > 1. Where
�2 =q∏
k=1
�k exp
⎛⎝ T∫
0
[∂P
∂X(�(t), �(t)) + ∂R
∂S(�(t), �(t))
]dt
⎞⎠ ,
�k = P+((∂ˇ/∂S)(∂�/∂X) − (∂ˇ/∂X)(∂�/∂S) + (∂�/∂X))P(∂�/∂X) + R(∂�/∂S)
+R+
((∂˛/∂X)(∂�/∂S) − (∂˛∂S)(∂�/∂X) + (∂�/∂S)
)P(∂�/∂X) + R(∂�/∂S)
,
P+ = P(�(�+k
), �(�+k
)), R+ = R(�(�+k
), �(�+k
)) and P, R, ∂˛/∂X, ∂˛/∂S, ∂ˇ/∂X, ∂ˇ/∂S, ∂�/∂X, ∂�/∂S are calculated at the point(�(�k), �(�k)) and q is the order of the periodic solution.
3. Existence of positive periodic solution of system (2)
In this section, we mainly discuss the existence of periodic solu-tion of system (2) by the analytic method. Before discussing the

978 Y. Tian et al. / Computers and Chemical Engineering 34 (2010) 976–984
am of
pc
T
X
Tkaetttmac
(
Fa
Fig. 1. Schematic diagr
eriodic solution of system (2), we should consider the qualitativeharacteristics of system (1). By (1) we have
dX
dS= −a − bS.
herefore,
(X0, S0, S) = −aS − bS2
2+ X0 + aS0 + bS2
02
. (4)
he vector graph of system (1) can be seen in Fig. 2, from which wenow that in the process the substrate concentration S is decreasingnd the biomass concentration is increasing. If we do not adoptfficient control strategy, the microorganisms will finally consumehe substrate and cause the whole process terminated. In ordero not interrupt the culturing process and gain a stable output ofhe microorganism X , we need to discharge part of the bioreactor
edium containing biomass and substrate, and add the medium of
given substrate concentration to the bioreactor when the biomassoncentration reaches the critical level XT .Let S = �(t), X = �(t) be a T-period-1 solution of system2). Denote �0 = �(t+
0 ), �0 = �(t+0 ), �1 = �(t0 + T) = XT , �1 = �(t0 +
ig. 2. Illustration of vector graph of system (1) when a = 0.5, b = 0.025, �max = 0.3nd KS = 2.
the analyzed process.
T), �+1 = �((t0 + T)+) and �+
1 = �((t0 + T)+). Then by the T-periodicity, we have
�+1 = �((t0 + T)+) = �(t+
0 ) = �0, �+1 = �((t0 + T)+) = �(t+
0 ) = �0.
Then
�0 − �1 = �((t0 + T)+) − �(t0 + T) = −Wf �(t0 + T) = −Wf �1 = −Wf XT ,
�0 − �1 = �((t0 + T)+) − �(t0 + T) = Wf (SF − �(t0 + T)) = Wf (SF − �1).
Therefore,
�0 = (1 − Wf )XT , �0 = Wf SF + (1 − Wf )�1. (5)
Similarly, let S = �̄(t), X = �̄(t) be a periodic-2 solution of sys-tem (2). Denote �̄0 = �̄(t+
0 ), �̄0 = �̄(t+0 ), t0 < t1 < t0 + T, �̄1 =
�̄(t1) = XT , �̄1 = �̄(t1), �̄+1 = �̄(t+
1 ), �̄+1 = �̄(t+
1 ), �̄2 = �̄(t0 + T) =XT , �̄2 = �̄(t0 + T), �̄+
2 = �̄((t0 + T)+) and �̄+2 = �̄((t0 + T)+). Then by
the T-periodicity, we have
�̄+2 = �̄((t0 + T)+) = �̄(t+
0 ) = �̄0, �̄+2 = �̄((t0 + T)+) = �̄(t+
0 ) = �̄0.
Therefore,
�̄0 = (1 − Wf )XT , �̄0 = Wf SF + (1 − Wf )�̄2,
�̄+1 = (1 − Wf )XT , �̄+
1 = Wf SF + (1 − Wf )�̄1.(6)
3.1. Case 1. b = 0
In this case, system (2) is simplified into the following form:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
dX
dt= �maxSX
KS + S
dS
dt= −1
a.�maxSX
KS + S
⎫⎪⎬⎪⎭ X < XT
�S = Wf (SF − S)
�X = −Wf X
}X = XT
X(0+) = X0, S(0+) = S0
(7)
3.1.1. Period-1 solution
Theorem 2. If the critical level XT and the feeding substrate concen-tration SF satisfy the condition XT < aSF , then system (7) has a uniqueperiodic-1 solution with aS0 + X0 ≥ XT .

