Embed Size (px)
Citation preview

1
Modeling and control of TriMARES AUVBruno M. Ferreira, Anıbal C. Matos, Nuno A. Cruz
INESC TEC (formerly known as INESC Porto),Faculty of Engineering, University of Porto,
Rua Dr. Roberto Frias, 3784200-465 Porto, Portugal
Email: [email protected]
Abstract—In robotics, models frequently play a central roleboth in analysis and development. In this paper, we derive themodel of TriMARES, a new inspection AUV with five degrees offreedom (DOF). We describe the complete six DOF model, deriveand present the corresponding parameters and coefficients. Thismodel was used to develop the controllers that currently governthe motion of TriMARES. We present the main ideas behindsuch control laws and show experimental results obtained fromvalidation tests under typical conditions.
I. INTRODUCTION
Dynamic, robust and high performance control commonlyrequires the use of mathematical models. Those models cap-ture the dynamics and the kinematics of the moving platformand can be used for both localization and control purposes.Approximated linear models often fail to accurately representthe dynamics of an object over a wide region of operation,in the state space domain. This becomes particularly conse-quential for the motion of marine vehicles as a result of thedominating nonlinear terms.
The present paper shows the derivation of the model ofthe TriMARES AUV [1], a five degrees of freedom (DOFs)robot for dam inspection, developed by INESC TEC. Themodularity feature, which was exploited in its predecessor,the MARES AUV [2], [3], was one of the key concepts thatled to the present shape. Inspection tasks generally requirehigh maneuverability and robust stability. The TriMARES’body and the thruster configuration are a result of carefulcontemplation of typical maneuvers that can be performed bythe AUV such as station keeping, hovering, lateral or frontalscan, just to cite a few.
II. MODELING
Some considerations about the body shape can considerablysimplify the model derivation. In this section, we will firststart by highlighting TriMARES geometric characteristics andsubsequently determine the model parameters.
A. Symmetries
For the design of TriMARES body shape, we have identifiedthe following major requirements:• Efficiency
B. Ferreira is supported by the Portuguese Foundation for Science andTechnology (FCT) through the PhD grant SFRH/BD/60522/2009.
• Maneuverabilty• Stability• Space availability for integration of user’s new sensor
As a result of the first item, the vehicle is based on threestreamlined bodies to minimize the viscous damping alongthe natural (longitudinal) axis. The disposal of the thrustersis strongly related to maneuverability and stability considera-tions. Body assymetries are particularly unwanted since theyinduce couplings between different DOFs as a consequenceof hydrodynamic cross-terms. Therefore, the vehicle was builtso that it is symmetric along the vertical xz-plane in orderto avoid cross-effects on yaw or sway dynamics and thusavoiding undesired thrust compensation to cancel out sucheffects.
The vehicle symmetry is particularly usefull for modelsimplification, as we will see next.
B. General model
In this subsection, we present the general model of Tri-MARES, based on the standard formulation [4].
