Embed Size (px)
Citation preview
ModellingModellingand and
Computer Animation of DaComputer Animation of Damage Stabilitymage Stability
K. Hasegawa, K. Ishibashi, Y. Yasuda
Presentation: Marcel van den Elst
Presentation OutlinePresentation Outline
– Historical background– damage stability issues– Osaka University and Strathclyde University joint res
earch on damage stability
– Mathematical Model– vectorial Equations of Motion for a damaged ship– scalar equations for sway, heave and roll– modelling the water ingress– residual stability and its calculation
– Simulation of a damaged ship– selected ship model and capsizing scenario– simulation results– steady states– possible explanation
– Computer animation of a damaged ship– animation software structure– animation software specifications– animation video
– Conclusions
– Damage stability issues– capsizing of Ro-Ro passenger ferries– prediction of (the effects of) water accumulation on bul
khead decks – both hydrostatic and hydrodynamic effects– need for simulations
– Osaka University and Strathclyde University– Hasegawa’s stay at Strathclyde in 1996 resulted in joi
nt research on damage stability– focus on model expansion, simulation and visualisatio
n of simulation results
Historical BackgroundHistorical Background
Mathematical ModelMathematical Model
– General vector Equations of Motion for a damaged ship
– Scalar equations for sway, heave and roll– Modelling the water ingress– Residual Stability and its calculation
Equations of MotionEquations of Motion
– General vector Equations of Motion for a damaged ship
Gwtwmdt
dGssmdt
dVVF )(
GwtwmGwdt
d
VdVsdt
dVxVxM )(0
– Damaged ship with progressive flooding– can be regarded as a single dynamic system– 3 dominant motions in beam seas are considered:
sway, heave and roll
– Radiation and Diffraction forces– calculated based on Ursell and Tasai method for sec
tional Lewis forms in still water
– Froude-Krylov forces– calculated based on the Hamamoto method to accou
nt for variations of hull submersion in waves
currentY
DriftY
FKY
yvdxxyn
dxlxyndxxyn
yvdxxymdxlxymdxxym
Y
y
dzL
L
n
L
y
dzLL
n
L
0
2/
0
2/
)(
)( )(
)( )( )(
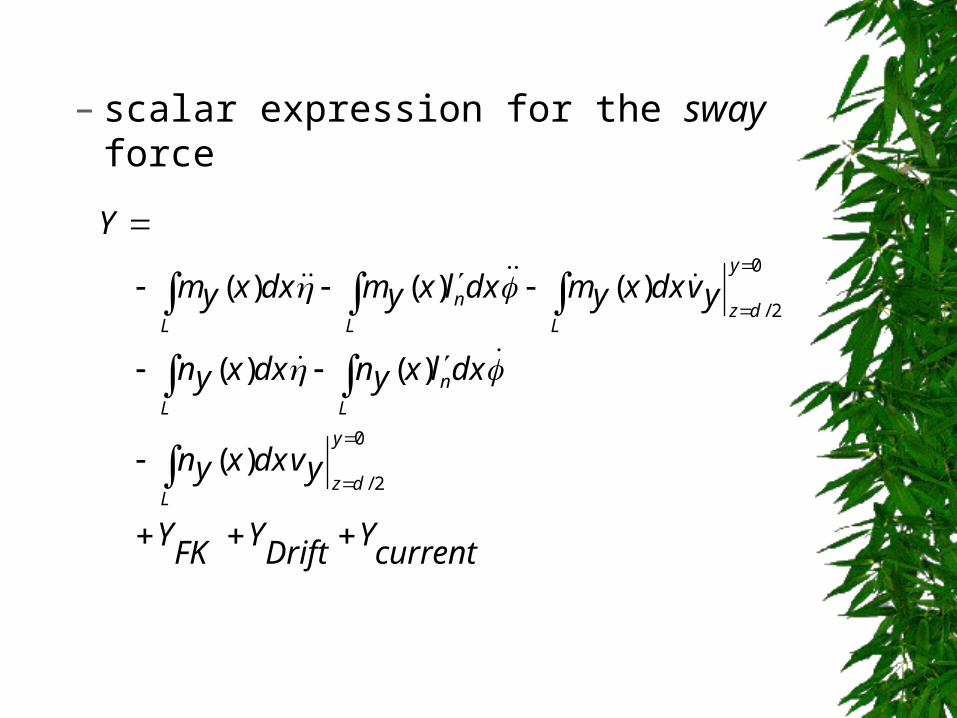
– scalar expression for the sway force
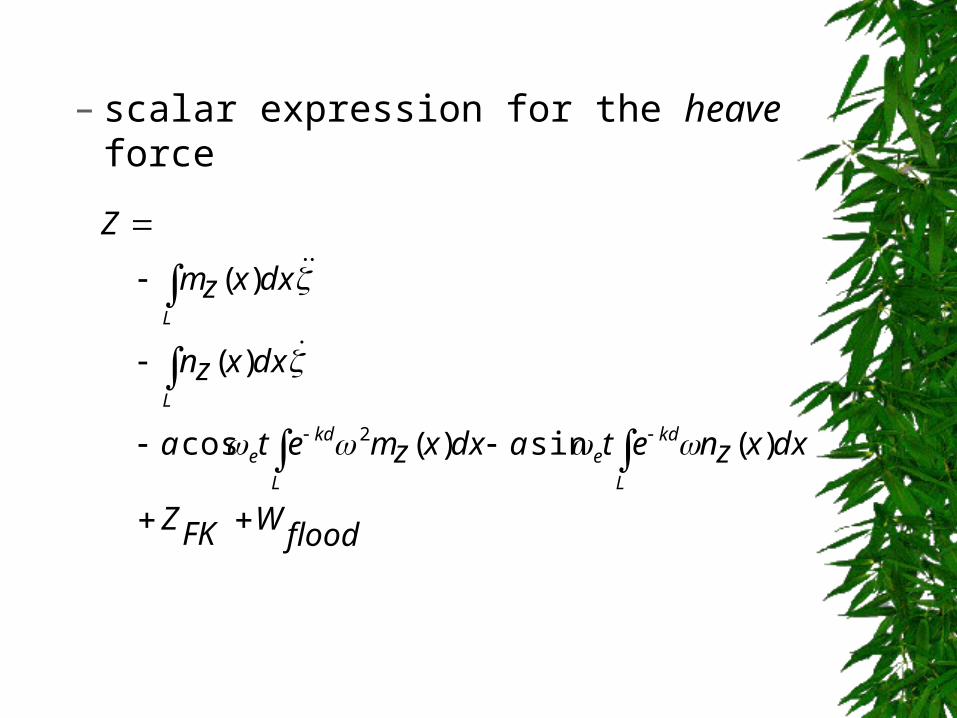
– scalar expression for the heave force
floodWFKZ
dxxznetadxxzmeta
dxxzn
dxxzm
Z
L
kde
L
kde
L
L
)(sin)(cos
)(
)(
2
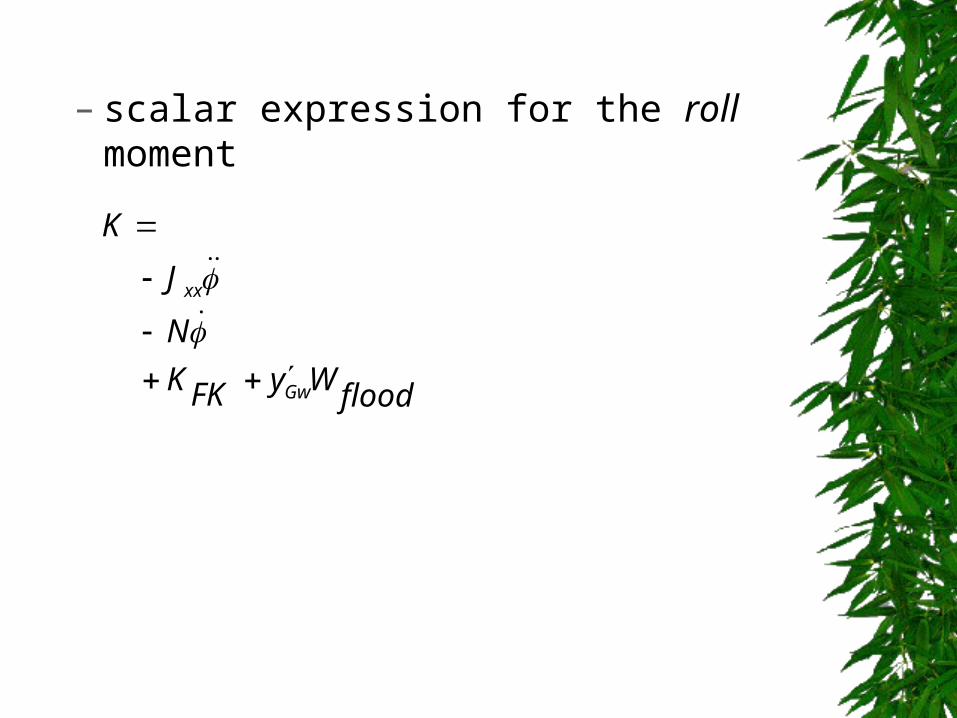
– scalar expression for the roll moment
floodWyFKK
N
J
K
Gw
xx
Water IngressWater Ingress
– water ingress influenced by configuration of the opening area, position of the opening area, wave condition, etc.