mical
3
Ts
d
a
S
Ttw
T(
T
3
T
3
3
i
Ub
T
p
s
3
oo
d
a
X
w�
e
Y. Tian et al. / Computers and Che
.1.2. Expression of the period T of the period-1 solutionIn this subsection we will give a complete expression of period
of periodic solution (�(t), �(t)). It follows by the first equation ofystem (7) we have
t = KS + S
�maxSXdX, (8)
nd S(X) can be determined by the following equation
(t) = SF − X(t)a
. (9)
hen travelling along S(X) from the point P0(�0, (1 − Wf )XT ), with= t|P0 , to the point P1(�1, XT ), with t = t|P1 , in the counterclock-ise direction yields
T = tP1 − tP0 =∫ XT
(1−Wf )XT
KS + SF − X/a
�max(SF − X/a)XdX
=∫ XT
(1−Wf )XT
[KS
�maxSF
[1
aSF − X+ 1
X
]+ 1
�max
1X
]dX
= KS
�maxSFln
(aSF − (1 − Wf )XT
aSF − XT
)−(
KS
�maxSF+ 1
�max
)ln(1 − Wf ).
(10)
The above result can be summarized in Theorem 3.
heorem 3. The period T of periodic solution (�(t), �(t)) of system7) satisfies equation
= KS
�maxSFln
(aSF − (1 − Wf )XT
aSF − XT
)− SF + KS
�maxSFln(1 − Wf ). (11)
.1.3. Period-2 solution
heorem 4. There does not exist period-2 solution in system (7).
.2. Case 2. b > 0
.2.1. Period-1 solutionFirst, we give three variables which are commonly used
n the following. Let D = a/b(1 − Wf ), u = aSF + bWf (SF )2/2 and
= u + (a − b(1 − Wf )SF )2/2b(2 − Wf ). Denote I(X, S) = X + aS +S2/2. We have the following result.
heorem 5. (i) If one of the following two conditions holds:(1) XT < u; (2) SF > D and XT = U. Then system (2) has a unique
eriod-1 solution with I(X0, S0) ≥ XT ;(ii) If SF > D and u ≤ XT < U. Then system (2) has two period-1
olutions with I(X0, S0) ≥ XT .
.2.2. Expression of period T of the period-1 solutionIn this subsection we will give a complete expression of period T
f periodic solution (�(t), �(t)). It follows from the second equationf (2) that
t = − (a + bS)(KS + S)�maxSX
dS, (12)
nd X(S) can be determined by the following equation
b 2 k b k 2
(S) = −aS −2S + a�0 +
2(�0) + (1 − Wf )XT , (13)
here �k0 = Wf SF + (1 − D)�k
1 = Wf SF + (1 − Wf )ϕk(XT ) =k(XT ), k = 1, 2 and �k
1 is determined by Eq. (33). Then trav-lling along X(S) from the point Pk
0(�k0, (1 − Wf )XT ), with t = t|Pk
0,
Engineering 34 (2010) 976–984 979
to the point Pk1(�k
1, XT ), with t = t|Pk1, in the counterclockwise
direction yields
Tk = t|Pk1
− t|Pk0
= −∫ �k
1
�k0
(a + bS)(KS + S)�maxSX(S)dS
=∫ �k(XT )
ϕk(XT )
(a + bS)(KS + S)�maxSX(S)dS
.
(14)
The above result can be summarized in Theorem 6.
Theorem 6. The period T of periodic solution (�(t), �(t)) of system(2) satisfies equation
Tk =∫ �k(XT )
ϕk(XT )
(a + bS)(KS + S)�maxSX(S)dS
, (15)
where ϕk(XT ) is determined by Eq. (33) and �k(XT ) = Wf SF + (1 −Wf )ϕk(XT ), k = 1, 2.
3.2.3. Period-2 solution
Theorem 7. There does not exist period-2 solution in system (2).
4. Asymptotic behavior of the period-1 solution
According to the definitions of orbitally asymptotically stableand enjoys the property of asymptotic phase (Bainov & Simeonov,1993), the following Theorems hold true.
Theorem 8. If XT < aSF , then the T-periodic solution (�(t), �(t)) ofsystem (7) is orbitally asymptotically stable and enjoys the propertyof asymptotic phase.
Theorem 9. (1) If XT < u, then the T-periodic solution (�(t), �(t))of system (2) is orbitally asymptotically stable and enjoys the propertyof asymptotic phase;
(2) If SF > D and u ≤ XT < U, then one T-periodic solution(�(t), �(t)) of system (2) is orbitally asymptotically stable and enjoysthe property of asymptotic phase, while the other is not stable;
(3) If SF > D and XT = U, then the stability of the T-periodic solu-tion (�(t), �(t)) of system (2) can not be determined by the theorem ofBainov and Simeonov.
