Embed Size (px)
Citation preview

1
Modelling and control of an electromechanical steeringsystem in full vehicle modelsY Du1*, M A Lion1, and P Maißer2
1CAE-Methods, Volkswagen AG, Wolfsburg, Germany2Institute of Mechatronics at the Chemnitz University of Technology, Germany
The manuscript was received on 10 September 2004 and was accepted after revision for publication on 12 December 2005.
DOI: 10.1243/09596518JSCE96
Abstract: In the automotive industry, electrical and electromechanical components andsystems become more and more important. In comparison with commonly used mechanicaland hydraulic systems they offer a large number of advantages with respect to efficiency andflexibility, for example. Therefore, conventional hydraulic steering systems are being replacedmore and more with electromechanical ones. Currently, different concepts of electromechanicalsteering systems are being developed. In this work an electromechanical steering system withdouble pinions is modelled based on a uniform theory for discrete electromechanical systems.This steering system is implemented into a multibody full vehicle model and a control schemehas been developed. Subsequently, the performance of the whole electromechanical system,and especially the behaviour of the controller, has been tested with different handlingmanoeuvres.
Keywords: electromechanical steering system, electromechanical systems, multibodyvehicle model, full vehicle model, driver model, vector control, field-oriented control
1 INTRODUCTION steering wheel and gear rack. Thus, in case of a failureof the servo motor the vehicle can still be steered
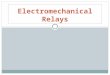
Currently, an increasing importance is attached to mechanically.electromechanical components in the automotive In this research work, an asynchronous electricalindustry. An outstanding example is the electro- machine is used as the servo motor. Due to itsmechanical steering system which is characterized brushless design the asynchronous machine offersby efficiency, steering comfort, adaptability, and many advantages and is a very compact and durableenvironmental friendliness. It already fulfils a large functional unit. For the operation of this steeringnumber of requirements for steering systems of the system different input signals are required. The mostfuture [1]. In the case of electromechanical steering important signal is from the torque sensor on thedifferent concepts are known [2, 3]. In this paper, the torsion bar, which corresponds with the hand torqueconcept with double pinions as shown in Fig. 1 is of the driver applied on the steering wheel. A furtherconsidered. This kind of steering system is equipped important signal is the angular velocity of the rotor,with two pinions. While the steering pinion transfers which is necessary for a precise control of thethe steering torque applied by the driver, the torque asynchronous machine. This signal is measured bygenerated by the servo motor is introduced over means of an angular velocity sensor. An optimallyan additional servo pinion into the gear rack [4]. adapted steering support can be achieved by takingAs a fundamental property of this construction, a further information into account, e.g. the vehiclemechanical connection always survives between velocity or the steering angle. In order to generate
various steering functions, the input signals are pro-cessed by an algorithm in the control unit. Subjects* Corresponding author: 1573 CAE-Methods, Volkswagen AG,
Wolfsburg 38436, Germany. email: [email protected] of the present research work are the modelling and
JSCE96 © IMechE 2006 Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

2 Y Du, M A Lion, and P Maißer
where qm is the vector of electrical generalizedcoordinates (charges of the fundamental loops), Ais the fundamental loop matrix describing thelinear dependence between the branch chargesand the electrical generalized coordinates, and q0(t)represents the charges of the current sources in theelectrical network. Furthermore, ql is the vector of
Fig. 1 Electromechanical steering system with double mechanical generalized coordinates. The numberpinions of components of the generalized electrical and
mechanical coordinate vectors qm and ql is calledquasi degree of freedom n of the discrete EMS.control of such an electromechanical steering systemThen, the vector q=(qm ; ql) can be interpreted asin a multibody full vehicle model. The behaviour ofthe representing point of the discrete EMS in thethe whole system is tested using different handlingn-dimensional configuration space Rn. The motionmanoeuvres with the help of a driver model.equations of a discrete EMS can be written in theform
2 MODELLING OF THE ELECTROMECHANICAL M(t, ql)ql+K(t, ql, ql)+Ql(t, ql, ql)STEERING SYSTEM
+Qm(t, ql, qm, qm)=0 (1)The steering system as shown above is a typical
