Embed Size (px)
Citation preview

Research ArticleModeling of the Tail Slap for an Underwater Projectilewithin Supercavitation
Xuefeng Zhao 1 Xujian Lyu 12 and Da Li 1
1School of Energy and Power Engineering Nanjing University of Science and Technology Nanjing 210094 China2State Key Laboratory of Ocean Engineering Shanghai Jiao Tong University Shanghai 200240 China
Correspondence should be addressed to Xujian Lyu xjlyunjusteducn
Received 15 March 2019 Accepted 12 May 2019 Published 21 May 2019
Academic Editor Babak Shotorban
Copyright copy 2019 Xuefeng Zhao et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Detailed process of the tail slap for an underwater projectile in supercavitation is studied in this paper Firstly the horizontalequation of motion for the projectile and a dynamic model of the projectilersquos tail slap are introduced through a mathematicalderivation including a simple harmonic motion model of the projectile within the supercavitation layer and the tail slap reflectionmovement model inside the cavity Subsequently the MATLAB software package is used to model the projectilersquos motionCharacteristics for force from the projectile tail on the water layer during a single tail slap and the behavior of the projectilersquos angularmotion as well as the characteristics of projectile tail motion through multiple tail slaps are investigated It is found that the forcemagnitude of the water on the projectile tail decreases gradually while the relative motion angle of the projectile tail into the waterlayer and the contact time increase obviously as the projectile repeatedly slaps the cavity interface When the projectile velocitydecreases into a certain range ie less than 50 ms the contact time of the tail in the water layer increases dramatically and thesupercavitation can tend to collapse and lead to unstable projectile motion With increasing lateral deviation and angular velocityof the projectile tail the number of tail slaps and the angle of reflection both increase significantly In the case of supercavitationthe parameters of different tail slap points tend to be stable with time
1 Introduction
When an underwater vehicle moves within a certain speedhigh enough its surface pressure is lower than the saturatedvapor pressure of local water thus forming a cavity that cansurround nearly the entire projectile This phenomenon iscalled natural supercavitation [1 2] When supercavitationoccurs only a small part of the tip of the vehicle is in contactwith liquid water and the rest only contacts the vapor in thecavity In this case surface friction is greatly reduced whichcan ensure that the underwater vehicle can maintain highspeed efficiently greatly improving its performance [3 4]However since the cavity itself is inside the interface of liquidphase and gas phase the instability of this two-phase flow isobvious [5] Meanwhile the environmental pressure of thevehicle is affected by multiple external factors and there areproblems such as perturbation of hydrodynamic coefficientsand unknown interaction from wake flow [6] These furtheraffect the persistence of the cavity and the force on the vehicle
and greatly increase the complexity of the motion of thesupercavitation vehicle [7 8]
An underwater high-speed projectile is a typical super-cavitation vehicle Tail swing is very likely to occur when theunderwater high-speed projectile moves in the supercavita-tion cavity due to external disturbance or its own unstablecharacteristics [9] That is slaps occur between the tail andthe upper and lower walls of the cavity and the projectilebody attitude is corrected to maintain stability by these slapforces Rand [10] made a very valuable pioneering explo-ration on the tail slap dynamics analysis of supercavitatingprojectile Subsequently Zhao et al [11] researched tail slapphenomenon during projectile horizontal movement Theirwork included the influences of initial disturbance on tailslap motion the cavity shape and ballistic characteristics aswell as the tail slap motion characteristics of supercavitatingprojectiles with different center ofmass positions Li et al [12]studied the tail slap of supercavitation vehicles for differentmotion conditions and compared the effects of gravitational
HindawiMathematical Problems in EngineeringVolume 2019 Article ID 1290157 10 pageshttpsdoiorg10115520191290157
2 Mathematical Problems in Engineering
acceleration on tail slaps at different speeds Zhang [13] etal developed an improved method to obtain the length ofa projectile that was immersed in a cavity boundary Heet al [14] established the equations of motion for tail slapcoupling in supercavitation vehicles They studied the fluid-solid coupling response of the supercavitating projectile dur-ing the tail slap process and analyzed the influence of fluid-solid coupling on the attitude and dynamic characteristics ofthe projectile Zou et al [15] established an analysis modelof supercavitating projectile motion through the gas massconservation equation and studied factors such as gravity andangle of attack on the tail slap dynamics of a supercavitatingvehicle Mirzaei et al [16 17] established a nonlinear dynamicmodel to simulate the process of two-dimensional planarforce acting on the tail of a supercavitation vehicle Theyprovided an equation to model the case in which the tailof the high-speed supercavitating projectile slaps on thecavity wall surface and established an empirical model forpredicting the tail slap of the projectile Kulkarni et al[18] directly simulated the slaps of the projectile tail andcavity walls and predicted the behavior of slaps between theprojectilersquos tail and the cavity walls Zhao et al [19] establisheda computational fluid dynamics model under different initialdisturbances and studied the ballistic characteristics whentail slaps occur Zhang et al [20] investigated the tail-slaploads of supercavitating projectiles based on LogvinovichrsquosPrinciple They concluded that the impact duration increaseswhile frequency of impacts decreases as the slenderness ratioof projectiles increases
Tail slap has been extensively studied as a main stable orquasistable motionmodel for supercavitating bodies in waterThe motion characteristics of tail slap remain unclear dueto the instability of the two-phase flow of the supercavita-tion and the complexity of projectile motion in the cavityAlthough plenty of works have been carried out to study themotion characteristic of tail slap as stated above only minorof them are focused on the detailed process of the motion ofthe tail slaps which is always significant for the application ofa supercavitating projectile In view of this the characteristicsof projectile forward motion and tail slap motion are studiedthrough a simplified supercavitating projectile with bothsingle tail slap in the water layer and multiple tail slapsin the cavitation being taken into account A mathematicalmodel is introduced to demonstrate the tail slap process andinfluence of parameters including reflection angle impacttime and cavity radius on tail slaps is discussed Diagramsof tail slaps on various conditions are proposed to providea different perspective to sketch the motion of projectiles insupercavitation which may provide a reference for a betterunderstanding of the interesting tail slap phenomenon
2 Dynamic Model of Supercavitating Tail Slap
21 e Model of Forward Motion A supercavitating pro-jectile is affected by hydrodynamic force vapor force in thecavitation and external disturbances during movement Themovement is also closely related to the shape of the projectileand characteristics of the fluid medium The actual dynamic
characteristic of the projectile is very complicated Consider-ing that the supercavitating projectile is in horizontal motionthe following assumptions are made according to Rand [10]
(1) the effect of gravity on the trajectory of the projectilersquoscenter of mass is negligible
(2) the projectile is treated as a rigid body and its elasticdeformation is not taken into account
(3) in the process of projectile motion the projectile bodycan move forward steadily during the contact between thetail and the cavitation liquid-vapor interface regardless of theinfluence of vapor in the supercavitation
(4) the projectile nose is always located at the central lineof the cavity The projectile body swings around the nose anddoes not rotate around its own axis of symmetry during itsmotion
(5) the cavityrsquos shape is symmetrical with respect to thehorizontal line of motion of the projectile and the diameterof the cavity decreases with decreasing projectile velocityThe cavity radius at the tail end of the projectile is r It isgenerally acknowledged that the cavity radius for movingbody increases as the increase of velocity therefore a linearrelationship with the forward velocity of the projectileis introduced to simplify the prediction model of cavityradius
119903 () = C1 + C
2 (1)
where C1and C
2are undetermined coefficients These
coefficients are determined based on the given projectilevelocity and cavitation parameters (generally obtained fromsimulations or experiments)
In the above assumptions the motion of the super-cavitating projectile is simplified into a rigid body motionmodel containing only translation and oscillation When theprojectile tail is not in contact with the liquid its motionis modeled as translation in the x-direction and rotationabout the projectilersquos nose at a constant angular velocityas illustrated in Figure 1 The horizontal distance from thefixed launching datum to the center of mass is set as xand the projectile body is subject to drag force 119865
119863at its
nose A simplified model of supercavitating projectile motionis obtained according to these assumptions as shown inFigure 1
The displacement of the projectilersquos center of mass dueto small inclination angle 120572 is ignored The axis of theprojectile and cavity centerline coincides in the x-directionand the following equation can be obtained according to theexperimental results of May et al [21] and Newtonrsquos secondlaw
119898 = minus119865119863= minus121205881198602119896 cos2120572 (2)
where 120588 denotes the density of water A is the cross-sectionalarea of the nose is the forward speed as above is theacceleration m is the mass of the projectile and k is thedimensionless parameter (generally set as 09)
Mathematical Problems in Engineering 3
Launching datum
x
Water
Projectile
Cavitation-water interface
Cavitation
FD
Figure 1 Motion model of the supercavitating projectile
0 04 08 12 16 20
250
500
750
1000
1250
1500
Rands resultsPresent results
t (s)
x
(ms
)
(a)
0 04 08 12 16 2t (s)
050
100150200250300350400
Rands resultsPresent results
x(m
)
(b)
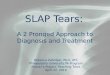
Figure 2 Plot of velocity and displacement for the horizontal motion of the supercavitating projectile and comparison to previous work
Setting 120576 = 1205881198601198962119898 when 120572 tends to be 0 the aboveequation can be turned into
lim120572997888rarr0
minus119865119863119898 = lim120572997888rarr0
minus1205881198601198962119898 2cos2120572 = lim120572997888rarr0
minus 120576 1199092cos2120572= minus1205762
(3)
From (3) we find
119909 = minus1205762 (4)
where 119909 = d119909d119905 Letting 1199090denote the initial velocity of the