Let us consider the motion of a mobile robot in thetridimensional space. Define {I} as the inertial referentialframe and {B} as the body fixed referential frame withorigin coincident with the center of gravity and the x andy-axes being coincident with the surge and sway axes. Therobot’s absolute linear position in {I} is denoted by the vectorηl = [xI , yI , zI ]
T ∈ R3, while its angular position is denotedby ηa = [φ, θ, ψ]T ∈ R3. The relative linear and angularvelocity vectors of the robot, expressed in the {B} frame, are
Fig. 1. TriMARES

2
Fig. 2. Bow view of TriMARES
Fig. 3. Starboard view of TriMARES
Fig. 4. Top view of TriMARES
given by νl = [u, v, w]T ∈ R3 and νa = [p, q, r]T ∈ R3,respectively. During operation, the robot is assumed to besubject to the effects of drifts that are represented by νc =[vx, vy, vz]
T ∈ R3, expressed in the {I} frame. Introducing theorthogonal rotation matrix Jl(ηa) (i.e., J−1l (ηa) = JT
l (ηa))from {B} to {I} parametrized by ηa, the velocity vectors inboth referential frames {I} and {B} are related through the
following expression (see [4]):
ηl = Jl(ηa)νl + νc. (1)
Similarly, the angular velocity relation is given through thetransformation matrix Ja(ηa) (see [4] for further details):
ηa = Ja(ηa)νa. (2)
Mobile robots are governed by a second order differentialequation which incorporates the effects of damping, addedmass, restoring and applied forces and moments. The relationbetween these forces and the rigid body dynamics is given bythe following six degrees of freedom (DOF) equation:
Mν = −C(ν)ν −D(ν)ν − g(η) + τ, (3)
where η = [ηTl ηTa ]
T and ν = [νTl νTa ]T are the concatenation
vectors of the absolute position and of the relative velocity,respectively, τ is the vector of actuation forces and moments,M,C(·), D(·) ∈ R6×6 and g(·) ∈ R6. M is a positive definitematrix, i.e. xTMx > 0∀x ∈ R6. The matrix M is due to rigid-body and added mass forces and moments, C(·) is originatedby the Coriolis and centriptal effects, D(·) contains the termsrelated to viscous damping and g(·) is the vector of restoringforces and moments originated by the weight and the bouyancyforces.
Some considerations have to made at this point, in order tosimplify the model. The following assumptions will stand forthe rest of the present paper:
1) The cross relation effects are mainly induced by the threemain composing bodies (tail, cynlinder and nose) andconnecting bars
2) The composing bodies are sufficiently far away fromeach other and the displaced fluid does not influencethe dynamics of the remaining ones
3) The influence of the protuberances on the bodies is smallcompared to the remaining forces and moments andcan be neglected (note that we are not including theconnecting bars)
4) The origin of the body-fixed frame coincides with thecenter of gravity of the vehicle
The item 2) lets us assume that there is no influence onheave dynamics in pure-surge motion and vice-versa. There-fore the combined inertia, MRB , and added mass, MA, matrixM =MRB +MA is given by (4).
From assumption 4) and from (4), the derivation of thematrix of centripetal and Coriolis terms C(·), resulting fromthe sum of the terms from rigid-body from inertia matrix andfrom added mass C = CRB+CA, is straightforward from [4].
Regarding the viscous damping matrix, we assume thatlinear components of damping are neglegible for the velocityunder consideration. Similarly, the terms higher than secondorder are also considered to be small enough to be neglected.Therefore, the resulting nonlinear viscous damping matrix isexpressed in (6).
The vector of restoring forces and moments is given in [4],

3
M =
m−Xu 0 0 0 −Xq 0
0 m− Yv 0 −Yp 0 −Yr0 0 m− Zw 0 −Zq 00 −Kv 0 Ixx −Kp 0 0−Mu 0 −Mz 0 Iyy −Mq 00 −Nv 0 0 0 Izz −Nr
(4)
C(ν) =
0 −mr mqmr 0 −mp−mq mp 00 −Zww − Zqq +Yvv + Ypp+ Yrr
+Zww + Zqq 0 −Xuu−Xqq−Yvv − Ypp− Yrr +Xuu+Xqq 0
0 −Zww − Zqq +Yvv + Ypp+ Yrr+Zww + Zqq 0 −Xuu−Xqq
−Yvv − Ypp− Yrr +Xuu+Xqq 00 Izzr − Yrv −Nrr −Iyyq +Xqu+ Zqw +Mqq
−Izzr + Yrv +Nrr 0 Ixxp− Ypv −KppIyyq −Xqu− Zqw −Mqq −Ixxp+ Ypv +Kpp 0
(5)
D(ν) = −
Xu|u||u| 0 0 0 Xq|q||q| 0
0 Yv|v||v| 0 Yp|p||p| 0 Yr|r||r|0 0 Zw|w||w| 0 Zq|q||q| 00 Kv|v||v| 0 Kp|p||p| 0 0
Mu|u||u| 0 Mw|w||w| 0 Mq|q||q| 00 Nv|v||v| 0 0 0 Nr|r||r|
(6)
by
g(η) = g(η2) =
(W −B) sin θ
−(W −B) cos θ sinφ−(W −B) cos(θ) cosφ
yBB cos θ cosφ− zBB cos θ sinφ−zBB sin θ − xBB cos θ cosφxBB cos θ sinφ+ yBB sin θ
, (7)
where W and B are the weight and the buoyancy forces,respectively. The vector g(·) can be considerably simplifiedif we consider that the roll angle is stable and equals zero(φ ≈ 0) and that some of the components of the position ofthe center of buoyancy are null (see table I).