L(t, ql)qm+G(t, ql, ql, qm)+R(t, ql)qmelectromechanical system (EMS). It represents aphysical heterogeneous structure, which can be +C(t, ql)qm+V(t, ql)=0 (2)characterized by the interactions between electro-magnetic fields and mechanical objects [5]. The where M(t, ql) is the generalized mass matrix,dynamical behaviour and interactions within such a K(t, ql, ql) is the vector of generalized gyroscopic/system can be described by coupling the methods of Coriolis forces, Ql(t, ql, ql) is the vector of themultibody dynamics with the Kirchhoff theory [6, 7]. generalized applied forces having a pure mechanicalFor this purpose the approach of generating uniform origin (e.g. gravity, springs, frictions, and dampers),Lagrangean motion equations for the whole EMS and Qm(t, ql, qm, qm) is the vector of applied forcesworks well [7]. caused by electromagnetic fields. The matrix
L(t, ql) contains the generalized inductances and2.1 Lagrangean formalism for discrete EMS G(t, ql, ql, qm) is the vector of generalized gyroscopic/
Coriolis voltages. R(t, ql) is the matrix of generalizedTo describe the dynamical behaviour of discreteresistances, C(t, ql) represents the generalizedelectromechanical systems with the Lagrangeancapacitances, and V(t, ql) denotes the vector of theformalism, its application has been transferred firstgeneralized applied voltages.to pure electrical systems with concentrated para-
Obviously, the mechanical part (1) of the motionmeters, such as resistors, capacitors, and inductors [8].equations contains additional forces depending onThe topology of the electrical system can bethe generalized electrical coordinates. On the otherrepresented by a so-called network graph C. Thehand, the coefficient matrices appearing in theset {q:
j, x: k
s| jµC; s=1, … , 6, k=1, … , K} is called a
electrical part (2) of the motion equations can dependposition of the EMS, where q:j
are the branch chargeson the mechanical generalized coordinates. Thus, theand x: k
sthe mechanical coordinates of a given number
coupling between the mechanical and electricalof K rigid bodies. The kinematics of the EMS is deter-parts of the system is completely represented by thismined by the constraint conditions, which are giventheory. The mathematical and physical foundationsby Kirchhoff’s current law of the electrical networkand details of this uniform approach can be foundand the geometric connections between the rigidin reference [9].bodies. The vectors of the branch charges q:=(q:
j)
The theory of the Lagrangean formalism for discreteand the mechanical coordinates x:=(x: ks) which
electromechanical systems is implemented in thesatisfy the constraint conditions of the EMS at thesimulation program alaska, which was developed attime t can be written asthe Institute of Mechatronics in Chemnitz, Germany.
q:=Aqm+q0(t)The Lagrangean motion equations (1) and (2) of anEMS can be generated automatically in alaska.x:=x: (ql, t)
JSCE96 © IMechE 2006Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

3Electromechanical steering system in full vehicle models
2.2 Modelling of the induction machine electrical machine of this kind can be modelledeasily. The network graph of a three-phase induction
In general an induction machine consists of a statormachine is shown in Fig. 3.
and a rotor, which are connected by a revolute joint.From the above network graph the fundamental
An induction machine possessing a three-phase wind-loop matrix can be written as
ing system in the stator and a further three-phasewinding system in the rotor is of special interest inthis research work. In order to formulate the modelfor the induction machine the following conditionsare assumed to be fulfilled:
A=
tNNNNNNNNv
1 0 0 0 0 0 1 0 0 0 0 0
0 1 0 0 0 0 0 1 0 0 0 0
0 0 1 0 0 0 0 0 1 0 0 0
0 0 0 1 0 0 0 0 0 1 0 0
0 0 0 0 1 0 0 0 0 0 1 0
0 0 0 0 0 1 0 0 0 0 0 1
uNNNNNNNNw
T
1. The windings can be replaced by concentratedwindings.
2. The magnetization characteristic is linear andwithout saturation.
3. The magnetomechanical interactions are deter- This three-phase induction machine has seven quasimined by the field distribution in the air gap degrees of freedom. Accordingly,between the rotor and stator.
q=(qm ; ql)=(q1, q2, q3, q4, q5, q6; q7)4. Dissipative core losses and temperature depend-
ence of the resistances and inductances are =(qas , qbs , qcs , qar , qbr , qcr ; hrm)
neglected.is the vector of the generalized coordinates, where q
j,
Figure 2 shows the model of an idealized three-phase jµ{1, … , 6}, denotes the charge in the fundamentalinduction machine. In the following considerations, loop j and q
7is the mechanical rotation angle h
rmof
the indices s and r denote quantities referring to the rotor. Consequently,stator and rotor, while a, b, and c denote the three
q=(qm ; ql)=(q1, q2, q3, q4, q5, q6; q7)phases. The inductances arranged in the stator and
rotor windings are then represented by three coils =(ias , ibs , ics , iar , ibr , icr ; vrm)
staggered by 2p/3 in each case. Each of these sixis the vector of the generalized velocities, where q
j,coils forms a fundamental loop together with an
jµ{1, … , 6}, denotes the current in the fundamentalOhm’s resistance and a voltage source. If no voltageloop j and q
7is the mechanical angular velocity v
rmsource is applied in the rotor windings, a so-calledof the rotor.asynchronous machine is obtained.