projectile the following equations can be obtained by solvingthe differential equation to give
119909 (119905) = 1120576 In (1 + 1205760119905) (5)
(119905) = 01 + 1205760119905 (6)
By substituting (6) into (1) we get
119903 (119905) = C1
01 + 1205760119905 + C2 (7)
For the above mathematical model the initial conditionsfor homogeneous projectile are given as follows [10] theprojectile length is L = 012 m the projectile mass is 015 kgthe projectile tail diameter is D = 0015 m the nose diameteris 1198630 = 0002 m the taper angle of nose is 25∘ and the
corresponding cross-sectional area is A = 314159times10minus6 m2the distance from the tail of the projectile to its center ofmass is a = 005577 m and the moment of inertia of theprojectile about its center of mass is I = 0000777 kg m2Suppose that the initial velocity of the projectile is 119909
0=1500ms with the diameter of the cavity at the projectile
tail being r = 005 m and = 100ms with r = 003 mAccording to (1) C
1= 00001429 and C
2= 002857 ie 119903() =000001429 119909 + 002857 The MATLAB software package is
used to simulate forward motion of the projectile and resultsfor velocity and displacement versus time are demonstratedin Figure 2 It is found that the present results are in goodagreement with that got fromRand [10] as shown in Figure 2The projectilersquos velocity rapidly drops from 1500 ms to 3919ms within the first 02 s during which the displacement ofthe projectile is 1425 m Then the velocity slowly decreasesand the displacement slowly increases reaching 512 ms and3583 m at 2 s respectively In general the minimum speedrange required for the projectile tomaintain a supercavitation(ie cavitation number 120590 le 01) is about 40sim50 ms sothat the projectile may lose stability after 2 s of motiondue to the collapse of supercavitation its subsequent motioncharacteristics at lower velocity are beyond the scope of thisarticle
22 Modeling Tail Slap Motion Based on the abovemen-tioned forward motion model for the projectile motioncharacteristics of its tail slap will be discussed next When theforward motion is disturbed by a random and instantaneousperturbation from surroundings or the cavitationrsquos instability
4 Mathematical Problems in Engineering
WaterProjectile
Caviation-water interface
FD
RL
RD
Figure 3The forces acting on the projectile during a single tail slap
the projectile is modeled as a rigid body whose nose is fixedand the tail swings around the nose based on previous Thetail will slap repeatedly on the supercavity interface aroundthe projectile and a single tail slap is taken into account tostudy the slap details firstly
If 120575 indicates the maximum distance that the projectiletail immersed into thewater layer through the cavity interfaceduring slap (Figure 3) then
120575 = 119871 sin 120572 + 1198632 cos 120572 minus 119903 (8)
where L is the length of the moving body and D is thediameter of the projectile tail
According to the above model thickness of the waterlayer disturbed by the projectile is defined as 120582120575 (where120582 is a coefficient less than 1) and the cross-sectional areaof fluid layer is written as A
1= 120582120575sdotD The longitudinal and
lateral forces of the cavity boundary acting on the projectiletail are RD and RL respectively as shown in Figure 3 Thefollowing equations can be obtained due to the conservationof momentum
119877119863= 12058811986012 (1 minus cos 120572) (9)
119877119871= 12058811986012 sin 120572 (10)
Then the swing of the projectile body around the nosesatisfies the following equation
119868 = minus119877119863119886 sin 120572 minus 119877119871119886 cos 120572 (11)
When 120572 is small sin120572 can be approximated as 120572 and cos 120572as 1 By substituting (9) and (10) into (11) we get
119868 + 120588120582 [119871120572 + 1198632 minus 119903 ()]1198631198862120572 = 0 (12)
LetΦ be the relative movement angle of the projectile tailslap then we have Φ = 120572 minus [2119903() minus 119863]2119871 gt 0 Eq (12) canbe written as
119868Φ + 1205881205821198631198862Φ2 + 1205881205821198631198862 [119903 () minus 1198632 ]Φ = 0 (13)
If the slap time is shortΦ is small and 119903() can be seen asconstant Neglecting the termwithΦ2 of (13) we can simplifythe equation and end up with
Φ + 12059620Φ = 0 (14)
where 12059620= (1205881205821198631198862119868)[119903() minus 1198632]
The equation represents a process of the moment whenΦ is 0 (the initial slap point of the tail passes through thecavitation wall and into the water layer) to the momentwhen Φ again crosses 0 (the initial slap point of the tailpasses back into the cavitation bubble and exits the waterlayer) Therefore the duration of the slap is half of the simpleharmonic vibration period that is Δ119879 = 1198792 = 120587120596
0
Through solving the above simple harmonic equations thereis
Φ = 1198600cos (120596
0119905 + 120593) (15)
where 1198600= 120596119871120596
0is the amplitude of the simple harmonic
vibration of the projectile in the water layer and 120593 = minus1205872 isthe initial phase of the simple harmonic vibration
The forces on the projectile in the water layer can then beexpressed as
119865 = minus119871119898119860012059620 cos (1205960119905 + 120593) (16)
Based on the kinetic model and the above analysis it isassumed that each tail slap of the supercavitating projectileis an instantaneous dynamic process and that the angularvelocity is constant and the slap reflection angle is equalto the incident angle before and after a single tail slap Letus define that the initial position of the projectile tail islocated at the center line of the cavitation offset Δx (initiallateral deviation) and swings upward with the nose at thecenter According to the change of the cavitation cavitysize with time the location of the next slap point can bepredicted Therefore the movement of the projectile tailin the supercavitation is essentially a slap problem withshrinking boundary (Figure 4) The parameters of the firstslap point are given 120596 is the angular velocity of the projectilebody around the nose (the angular velocity of the tail slap)
Mathematical Problems in Engineering 5
O
Centrality of Cavity
Outer Boundary at First Impact Point
Outer Boundary at Second Impact Point
AB
The Second Impact Point
Symmetric Position of the First Impact Point
D
The First Impact Point
E
C
F
Initial Position
G
1
1 1
2L
L
r1
r1
r2
Δx
Figure 4 Sketch of tail slap looking from behind the projectile
1205791is the incident angle 119905
1is the time from the initial point to
the first slap point and 1199031is the cavitation radius of the slap
point Then there is 1199031
1015840 = 1199031minus 1198632 so that
1205791= arctan d119909120596119871119905
1
1199051= radic(119903
1minus 1198632)2 minus d1199092120596119871
1199031= radicd1199092 + (120596119871119905
1)2 + 1198632
(17)
As shown in Figure 4 1205791is the angle between the center
of the circle E at the symmetric position of the first slap pointand the line OE at the center O of the cavity and the directionline EF at the first slap point From the first slap point to thesecond slap point the projectilersquos motion in the cavity is dueto slaps between the projectile tail and the cavity boundaryWhen the projectile moves towards the second slap point thecavity at the first slap point shrinks from E point along theEO direction The cavity and projectile intersect at point Aand the central position of the projectile tail is point B In thedirection of the EF line the following can be obtained
(1199031minus 1198632 ) cos 1205791minus radic(119903
2minus 1198632 )
2 minus [(1199031minus 1198632 ) sin 1205791]
2
+ 120596119871 (1199052minus 1199051) = 2 (119903
1minus 1198632 ) cos 1205791
(18)
By analogy the relationship between the nth slap and the(n+1)th slap is
(119903119899minus 1198632 ) cos 120579119899minus radic(119903119899+1 minus 1198632 )
2 minus [(119903119899 minus 1198632 ) sin 120579119899]2
+ 120596119871 (119905119899+1
minus 119905119899) = 2 (119903
119899minus 1198632 ) cos 120579119899
(19)
According to the iteration of the above equation thecavitation radius and the tail slap reflection angle at theoccurrence of the (n+1)th tail slap are as follows
119903119899+1 = C101 + 1205760119905119899+1
+ C2
120579119899+1
= arcsin((119903119899 minus 1198632) sin 120579119899(119903119899+1
minus 1198632) )(20)
By obtaining the above parameters the state change of theprojectile when the tail swings in the supercavitation can beobtained
3 Results and Discussion
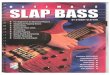
Figure 5 shows the curves of force and relative motion anglefor projectile tail in water layer with time during repeatedtail slaps composed of multiple single tail slaps The forceamplitude of the projectile tail in harmonic motion in thewater layer decreases with the continuous occurrence of thetail slap and the attenuation trend gradually decreases withtime Among them the force amplitude of the first tail slapis 10 N while that of the second tail slap decreases to about4 N decreasing by 60 The relative motion angle whichdemonstrates the amplitude of the projectile tail in the water
6 Mathematical Problems in Engineering
0 04 08 12 16 2minus12
minus9
minus6
minus3
0
0515 052minus3
minus2
minus1
0
F (N
)
F (N
)
t (s)
t (s)
(a)
0 04 08 12 16 2t (s)
009
0045
minus0045
0
minus009
Φ(∘
)
(b)
Figure 5 Variation of the force and relative motion angle of projectile during tail slap in water layer with times
0300600900120015000
0005
001
0015
002
x (ms)
ΔT
(s)
(a)
0 40 80 120 160 200 240 280 320 360 4000
0005
001
0015
002
x (m)
ΔT
(s)
(b)
Figure 6 Variation curve of contact time between a projectile and the liquid velocity and horizontal displacement during projectile tail slap
layer increases with the increase of the number of tail slapsas shown in Figure 5(b) However the maximum swingamplitude in 2 s is about 008∘ which is far less than theabsolute swing angle 120572 of the projectile (generally 120572 gt 14∘)Figure 6 shows the variation of the contact time of the singletail slaps of the projectile in the cavity layer with the center ofmass velocity and themoving distance of the projectile within2 s With the continuous occurrence of the tail slaps thecontact time of the projectile with the water layer graduallyincreases from less than 0004 s When forward speed of theprojectile is lower than 250 ms the contact time rapidlyincreases to 0018 s but it is still far less than the tail slapinterval (about 018 s) Within 0018 s the relative changein the radius of the supercavitation around the projectile is003 that is the previous assumption of regarding 119903() as aconstant in the above single tail slap is reasonable When thecontact time of the projectile tail in the water layer continuesto increase dramatically (tgt 2 s) the corresponding projectilevelocity decreases to about 512 ms That is supercavitationwill eventually collapse and projectile motion instability mayoccur
MATLAB is further used to simulate the whole processof projectile tail slap movement through a 2 s time intervalThe specific working conditions and corresponding tail slapfrequency are shown in Table 1 Figures 7 and 8 show theschematic diagram of projectile tail motion relative to thecentral axis of the cavity at different angular velocities (120596 =1 2 rads) and different initial lateral deviation conditions