Finally, the vector of forces and moments originated bythrust is given by
τ = Pτa (8)
where τa ∈ Rna is the vector of thruster forces and P ∈R6×na is given in (9). Note that we defined di as the vectorthat maps the direction of the force exerted by the thruster iand ri the corresponding position both in the body frame. Forthe present case, na = 7 is the number of thrusters.
Some of the parameters are presented in the table I.
III. DERIVATION OF THE COEFFICIENTS
In this section we derive the coefficients of the previoussections which relate the accelerations and the velocities withthe forces and moments acting on the body. Much of thederivation, in particular for viscous damping terms, is basedon semi-empirical formulas (see [5]). Several books provideexperimental and empirical formulas for determination of thecoefficients. See, for example, [6], [7], [8].
TABLE IPARAMETERS
Parameter Value Unitsm 1.10 · 102 kgW 7.84 · 102 NB 7.88 · 102 NxB , yB 0 mzB −3.50 · 10−2
z1, z2 −4.69 · 10−2 mz3, z4 9.97 · 10−2 my1,−y2 −2.29 · 10−1 my3,−y4 −7.67 · 10−2 mx5 −1.59 · 10−1 mx6 −3.31 · 10−1 mx7 4.38 · 10−1 m
A. Added mass terms
The axial added mass coefficient Xu for an ellipsoid is givenby the formula in [9]. Most of the equation for the derivationare empirical and imply the approximation of the body byan ellipsoid. For modeling purpose, and for this coefficientonly, we assume that the three main bodies contribute withthe major added mass force. The protuberances such as motorsand antenna, as well as the connecting bars, are not considered.Therefore, we determine the axial added mass coefficient as
Xu ≈3∑
i=1
− α0
2− α0m/3, (10)
where α0 = 2(1−e2)e3
(12 ln
1+e1−e − e
)and e = 1− (b/a)2, where
a = 1.21m is the length of the main bodies and b = 0.2mtheir diameter.
Before starting deriving the remaining added mass coef-ficients, let us define the cross section area a(x) in the

4
P =
[d1 ... dna
r1 × d1 ... rna × dna
]=
1 1 1 1 0 0 00 0 0 0 1 0 00 0 0 0 0 1 10 0 0 0 0 0 0z1 z2 z3 z4 0 −x6 −x7−y1 −y2 −y3 −y4 x5 0 0
(9)
TABLE IIADDED MASS COEFFICIENTS
Coefficient Value UnitsXu −5.87 · 100 kgYv , Zw −1.11 · 102 kgKp −1.90 · 102 kg·m2/radMq , Nr −1.26 · 101 kg·m2/radYp, Kv −1.26 · 101 kg·m/rad, kg·mYr , −Zq , −Mw , Nv −5.00 · 100 kg·m/rad, kg·mXq , Mu 1.35 · 10−1 kg·m/rad, kg·mYp, Kv −5.59 · 101 kg·m/rad, kg·m
plane defined by the set of points so that x is constant. Thefunction a(x) can be seen as the summation of the areas of aninfinitesimal slice of the vehicle at x. Furthermore, we definel(y, z) to be the length of the vehicle at point (y, z), i.e.,l(x, z) =
∫ xf (y,z)
x0(y,z)1dx. Hence the added mass coefficient are
given as follow:
Yv = −ρ∫L
a(x)dx (11)
Zw = Yv (12)
Kp = −ρ∫H
∫ yf (z)
y0(z)
||(y, z)||22 l(y, z)dydz (13)
Mq = −ρ∫L
x2a(x)dx (14)
Nr = Mq, (15)
where ρ is the fluid density, L is the length of the vehicle,H is the height and y0(z) and yf (z) represent the limits ofintegration which are obviously functions of z.