If the induction machine possesses p polesWith the help of the electromechanical modelling( p
p=p/2 pole pairs), a so-called electrical angle h
rcomponents contained in alaska, e.g. capacitors (C),of the rotor can be introduced in accordance withcoils (L), resistors (R), and voltage sources (V), an
hr=pphrmConsequently, the electrical angular velocity isdefined by
vr=ppvrmThe parameters describing the physical properties ofthe electrical components are still required for thecomplete description of the induction machine. In
Fig. 2 Idealized model of a three-phase induction Fig. 3 Network graph of a three-phase inductionmachinemachine
JSCE96 © IMechE 2006 Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

4 Y Du, M A Lion, and P Maißer
accordance with the fundamental assumptions, the 2.3 Electromechanical steering system in a fullOhm’s resistances r
sof the stator windings and r
rof vehicle model
the rotor windings are constant. The inductancesThe electrical machine as discussed above was
of the induction machine can be written in matriximplemented in the steering system of a multibody
form asfull vehicle model according to the double pinionconcept. For the purpose of describing the forcesbetween the road and the wheel hub, the tyre modelRMOD-K is used (see references [10] to [12]). The
L=
tNNNNNNNNv
Lls+Lss Lsm Lsm L0sr Lpsr LmsrLsm Lls+Lss Lsm Lmsr L0sr LpsrLsm Lsm Lls+Lss Lpsr Lmsr L0srL0sr Lmsr Lpsr Llr+Lrr Lrm LrmLpsr L0sr Lmsr Lrm Llr+Lrr LrmLmsr Lpsr L0sr Lrm Lrm Llr+Lrr
uNNNNNNNNw
parking torque and the steering torque at a standstillof the vehicle can also be calculated with this tyremodel. The multibody full vehicle model in com-bination with the electromechanical steering systemis shown in Fig. 4.The parameter L
ssdenotes the self-inductance of
The differential equations of this model arethe stator windings and Lsm=L
sscos(2p/3) the
generated automatically by the program alaska. Duemutual inductance between two stator windings. Lrr to the inductances the mechanical coordinate h
rmis the self-inductance of the rotor windings and
enters the electrical part (2) of the motion equations.Lrm=L
rrcos(2p/3) the mutual inductance between
On the other hand, the electromagnetic torquetwo rotor windings. Lls
is the leakage inductance ofoccurs as an additional force in the mechanicalthe stator windings and L
lrthe leakage inductance
part (1) of the motion equations. The simultaneousof the rotor windings. The relations L0sr=L
srcos h
r,
solution of the motion equations of both modelLpsr=L
srcos(h
r+2p/3), Lm
sr=L
srcos(h
r−2p/3) are con-
parts guarantees the correct description of allsidered, where Lsr
is the peak value of the mutualelectromechanical interactions occurring in theinductance between the stator and rotor windings.model.To generate the differential equations of an EMS
the program alaska requires the derivatives of theparameters describing the physical properties of 2.4 A driver model for testing thethe electrical components with respect to both the electromechanical steering systemmechanical coordinates and the time. It is recognized
In order to simulate the dynamical behaviour of thethat the parameters L0
sr, Lp
sr, and Lm
srof the inductance
electromechanical steering system with different,matrix depend on the time-dependent rotor angle h
rm.
more or less complicated driving manoeuvres, aTherefore, the partial derivative of the inductancedriver model is used. This driver model consists ofmatrix with respect to the rotor angle h
rmis not zero
both a trace controller and a velocity controller. Itand must be indicated ashas proven itself in various applications [12]. Theconcept of the trace controller, which works withpreview, is sketched in Fig. 5.