5. Discussions and numerical simulations
We have analyzed theoretically the feedback control of microor-ganism continuous culture process for pule dosage supply ofsubstrates and removal of products. The results are new and signif-icant, which not only provide the possibility of a check of systemdynamic property including the existence and stability of period-1 solution for different microorganisms and several parameters,but also the possibility of a calculation of the period of the period-1 solution. Moreover, the results provide a possibility of makingsimulation of real process according to the mathematical modelsdetermined in the article. In order to verify the received results, wewill give the numerical simulations of systems (2). We will analyzethe existence and stability of period-1 solution by changing onemain parameter (i.e., XT , SF , X0) and fixing all other parameters.
We assume that a = 0.5, Wf = 0.1, �max = 0.3[1/h] and KS =2[g/l]. We only verify the case of b > 0. Here we set b =0.025. Then C = a/b(1 − Wf ) � 22.2[g/l]. We firstly check and
show influence of XT changes on the existence and stabilityof period-1 solution. We set S0 = 2[g/l], SF = 6[g/l] and X0 =1.6[g/l]. Then we have u = aSF + bWf (SF )2/2 � 3.05[g/l], U = u +(a − b(1 − Wf )SF )2/2b(2 − Wf ) � 4.45[g/l] and SF < C. The trajec-tory of the solution S(t), X(t) and the phase diagram (S(t), X(t))
980 Y. Tian et al. / Computers and Chemical Engineering 34 (2010) 976–984
Fig. 3. The time series and portrait phase of system (2) for S0 = 2[g/l], SF = 6[g/l], X0 = 1.6[g/l] and XT = 2.6[g/l].
) for S
fiatssstXd2c
t2t
Fig. 4. The time series and portrait phase of system (2
or XT = 2.6[g/l] and 3.6[g/l] are given in Figs. 3 and 4. Accord-ng to Theorem 5, in Fig. 3 we can see that the solution tends to
stable periodic solution, i.e., we can achieve a stable output ofhe microorganisms. Fig. 4 indicates that the critical level is giveno big that the biomass concentration can not reach it before theubstrate is used up in the bioreactor. These simulations are con-istent with the theoretical result of Theorem 5(i). Furthermore,he necessary condition for system (2) existing a period solution isT < min{u, I(X0, S0)} = min{3.05, 2.65} = 2.65[g/l] by 5(i). Fig. 5isplays the period-1 solution of system (2) for SF = 6[g/l], XT =.6[g/l], S0 = 1.62[g/l] and X0 = 2.34[g/l]. The period T � 0.864[h]alculated by Eq. (15).
Secondly we check and show influence of SF changes on the exis-ence and stability of period-1 solution. We set X0 = 1.6[g/l], XT =.6[g/l] and S0 = 2[g/l]. The trajectory of the solution S(t), X(t) andhe phase diagram (S(t), X(t)) for SF = 6[g/l] and 4[g/l] are given in
Fig. 5. The time series and portrait phase of system (2) for S0
Fig. 6. The time series and portrait phase of system (2) for S
0 = 2[g/l], SF = 6[g/l], X0 = 1.6[g/l] and XT = 3.6[g/l].
Figs. 3 and 6, respectively. Fig. 3 indicates that the solution tendsto a stable period solution. In Fig. 6, since the concentration ofthe feeding substrate is given so small that the substrate is usedup before the biomass concentration reaching the critical level XT
in some biomass oscillation cycle. So if we expect a stable outputof microorganism, the feeding substrate concentration should beproperly given.
Thirdly we check and show influence of X0 changes on the exis-tence and stability of period-1 solution. We set S0 = 2[g/l], SF =6[g/l] and XT = 2.6[g/l]. The trajectory of the solution S(t), X(t) andthe phase diagram (S(t), X(t)) for X0 = 1.2[g/l], 1.6[g/l] and 2[g/l]are given in Figs. 7, 3 and 8, respectively. In Fig. 7, the initial biomass
concentration is given so small that the substrate is used up beforethe biomass concentration reaching the critical level, i.e., the impul-sive effect does not happen. From Figs. 3 and 8 we can see that thesolution tends to a stable periodic solution.= 1.62[g/l], SF = 6[g/l], X0 = 2.34[g/l] and XT = 2.6[g/l].
0 = 2[g/l], SF = 4[g/l], X0 = 1.6[g/l] and XT = 2.6[g/l].