The cross-related terms are derived through the followingexpressions:
Yp = −ρ∫H
∫ yf (z)
y0(z)
||(y, z)||2sign(z) l(y, z)dydz(16)
Kv = Yp (17)
Yr = −ρ∫L
x a(x)dx (18)
Nv = −Mw = −Zq = Yr (19)
As for Xu, the derivation of Xq relies on approximationsof the bodies by ellipsoids [4]. A rough approximation of theremaining coefficients is given by
Xq =Mu ≈3∑
i=1
ziXu
3, (20)
where zi denotes the position of the body i, i = 1, 2, 3, in thez-axis.
The table II lists the values of the added mass coefficientfor the particular case of TriMARES.
B. Viscous damping coefficients
The viscous damping force is a function of the projectedarea. We define lyz(z) to be the integral of the drag coef-ficient over the length of the yz-projected (see fig. 2) areaat position z, i.e., lyz(z) =
∫ yf (z)
y0(z)CD(y, z)dy. Analogously,
the integral of the drag coefficient over the height of thexz-projected (see fig. 3) area at position x is given bylxz(x) =
∫ zf (x)
z0(x)h(x, z)CD(x, z)dz, where h(x, z) : [x0, xf ]×
[z0(x), zf (x)] → {1, 2}. This function results from the factthat the projected bars and upper bodies contribute two timesfor the viscous damping. Indeed, assuming they are sufficientlyfar from each others, their contributions are equal and mustbe added. This is implicitly done by means of h(z). Similarly,l′xz(z) =
∫ xf (z)
x0(z)h(x, z)CD(x, z)dx is the integral of the drag
coefficient over the length of the xz-projected area at positionz. We also define lxy(x) =
∫ yf (x)
y0(x)CD(x, y)dx to be the
integral of the drag coefficient over the length of the xy-projected (see fig. 4) area at position x.
Actually, the drag coefficient CD is a function of the shapeand its value depends on the Reynolds number, on the lengthand on the diameter of the vehicle. In this paper, we willconsider that it depends only on the shape. For the operatingvelocities under consideration, we consider CD = 0.2 forellipsoidal shapes moving in the same direction as their majoraxes, CD = 0.8 for cylindrical shapes, and CD = 1.07 forcubic shapes.
Hence, the axial viscous damping coefficients are given by
Xu|u| = −1
2ρ
∫H
lyz(z)dz (21)
Yv|v| = −1
2ρ
∫L
lxz(x)dx (22)
Zw|w| = −1
2ρ
∫L
lxy(x)dx (23)
Kp|p| = −1
2ρ
∫H
|z|3l′xz(z)dz (24)
Mq|q| = −1
2ρ
∫L
|x|3lxy(x)dx (25)
Nr|r| = −1
2ρ
∫L
|x|3lxz(x)dx. (26)
The equations for the cross relation coefficients are ex-

5
TABLE IIIVISCOUS DAMPING COEFFICIENTS
Coefficient Value UnitsXu|u| −3.24 · 101 kg/mYv|v| −3.03 · 102 kg/mZw|w| −3.26 · 102 kg/mKp|p| −1.21 · 100 kg·m2/rad2
Mq|q| −1.75 · 101 kg·m2/rad2
Nr|r| −1.64 · 101 kg·m2/rad2
Xq|q| 9.52 · 10−2 kg·m/radYp|p| 1.92 · 10−1 kg·m/radYr|r| −5.867 · 100 kg·m/radZq|q| 7.20 · 100 kg·m/radKv|v| −6.32 · 100 kgMu|u| 7.27 · 100 kgMw|w| 1.31 · 101 kgNv|v| −1.08 · 101 kg
pressed as follow:
Xq|q| = −1
2ρ
∫H
z|z| lyz(z)dz (27)
Yp|p| =1
2ρ
∫H
z|z| l′xz(z)dz (28)
Yr|r| = −1
2ρ
∫L
x|x| lxz(x)dx (29)
Zq|q| =1
2ρ
∫L
x|x| lxy(x)dx (30)
Kv|v| =1
2ρ
∫H
z l′xz(z)dz (31)
Mu|u| = −1
2ρ
∫H
z lyz(z)dz (32)
Mw|w| =1
2ρ
∫L
x lxy(x)dx (33)
Nv|v| = −1
2ρ
∫L
x lxz(x)dx. (34)
The values of the viscous damping coefficients are presentedin table III.