The prescribed target trace Ct(s) that the vehicle
model has to follow lies in the (Ex, E
y) plane ofqL
qhrm=
tNNNNNNNNv
0 0 0 L0∞sr Lp∞sr Lm∞sr0 0 0 Lm∞sr L0∞sr Lp∞sr0 0 0 Lp∞sr Lm∞sr L0∞sr
L0∞sr Lm∞sr Lp∞sr 0 0 0
Lp∞sr L0∞sr Lm∞sr 0 0 0
Lm∞sr Lp∞sr L0∞sr 0 0 0
uNNNNNNNNw
the inertial system and uses the arc length s asthe representation or curve parameter. The local
with L0∞sr=−p
pL
srsin h
r, Lp∞
sr=−p
pL
srsin(h
r+2p/3)
and Lm∞sr=−p
pL
srsin(h
r−2p/3). The time derivative
of the inductance matrix can then be written as
dLdt=vrm
tNNNNNNNNv
0 0 0 L0∞sr Lp∞sr Lm∞sr0 0 0 Lm∞sr L0∞sr Lp∞sr0 0 0 Lp∞sr Lm∞sr L0∞sr
L0∞sr Lm∞sr Lp∞sr 0 0 0
Lp∞sr L0∞sr Lm∞sr 0 0 0
Lm∞sr Lp∞sr L0∞sr 0 0 0
uNNNNNNNNw
Fig. 4 A multibody full vehicle model with electro-mechanical steering system
JSCE96 © IMechE 2006Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

5Electromechanical steering system in full vehicle models
this purpose a simple proportional controller is used
MA=kA(vsoll−vx), (6)
where kA
is a gain factor of the drive torqueregulation. A detailed description of this driver modelcan be found in reference [13].
2.5 Determination of the entire steering torqueand the desired support torque
A main characteristic of the electromechanicalsteering system is that the steering motion is givenat each time by the driver. The corresponding joint
Fig. 5 Quantities and notations for the trace control reaction forces enforcing the given motion can becalculated by means of inverse dynamics of themechanical subsystem. To this end, the generalizedtangent vector and the associated normal vector aremechanical coordinates ql are divided into so-calleddesignated with e
t(s) and e
n(s). Furthermore, v is the
intrinsic coordinates ql1, whose motion is pre-velocity vector of a vehicle-fixed reference point. The
scribed, and external coordinates ql2. Then, thetravelled distance covered on the target trace is
motion equations describing the dynamics of thedenoted by s(t), which also defines the position of amechanical subsystem can be formulated asreference point. It can be calculated by means of the
following differential equation Ml1l1
ql1+M
l1l2
ql2+Kl
1+Ql
1+QR=0 (7)
s(t)=r(s)
r(s)+d(s)v(t) ·et(s) (3) M
l2l1
ql1+M
l2l2
ql2+Kl
2+Ql
2=0 (8)
If the rheonomic constraints of the intrinsicThereby r(s) denotes the local curvature radius of thecoordinates are given astarget curve at the reference point; d(t) denotes the
lateral deviation between the vehicle and the target ql1=ql10(t)
trace and can be determined with the differentialequation the reaction forces QR can be determined from
equations (7) and (8) using inverse dynamics (see alsod(t)=v(t) ·en(s) (4)reference [14]). The calculated reaction force enforces
The direction deviation y(sV
, t) is defined by the the prescribed motion of the steering system andangle between the longitudinal axis e
xof the vehicle corresponds to the entire necessary steering torque
and a preview vector eV
, which points from the ML
. The task of the electrical machine of the electro-vehicle-fixed reference point to the preview point mechanical steering system is to supply a certainC
t(s+s
V). This preview point lies about the so-called part of the entire steering torque. In the following
preview distance sV
before the reference point on the considerations the support torque generated by thetarget trace. electrical machine is denoted as M
E. The remaining
The steering wheel angle Qs(t) required for the steering torque M
L−M
Ecorresponds with the torque
trace control is determined by means of a first-order stamped at the torsion bar and will therefore bedifferential equation linearly dependent on the lateral called the hand torque M
H. The target relationship
deviation d(t) and the direction deviation y(sV
, t) between the hand torque and the support torqueis determined or estimated by the development
Qs(t)=1
tQ
[kyy(sV , t)+k
dd(t)−Q(t)] (5) engineer in accordance with the desired steering
feeling. It is given, for example, in the form of acharacteristic field as shown in Fig. 6. The character-The behaviour of the trace controller can be adjusted
by the time constant tQ
and the two gain factors ky
istic field matches the desired value of the supporttorque M*
Eto that of the vehicle velocity and theand k
d.