– CFD techniques not yet well enough developed to describe such a highly complex phenomenon
– Vassalos e.a. proposed a simplified method based on interior and exterior water level difference, with complexities concentrated in flooding coefficient K
dAinhouthginhouthsignKwmDamage 2)(
Residual StabilityResidual Stability
– static stability affected by flooding– important because it is used as a standard
in stability regulations– calculated using an added mass method
floodship
floodGwBGGBDamage WW
WyyyyGZ
– center of each section of the ship hull calculated by the Hamamoto method
– considers heave and pitch in balance so that
– heave displacement and pitch angle calculated numerically using the Newton-Raphson method
0FloodWWFKZ
0FloodWGwxFKM
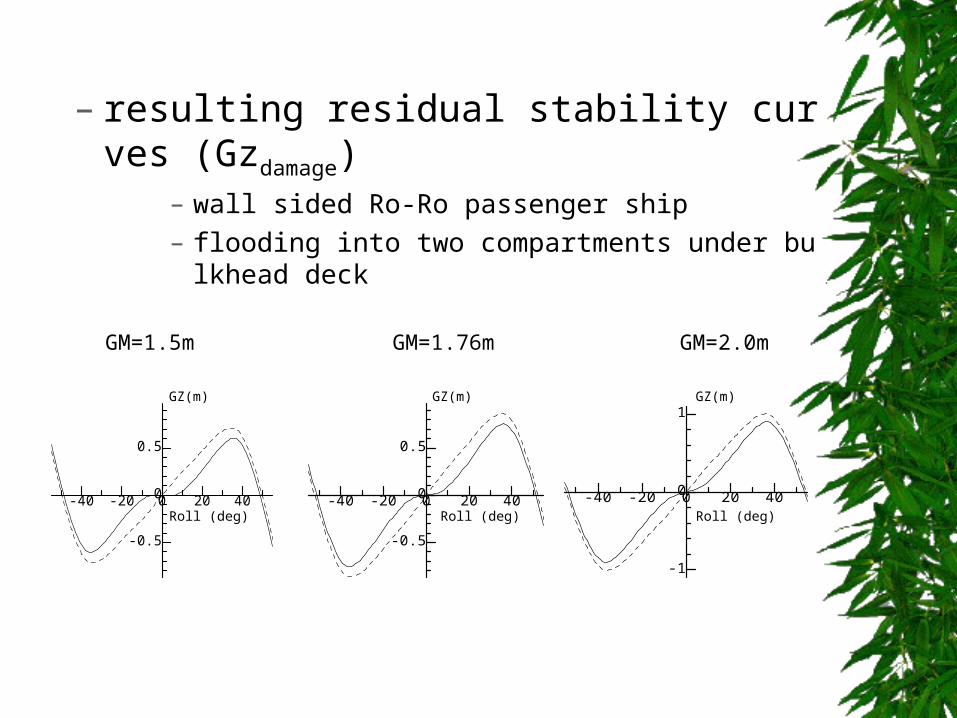