(Δx = 001 m 002 m) respectively Under the same initialside deviation Δx the number of tail slaps increases with theincrease of angular velocity 120596 and the effect of cavitationsuperposition gradually becomes obvious as shown in Fig-ure 7 When the angular velocity 120596 of tail slap is constantthe number of tail slaps increases as Δx increases (Table 1)and the tail slap trajectory is closer to the cavitation bubblewall
Table 2 shows the variation of cavitation radius 119903n tail slapreflection angle 120579n and tail slap occurrence time 119905n undertypical conditions (Δx = 001 m 120596 = 2 rads) During thetail slap sequence from 0 to 2s the cavity radius decreasesand the rate of speed loss decreases as the projectile movesforward and the tail slap occurs The radius decreases from00368 m for the first slap to 00324 m for the second slapThe cavitation radius of the 5th tail slap is 00302 m whilethe cavitation radius from the 6th to the 11th is stable ataround 0029mThe reflection angle gradually increases withthe continued tail slaps and the increasing trend decreasesconstantly which is basically consistent with the trend of thecavitation radiusThe time interval between two adjacent tailslaps also decreases slowly from 02096 s which is about01777 s between the 10th and 11th tail slaps that is the timeinterval between tail slaps is generally stable in the range of017 s to 021 s
Figure 9 shows the cavitation shrinkage curve and dia-gram of the tail slap process with different tail slap angularvelocities (120596 = 1 2 3 rads) and different initial lateral
Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
acceleration on tail slaps at different speeds Zhang [13] etal developed an improved method to obtain the length ofa projectile that was immersed in a cavity boundary Heet al [14] established the equations of motion for tail slapcoupling in supercavitation vehicles They studied the fluid-solid coupling response of the supercavitating projectile dur-ing the tail slap process and analyzed the influence of fluid-solid coupling on the attitude and dynamic characteristics ofthe projectile Zou et al [15] established an analysis modelof supercavitating projectile motion through the gas massconservation equation and studied factors such as gravity andangle of attack on the tail slap dynamics of a supercavitatingvehicle Mirzaei et al [16 17] established a nonlinear dynamicmodel to simulate the process of two-dimensional planarforce acting on the tail of a supercavitation vehicle Theyprovided an equation to model the case in which the tailof the high-speed supercavitating projectile slaps on thecavity wall surface and established an empirical model forpredicting the tail slap of the projectile Kulkarni et al[18] directly simulated the slaps of the projectile tail andcavity walls and predicted the behavior of slaps between theprojectilersquos tail and the cavity walls Zhao et al [19] establisheda computational fluid dynamics model under different initialdisturbances and studied the ballistic characteristics whentail slaps occur Zhang et al [20] investigated the tail-slaploads of supercavitating projectiles based on LogvinovichrsquosPrinciple They concluded that the impact duration increaseswhile frequency of impacts decreases as the slenderness ratioof projectiles increases
Tail slap has been extensively studied as a main stable orquasistable motionmodel for supercavitating bodies in waterThe motion characteristics of tail slap remain unclear dueto the instability of the two-phase flow of the supercavita-tion and the complexity of projectile motion in the cavityAlthough plenty of works have been carried out to study themotion characteristic of tail slap as stated above only minorof them are focused on the detailed process of the motion ofthe tail slaps which is always significant for the application ofa supercavitating projectile In view of this the characteristicsof projectile forward motion and tail slap motion are studiedthrough a simplified supercavitating projectile with bothsingle tail slap in the water layer and multiple tail slapsin the cavitation being taken into account A mathematicalmodel is introduced to demonstrate the tail slap process andinfluence of parameters including reflection angle impacttime and cavity radius on tail slaps is discussed Diagramsof tail slaps on various conditions are proposed to providea different perspective to sketch the motion of projectiles insupercavitation which may provide a reference for a betterunderstanding of the interesting tail slap phenomenon
2 Dynamic Model of Supercavitating Tail Slap
21 e Model of Forward Motion A supercavitating pro-jectile is affected by hydrodynamic force vapor force in thecavitation and external disturbances during movement Themovement is also closely related to the shape of the projectileand characteristics of the fluid medium The actual dynamic
characteristic of the projectile is very complicated Consider-ing that the supercavitating projectile is in horizontal motionthe following assumptions are made according to Rand [10]
(1) the effect of gravity on the trajectory of the projectilersquoscenter of mass is negligible
(2) the projectile is treated as a rigid body and its elasticdeformation is not taken into account
(3) in the process of projectile motion the projectile bodycan move forward steadily during the contact between thetail and the cavitation liquid-vapor interface regardless of theinfluence of vapor in the supercavitation
(4) the projectile nose is always located at the central lineof the cavity The projectile body swings around the nose anddoes not rotate around its own axis of symmetry during itsmotion
(5) the cavityrsquos shape is symmetrical with respect to thehorizontal line of motion of the projectile and the diameterof the cavity decreases with decreasing projectile velocityThe cavity radius at the tail end of the projectile is r It isgenerally acknowledged that the cavity radius for movingbody increases as the increase of velocity therefore a linearrelationship with the forward velocity of the projectileis introduced to simplify the prediction model of cavityradius
119903 () = C1 + C
2 (1)
where C1and C
2are undetermined coefficients These
coefficients are determined based on the given projectilevelocity and cavitation parameters (generally obtained fromsimulations or experiments)
In the above assumptions the motion of the super-cavitating projectile is simplified into a rigid body motionmodel containing only translation and oscillation When theprojectile tail is not in contact with the liquid its motionis modeled as translation in the x-direction and rotationabout the projectilersquos nose at a constant angular velocityas illustrated in Figure 1 The horizontal distance from thefixed launching datum to the center of mass is set as xand the projectile body is subject to drag force 119865
119863at its
nose A simplified model of supercavitating projectile motionis obtained according to these assumptions as shown inFigure 1
The displacement of the projectilersquos center of mass dueto small inclination angle 120572 is ignored The axis of theprojectile and cavity centerline coincides in the x-directionand the following equation can be obtained according to theexperimental results of May et al [21] and Newtonrsquos secondlaw
119898 = minus119865119863= minus121205881198602119896 cos2120572 (2)
where 120588 denotes the density of water A is the cross-sectionalarea of the nose is the forward speed as above is theacceleration m is the mass of the projectile and k is thedimensionless parameter (generally set as 09)
Mathematical Problems in Engineering 3
Launching datum
x
Water
Projectile
Cavitation-water interface
Cavitation
FD
Figure 1 Motion model of the supercavitating projectile
0 04 08 12 16 20
250
500
750
1000
1250
1500
Rands resultsPresent results
t (s)
x
(ms
)
(a)
0 04 08 12 16 2t (s)
050
100150200250300350400
Rands resultsPresent results
x(m
)
(b)
Figure 2 Plot of velocity and displacement for the horizontal motion of the supercavitating projectile and comparison to previous work
Setting 120576 = 1205881198601198962119898 when 120572 tends to be 0 the aboveequation can be turned into
lim120572997888rarr0
minus119865119863119898 = lim120572997888rarr0
minus1205881198601198962119898 2cos2120572 = lim120572997888rarr0
minus 120576 1199092cos2120572= minus1205762
(3)
From (3) we find
119909 = minus1205762 (4)
where 119909 = d119909d119905 Letting 1199090denote the initial velocity of the
projectile the following equations can be obtained by solvingthe differential equation to give
119909 (119905) = 1120576 In (1 + 1205760119905) (5)
(119905) = 01 + 1205760119905 (6)
By substituting (6) into (1) we get
119903 (119905) = C1
01 + 1205760119905 + C2 (7)
For the above mathematical model the initial conditionsfor homogeneous projectile are given as follows [10] theprojectile length is L = 012 m the projectile mass is 015 kgthe projectile tail diameter is D = 0015 m the nose diameteris 1198630 = 0002 m the taper angle of nose is 25∘ and the
corresponding cross-sectional area is A = 314159times10minus6 m2the distance from the tail of the projectile to its center ofmass is a = 005577 m and the moment of inertia of theprojectile about its center of mass is I = 0000777 kg m2Suppose that the initial velocity of the projectile is 119909
0=1500ms with the diameter of the cavity at the projectile
tail being r = 005 m and = 100ms with r = 003 mAccording to (1) C
1= 00001429 and C
2= 002857 ie 119903() =000001429 119909 + 002857 The MATLAB software package is
used to simulate forward motion of the projectile and resultsfor velocity and displacement versus time are demonstratedin Figure 2 It is found that the present results are in goodagreement with that got fromRand [10] as shown in Figure 2The projectilersquos velocity rapidly drops from 1500 ms to 3919ms within the first 02 s during which the displacement ofthe projectile is 1425 m Then the velocity slowly decreasesand the displacement slowly increases reaching 512 ms and3583 m at 2 s respectively In general the minimum speedrange required for the projectile tomaintain a supercavitation(ie cavitation number 120590 le 01) is about 40sim50 ms sothat the projectile may lose stability after 2 s of motiondue to the collapse of supercavitation its subsequent motioncharacteristics at lower velocity are beyond the scope of thisarticle
22 Modeling Tail Slap Motion Based on the abovemen-tioned forward motion model for the projectile motioncharacteristics of its tail slap will be discussed next When theforward motion is disturbed by a random and instantaneousperturbation from surroundings or the cavitationrsquos instability
4 Mathematical Problems in Engineering
WaterProjectile
Caviation-water interface
FD
RL
RD
Figure 3The forces acting on the projectile during a single tail slap
the projectile is modeled as a rigid body whose nose is fixedand the tail swings around the nose based on previous Thetail will slap repeatedly on the supercavity interface aroundthe projectile and a single tail slap is taken into account tostudy the slap details firstly
If 120575 indicates the maximum distance that the projectiletail immersed into thewater layer through the cavity interfaceduring slap (Figure 3) then