The velocity controller is realized by regulating hand torque.If i denotes the gear ratio between the rotor ofthe drive torque M
Adepending on the difference
between the current velocity of the vehicle in forward the electrical machine and the steering wheel, theelectrical machine must generate a torque m*
E=iM*
E.direction v
s=v ·e
sand the desired velocity v
soll. For
JSCE96 © IMechE 2006 Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

6 Y Du, M A Lion, and P Maißer
Voltage equations for the rotor
uar=
dYar
dt+i
arr
r
ubr=
dYbr
dt+i
brr
r
ucr=
dYcr
dt+i
crr
r
(10)
Constitutive equations (flux–current relationships)
Fig. 6 Characteristic field for the determination ofsupport torque
tNNNNNNNNv
Yas
Ybs
Ycs
Yar
Ybr
Ycr
uNNNNNNNNw
3 CONTROL OF THE ELECTROMECHANICALSTEERING SYSTEM
Since in this steering system the rotor of the electricalmachine is connected mechanically with the steeringwheel, the rotation of the rotor is determined by thesteering wheel motion initiated by the driver and
=
tNNNNNNNNv
Lls+L
ssL
smL
smL0
srLp
srLm
sr
Lsm
Lls+L
ssL
smLm
srL0
srLp
sr
Lsm
Lsm
Lls+L
ssLp
srLm
srL0
sr
L0sr
Lmsr
Lpsr
Llr+L
rrL
rmL
rm
Lpsr
L0sr
Lmsr
Lrm
Llr+L
rrL
rm
Lmsr
Lpsr
L0sr
Lrm
Lrm
Llr+L
rr
uNNNNNNNNw
cannot be controlled. Therefore, the control task ofthe electromechanical steering system is to producethe desired torque as accurately as possible at anygiven angular velocity of the rotor. For this highlydynamical servo drive it is necessary to employ thedynamic model of the electrical machine duringthe design of the controller. The presuppositions, tosupply the electrical machine with voltages of con- ×
tNNNNNNNNv
ias
ibs
ics
iar
ibr
icr
uNNNNNNNNw
(11)trollable amplitude, frequency, and phase, can beeasily fulfilled nowadays by efficient power switchesand fast microprocessors.
In the equations (9) and (10), ulk
with lµ{a, b, c}3.1 Model equations of an induction machine in
and kµ{s, r} denote the externally supplied voltages.the a–b–c reference frame
It should be noted that ulr=0 holds for asynchronous
electrical machines. The quantities Ylk
denote theAccording to the electrical part (2) of the motionflux linkages. The electromagnetically generated airequations the dynamic model of the inductiongap torque, which corresponds to Qm(t, ql, qm) in themachine can be expressed explicitly in the so-calledmechanical part (1) of the motion equations, can bea–b–c reference frame as follows.expressed in explicit form as
Voltage equations for the statormE=
1
2∑l∑k
qYlkqhrm
ilku
as=
dYas
dt+i
asr
s Using the matrix qL/qhrm
, this expression simplifiesto (see also reference [15])
ubs=
dYbs
dt+i
bsr
s
mE=pp√3
(Yas ibs−Ybs ias)+
pp√3
(Ybs ics−Ycs ibs)
ucs=
dYcs
dt+i
csr
s
+pp√3
(Ycs ias−Yas ics) (12)
(9)
JSCE96 © IMechE 2006Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

7Electromechanical steering system in full vehicle models
This system of coupled differential equations (9) The quantities to be transformed may be voltages,currents, or flux linkages. The inverse transformationto (12) shows that the induction machine is a non-
linear, multivariable system. In order to control it, a matrix from the q–d–0 to the a–b–c reference framecan be written asfield-oriented scheme [16, 17] is employed in this
research work. The decoupling of the equations canbe achieved by substituting the a–b–c referenceframe with a so-called q–d–0 reference frame. T(Q)−1=C cos Q sin Q 1
cos(Q−2p/3) sin(Q−2p/3) 1
cos(Q+2p/3) sin(Q+2p/3) 1D3.2 Model equations of an induction machine inthe q–d–0 reference frame
Applying this transformation to the voltage andA so-called q–d–0 reference frame rotating with an constitutive equations in the a–b–c reference frame,electrical angular velocity v in the same direction the corresponding equations in the q–d–0 referenceas the rotor is shown in Fig. 7. In the special case frame are the following ones.of v=0 there is a stationary reference frame. Settingv=v
e, where v
eis the so-called synchronous
Voltage equations for the statorelectrical angular velocity of the magnetic field of thestator, a synchronously rotating reference frame can
uqs=
dYqs
dt+vY
ds+r
si
qsbe obtained. The transformation of a quantity fromthe a–b–c to the q–d–0 reference frame can be carriedout with the following matrix u
ds=
dYds
dt−vY
qs+r
si
ds
u0s=
dY0s
dt+r
si
0sT(Q)=
2
3Ccos Q cos(Q−2p/3) cos(Q+2p/3)
sin Q sin(Q−2p/3) sin(Q+2p/3)
1/2 1/2 1/2 D(13)
The matrix T(Q) in fact describes a linear transform-ation in the velocity space of the planar electrical