– resulting residual stability curves (Gzdamage)– wall sided Ro-Ro passenger ship – flooding into two compartments under bulkhead deck
GM=1.5m GM=1.76m GM=2.0m
-40 -20 0 20 40
-0.5
0
0.5
GZ(m)
Roll (deg)-40 -20 0 20 40
-0.5
0
0.5
GZ(m)
Roll (deg)-40 -20 0 20 40
-1
0
1GZ(m)
Roll (deg)
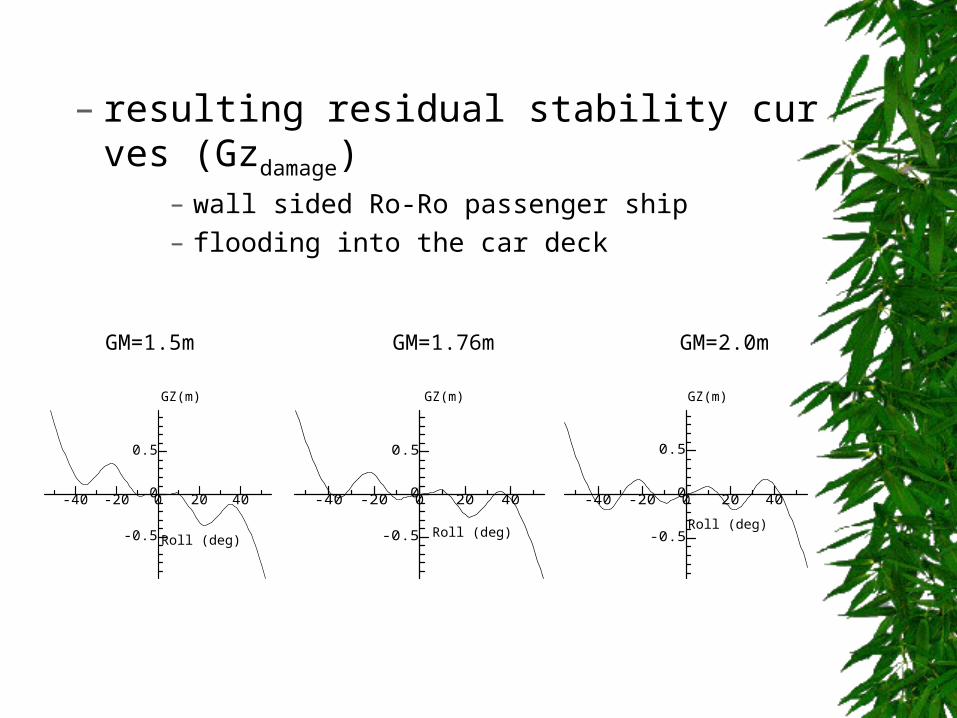
– resulting residual stability curves (Gzdamage)– wall sided Ro-Ro passenger ship – flooding into the car deck
GM=1.5m GM=1.76m GM=2.0m
-40 -20 0 20 40
-0.5
0
0.5
GZ(m)
Roll (deg)
-40 -20 0 20 40
-0.5
0
0.5
GZ(m)
Roll (deg)
-40 -20 0 20 40
-0.5
0
0.5
GZ(m)
Roll (deg)
Simulation of a Damaged Simulation of a Damaged ShipShip
– ship model and capsizing scenario– simulation results– steady states– possible explanation
– Ship model and capsizing scenario
– a wall sided Ro-Ro passenger ship like the Estonia
– a capsizing scenario conform IMO regulations for ship safety:flooding occurring simultaneously into watertight compartments under the bulkhead deck and onto a car deck above the bulkhead deck
– different compartment layouts have been simulated to show general applicability of the method to ships other than Ro-Ro passenger ships
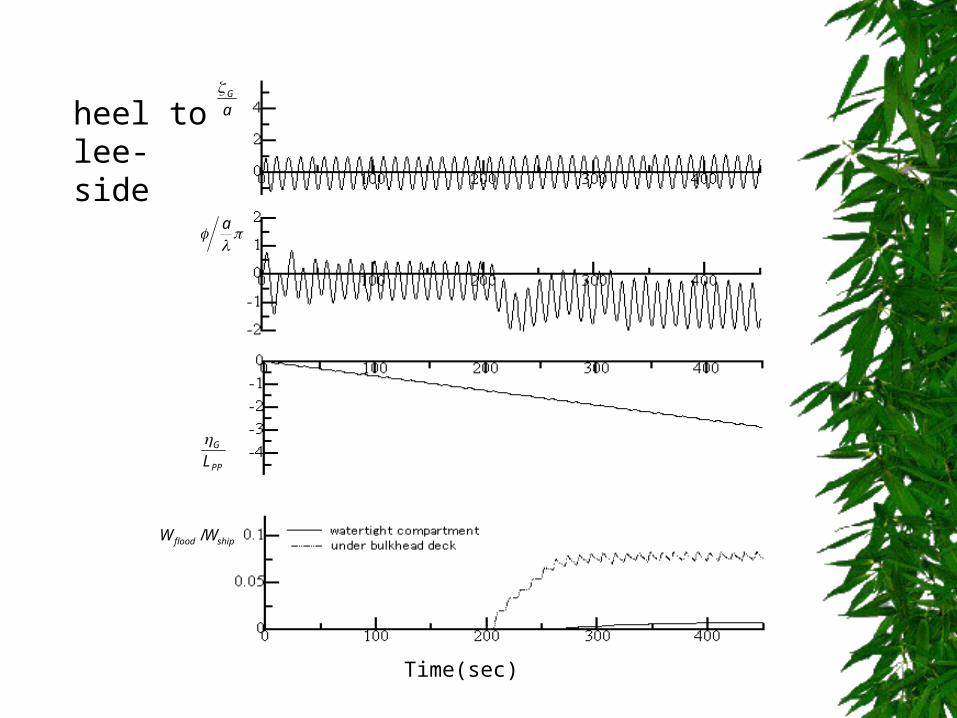
heel to lee-side
aG
a
PP
G
L
shipflood WW /
Time(sec)
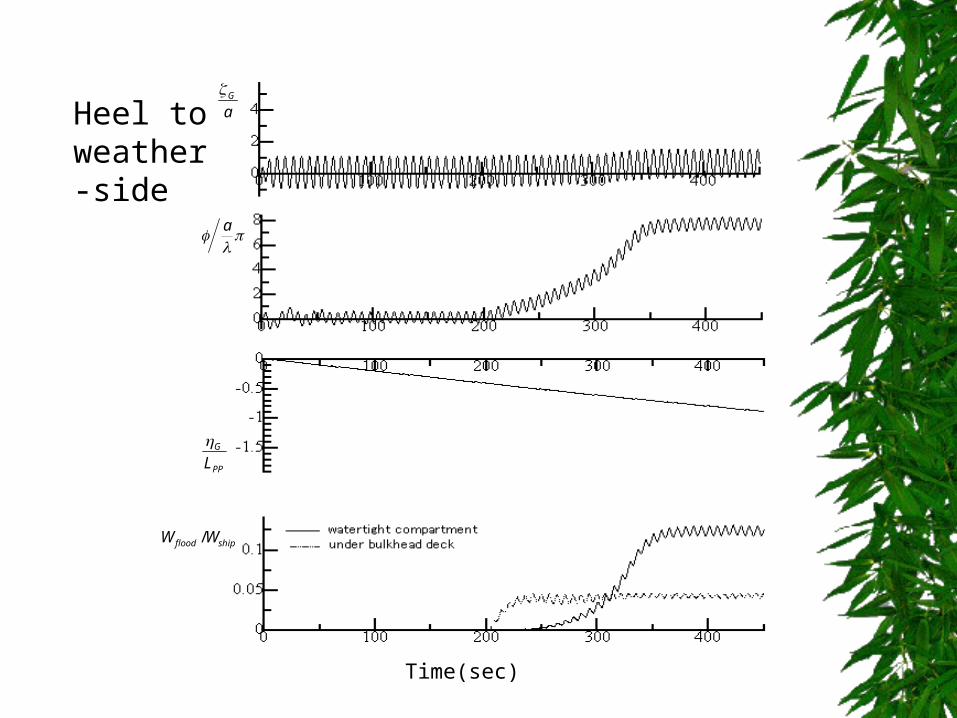
Heel to weather-side
aG
a
PP
G
L
shipflood WW /
Time(sec)
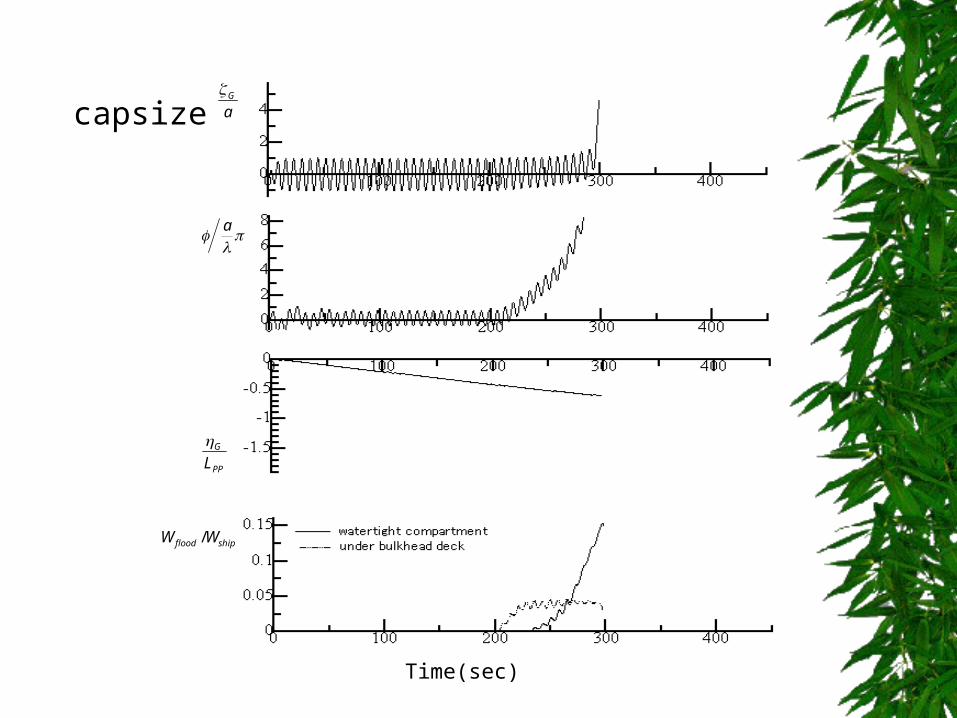
capsize aG
a
PP
G
L
shipflood WW /
Time(sec)
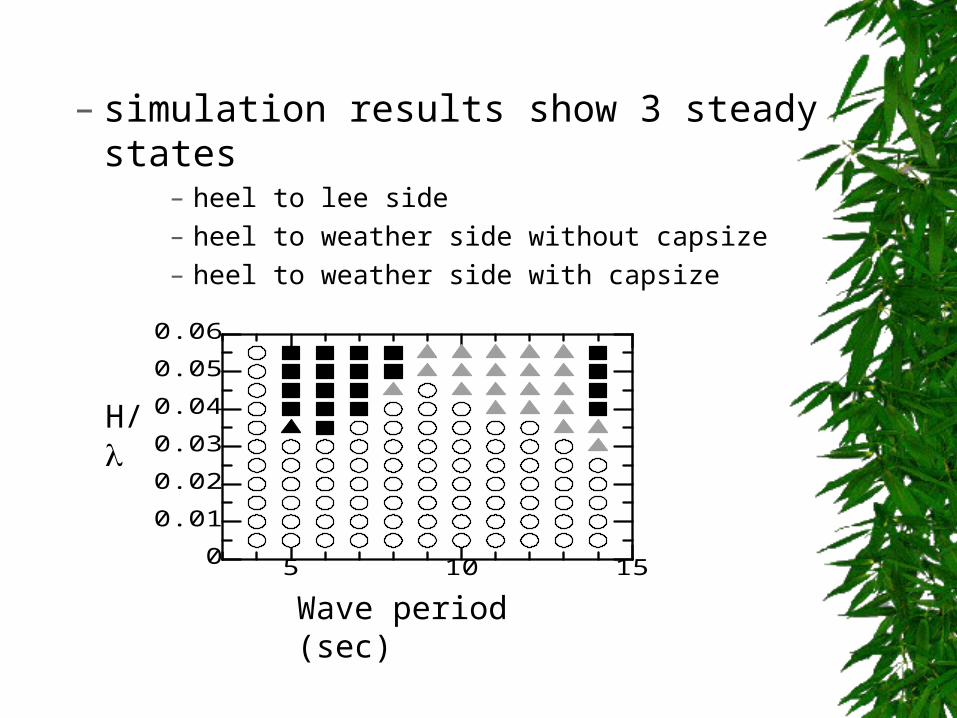
– simulation results show 3 steady states– heel to lee side– heel to weather side without capsize– heel to weather side with capsize
5 10 150
0.01
0.02
0.03
0.04
0.05
0.06
H/
Wave period (sec)
– possible explanation for these states to occur
heel to lee side– damage opening above water surface
heel to weather side resulting in capsizing– roll moment of the waves larger than the restoring
moment of the ship
heel to weather side without capsizing– heel moment of accumulated water in phase with the
moment of inclination of the ship– accumulated water level equals the wave surface
Computer AnimationComputer Animation
– important for qualitative understanding of the combined motions in case of flooding
– two programs produce time-series data for respectively wave and ship motion
– third program visualizes the scene– programmed in OpenInventor, a top layer on OpenG
L
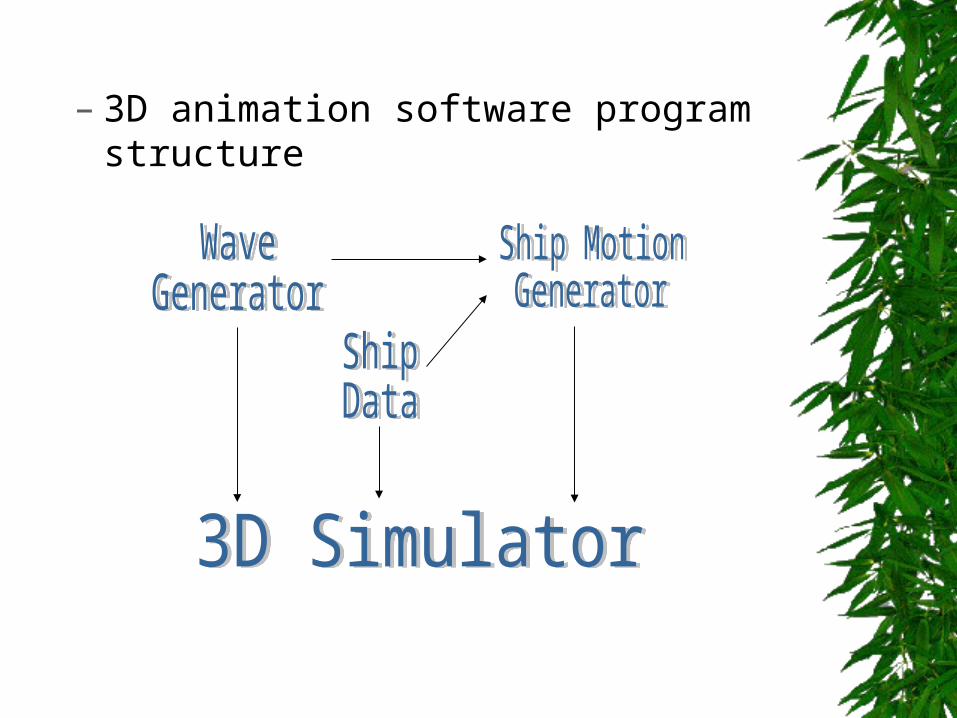
– 3D animation software program structure
– 3D animation simulator specifications
– simultaneously shows ship motions, waves, and accumulated water inside the flooded compartments
– video output at 10 frames/second– viewpoint and zoom can be adjusted freely with a
mouse during the animation to be able to view every part of the ship during the animation
3D Animation video3D Animation video
ConclusionsConclusions
– A mathematical model that accounts for large rolling motions of damaged (passenger) ships in waves has been realised and simulated
– Three steady state conditions of the damaged ship could be identified
– A 3D animation software tool has been implemented to visualise the simulations