Y. Tian et al. / Computers and Chemical Engineering 34 (2010) 976–984 981
Fig. 7. The time series and portrait phase of system (2) for S0 = 2[g/l], SF = 6[g/l], X0 = 1.2[g/l] and XT = 2.6[g/l].
2) for
ftkbriiccdfcepw
6
cotipbipbaoeS(otcbft
Fig. 8. The time series and portrait phase of system (
A potential application area of the culture bioreactor with theeedback control is the commercial and industrial production ofhe microorganism. The microorganism in the bioreactor alwayseeps the highest growth rate and the biomass concentration cane controlled to a given level. In this way, we can determine theationality of the microorganism feedback concentration accord-ng to the conditions for the stability of the periodic solution,n other words, if we have the proper microorganism feedbackoncentration, we can achieve a stable output for a continuousulture system with feedback control in the circumstances ofetermined production environment. Furthermore, we obtain theeeding period for a regularly continuous culture system, whichan help with carrying out the processes and can be used forxample to check whether all measuring instruments (for exam-le the photoelectricity system or the annunciator) are workingell.
. Conclusions
In this study, the feedback control of microorganism continuousulture process for pulse dosage supply of substrates and removalf products was introduced and the dynamic property of this sys-em was investigated. By analytical method, it was showed thatf the parameters satisfy XT < aSF , then system (7) has a uniqueeriodic solution (�(t), �(t)), which is orbitally asymptotically sta-le and enjoys the property of asymptotic phase. Furthermore,
t was shown that (1) if XT < u, then system (2) has a uniqueeriodic solution (�(t), �(t)), which is orbitally asymptotically sta-le and enjoys the property of asymptotic phase; (2) if SF > Cnd u ≤ XT < U, then system (2) has two periodic solutions, onef which is orbitally asymptotically stable and enjoys the prop-rty of asymptotic phase, while the other is not stable; (3) ifF > C and XT = U, then system (2) has a unique periodic solution�(t), �(t)), the stability of which can not be determined by the the-rem of Bainov and Simeonov. Meanwhile, numerical simulations
o verify the theoretical results were presented. In addition, theomplete expression of period of the periodic solution was given,y which the continuous culture model with the impulsive stateeed-back control can be changed into a model with periodic con-rol.S0 = 2[g/l], SF = 6[g/l], X0 = 2[g/l] and XT = 2.6[g/l].
Appendix A.
Definition 1. (Bainov & Simeonov, 1993) (�(t), �(t)) is said to beperiod-1 solution if in a minimum cycle time, there is one impulseeffect. Similarly, (�(t), �(t)) is said to be period-2 solution if in aminimum cycle time, there are two impulse effects.
Let be the orbit of the periodic solution (�(t), �(t)).
Definition 2. (Bainov & Simeonov, 1993) is said to be orbitallystable, if for any ε > 0, there exists ı > 0, with the proviso thatevery solution (S(t), X(t)) of system (2) whose distance from isless than ı at t = t0, will remain within a distance less than ε from for all t ≥ t0. Such an is said to be orbitally asymptotically stableif, in addition, the distance of (S(t), X(t)) from tends to zero ast → ∞. Moreover, if there exist positive constants ˛, ˇ and a realconstant h such that �(S(t), (X(t)), ) < ˛e−ˇt for t > t0, then issaid to be orbitally asymptotically stable and enjoys the property ofasymptotic phase.
The proof of Theorem 2
Proof. By the first two equations of system (7), we have
dX = −adS. (16)
Integrate two sides of Eq. (16) from t0 to t, we have
X(t) = X0 + aS0 − aS(t). (17)
It is easily to see from (17) that if the impulsive effect happens, thecondition X0 + aS0 ≥ XT is necessary.
For t ∈ (t0, t0 + T], the solution S = �(t), X = �(t) of system (7)satisfies the relation (5), i.e.,
�(t) − �0 = a�0 − a�(t). (18)
In particular, for t = t0 + T , we have
�(T) − �0 = a�0 − a�(T)or
XT − �0 = a�0 − a�1. (19)
In view of Eq. (5), we have
Wf XT = a(�0 − �1) = aWf (SF − �1), (20)

9 mical
wX
XXa
P
�
A
�
S
�
S
�
B
(
B
a
o
�
E
(
B�
−p
P
I
X
Ic
X
i
s
�
I
�
o
X
82 Y. Tian et al. / Computers and Che
hich implies that �1 = SF − XT /a or �0 = Wf SF + (1 − Wf )(SF −T /a).