120575 = 119871 sin 120572 + 1198632 cos 120572 minus 119903 (8)
where L is the length of the moving body and D is thediameter of the projectile tail
According to the above model thickness of the waterlayer disturbed by the projectile is defined as 120582120575 (where120582 is a coefficient less than 1) and the cross-sectional areaof fluid layer is written as A
1= 120582120575sdotD The longitudinal and
lateral forces of the cavity boundary acting on the projectiletail are RD and RL respectively as shown in Figure 3 Thefollowing equations can be obtained due to the conservationof momentum
119877119863= 12058811986012 (1 minus cos 120572) (9)
119877119871= 12058811986012 sin 120572 (10)
Then the swing of the projectile body around the nosesatisfies the following equation
119868 = minus119877119863119886 sin 120572 minus 119877119871119886 cos 120572 (11)
When 120572 is small sin120572 can be approximated as 120572 and cos 120572as 1 By substituting (9) and (10) into (11) we get
119868 + 120588120582 [119871120572 + 1198632 minus 119903 ()]1198631198862120572 = 0 (12)
LetΦ be the relative movement angle of the projectile tailslap then we have Φ = 120572 minus [2119903() minus 119863]2119871 gt 0 Eq (12) canbe written as
119868Φ + 1205881205821198631198862Φ2 + 1205881205821198631198862 [119903 () minus 1198632 ]Φ = 0 (13)
If the slap time is shortΦ is small and 119903() can be seen asconstant Neglecting the termwithΦ2 of (13) we can simplifythe equation and end up with
Φ + 12059620Φ = 0 (14)
where 12059620= (1205881205821198631198862119868)[119903() minus 1198632]
The equation represents a process of the moment whenΦ is 0 (the initial slap point of the tail passes through thecavitation wall and into the water layer) to the momentwhen Φ again crosses 0 (the initial slap point of the tailpasses back into the cavitation bubble and exits the waterlayer) Therefore the duration of the slap is half of the simpleharmonic vibration period that is Δ119879 = 1198792 = 120587120596
0
Through solving the above simple harmonic equations thereis
Φ = 1198600cos (120596
0119905 + 120593) (15)
where 1198600= 120596119871120596
0is the amplitude of the simple harmonic
vibration of the projectile in the water layer and 120593 = minus1205872 isthe initial phase of the simple harmonic vibration
The forces on the projectile in the water layer can then beexpressed as
119865 = minus119871119898119860012059620 cos (1205960119905 + 120593) (16)
Based on the kinetic model and the above analysis it isassumed that each tail slap of the supercavitating projectileis an instantaneous dynamic process and that the angularvelocity is constant and the slap reflection angle is equalto the incident angle before and after a single tail slap Letus define that the initial position of the projectile tail islocated at the center line of the cavitation offset Δx (initiallateral deviation) and swings upward with the nose at thecenter According to the change of the cavitation cavitysize with time the location of the next slap point can bepredicted Therefore the movement of the projectile tailin the supercavitation is essentially a slap problem withshrinking boundary (Figure 4) The parameters of the firstslap point are given 120596 is the angular velocity of the projectilebody around the nose (the angular velocity of the tail slap)
Mathematical Problems in Engineering 5
O
Centrality of Cavity
Outer Boundary at First Impact Point
Outer Boundary at Second Impact Point
AB
The Second Impact Point
Symmetric Position of the First Impact Point
D
The First Impact Point
E
C
F
Initial Position
G
1
1 1
2L
L
r1
r1
r2
Δx
Figure 4 Sketch of tail slap looking from behind the projectile
1205791is the incident angle 119905
1is the time from the initial point to
the first slap point and 1199031is the cavitation radius of the slap
point Then there is 1199031
1015840 = 1199031minus 1198632 so that
1205791= arctan d119909120596119871119905
1
1199051= radic(119903
1minus 1198632)2 minus d1199092120596119871
1199031= radicd1199092 + (120596119871119905
1)2 + 1198632
(17)
As shown in Figure 4 1205791is the angle between the center
of the circle E at the symmetric position of the first slap pointand the line OE at the center O of the cavity and the directionline EF at the first slap point From the first slap point to thesecond slap point the projectilersquos motion in the cavity is dueto slaps between the projectile tail and the cavity boundaryWhen the projectile moves towards the second slap point thecavity at the first slap point shrinks from E point along theEO direction The cavity and projectile intersect at point Aand the central position of the projectile tail is point B In thedirection of the EF line the following can be obtained
(1199031minus 1198632 ) cos 1205791minus radic(119903
2minus 1198632 )
2 minus [(1199031minus 1198632 ) sin 1205791]
2
+ 120596119871 (1199052minus 1199051) = 2 (119903
1minus 1198632 ) cos 1205791
(18)
By analogy the relationship between the nth slap and the(n+1)th slap is
(119903119899minus 1198632 ) cos 120579119899minus radic(119903119899+1 minus 1198632 )
2 minus [(119903119899 minus 1198632 ) sin 120579119899]2
+ 120596119871 (119905119899+1
minus 119905119899) = 2 (119903
119899minus 1198632 ) cos 120579119899
(19)
According to the iteration of the above equation thecavitation radius and the tail slap reflection angle at theoccurrence of the (n+1)th tail slap are as follows
119903119899+1 = C101 + 1205760119905119899+1
+ C2
120579119899+1
= arcsin((119903119899 minus 1198632) sin 120579119899(119903119899+1
minus 1198632) )(20)
By obtaining the above parameters the state change of theprojectile when the tail swings in the supercavitation can beobtained
3 Results and Discussion
Figure 5 shows the curves of force and relative motion anglefor projectile tail in water layer with time during repeatedtail slaps composed of multiple single tail slaps The forceamplitude of the projectile tail in harmonic motion in thewater layer decreases with the continuous occurrence of thetail slap and the attenuation trend gradually decreases withtime Among them the force amplitude of the first tail slapis 10 N while that of the second tail slap decreases to about4 N decreasing by 60 The relative motion angle whichdemonstrates the amplitude of the projectile tail in the water
6 Mathematical Problems in Engineering
0 04 08 12 16 2minus12
minus9
minus6
minus3
0
0515 052minus3
minus2
minus1
0
F (N
)
F (N
)
t (s)
t (s)
(a)
0 04 08 12 16 2t (s)
009
0045
minus0045
0
minus009
Φ(∘
)
(b)
Figure 5 Variation of the force and relative motion angle of projectile during tail slap in water layer with times
0300600900120015000
0005
001
0015
002
x (ms)
ΔT
(s)
(a)
0 40 80 120 160 200 240 280 320 360 4000
0005
001
0015
002
x (m)
ΔT
(s)
(b)
Figure 6 Variation curve of contact time between a projectile and the liquid velocity and horizontal displacement during projectile tail slap
layer increases with the increase of the number of tail slapsas shown in Figure 5(b) However the maximum swingamplitude in 2 s is about 008∘ which is far less than theabsolute swing angle 120572 of the projectile (generally 120572 gt 14∘)Figure 6 shows the variation of the contact time of the singletail slaps of the projectile in the cavity layer with the center ofmass velocity and themoving distance of the projectile within2 s With the continuous occurrence of the tail slaps thecontact time of the projectile with the water layer graduallyincreases from less than 0004 s When forward speed of theprojectile is lower than 250 ms the contact time rapidlyincreases to 0018 s but it is still far less than the tail slapinterval (about 018 s) Within 0018 s the relative changein the radius of the supercavitation around the projectile is003 that is the previous assumption of regarding 119903() as aconstant in the above single tail slap is reasonable When thecontact time of the projectile tail in the water layer continuesto increase dramatically (tgt 2 s) the corresponding projectilevelocity decreases to about 512 ms That is supercavitationwill eventually collapse and projectile motion instability mayoccur
MATLAB is further used to simulate the whole processof projectile tail slap movement through a 2 s time intervalThe specific working conditions and corresponding tail slapfrequency are shown in Table 1 Figures 7 and 8 show theschematic diagram of projectile tail motion relative to thecentral axis of the cavity at different angular velocities (120596 =1 2 rads) and different initial lateral deviation conditions
(Δx = 001 m 002 m) respectively Under the same initialside deviation Δx the number of tail slaps increases with theincrease of angular velocity 120596 and the effect of cavitationsuperposition gradually becomes obvious as shown in Fig-ure 7 When the angular velocity 120596 of tail slap is constantthe number of tail slaps increases as Δx increases (Table 1)and the tail slap trajectory is closer to the cavitation bubblewall
Table 2 shows the variation of cavitation radius 119903n tail slapreflection angle 120579n and tail slap occurrence time 119905n undertypical conditions (Δx = 001 m 120596 = 2 rads) During thetail slap sequence from 0 to 2s the cavity radius decreasesand the rate of speed loss decreases as the projectile movesforward and the tail slap occurs The radius decreases from00368 m for the first slap to 00324 m for the second slapThe cavitation radius of the 5th tail slap is 00302 m whilethe cavitation radius from the 6th to the 11th is stable ataround 0029mThe reflection angle gradually increases withthe continued tail slaps and the increasing trend decreasesconstantly which is basically consistent with the trend of thecavitation radiusThe time interval between two adjacent tailslaps also decreases slowly from 02096 s which is about01777 s between the 10th and 11th tail slaps that is the timeinterval between tail slaps is generally stable in the range of017 s to 021 s
Figure 9 shows the cavitation shrinkage curve and dia-gram of the tail slap process with different tail slap angularvelocities (120596 = 1 2 3 rads) and different initial lateral
Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
Launching datum
x
Water
Projectile
Cavitation-water interface
Cavitation
FD
Figure 1 Motion model of the supercavitating projectile
0 04 08 12 16 20
250
500
750
1000
1250
1500
Rands resultsPresent results
t (s)
x
(ms
)
(a)
0 04 08 12 16 2t (s)
050
100150200250300350400
Rands resultsPresent results
x(m
)
(b)
Figure 2 Plot of velocity and displacement for the horizontal motion of the supercavitating projectile and comparison to previous work
Setting 120576 = 1205881198601198962119898 when 120572 tends to be 0 the aboveequation can be turned into
lim120572997888rarr0
minus119865119863119898 = lim120572997888rarr0
minus1205881198601198962119898 2cos2120572 = lim120572997888rarr0
minus 120576 1199092cos2120572= minus1205762
(3)
From (3) we find
119909 = minus1205762 (4)
where 119909 = d119909d119905 Letting 1199090denote the initial velocity of the
projectile the following equations can be obtained by solvingthe differential equation to give
119909 (119905) = 1120576 In (1 + 1205760119905) (5)
(119905) = 01 + 1205760119905 (6)
By substituting (6) into (1) we get
119903 (119905) = C1
01 + 1205760119905 + C2 (7)