IV. CENTER OF GRAVITY
In order to determine the center of gravity (CG), an experi-ment was carried out. The key idea was to suspend the vehiclefrom a single point. After having stabilized, the vector ofgravity in the body frame has the same direction as the vectorthat joins the hanging point to the CG. Thus, performing thesame experiment for several hanging points, the intersectionof the lines that pass through the hanging points and have thesame direction as the vector of gravity for the correspondingexperiment will determine the CG. The method is illustratedin 5.
We take the origin referential frame {B0} so that itsorigin coincides with the intersection of the vertical plane ofsymmetry of the lower cylinder (coincident with the xz-planein fig. 2-4) with the vertical plane tangent to bow (noses) andthe horizontal plane tangent to the top of the vehicle. Theaxes x0 and z0 are taken so that they point in the forward anddownward directions, respectively.
The corresponding data is given in table IV
TABLE IVGRAVITY VERSOR EXPRESSED IN THE BODY FRAME FOR SEVERAL
HANGING POINTS
Hanging point Gravity vector (expressed in {B0})[−2.92,−3.00,−0.15]T · 10−1 [−6.67, 5.71, 4.79]T · 10−1
[−2.92, 3.00,−0.15]T · 10−1 [−6.82,−5.86, 4.39]T · 10−1
[−8.88,−3.00,−0.15]T · 10−1 [5.31, 6.50, 5.43]T · 10−1
[−8.88, 3.00,−0.15]T · 10−1 [5.38,−6.73, 5.08]T · 10−1
Fig. 5. Method for determination of the CG
The center of gravity, expressed in the frame {B0}, is easilyobtained by application of a regression technique and is givenby CG0 = [−6.43, 0.07, 2.23]T · 10−1m.
V. CONTROL
Having focused on flexibility and versatility of TriMARESmotion, the control algorithm was developed so that the severalcontrollable DOFs can be handled in a decoupled manner.Such characteristic allows the end-user to perform any typeof composed motion without having to be concerned withthe low-level control nor the intrinsic complex dynamics. Toillustrate the idea, suppose that we are interested in performingan elaborated trajectory in the horizontal plane which mayinvolve position and velocity – typical trajectory tracking, forinstance. However, the depth must remain constant over theoperation and the pitch must be different from zero (e.g., nosepointing towards the seafloor). This task is made possible bysetting the depth and pitch references constant, while the restof the DOF references remain available and ultimately set byan external entity (this type of motion is particularly interestingfor ROV mode operation).
As it could be preferable defining position or velocityreferences given in different referential frames, we considertwo possibilities for each of the DOFs: inertial, earth-fixedreferential frame and body-fixed referential. The control lawswere derived in order to meet essential requeriments:
• Ability to move according to position references given inthe earth-fixed frame
• Possibility of setting velocity references in the earth-fixedframe
• Capability of accepting velocity reference in the body-fixed frame.

6
520 540 560 580 600 620 640 660 680 700
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
time (s)
dept
h (m
)
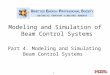
Fig. 6. Depth evolution (log20110520151408)
The task of deriving control laws that satisfy such requirementsis not trivial and becomes even more complex when the motionalong the different axes is intended to be decoupled. Thecomplexity mainly arises from the hydrodynamic couplingeffects.
Our approach makes use of the nonlinear control theory[10], implementing the backstepping method to achieve robustand accurate control of TriMARES. This nonlinear control toolhas already proven to be effective in our previous works onother vehicles. In particular, a similar approach was imple-mented in the MARES AUV (predecessor of TriMARES) in[3]. For the sake of brevity, we do not present the derivationof the control law in this paper. For further details, the readeris referred to [3], considering that the approach is similar.
The resulting control law is composed by a combination offeedforward and compensation terms. The former are obtainedthrough the model derived in the previous sections. The latterare typically functions of the errors and gains which wereposteriorly tuned to ensure adequate performance while takinginto account the practical bounds on thrust actuation.
VI. EXPERIMENTS
Experimental tests were conducted with TriMARES in theDouro river during spring 2011. The main objectives of themissions were validating the model and the controllers. Severaltests were successfully carried out. The model has shown tobe accurate and has fed the controllers with dead-reckonedestimates of forces. The accuracy was assessed through directcomparison of estimated and actual behaviors. We found,however, that the axial drag Xu|u| is slightly below its actualvalue. This arises from the choice of CD which is based onempirical formulas in the literature (see [7], [5]). Neverthe-less, this coefficient can be very easily determined via moreextensive experiments. The data that we have collected so farindicate that CD = 0.3 would be a better estimate for the dragcoefficient of the main bodies.
520 540 560 580 600 620 640 660 680 700−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
time (s)
heav
e sp
eed
(m/s
)
Fig. 7. Heave speed (log20110520151408)
The fig. 6 shows the evolution of the depth for a missionin which the vehicle is set to hover at a reference depth of 2meters during the first 30 seconds and is posteriorly switchedto 5 meters for the subsequent 50 seconds. Thereafter, thecontrollers are switched off and the vehicle naturally surfacedue to the positive buoyancy. The fig. 7 shows the heave speed,w, during the maneuver. In both figures, the data is not filteredand the presence of noise on the depth sensor and on theinertial measurement unit (IMU) cause the observed noise.
VII. CONCLUSIONS
We have presented the complete six DOF model of Tri-MARES. The current controllers use the model to generatesuitable commands for the set of seven thrusters on the vehicle.The combined operation of dead-reckoning of the dynamics,using the model, and the control laws has shown very satisfac-tory performances and has proven that the model is sufficientlyprecise to generate feedforward commands accordingly andguarantee the stability of TriMARES.
REFERENCES
[1] N. A. Cruz, A. C. Matos, R. M. Almeida, B. M. Ferreira, and N. Abreu,“Trimares - a hybrid auv/rov for dam inspection,” in OCEANS 2011,sept. 2011, pp. 1 –7.
[2] N. A. Cruz and A. C. Matos, “The mares auv, a modular autonomousrobot for environment sampling,” in OCEANS 2008, 2008, pp. 1–6.
[3] B. Ferreira, A. Matos, N. Cruz, and M. Pinto, “Modeling and Control ofthe MARES Autonomous Underwater Vehicle,” MARINE TECHNOL-OGY SOCIETY JOURNAL, vol. 44, no. 2, SI, pp. 19–36, MAR-APR2010.
[4] T. I. Fossen, Guidance and control of ocean vehicles. Wiley, 1994.[5] T. Prestero, “Verification of a six-degree of freedom simulation model
for the remus autonomous underwater vehicle,” Master’s thesis, Mas-sachussets Institute of Technology, 2001.
[6] S. Hoerner, Fluid-dynamic drag: practical information on aerodynamicdrag and hydrodynamic resistance. Hoerner Fluid Dynamics, 1965.
[7] F. White, Fluid mechanics. McGraw-Hill, 2003.[8] O. Faltinsen, Hydrodynamics of high-speed marine vehicles. Cambridge
University Press, 2005.[9] F. H. Imlay, “The complete expressions for added mass of a rigid body
moving in an ideal fluid,” David Taylor Model Basin, Tech. Rep., 1961.[10] H. K. Khalil, Nonlinear systems. Prentice Hall, 2002.