If XT < aSF , then we have �1 > 0. Therefore, if the critical levelT and the concentration of the feed substrate satisfy the conditionT < aSF , then system (7) has a unique periodic-1 solution withS0 + X0 ≥ XT . �
The proof of Theorem 4
roof. For t ∈ (t0, t1], by Eq. (16) we have
¯ (t) − �̄0 = a�̄0 − a�̄(t). (21)
nd for t ∈ (t1, t0 + T] we have
¯ (t) − �̄+1 = a�̄+
1 − a�̄(t). (22)
ubstitute t = t1 into Eq. (21), we have
¯1 − �̄0 = a�̄0 − a�̄1. (23)
ubstitute t = t0 + T into Eq. (22), we have
¯2 − �̄+1 = a�̄+
1 − a�̄2. (24)
y subtracting Eq. (23) from Eq. (24) we have
�̄2 − �̄1) + (�̄0 − �̄+1 ) = a�̄+
1 − a�̄0 + a�̄1 − a�̄2.
y Eq. (6) we have
�̄+1 − a�̄0 + a�̄1 − a�̄2 = 0
r
¯ +1 − �̄0 = �̄2 − �̄1. (25)
q. (25) also implies that
�̄+1 − �̄0)(�̄2 − �̄1) ≥ 0. (26)
y Eq. (6) we have �̄+1 − �̄0 = (1 − Wf )(�̄1 − �̄2). Since X = �̄(t), S =
¯ (t) is period-2 solution, then �̄+1 /= �̄0. Thus (�̄+
1 − �̄0)(�̄2 − �̄1) =(1 − Wf )(�̄2 − �̄1)2 < 0, which contradicts to Eq. (26). Therefore,eriod-2 solution of system (7) does not exist. �
The proof of Theorem 5
roof. By the first two equations of system (2) we have
dX
dS= −a − bS. (27)
ntegrate two sides of Eq. (27) from t0 to t, we have
(t) = X0 + aS0 + bS20
2− aS(t) − bS2(t)
2. (28)
t is easily to see from (28) that if the impulsive effect happens, theondition
0 + aS0 + bS20
2≥ XT (29)
s necessary.For t ∈ (t0, t0 + T], the solution S = �(t), X = �(t) of system (2)
atisfies the relation (28), i.e.,
(t) − �0 = a�0 + b�20
2− a�(t) − b�2(t)
2. (30)
n particular, for t = t0 + T , we have
b�20 b�2(T)
(T) − �0 = a�0 +2
− a�(T) −2
r
T − �0 = a�0 + b�20
2− a�1 − b�2
12
. (31)
Engineering 34 (2010) 976–984
In view of Eq. (5), we have
Wf XT = a(�0 − �1) + 12
b(�20 − �2
1)
= aWf (SF − �1) + 12 b[(Wf SF + (1 − Wf )�1)2 − �2
1].
It can be rewritten as a unitary quadratic equation about �1 asfollows
A�21 + B�1 + C = 0, (32)
where A = bWf (2 − Wf )/2 > 0, B = aWf − bWf (1 − Wf )SF , C =Wf XT − aWf SF − bW2
f(SF )2/2.
Let D = a/b(1 − Wf ), u = aSF + bWf (SF )2/2 and U = u +(a − b(1 − Wf )SF )2/2b(2 − Wf ). Denote I(S, X) = X + aS + bS2/2.
If B2 − 4AC ≥ 0, i.e., XT < U, then solving Eq. (32), we have
�11 = −B −
√B2 − 4AC
2A= ϕ1(XT ),
�21 = −B +
√B2 − 4AC
2A= ϕ2(XT ).
(33)
Case 1 B ≥ 0, i.e., SF ≤ D. In this case, �11 ≤ 0.
If C < 0, i.e.,
XT < u. (34)
Then we have �21 > 0;
Case 2 B < 0, i.e.,
SF > D. (35)
If C < 0, i.e., XT < u, then we have
�11 < 0, �2
1 > 0.
If 0 ≤ C < B2/4A, i.e.,
u ≤ XT < U. (36)
Then we have �11 ≥ 0 and �2
1 > 0;If
XT = U. (37)
Then we have �21 = �2
1 = −B/2A > 0.Thus, if conditions (29) and (34) hold, then system (2) has a
unique periodic solution with one impulse effect per period; ifconditions (29), (35) and (37) hold, then system (2) has a uniqueperiodic solution with one impulse effect per period; if conditions(29), (35) and (36) hold, then system (2) has two periodic solutionswith one impulse effect per period. �
The proof of Theorem 7
Proof. For t ∈ (t0, t1], by Eq. (27) we have
�̄(t) − �̄0 = a�̄0 + b
2�̄2
0 − a�̄(t) − b
2�̄2(t). (38)
And for t ∈ (t1, t0 + T] we have
�̄(t) − �̄+1 = a�̄+
1 + b
2(�̄+
1 )2 − a�̄(t) − b
2�̄2(t). (39)
Substitute t = t1 into Eq. (38), we have
�̄ − �̄ = a�̄ + b�̄2 − a�̄ − b
�̄2. (40)
1 0 0 2 0 1 2 1Substitute t = t0 + T into Eq. (39), we have
�̄2 − �̄+1 = a�̄+
1 + b
2(�̄+
1 )2 − a�̄2 − b
2�̄2
2. (41)

mical
B
(
B
a
o
(
E
(
B�
−p
Pps�(S
T
Sw
Y. Tian et al. / Computers and Che
y subtracting Eq. (40) from Eq. (41) we have
�̄2 − �̄1) + (�̄0 − �̄+1 ) = a�̄+
1 + b
2(�̄+
1 )2 −(
a�̄0 + b
2�̄2
0
)+ a�̄1
+ b
2�̄2
1 −(
a�̄2 + b
2�̄2
2
).