For the above mathematical model the initial conditionsfor homogeneous projectile are given as follows [10] theprojectile length is L = 012 m the projectile mass is 015 kgthe projectile tail diameter is D = 0015 m the nose diameteris 1198630 = 0002 m the taper angle of nose is 25∘ and the
corresponding cross-sectional area is A = 314159times10minus6 m2the distance from the tail of the projectile to its center ofmass is a = 005577 m and the moment of inertia of theprojectile about its center of mass is I = 0000777 kg m2Suppose that the initial velocity of the projectile is 119909
0=1500ms with the diameter of the cavity at the projectile
tail being r = 005 m and = 100ms with r = 003 mAccording to (1) C
1= 00001429 and C
2= 002857 ie 119903() =000001429 119909 + 002857 The MATLAB software package is
used to simulate forward motion of the projectile and resultsfor velocity and displacement versus time are demonstratedin Figure 2 It is found that the present results are in goodagreement with that got fromRand [10] as shown in Figure 2The projectilersquos velocity rapidly drops from 1500 ms to 3919ms within the first 02 s during which the displacement ofthe projectile is 1425 m Then the velocity slowly decreasesand the displacement slowly increases reaching 512 ms and3583 m at 2 s respectively In general the minimum speedrange required for the projectile tomaintain a supercavitation(ie cavitation number 120590 le 01) is about 40sim50 ms sothat the projectile may lose stability after 2 s of motiondue to the collapse of supercavitation its subsequent motioncharacteristics at lower velocity are beyond the scope of thisarticle
22 Modeling Tail Slap Motion Based on the abovemen-tioned forward motion model for the projectile motioncharacteristics of its tail slap will be discussed next When theforward motion is disturbed by a random and instantaneousperturbation from surroundings or the cavitationrsquos instability
4 Mathematical Problems in Engineering
WaterProjectile
Caviation-water interface
FD
RL
RD
Figure 3The forces acting on the projectile during a single tail slap
the projectile is modeled as a rigid body whose nose is fixedand the tail swings around the nose based on previous Thetail will slap repeatedly on the supercavity interface aroundthe projectile and a single tail slap is taken into account tostudy the slap details firstly
If 120575 indicates the maximum distance that the projectiletail immersed into thewater layer through the cavity interfaceduring slap (Figure 3) then
120575 = 119871 sin 120572 + 1198632 cos 120572 minus 119903 (8)
where L is the length of the moving body and D is thediameter of the projectile tail
According to the above model thickness of the waterlayer disturbed by the projectile is defined as 120582120575 (where120582 is a coefficient less than 1) and the cross-sectional areaof fluid layer is written as A
1= 120582120575sdotD The longitudinal and
lateral forces of the cavity boundary acting on the projectiletail are RD and RL respectively as shown in Figure 3 Thefollowing equations can be obtained due to the conservationof momentum
119877119863= 12058811986012 (1 minus cos 120572) (9)
119877119871= 12058811986012 sin 120572 (10)
Then the swing of the projectile body around the nosesatisfies the following equation
119868 = minus119877119863119886 sin 120572 minus 119877119871119886 cos 120572 (11)
When 120572 is small sin120572 can be approximated as 120572 and cos 120572as 1 By substituting (9) and (10) into (11) we get
119868 + 120588120582 [119871120572 + 1198632 minus 119903 ()]1198631198862120572 = 0 (12)
LetΦ be the relative movement angle of the projectile tailslap then we have Φ = 120572 minus [2119903() minus 119863]2119871 gt 0 Eq (12) canbe written as
119868Φ + 1205881205821198631198862Φ2 + 1205881205821198631198862 [119903 () minus 1198632 ]Φ = 0 (13)
If the slap time is shortΦ is small and 119903() can be seen asconstant Neglecting the termwithΦ2 of (13) we can simplifythe equation and end up with
Φ + 12059620Φ = 0 (14)
where 12059620= (1205881205821198631198862119868)[119903() minus 1198632]
The equation represents a process of the moment whenΦ is 0 (the initial slap point of the tail passes through thecavitation wall and into the water layer) to the momentwhen Φ again crosses 0 (the initial slap point of the tailpasses back into the cavitation bubble and exits the waterlayer) Therefore the duration of the slap is half of the simpleharmonic vibration period that is Δ119879 = 1198792 = 120587120596
0
Through solving the above simple harmonic equations thereis
Φ = 1198600cos (120596
0119905 + 120593) (15)
where 1198600= 120596119871120596
0is the amplitude of the simple harmonic
vibration of the projectile in the water layer and 120593 = minus1205872 isthe initial phase of the simple harmonic vibration
The forces on the projectile in the water layer can then beexpressed as
119865 = minus119871119898119860012059620 cos (1205960119905 + 120593) (16)
Based on the kinetic model and the above analysis it isassumed that each tail slap of the supercavitating projectileis an instantaneous dynamic process and that the angularvelocity is constant and the slap reflection angle is equalto the incident angle before and after a single tail slap Letus define that the initial position of the projectile tail islocated at the center line of the cavitation offset Δx (initiallateral deviation) and swings upward with the nose at thecenter According to the change of the cavitation cavitysize with time the location of the next slap point can bepredicted Therefore the movement of the projectile tailin the supercavitation is essentially a slap problem withshrinking boundary (Figure 4) The parameters of the firstslap point are given 120596 is the angular velocity of the projectilebody around the nose (the angular velocity of the tail slap)
Mathematical Problems in Engineering 5
O
Centrality of Cavity
Outer Boundary at First Impact Point
Outer Boundary at Second Impact Point
AB
The Second Impact Point
Symmetric Position of the First Impact Point
D
The First Impact Point
E
C
F
Initial Position
G
1
1 1
2L
L
r1
r1
r2
Δx
Figure 4 Sketch of tail slap looking from behind the projectile
1205791is the incident angle 119905
1is the time from the initial point to
the first slap point and 1199031is the cavitation radius of the slap
point Then there is 1199031
1015840 = 1199031minus 1198632 so that
1205791= arctan d119909120596119871119905
1
1199051= radic(119903
1minus 1198632)2 minus d1199092120596119871
1199031= radicd1199092 + (120596119871119905
1)2 + 1198632
(17)
As shown in Figure 4 1205791is the angle between the center
of the circle E at the symmetric position of the first slap pointand the line OE at the center O of the cavity and the directionline EF at the first slap point From the first slap point to thesecond slap point the projectilersquos motion in the cavity is dueto slaps between the projectile tail and the cavity boundaryWhen the projectile moves towards the second slap point thecavity at the first slap point shrinks from E point along theEO direction The cavity and projectile intersect at point Aand the central position of the projectile tail is point B In thedirection of the EF line the following can be obtained
(1199031minus 1198632 ) cos 1205791minus radic(119903
2minus 1198632 )
2 minus [(1199031minus 1198632 ) sin 1205791]
2
+ 120596119871 (1199052minus 1199051) = 2 (119903
1minus 1198632 ) cos 1205791
(18)
By analogy the relationship between the nth slap and the(n+1)th slap is
(119903119899minus 1198632 ) cos 120579119899minus radic(119903119899+1 minus 1198632 )
2 minus [(119903119899 minus 1198632 ) sin 120579119899]2
+ 120596119871 (119905119899+1
minus 119905119899) = 2 (119903
119899minus 1198632 ) cos 120579119899
(19)
According to the iteration of the above equation thecavitation radius and the tail slap reflection angle at theoccurrence of the (n+1)th tail slap are as follows
119903119899+1 = C101 + 1205760119905119899+1
+ C2
120579119899+1
= arcsin((119903119899 minus 1198632) sin 120579119899(119903119899+1
minus 1198632) )(20)
By obtaining the above parameters the state change of theprojectile when the tail swings in the supercavitation can beobtained
3 Results and Discussion
Figure 5 shows the curves of force and relative motion anglefor projectile tail in water layer with time during repeatedtail slaps composed of multiple single tail slaps The forceamplitude of the projectile tail in harmonic motion in thewater layer decreases with the continuous occurrence of thetail slap and the attenuation trend gradually decreases withtime Among them the force amplitude of the first tail slapis 10 N while that of the second tail slap decreases to about4 N decreasing by 60 The relative motion angle whichdemonstrates the amplitude of the projectile tail in the water
6 Mathematical Problems in Engineering
0 04 08 12 16 2minus12
minus9
minus6
minus3
0
0515 052minus3
minus2
minus1
0
F (N
)
F (N
)
t (s)
t (s)
(a)
0 04 08 12 16 2t (s)
009
0045
minus0045
0
minus009
Φ(∘
)
(b)
Figure 5 Variation of the force and relative motion angle of projectile during tail slap in water layer with times
0300600900120015000
0005
001
0015
002
x (ms)
ΔT
(s)
(a)
0 40 80 120 160 200 240 280 320 360 4000
0005
001
0015
002
x (m)
ΔT
(s)
(b)
Figure 6 Variation curve of contact time between a projectile and the liquid velocity and horizontal displacement during projectile tail slap
layer increases with the increase of the number of tail slapsas shown in Figure 5(b) However the maximum swingamplitude in 2 s is about 008∘ which is far less than theabsolute swing angle 120572 of the projectile (generally 120572 gt 14∘)Figure 6 shows the variation of the contact time of the singletail slaps of the projectile in the cavity layer with the center ofmass velocity and themoving distance of the projectile within2 s With the continuous occurrence of the tail slaps thecontact time of the projectile with the water layer graduallyincreases from less than 0004 s When forward speed of theprojectile is lower than 250 ms the contact time rapidlyincreases to 0018 s but it is still far less than the tail slapinterval (about 018 s) Within 0018 s the relative changein the radius of the supercavitation around the projectile is003 that is the previous assumption of regarding 119903() as aconstant in the above single tail slap is reasonable When thecontact time of the projectile tail in the water layer continuesto increase dramatically (tgt 2 s) the corresponding projectilevelocity decreases to about 512 ms That is supercavitationwill eventually collapse and projectile motion instability mayoccur
MATLAB is further used to simulate the whole processof projectile tail slap movement through a 2 s time intervalThe specific working conditions and corresponding tail slapfrequency are shown in Table 1 Figures 7 and 8 show theschematic diagram of projectile tail motion relative to thecentral axis of the cavity at different angular velocities (120596 =1 2 rads) and different initial lateral deviation conditions
(Δx = 001 m 002 m) respectively Under the same initialside deviation Δx the number of tail slaps increases with theincrease of angular velocity 120596 and the effect of cavitationsuperposition gradually becomes obvious as shown in Fig-ure 7 When the angular velocity 120596 of tail slap is constantthe number of tail slaps increases as Δx increases (Table 1)and the tail slap trajectory is closer to the cavitation bubblewall