Voltage equations for the rotormachine. Looking at Fig. 7, it is clear that Q=h=∆t
0v(t) dt+h(0) applies to the quantities belonging
uqr=
dYqr
dt+(v−v
r)Y
dr+r
ri
qrto the stator and Q=h−hr
to the quantities of therotor. Applying the matrix T(Q) to the stator or rotorquantities, the following transformation relation holds u
dr=
dYdr
dt−(v−v
r)Y
qr+r
ri
dr
u0r=
dY0r
dt+r
ri
0rC fqfdf0D=T(Q)C fafbf
cD
(14)
Constitutive equations
tNNNNNNNNv
Yqs
Yds
Y0s
Yqr
Ydr
Y0r
uNNNNNNNNw
=
tNNNNNNNNv
L∞s
0 0 Lm
0 0
0 L∞s
0 0 Lm
0
0 0 Lls
0 0 0
Lm
0 0 L∞r
0 0
0 Lm
0 0 L∞r
0
0 0 0 0 0 Llr
uNNNNNNNNw
tNNNNNNNNv
iqs
ids
i0s
iqr
idr
i0r
uNNNNNNNNw
(15)
In the equations (13), (14), and (15) the definitionsL∞
s=L
ls+3L
ss/2, L∞
r=L
lr+3L
rr/2, and L
m=3L
sr/2 and
Fig. 7 Induction machine in a q-d-0 reference frame are taken into account. In terms of q–d–0 quantities,
JSCE96 © IMechE 2006 Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

8 Y Du, M A Lion, and P Maißer
the air gap torque generated by the electical machine into equation (20) the following relation holdscan be expressed in the following form (see, forexample, reference [18]) L∞r
rrLm
dYedr
dt+
1
LmYedr= ie
ds (21)mE=
32pp(Yqr idr−Ydr iqr) (16)
This relation means that the rotor flux linkage Yedr3.3 Field-oriented control of the asynchronous can be controlled, in principle, by adjusting the d
machine component of the stator current ieds
. Since itsdynamic behaviour is limited by the rotor circuit timeSelecting, for example, a synchronously rotatingconstant L∞
r/r
r, the control of Ye
dris not suitable forq–d–0 reference frame whose d axis is aligned with
fast changes in torque. Considering equation (19),the rotor field (see Fig. 8, where all quantities in thisthis task can be carried out more successfully byreference frame are characterized by the index e),controlling the q component of the stator currentthe q component of the rotor flux is always zeroie
qs; if the rotor flux linkage Ye
dris not disturbed, the
Yeqr=Lm ie
qs+L∞r ieqr=0 air gap torque can be independently adjusted by ieqs
without delay.HenceIf Ye
qr¬0, the voltage equation for the q axis of the
rotor winding without any applied voltages (ueqr=0)ie
qr=−LmL∞r
ieqs (17)
reduces to
WithYeqr=0 the expression (16) for the air gap torque
ueqr=(ve−vr)Yedr+rr ieqr=0 (22)reduces to
mE=−32ppYedr ieqr (18) Inserting equation (17) into equation (22) yields the
following control conditionSubstituting the current ieqr
using equation (17),equation (18) can be written in the desired form
ve=vr+rrLm
L∞r
ieqsYedr=vr+v2 (23)
mE=3
2pp
LmL∞rYedr ieqs (19)
Equation (23) determines the angular velocity of thewhich shows that the air gap torque can be con- q–d–0 reference frame, so that alignment of the dtrolled by adjusting either the q component of the axis with the rotor field takes place and thereforestator current or the rotor flux linkage.
Yeqr¬0 is dynamically guaranteed.
Since for asynchronous machines there are no The discussed field-oriented control scheme is anvoltages applied to the rotor windings, then ue
dr=0. effective approach for decoupling the non-linear
Taking Yeqr=0 into account the voltage equation for multivariable system of equations of an asynchronous
the d axis of the rotor reduces to machine. The aim of the control strategy is to keepthe rotor flux Ye
dras exactly as possible through
uedr=
dYedr
dt+rr iedr=0 (20) adjusting the d component of the stator current ie
dsand to control the air gap torque by adjusting the q
Inserting the flux linkage equation component of the stator current ieqs
as well as theangular velocity v
e. If a desired rotor fluxYe*
dris given,
iedr=Yedr−Lm ie
dsL∞r
the required d component of the stator current ie*ds
can be determined in accordance with equation (21)by
ie*ds=
L∞rrrLm
dYe*dr
dt+
1
LmYe*dr (24)
To generate the desired air gap torque m*E
therequired q component of the stator current ie*
qscan
be calculated according to equation (19) as follows
ie*qs=
2
3
1
pp
L∞rLm
m*EYe*dr
(25)Fig. 8 q-d-0 reference frame by rotor field orientation
JSCE96 © IMechE 2006Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

9Electromechanical steering system in full vehicle models
From equation (23) the following expression yields system is necessary in practical applications. In sucha field-oriented control scheme the response speedof the electrical machine is limited in principle onlyv*e=vr+
rrLmL∞r
ie*qsYe*dr=vr+v*
2(26)
by the delay of the current regulation.
The rotation angle h*e
which determines the fieldorientation will be obtained by numerical integrationof the angular velocity v*
e. This angle is used to 4 RESULTS
transform the quantities from the q–d–0 to the a–b–creference frame. In order to test and demonstrate the dynamical
behaviour of the developed model and controlIn this research work a controlled stator currentsupply is employed. The stator current components scheme for the electromechanical steering system, a
set of full vehicle simulations is carried out. Someie*as
, ie*bs
, and ie*cs
are realized by voltage supply withadditional current regulations. numerical results, obtained by the simulation pro-
gram alaska, are shown in Fig. 10. In detail, an ISOThe block diagram of the control concept for theelectromechanical steering system is shown in Fig. 9. lane change and a sinusoidal steering manoeuvre at
standstill have been simulated.The desired value of the rotor flux is matched to themechanical angular velocity of the rotor and is weak- The results demonstrate that the desired support
torque can be generated by the electrical machine inened beyond the base speed. Due to the physicallimitations of power switches this field-weakening a sufficiently exact manner. A complete and correct
Fig. 9 Control block diagram of the electromechanical steering system
Fig. 10 Simulation results of the electromechanical steering system
JSCE96 © IMechE 2006 Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

10 Y Du, M A Lion, and P Maißer
8 Maißer, P. and Steigenberger, J. Zugang zur Theoriedescription of all interactions between the mechanicalelektromechanischer Systeme mittels klassischerand electrical subsystems of the steering systemMechanik, Teil 1: Elektrische Systeme in Ladungs-has been achieved through a uniform modellingformulierung. Wiss. Z. TH Ilmenau, 1974, 20(6),
technique of the whole system. 105–123.9 Maißer, P. Ein Beitrag zur Theorie diskreter elektro-
mechanischer Systeme mit Anwendungen in derManipulator-/Robotertechnik, Dissertation B, Tech-5 SUMMARYnische Hochschule Ilmenau.
10 Oertel, Ch., Eichler, M., and Fandre, A. RMOD-KIn this research work, an electromechanical steering6.0 Manual, 1999 (Gedas GmbH).system is modelled on the basis of a uniform theory
11 Eichler, E. A ride comfort tyre model for vibrationfor discrete electromechanical systems. To control anaylsis in full vehicle simulations. In Tyre modelsthe electrical machine in this steering system, a field- for vehicle dynamic analysis (Eds F. Bohm andoriented control scheme is applied. For the purpose H. P. Willumeit) Supplement to Vehicle System
Dynamics, 1997, 27, 109–122.of validating and testing the electromechanical steer-12 Eichler, M. and Lion, A. Gesamtfahrzeug-ing system, it is implemented in a multibody full
simulationen auf Prufstrecken zur Bestimmung vonvehicle model. To this end, an ISO lane change andLastkollektiven. In Berechnung und Simulation ima standstill steering manoeuvre have been simulated.Fahrzeugbau, 2000, Vol. 1559, pp. 369–398 (VDI-
The numerical results show that the electrical Berichte).machine generates the desired support torque with 13 Lion, A. Ein Kurs- und Geschwindigkeitsregler furexcellent accuracy. Based on this conceptual work EVP-Gesamtfahrzeugsimulationen mit dem Pro-the investigation of other interesting steering con- grammsystem ADAMS/CAR. Volkswagen report,
2003.cepts is possible (e.g. a variable steering gear ratio,14 Maißer, P. and Jungnickel, U. Stability of con-vehicle dynamics control with active steering, etc.).
trolled motion of a gymnast in high-speed mid airSuch an electromechanical steering system may alsomaneuvers. In Proceedings of IUTAM Symposiumserve as a basis for the implementation of steer byon Recent Developments in Non-linear Oscillations
wire functionalities. of Mechanical Systems, Hanoi, Vietnam, 1999,pp. 121–129.
15 Muller, G. Elektrische Maschinen – Betriebsverhaltenrotierender elektrischer Maschinen, 1984 (VDE-Verlag,REFERENCESBerlin/Offenbach, Germany).
16 Leonhard, W. Control of electrical drives, 2nd1 Foth, J., Gazyakan, U., Dominke, P., and Ruck, G.edition, 1996 (Springer-Verlag, Berlin).Steering systems for future requirements. In
17 Schroder, D. Elektrische Antriebe – Regelung vonEuropean Automotive Congress (EAEC7), Barcelona,Antriebssystemen, 2. Auflage, 2001 (Springer-Verlag,Spain, 1999.Berlin).2 Badawy, A., Zuraski, J., Bolourchi, F., and Chandy, A.
18 Ong, C. M. Dynamic simulation of electric machinery,Modeling and analysis of an electric power steering1998 (Prentice-Hall PTR, Upper Saddle River, Newsystem. SAE technical paper series 1999-01-0399,Jersey).1999.
3 Kozaki, Y., Hirose, G., Sekiya, S., and Miyaura, Y.Electric power steering (EPS). Motion and Control,1999, 6, 9–15.
APPENDIX4 Kwasny, O. and Manz, H. Die elektromechanischeLenkung des VW Touran. ATZ, 2005, 105(5), 464–470.
Notation5 Maißer, P., Enge, O., Freudenberg, H., and Kielau, G.Electromechanical interactions in multibody systems
A fundamental loop matrixcontaining electromechanical drives. MultibodyC matrix of the generalized capacitancesSystems Dynamics, 1997, 1(3), 281–302.e
nlocal normal vector of the target trace6 Enge, O., Kielau, G., and Maißer, P. Modelling and
simulation of discrete electromechanical systems. In et
local tangent vector of the target traceProceedings of the Third Conference on Mechatronics e
Vpreview vector of the trace controller
and Robotics: From Design Methods to Industrial ex
longitudinal axis of the vehicleApplications (Ed. J. Luckel), 1995, pp. 302–318 G vector of the generalized gyroscopic/(Teubner, Stuttgart, Germany).
Coriolis voltages7 Maißer, P. and Steigenberger, J. Lagrange-i gear ratioFormalismus fur diskrete elektromechanischei
lkcurrent in a fundamental loopSysteme. Z. Angew. Mathematik und Mechanik,
1979, 59, 717–730. k gain factor
JSCE96 © IMechE 2006Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830

11Electromechanical steering system in full vehicle models
K vector of the generalized gyroscopic/ Ql vector of the generalized applied forces(mechanical)Coriolis forces
L matrix of the generalized inductances Qm vector of the generalized applied forces(electrically caused)L
lrleakage inductance of the rotor winding
Lls
leakage inductance of the stator winding rr
Ohm’s resistance of the rotor windingr
sOhm’s resistance of the stator windingL
rmmutual inductance between two rotorwindings R matrix of the generalized resistances
s arc lengthLrr
self-inductance of the rotor windingL
smmutual inductance between two stator s
Vpreview distance of the trace controller
ulk
supply voltage in a fundamental loopwindingsL
srpeak value of the mutual inductance v velocity vector of the vehicle-fixed reference
pointbetween stator and rotor windingsL
ssself-inductance of the stator winding V vector of the generalized applied voltages
x: vector of the mechanical coordinatesmE
air gap torqueM generalized mass matrix
d lateral deviation of the trace controllerMA
drive torque of the power trainh
eelectrical angle of the stator fieldM
Esupport torque
hr
electrical angle of the rotorMH
hand torqueh
rmmechanical angle of the rotorM
Lentire steering torque
r local curvature radius of the target tracep number of polestQ
time constant of the trace controllerpp
number of pole pairsQ
ssteering wheel angleq: vector of the branch charges
y direction deviation of the trace controllerql vector of the mechanical generalizedY
lkflux linkage in a fundamental loopcoordinates
v electrical angular velocity of the q–d–0ql1
vector of the intrinsic coordinatesreference frameql
2vector of the external coordinates
ve
electrical angular velocity of the stator fieldqm vector of the electrical generalizedv
relectrical angular velocity of the rotorcoordinates
vrm
mechanical angular velocity of the rotorq0 vector of the charges of current sourcesQR vector of the generalized reaction forces v
2slip angular velocity of the rotor
JSCE96 © IMechE 2006 Proc. IMechE Vol. 220 Part I: J. Systems and Control Engineering
i000000096 02-02-06 15:37:07 Rev 14.05
The Charlesworth Group, Wakefield 01924 204830



![Design Luenberger Observer for an Electromechanical Actuator · 2018. 12. 21. · Luenberger Observer for Sensor Monitoring in Active Front Steering Systems can be found in [11]](https://img.pdfslide.us/doc/110x75/60dd732ee1b46834544d5cdf/design-luenberger-observer-for-an-electromechanical-actuator-2018-12-21-luenberger.jpg)