y Eq. (6) we have
�̄+1 + b
2(�̄+
1 )2 −(
a�̄0 + b
2�̄2
0
)+ a�̄1 + b
2�̄2
1 −(
a�̄2 + b
2�̄2
2
)= 0
r
�̄+1 − �̄0)
[a + b
2(�̄+
1 + �̄0)]
= (�̄2 − �̄1)[
a + b
2(�̄2 + �̄1)
]. (42)
q. (42) also implies that
�̄+1 − �̄0)(�̄2 − �̄1) ≥ 0. (43)
y Eq. (6) we have �̄+1 − �̄0 = (1 − Wf )(�̄1 − �̄2). Since X = �̄(t), S =
¯ (t) is period-2 solution, then �̄+1 /= �̄0. Thus (�̄+
1 − �̄0)(�̄2 − �̄1) =(1 − Wf )(�̄2 − �̄1)2 < 0, which contradicts to Eq. (43). Therefore,eriod-2 solution of system (2) does not exist. �
The proof of Theorem 8
roof. According to Theorem 1 we calculate the multi-lies �2 of the system (7) corresponding to the T-periodicolution (�(t), �(t)). Denote P0(�0, �0), P1(�1, �1), where1 = XT , �0 = (1 − Wf )XT , �0 = Wf SF + (1 − Wf )�1. In system7), since P(S, X) = �maxSX/(KS + S), R(S, X) = −1/a.�maxSX/(KS +), ˛(S, X) = −Wf X, ˇ(S, X) = Wf (SF − S) and �(S, X) = X − XT , then
∂P
∂X= �maxS
KS + S,
∂R
∂S= −1
a.�maxXKS
(KS + S)2,
∂˛
∂X= −Wf ,
∂˛
∂S= 0,
∂ˇ
∂X= 0,
∂ˇ
∂S= −Wf ,
∂�
∂X= 1,
∂�
∂S= 0.
herefore,
�1 =P+
((∂ˇ/∂S)(∂�/∂X) − (∂ˇ/∂X)(∂�/∂S) + (∂�/∂X)
)P(∂�/∂X) + R(∂�/∂S)
+R+
((∂˛/∂X)(∂�/∂S) − (∂˛/∂S)(∂�/∂X) + (∂�/∂S)
)P(∂�/∂X) + R(∂�/∂S)
= P+(1 − Wf )P
= (1 − Wf )�max�0�0/KS + �0
�max�1�1/KS + �1
= (1 − Wf )2 �0(KS + �1)�1(KS + �0)
;
�2 = �1 exp
(∫ T
0
[∂P
∂X(�(t), �(t)) + ∂R
∂S(�(t), �(t))
]dt
)
= �1 exp
(∫ T
0
�maxS
KS + Sdt −
∫ T
0
1a
�maxXKS
(KS + S)2dt
)= �1 exp
(∫ �1
�0
1X
dX +∫ �1
�0
KS
S(KS + S)dS
)�1 �1 K + �0
= �1 ·�0·�0
· S
KS + �1= (1 − Wf ).
ince 0 < Wf < 1, then we have 0 < �2 < 1. Then by Theorem 1e conclude that the T-periodic solution (�(t), �(t)) of system (7) is
Engineering 34 (2010) 976–984 983
orbitally asymptotically stable and enjoys the property of asymp-totic phase. �
The proof of Theorem 9
Proof. According to Theorem 1 we calculate the multiplies�2 of the system (2) in variations corresponding to the T-periodic solution (�(t), �(t)). Denote P0(�0, �0), P1(�1, �1),where �1 = XT , �0 = (1 − Wf )XT , �0 = Wf SF + (1 − Wf )�1. Insystem (2), since P(S, X) = �maxSX/(KS + S), R(S, X) = −1/(a +bS).�maxSX/(KS + S), ˛(S, X) = −Wf X, ˇ(S, X) = Wf (SF − S) and�(S, X) = X − XT , then
∂P
∂X= �maxS
KS + S,
∂R
∂S= b
(a + bS)2.�maxSX
KS + S− 1
a + bS.�maxXKS
(KS + S)2,
∂˛
∂X= −Wf ,
∂˛
∂S= 0,
∂ˇ
∂X= 0,
∂ˇ
∂S= −Wf ,
∂�
∂X= 1,
∂�
∂S= 0.