Table 2 shows the variation of cavitation radius 119903n tail slapreflection angle 120579n and tail slap occurrence time 119905n undertypical conditions (Δx = 001 m 120596 = 2 rads) During thetail slap sequence from 0 to 2s the cavity radius decreasesand the rate of speed loss decreases as the projectile movesforward and the tail slap occurs The radius decreases from00368 m for the first slap to 00324 m for the second slapThe cavitation radius of the 5th tail slap is 00302 m whilethe cavitation radius from the 6th to the 11th is stable ataround 0029mThe reflection angle gradually increases withthe continued tail slaps and the increasing trend decreasesconstantly which is basically consistent with the trend of thecavitation radiusThe time interval between two adjacent tailslaps also decreases slowly from 02096 s which is about01777 s between the 10th and 11th tail slaps that is the timeinterval between tail slaps is generally stable in the range of017 s to 021 s
Figure 9 shows the cavitation shrinkage curve and dia-gram of the tail slap process with different tail slap angularvelocities (120596 = 1 2 3 rads) and different initial lateral
Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
WaterProjectile
Caviation-water interface
FD
RL
RD
Figure 3The forces acting on the projectile during a single tail slap
the projectile is modeled as a rigid body whose nose is fixedand the tail swings around the nose based on previous Thetail will slap repeatedly on the supercavity interface aroundthe projectile and a single tail slap is taken into account tostudy the slap details firstly
If 120575 indicates the maximum distance that the projectiletail immersed into thewater layer through the cavity interfaceduring slap (Figure 3) then
120575 = 119871 sin 120572 + 1198632 cos 120572 minus 119903 (8)
where L is the length of the moving body and D is thediameter of the projectile tail
According to the above model thickness of the waterlayer disturbed by the projectile is defined as 120582120575 (where120582 is a coefficient less than 1) and the cross-sectional areaof fluid layer is written as A
1= 120582120575sdotD The longitudinal and
lateral forces of the cavity boundary acting on the projectiletail are RD and RL respectively as shown in Figure 3 Thefollowing equations can be obtained due to the conservationof momentum
119877119863= 12058811986012 (1 minus cos 120572) (9)
119877119871= 12058811986012 sin 120572 (10)
Then the swing of the projectile body around the nosesatisfies the following equation
119868 = minus119877119863119886 sin 120572 minus 119877119871119886 cos 120572 (11)
When 120572 is small sin120572 can be approximated as 120572 and cos 120572as 1 By substituting (9) and (10) into (11) we get
119868 + 120588120582 [119871120572 + 1198632 minus 119903 ()]1198631198862120572 = 0 (12)
LetΦ be the relative movement angle of the projectile tailslap then we have Φ = 120572 minus [2119903() minus 119863]2119871 gt 0 Eq (12) canbe written as
119868Φ + 1205881205821198631198862Φ2 + 1205881205821198631198862 [119903 () minus 1198632 ]Φ = 0 (13)
If the slap time is shortΦ is small and 119903() can be seen asconstant Neglecting the termwithΦ2 of (13) we can simplifythe equation and end up with
Φ + 12059620Φ = 0 (14)
where 12059620= (1205881205821198631198862119868)[119903() minus 1198632]
The equation represents a process of the moment whenΦ is 0 (the initial slap point of the tail passes through thecavitation wall and into the water layer) to the momentwhen Φ again crosses 0 (the initial slap point of the tailpasses back into the cavitation bubble and exits the waterlayer) Therefore the duration of the slap is half of the simpleharmonic vibration period that is Δ119879 = 1198792 = 120587120596
0
Through solving the above simple harmonic equations thereis
Φ = 1198600cos (120596
0119905 + 120593) (15)
where 1198600= 120596119871120596
0is the amplitude of the simple harmonic
vibration of the projectile in the water layer and 120593 = minus1205872 isthe initial phase of the simple harmonic vibration
The forces on the projectile in the water layer can then beexpressed as
119865 = minus119871119898119860012059620 cos (1205960119905 + 120593) (16)
Based on the kinetic model and the above analysis it isassumed that each tail slap of the supercavitating projectileis an instantaneous dynamic process and that the angularvelocity is constant and the slap reflection angle is equalto the incident angle before and after a single tail slap Letus define that the initial position of the projectile tail islocated at the center line of the cavitation offset Δx (initiallateral deviation) and swings upward with the nose at thecenter According to the change of the cavitation cavitysize with time the location of the next slap point can bepredicted Therefore the movement of the projectile tailin the supercavitation is essentially a slap problem withshrinking boundary (Figure 4) The parameters of the firstslap point are given 120596 is the angular velocity of the projectilebody around the nose (the angular velocity of the tail slap)
Mathematical Problems in Engineering 5
O
Centrality of Cavity
Outer Boundary at First Impact Point
Outer Boundary at Second Impact Point
AB
The Second Impact Point
Symmetric Position of the First Impact Point
D
The First Impact Point
E
C
F
Initial Position
G
1
1 1
2L
L
r1
r1
r2
Δx
Figure 4 Sketch of tail slap looking from behind the projectile
1205791is the incident angle 119905
1is the time from the initial point to
the first slap point and 1199031is the cavitation radius of the slap
point Then there is 1199031
1015840 = 1199031minus 1198632 so that
1205791= arctan d119909120596119871119905
1
1199051= radic(119903
1minus 1198632)2 minus d1199092120596119871
1199031= radicd1199092 + (120596119871119905
1)2 + 1198632
(17)
As shown in Figure 4 1205791is the angle between the center
of the circle E at the symmetric position of the first slap pointand the line OE at the center O of the cavity and the directionline EF at the first slap point From the first slap point to thesecond slap point the projectilersquos motion in the cavity is dueto slaps between the projectile tail and the cavity boundaryWhen the projectile moves towards the second slap point thecavity at the first slap point shrinks from E point along theEO direction The cavity and projectile intersect at point Aand the central position of the projectile tail is point B In thedirection of the EF line the following can be obtained
(1199031minus 1198632 ) cos 1205791minus radic(119903
2minus 1198632 )
2 minus [(1199031minus 1198632 ) sin 1205791]
2
+ 120596119871 (1199052minus 1199051) = 2 (119903
1minus 1198632 ) cos 1205791
(18)
By analogy the relationship between the nth slap and the(n+1)th slap is
(119903119899minus 1198632 ) cos 120579119899minus radic(119903119899+1 minus 1198632 )
2 minus [(119903119899 minus 1198632 ) sin 120579119899]2
+ 120596119871 (119905119899+1
minus 119905119899) = 2 (119903
119899minus 1198632 ) cos 120579119899
(19)
According to the iteration of the above equation thecavitation radius and the tail slap reflection angle at theoccurrence of the (n+1)th tail slap are as follows
119903119899+1 = C101 + 1205760119905119899+1
+ C2
120579119899+1
= arcsin((119903119899 minus 1198632) sin 120579119899(119903119899+1
minus 1198632) )(20)
By obtaining the above parameters the state change of theprojectile when the tail swings in the supercavitation can beobtained
3 Results and Discussion
Figure 5 shows the curves of force and relative motion anglefor projectile tail in water layer with time during repeatedtail slaps composed of multiple single tail slaps The forceamplitude of the projectile tail in harmonic motion in thewater layer decreases with the continuous occurrence of thetail slap and the attenuation trend gradually decreases withtime Among them the force amplitude of the first tail slapis 10 N while that of the second tail slap decreases to about4 N decreasing by 60 The relative motion angle whichdemonstrates the amplitude of the projectile tail in the water
6 Mathematical Problems in Engineering
0 04 08 12 16 2minus12
minus9
minus6
minus3
0
0515 052minus3
minus2
minus1
0
F (N
)
F (N
)
t (s)
t (s)
(a)
0 04 08 12 16 2t (s)
009
0045
minus0045
0
minus009
Φ(∘
)
(b)
Figure 5 Variation of the force and relative motion angle of projectile during tail slap in water layer with times
0300600900120015000
0005
001
0015
002
x (ms)
ΔT
(s)
(a)
0 40 80 120 160 200 240 280 320 360 4000
0005
001
0015
002
x (m)
ΔT
(s)
(b)
Figure 6 Variation curve of contact time between a projectile and the liquid velocity and horizontal displacement during projectile tail slap
layer increases with the increase of the number of tail slapsas shown in Figure 5(b) However the maximum swingamplitude in 2 s is about 008∘ which is far less than theabsolute swing angle 120572 of the projectile (generally 120572 gt 14∘)Figure 6 shows the variation of the contact time of the singletail slaps of the projectile in the cavity layer with the center ofmass velocity and themoving distance of the projectile within2 s With the continuous occurrence of the tail slaps thecontact time of the projectile with the water layer graduallyincreases from less than 0004 s When forward speed of theprojectile is lower than 250 ms the contact time rapidlyincreases to 0018 s but it is still far less than the tail slapinterval (about 018 s) Within 0018 s the relative changein the radius of the supercavitation around the projectile is003 that is the previous assumption of regarding 119903() as aconstant in the above single tail slap is reasonable When thecontact time of the projectile tail in the water layer continuesto increase dramatically (tgt 2 s) the corresponding projectilevelocity decreases to about 512 ms That is supercavitationwill eventually collapse and projectile motion instability mayoccur
MATLAB is further used to simulate the whole processof projectile tail slap movement through a 2 s time intervalThe specific working conditions and corresponding tail slapfrequency are shown in Table 1 Figures 7 and 8 show theschematic diagram of projectile tail motion relative to thecentral axis of the cavity at different angular velocities (120596 =1 2 rads) and different initial lateral deviation conditions
(Δx = 001 m 002 m) respectively Under the same initialside deviation Δx the number of tail slaps increases with theincrease of angular velocity 120596 and the effect of cavitationsuperposition gradually becomes obvious as shown in Fig-ure 7 When the angular velocity 120596 of tail slap is constantthe number of tail slaps increases as Δx increases (Table 1)and the tail slap trajectory is closer to the cavitation bubblewall