Therefore,
�1 =P+
((∂ˇ/∂S)(∂�/∂X) − (∂ˇ/∂X)(∂�/∂S) + (∂�/∂X)
)P(∂�/∂X) + R(∂�/∂S)
+R+
((∂˛/∂X)(∂�/∂S) − (∂˛/∂S)(∂�/∂X) + (∂�/∂S)
)P(∂�/∂X) + R(∂�/∂S)
= P+(1 − Wf )P
= (1 − Wf )�max�0�0/KS + �0
�max�1�1/KS + �1
= (1 − Wf )2 �0(KS + �1)�1(KS + �0)
;
�2 = �1 exp
(∫ T
0
[∂P
∂X(�(t), �(t)) + ∂R
∂S(�(t), �(t))
]dt
)
= �1 exp
(∫ T
0
�maxS
KS+Sdt+
∫ T
0
b
(a+bS)2
�maxSX
KS+Sdt−
∫ T
0
1a+bS
�maxXKS
(KS+S)2dt
)= �1 exp
(∫ �1
�0
1X
dX +∫ �1
�0
−b
a + bSdS +
∫ �1
�0
KS
S(KS + S)dS
)= �1 · �1
�0· a + b�0
a + b�1· �1
�0· KS + �0
KS + �1
= (1 − Wf )a + b�0
a + b�1.
Since �0 = Wf SF + (1 − Wf )�1, then we have
�2 = (1 − Wf )a + b(Wf SF + (1 − Wf )�1)
a + b�1.
For SF ≤ D, if XT < u, then by Eq. (33), we have
�1 =√
B2 − 4AC − B
2A>
−B
2A= b(1 − Wf )SF − a
b(2 − Wf ),
i.e.,
bWf (2 − Wf )�1 > Wf [(1 − Wf )bSF − a],
which is equivalent to
b(1 − (1 − Wf )2)�1 > (1 − Wf )(a + bWf SF ) − a,
or
0 < (1 − Wf )a + b(Wf SF + (1 − Wf )�1)
a + b�1< 1.
Thus we have |�2| < 1.For SF > D, if XT < u, then we have
�1 =√
B2 − 4AC − B
2A>
−B
2A= b(1 − Wf )SF − a
b(2 − Wf ),

9 mical
w
�
w
�
w
�
w
t
R
A
B
B
B
C
C
D
D
G
H
84 Y. Tian et al. / Computers and Che
hich implies that |�2| < 1;if u ≤ XT < U, then we have
1 =√
B2 − 4AC − B
2A>
−B
2A= b(1 − Wf )SF − a
b(2 − Wf ),
hich implies that |�2| < 1; while
1 = −√
B2 − 4AC − B
2A<
−B
2A= b(1 − Wf )SF − a
b(2 − Wf ),
hich implies that �2 > 1;If XT = U, then we have
1 = −B
2A= b(1 − Wf )SF − a
b(2 − Wf ),
hich implies that �2 = 1.Then according to Theorem 1, the conclusion of Theorem 9 is
rue. �
eferences
lvarez-Ramirez, J., Alvarez, J., & Velasco, A. (2009). On the existence of sustainedoscillations in a class of bioreactors. Computers and Chemical Engineering, 33, 4–9.
ailey, J. E., & Ollis, D. F. (1986). Biochemical Engineering Fundamentals (2nd ed.). NewYork: McGraw-Hill.
ainov, D., & Simeonov, P. (1993). Impulsive differential equations: Periodic solu-tions and applications. Pitman Monographs and Surveys in Pure and AppliedMathematics.
uler, G. J., Hsu, S. B., & Waltman, P. (1985). A mathematical model of the chemostatwith periodic washout rate. SIAM Journal on Applied Mathematics, 45, 435–449.
rooke, P. S., & Tanner, R. D. (1982). Hopf bifurcations for a variable yield continuousfermentation model. International Journal of Engineering Science, 20, 439–443.
rooke, P. S., Wel, C. J., & Tanner, R. D. (1980). The effect of the specific growth rateand yield expressions on the existence of oscilatory behavior of a continuousfermentation model. Chemical Engineering Communications, 6, 333–347.
e Leenheer, P., Levin, S. A., Sontag, E. D., & Klausmeier, C. A. (2006). Global stabil-ity in a chemostat with multiple nutrients. Journal of Mathematical Biology, 52,419–438.
e Leenheer, P., & Simth, H. (2003). Feedback control for chemostat models. Journalof Mathematical Biology, 46, 48–70.
ouze, J. L., & Robledo, G. (2005). Feedback control for nonmonotone competi-tion models in the chemostat. Nonlinear Analysis: Real World Applications, 6,671–690.
su, S. B., Hubbell, S., & Waltman, P. (1977). A mathematical theory for single-nutrient competition in continuous cultures of micro-organisms. SIAM Journalon Applied Mathematics, 32, 366–383.
Engineering 34 (2010) 976–984
Huang, X. C. (1990). Limit cycles in a continuous fermentation model. Journal ofMathematical Chemistry, 5, 287–296.
Jiang, G. R., Lu, Q. S., & Qian, L. N. (2007a). Chaos and its control in an impulsivedifferential system. Chaos Solitons & Fractals, 34, 1135–1147.
Jiang, G. R., Lu, Q. S., & Qian, L. N. (2007b). Complex dynamics of a Holling type IIprey-predator system with state feedback control. Chaos Solitons & Fractals, 31,448–461.
Kasperski, A. (2008). Modelling of cells bioenergetics. Acta Biotheoretica, 56,233–247.
Kasperski, A., & Miskiewicz, T. (2008). Optimization of pulsed feeding in a Baker’syeast process with dissolved oxygen concentration as a control parameter. Bio-chemical Engineering Journal, 40, 321–327.
Kubitschek, H. E. (1970). Introduction to research with continuous culture. EnglewoodCliffs, New Jersey: Prentice-Hall.
Liu, X., & Chen, L. (2003). Complex dynamics of Holling type II Lotka–Volterrapredator-prey system with impulsive perturbations on the predator. Chaos, Soli-tons & Fractals, 16, 311–320.
Lobry, J. R., Flandrois, J. P., Carret, G., & Pavemonod’s, A. (1992). Bacterial growthmodel revisited. Bulletin of Mathematical Biology, 54(1), 117–122.
Luedeking, R., & Piret, E. L. (1959). A kinetic study of the lactic acid fermentation.Batch process at controlled pH. Journal of Biochemical and Microbiological Tech-nology Engineering, 1, 393–412.
Monod, J. (1950). Continuous culture technique: Theory and applications. Annalesde l’Institut Pasteur, 79, 390–410.
Pilyugin, S. S., & Waltman, P. (2003). Multiple limit cycles in the chemostat withvariable yield. Mathematical Biosciences, 182, 151–166.
Rehm, H. J., & Reed, G. (Eds.). (1981). Microbial Fundamentals. Weinheim: VerlagChemie.
Schugerl, K. (1987). Bioreaction engineering: Reactions involving microorganisms andcells: Fundamentals, thermodynamics, formal kinetics, idealized reactor types andoperation. Chichester, UK: John Wiley & Sons.
Schugerl, K., & Bellgardt, K. H. (Eds.). (2000). Bioreaction engineering. Modeling andcontrol. Berlin/Heidelberg: Springer-Verlag.
Smith, R. (2001). Impulsive differential equations with applications to self-cycling fer-mentation. Thesis for the degree doctor of philosophy. McMaster University.
Sun, S. L., & Chen, L. S. (2007). Dynamic behaviors of Monod type chemostat modelwith impulsive perturbation on the nutrient concentration. Journal of Mathe-matical Chemistry, 42, 837–847.
Sun, S. L., & Chen, L. S. (2008). Permanence and complexity of the Eco-Epidemio-logical model with impulsive perturbation. International Journal ofBiomathematics, 1, 121–132.
Tang, S. Y., & Chen, L. S. (2002). Density-dependent birth rate, birth pulses and theirpopulation dynamic consequences. Journal of Mathematical Biology, 44, 185–199.
Tang, S. Y., & Chen, L. S. (2004). The effect of seasonal harvesting on stage-structuredpopulation models. Journal of Mathematical Biology, 48, 357–374.
Tang, S. Y., & Chen, L. S. (2004). Modelling and analysis of integrated pest manage-
ment strategy. Discrete and Continuous Dynamical Systems Series B, 4, 759–768.Yamane, T., & Shimizu, S. (1984). Fed-batch techniques in microbial processes. Advancesin biochemical engineering biotechnology, 30 (pp. 147–194). Berlin: Springer.
Zeng, G. Z., Chen, L. S., & Sun, L. H. (2006). Existence of periodic solution of order oneof planar impulsive autonomous system. Journal of Computational and AppliedMathematics, 186, 466–481.