Table 2 shows the variation of cavitation radius 119903n tail slapreflection angle 120579n and tail slap occurrence time 119905n undertypical conditions (Δx = 001 m 120596 = 2 rads) During thetail slap sequence from 0 to 2s the cavity radius decreasesand the rate of speed loss decreases as the projectile movesforward and the tail slap occurs The radius decreases from00368 m for the first slap to 00324 m for the second slapThe cavitation radius of the 5th tail slap is 00302 m whilethe cavitation radius from the 6th to the 11th is stable ataround 0029mThe reflection angle gradually increases withthe continued tail slaps and the increasing trend decreasesconstantly which is basically consistent with the trend of thecavitation radiusThe time interval between two adjacent tailslaps also decreases slowly from 02096 s which is about01777 s between the 10th and 11th tail slaps that is the timeinterval between tail slaps is generally stable in the range of017 s to 021 s
Figure 9 shows the cavitation shrinkage curve and dia-gram of the tail slap process with different tail slap angularvelocities (120596 = 1 2 3 rads) and different initial lateral
Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
O
Centrality of Cavity
Outer Boundary at First Impact Point
Outer Boundary at Second Impact Point
AB
The Second Impact Point
Symmetric Position of the First Impact Point
D
The First Impact Point
E
C
F
Initial Position
G
1
1 1
2L
L
r1
r1
r2
Δx
Figure 4 Sketch of tail slap looking from behind the projectile
1205791is the incident angle 119905
1is the time from the initial point to
the first slap point and 1199031is the cavitation radius of the slap
point Then there is 1199031
1015840 = 1199031minus 1198632 so that
1205791= arctan d119909120596119871119905
1
1199051= radic(119903
1minus 1198632)2 minus d1199092120596119871
1199031= radicd1199092 + (120596119871119905
1)2 + 1198632
(17)
As shown in Figure 4 1205791is the angle between the center
of the circle E at the symmetric position of the first slap pointand the line OE at the center O of the cavity and the directionline EF at the first slap point From the first slap point to thesecond slap point the projectilersquos motion in the cavity is dueto slaps between the projectile tail and the cavity boundaryWhen the projectile moves towards the second slap point thecavity at the first slap point shrinks from E point along theEO direction The cavity and projectile intersect at point Aand the central position of the projectile tail is point B In thedirection of the EF line the following can be obtained
(1199031minus 1198632 ) cos 1205791minus radic(119903
2minus 1198632 )
2 minus [(1199031minus 1198632 ) sin 1205791]
2
+ 120596119871 (1199052minus 1199051) = 2 (119903
1minus 1198632 ) cos 1205791
(18)
By analogy the relationship between the nth slap and the(n+1)th slap is
(119903119899minus 1198632 ) cos 120579119899minus radic(119903119899+1 minus 1198632 )
2 minus [(119903119899 minus 1198632 ) sin 120579119899]2
+ 120596119871 (119905119899+1
minus 119905119899) = 2 (119903
119899minus 1198632 ) cos 120579119899
(19)
According to the iteration of the above equation thecavitation radius and the tail slap reflection angle at theoccurrence of the (n+1)th tail slap are as follows
119903119899+1 = C101 + 1205760119905119899+1
+ C2
120579119899+1
= arcsin((119903119899 minus 1198632) sin 120579119899(119903119899+1
minus 1198632) )(20)
By obtaining the above parameters the state change of theprojectile when the tail swings in the supercavitation can beobtained
3 Results and Discussion
Figure 5 shows the curves of force and relative motion anglefor projectile tail in water layer with time during repeatedtail slaps composed of multiple single tail slaps The forceamplitude of the projectile tail in harmonic motion in thewater layer decreases with the continuous occurrence of thetail slap and the attenuation trend gradually decreases withtime Among them the force amplitude of the first tail slapis 10 N while that of the second tail slap decreases to about4 N decreasing by 60 The relative motion angle whichdemonstrates the amplitude of the projectile tail in the water
6 Mathematical Problems in Engineering
0 04 08 12 16 2minus12
minus9
minus6
minus3
0
0515 052minus3
minus2
minus1
0
F (N
)
F (N
)
t (s)
t (s)
(a)
0 04 08 12 16 2t (s)
009
0045
minus0045
0
minus009
Φ(∘
)
(b)
Figure 5 Variation of the force and relative motion angle of projectile during tail slap in water layer with times
0300600900120015000
0005
001
0015
002
x (ms)
ΔT
(s)
(a)
0 40 80 120 160 200 240 280 320 360 4000
0005
001
0015
002
x (m)
ΔT
(s)
(b)
Figure 6 Variation curve of contact time between a projectile and the liquid velocity and horizontal displacement during projectile tail slap
layer increases with the increase of the number of tail slapsas shown in Figure 5(b) However the maximum swingamplitude in 2 s is about 008∘ which is far less than theabsolute swing angle 120572 of the projectile (generally 120572 gt 14∘)Figure 6 shows the variation of the contact time of the singletail slaps of the projectile in the cavity layer with the center ofmass velocity and themoving distance of the projectile within2 s With the continuous occurrence of the tail slaps thecontact time of the projectile with the water layer graduallyincreases from less than 0004 s When forward speed of theprojectile is lower than 250 ms the contact time rapidlyincreases to 0018 s but it is still far less than the tail slapinterval (about 018 s) Within 0018 s the relative changein the radius of the supercavitation around the projectile is003 that is the previous assumption of regarding 119903() as aconstant in the above single tail slap is reasonable When thecontact time of the projectile tail in the water layer continuesto increase dramatically (tgt 2 s) the corresponding projectilevelocity decreases to about 512 ms That is supercavitationwill eventually collapse and projectile motion instability mayoccur
MATLAB is further used to simulate the whole processof projectile tail slap movement through a 2 s time intervalThe specific working conditions and corresponding tail slapfrequency are shown in Table 1 Figures 7 and 8 show theschematic diagram of projectile tail motion relative to thecentral axis of the cavity at different angular velocities (120596 =1 2 rads) and different initial lateral deviation conditions
(Δx = 001 m 002 m) respectively Under the same initialside deviation Δx the number of tail slaps increases with theincrease of angular velocity 120596 and the effect of cavitationsuperposition gradually becomes obvious as shown in Fig-ure 7 When the angular velocity 120596 of tail slap is constantthe number of tail slaps increases as Δx increases (Table 1)and the tail slap trajectory is closer to the cavitation bubblewall
Table 2 shows the variation of cavitation radius 119903n tail slapreflection angle 120579n and tail slap occurrence time 119905n undertypical conditions (Δx = 001 m 120596 = 2 rads) During thetail slap sequence from 0 to 2s the cavity radius decreasesand the rate of speed loss decreases as the projectile movesforward and the tail slap occurs The radius decreases from00368 m for the first slap to 00324 m for the second slapThe cavitation radius of the 5th tail slap is 00302 m whilethe cavitation radius from the 6th to the 11th is stable ataround 0029mThe reflection angle gradually increases withthe continued tail slaps and the increasing trend decreasesconstantly which is basically consistent with the trend of thecavitation radiusThe time interval between two adjacent tailslaps also decreases slowly from 02096 s which is about01777 s between the 10th and 11th tail slaps that is the timeinterval between tail slaps is generally stable in the range of017 s to 021 s
Figure 9 shows the cavitation shrinkage curve and dia-gram of the tail slap process with different tail slap angularvelocities (120596 = 1 2 3 rads) and different initial lateral
Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
0 04 08 12 16 2minus12
minus9
minus6
minus3
0
0515 052minus3
minus2
minus1
0
F (N
)
F (N
)
t (s)
t (s)
(a)
0 04 08 12 16 2t (s)
009
0045
minus0045
0
minus009
Φ(∘
)
(b)
Figure 5 Variation of the force and relative motion angle of projectile during tail slap in water layer with times
0300600900120015000
0005
001
0015
002
x (ms)
ΔT
(s)
(a)
0 40 80 120 160 200 240 280 320 360 4000
0005
001
0015
002
x (m)
ΔT
(s)
(b)
Figure 6 Variation curve of contact time between a projectile and the liquid velocity and horizontal displacement during projectile tail slap
layer increases with the increase of the number of tail slapsas shown in Figure 5(b) However the maximum swingamplitude in 2 s is about 008∘ which is far less than theabsolute swing angle 120572 of the projectile (generally 120572 gt 14∘)Figure 6 shows the variation of the contact time of the singletail slaps of the projectile in the cavity layer with the center ofmass velocity and themoving distance of the projectile within2 s With the continuous occurrence of the tail slaps thecontact time of the projectile with the water layer graduallyincreases from less than 0004 s When forward speed of theprojectile is lower than 250 ms the contact time rapidlyincreases to 0018 s but it is still far less than the tail slapinterval (about 018 s) Within 0018 s the relative changein the radius of the supercavitation around the projectile is003 that is the previous assumption of regarding 119903() as aconstant in the above single tail slap is reasonable When thecontact time of the projectile tail in the water layer continuesto increase dramatically (tgt 2 s) the corresponding projectilevelocity decreases to about 512 ms That is supercavitationwill eventually collapse and projectile motion instability mayoccur
MATLAB is further used to simulate the whole processof projectile tail slap movement through a 2 s time intervalThe specific working conditions and corresponding tail slapfrequency are shown in Table 1 Figures 7 and 8 show theschematic diagram of projectile tail motion relative to thecentral axis of the cavity at different angular velocities (120596 =1 2 rads) and different initial lateral deviation conditions
(Δx = 001 m 002 m) respectively Under the same initialside deviation Δx the number of tail slaps increases with theincrease of angular velocity 120596 and the effect of cavitationsuperposition gradually becomes obvious as shown in Fig-ure 7 When the angular velocity 120596 of tail slap is constantthe number of tail slaps increases as Δx increases (Table 1)and the tail slap trajectory is closer to the cavitation bubblewall
Table 2 shows the variation of cavitation radius 119903n tail slapreflection angle 120579n and tail slap occurrence time 119905n undertypical conditions (Δx = 001 m 120596 = 2 rads) During thetail slap sequence from 0 to 2s the cavity radius decreasesand the rate of speed loss decreases as the projectile movesforward and the tail slap occurs The radius decreases from00368 m for the first slap to 00324 m for the second slapThe cavitation radius of the 5th tail slap is 00302 m whilethe cavitation radius from the 6th to the 11th is stable ataround 0029mThe reflection angle gradually increases withthe continued tail slaps and the increasing trend decreasesconstantly which is basically consistent with the trend of thecavitation radiusThe time interval between two adjacent tailslaps also decreases slowly from 02096 s which is about01777 s between the 10th and 11th tail slaps that is the timeinterval between tail slaps is generally stable in the range of017 s to 021 s
Figure 9 shows the cavitation shrinkage curve and dia-gram of the tail slap process with different tail slap angularvelocities (120596 = 1 2 3 rads) and different initial lateral
Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
r1 = 00341 m
r6 = 00293 m
(a) Δx = 001 m 120596 = 1 rads
r1 = 00368 m
r11 = 00293 m
(b) Δx = 001 m 120596 = 2 rads
Figure 7 The motion trajectory of the projectile tail over 2 s with different tail slap speeds
r16 = 00293 m
r1 = 00385 m
(a) 120596 = 3 rads Δx = 001 m
r1 = 00293 m
r1 = 00394 m
(b) 120596 = 3 rads Δx = 002 m
Figure 8 Motion trajectory of the projectile tail over 2s with different initial lateral deviations
Table 1 Tail slap frequency of projectiles with different conditions
Statistical time Lateral deviation Slap frequency120596 = 1 rads 120596 = 2 rads 120596 = 3 rads
In 1 sΔx = 0 m 2 5 7Δx = 001 m 3 5 8Δx = 002 m 4 7 11
In 2 sΔx = 0 m 3 5 7Δx = 001 m 3 6 8Δx = 002 m 5 9 12
8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
0 04 08 12 16 2minus009
minus006
Boundary line of supercavitation
minus003
0
003
006
009r (
m)
t (s)
Δx = 001 G = 1 L>M
Δx = 001 G = 2 L>M
Δx = 001 G = 3 L>M
(a) Δx = 001 m
r (m
)
0 04 08 12 16 2minus009
minus006
minus003
0
003
006
009
Boundary line of supercavitation
t (s)Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(b) 120596 = 2 rads
Figure 9 Diagram of variation cavity radius and tail slap points over time in difference conditions
0 02 04 06 08 1 12 14 16 18 20
15
30
45
60
75
90
t (s)
Δx = 0 G = 2 L>M
Δx = 001 G = 2 L>M
Δx = 002 G = 2 L>M
(∘
)
Figure 10 Variation of the reflection angle of slap points over time at difference lateral deviations (120596 = 2 rads)
Table 2 Slap data of projectile tail in 2s
119899 119903119899(m) 120579
119899(∘) 119905
119899(s)
1 00368 199897 011452 00324 236683 032413 00312 250036 051514 00305 257275 070065 00302 261871 088336 00299 265062 106447 00297 267415 124448 00296 269222 142369 00295 270657 1602210 00294 271823 1780311 00293 272791 19580
deviations (Δx = 001 002 003 m) which further explainsthe tail slap frequency and tail slap points depicted in Figures7 and 8 Figure 10 depicts the variation of the reflection angleof slap points caused by the projectilersquos lateral deviationsWhen the lateral deviation is zero the projectile is reflected
along the vertical direction of the cavitation center line andits reflection angle is zero The reflection angle graduallyincreases as the lateral deviation increases In comparison tothe curve with lateral deviations of 001 m and 002 m whenthe angular velocity remains unchanged slap points increasewith the increase of lateral deviation
4 Conclusion
In this paper a simplified model of the tail slap motion of asupercavitating projectile in water is established In the casethat the angular velocity energy loss is not consideredmotionof the projectile is modeled as translation in the x-directionand rotation about the projectilersquos nose at a constant angularvelocity The forward speed and the forward path of the pro-jectile are inversely proportional functions and logarithmicfunctions with time as the independent variable respectivelyThe projectile spends less time and has a relatively smallerrelative motion angle during the tail slap process and theangular velocity remains constant when it is not in contactwith the cavitation bubblersquos liquid surroundings This makesthe rebound an instantaneous process when the projectile tail
Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 9
slaps the cavitation bubblersquos boundary The problem of theprojectile tail slap motion under this condition is a dynamicboundary slap problem in which the boundary is constantlychanging the variation law is known and the incident angle isequal to the reflection angleThe position of the tail slap pointis determined by the cavitation radius of the previous slappoint the time at which the tail slap occurs and the incidentangle From the tail slap simulation the following conclusionscan be drawn
(1) The force of the projectile in the water layer decreaseswith the increase of tail slap time and number of slapsresulting in an increase of the contact time between thetail and the liquid water and relative motion angle of theprojectile in the water layer However the contact timeand relative swing angle of projectile in the water layer arerelatively small
(2) Within the 2 s simulated time the contact time ofthe projectile with the water layer is much smaller thanthe projectilersquos tail slap harmonic period and the slap ofthe projectile and the cavitation wall can be regarded as aninstantaneous effect When the stay time of projectile tail inthe water layer continues to increase dramatically (tgt 2 s) theprojectile velocity drops below 50ms that is supercavitationpossibly collapses and projectile motion instability may thenoccur
(3) With the initial lateral deviation of the projectile andthe increase of the angular velocity of the projectile tailthe time of the first contact between the projectile tail andthe cavitation boundary advances and the number of slapsbetween the projectile tail and the cavitation wall surface alsoincreases Furthermore the trajectory map of the projectilersquostail slap becomes more complex the reflection angle of theslap points gradually increases and the trajectory of theprojectile gets closer to the contour of the cavity In the caseof supercavitation parameters such as the cavitation radiusof the tail slap point the reflection angle and time intervalsbetween two tail slaps tend to be stable as the number of tailslaps increases
Data Availability
(1)The reference data in Figure 2 (Randrsquos results) were fromthe paper ldquoImpactDynamics of a SupercavitatingUnderwaterProjectilerdquo at httpaudiophiletamcornelledurandpdfahsumpdf (2) The geometry data and some initial motionalparameters for the projectile were from the paper ldquoImpactDynamics of a Supercavitating Underwater Projectilerdquo athttpaudiophiletamcornelledurandpdfahsumpdf(3)Allother data in this paper were generated at School of Energyand Power Engineering Nanjing University of Science andTechnology Derived data supporting the findings of thisstudy are available from the corresponding author [XujianLYU at XJLYUnjusteducn] on request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The present work is financially supported by the NationalNatural Science Foundation of China (NSFC) under ProjectNumber 51609115 the Fundamental Research Funds for theCentral Universities under Project Number 30918012201 and30917012101 the Open Fund of State Key Laboratory ofOcean Engineering under Project Number 1818 and theUndergraduate Research Training Fund of NJUST underProject Number 201710288045 as well It should be noted thatpart of the job in present paper has been presented at the 2018IEEE 8th International Conference on Underwater SystemTechnology Theory and Applications (USYS) in December2018
References
[1] N Kitayama Y Ueda and T Matsuzawa ldquoExperimental inves-tigation of supercavitating underwater ballistic projectilerdquo inProceedings of the 30th International Symposium on BallisticsBALLISTICS 2017 pp 119ndash130 California CA USA September2017
[2] D Yang Y L Xiong and X F Guo ldquoDrag reduction of a rapidvehicle in supercavitating flowrdquo International Journal of NavalArchitecture andOceanEngineering vol 9 no 1 pp 35ndash44 2017
[3] S Zhao M Xiang H Zhou and W Zhang ldquoHydrodynamicsanalysis on the high-speed surface vehicle with super-cavitatinghydrofoilsrdquo Journal of Applied FluidMechanics vol 11 no 4 pp1005ndash1012 2018
[4] E Kadivar E Kadivar K Javadi and S M Javadpour ldquoTheinvestigation of natural super-cavitation flow behind three-dimensional cavitators full cavitation modelrdquo Applied Mathe-matical Modelling Simulation and Computation for Engineeringand Environmental Systems vol 45 pp 165ndash178 2017
[5] J Kozak P Rudolf M Hudec et al ldquoInvestigation of thecavitation within venturi tube influence of the generatedvortexrdquo in Advances in Hydroinformatics Springer Water pp1049ndash1067 Springer Singapore 2018
[6] S Shao A Karn B-K Ahn R E A Arndt and J HongldquoA comparative study of natural and ventilated supercavitationacross two closed-wall water tunnel facilitiesrdquo Experimentalermal and Fluid Science vol 88 pp 519ndash529 2017
[7] C Xu J Huang Y Wang X Wu C Huang and X WuldquoSupercavitating flow around high-speed underwater projectilenear free surface induced by air entrainmentrdquo AIP Advancesvol 8 no 3 p 035016 2018
[8] P J K Cameron P H Rogers J W Doane and D H GiffordldquoAn experiment for the study of free-flying supercavitatingprojectilesrdquo Journal of Fluids Engineering vol 133 no 2 pp21303ndash21303-9 2011
[9] G Lin B Balachandran and E H Abed ldquoNonlinear dynamicsand bifurcations of a supercavitating vehiclerdquo IEEE Journal ofOceanic Engineering vol 32 no 4 pp 753ndash761 2007
[10] R Rand R Pratap and D Rantni ldquoImpact dynamics of asupercavitating underwater projectilerdquo in Proceedings of ASMEDesign Engineering Technical Conference American Society ofMechanical Engineers Sacramento CA USA 1997
[11] C ZhaoCWangYWei andXZhang ldquoAn experimental studyon characteristics of cavitation and ballistic of axisymmetricslender body underwater movementrdquo Journal of Physics Con-ference Series vol 656 p 012175 2015
10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

10 Mathematical Problems in Engineering
[12] K Li and A Wang ldquoAnalyzing tail-slaps of shell structure ofsupercavitating vehiclerdquo Journal Huazhong University of ScienceTechnology (Natural Science Edition) vol 6 pp 82ndash85 2012
[13] D Zhang and J Hou ldquoAn improved method to solve tail shotstrive of supercavitating projectilerdquoMarine Electric Technologyvol 10 pp 47ndash50 2013 (Chinese)
[14] Q He Y Wei T You and J Zhang ldquoAnalysis of tail-slaps ofsupercavitating vehicle influenced by distortion of cavity shaperdquoJournal of BeijingUniversity of Aeronautics andAstronautics vol38 no 4 pp 509ndash518 2012 (Chinese)
[15] W Zou andH Liu ldquoModeling and simulations of the supercav-itating vehicle with its tail-slapsrdquo Journal of Fluids Engineering-Transactions of the ASME vol 137 no 4 Article ID 04130242015
[16] M Mirzaei M M Alishahi and M Eghtesad ldquoHigh-speedunderwater projectiles modeling a new empirical approachrdquoJournal of the Brazilian Society of Mechanical Sciences andEngineering vol 37 no 2 pp 613ndash626 2015
[17] M Mirzaei M Eghtesad and M M Alishahi ldquoPlaning forceidentification in high-speed underwater vehiclesrdquo Journal ofVibration and Control vol 22 no 20 pp 4176ndash4191 2016
[18] S S Kulkarni and R Pratap ldquoStudies on the dynamics ofa supercavitating projectilerdquo Applied Mathematical Modellingvol 24 no 2 pp 113ndash129 2000
[19] C Zhao C Wang T Sun and X Zhang ldquoAnalysis of tail-slapping and ballistic characteristics of supercavitating pro-jectiles under different initial disturbancesrdquo Journal of HarbinInstitute of Technology vol 48 no 10 pp 71ndash76 2016 (Chinese)
[20] J Zhang J Zhang and Y Wei ldquoSimulation of tail-slap loadsof supercavitating projectilesrdquo in Proceedings of the 2010 irdInternational Conference on Information and Computing Science(ICIC) pp 163ndash166 Wuxi China June 2010
[21] A May ldquoWater entry and the cavity-running behavior ofmissilesrdquo Navsea Hydroballistics Advisory Committee SilverSpring Md Defense Technical Information Center 1975
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom