-
1
Modeling and Control for Fusion Plasma Stabilization by means of
a
Mechanical ECRH Launcher at TEXTOR
B.A. Hennen,
1,2 P.W.J.M. Nuij,
2 J.W. Oosterbeek,
3 M. Steinbuch,
2 E. Westerhof,
1
B.C.E. Vaessen1 and the TEXTOR-team
1
FOM-Institute for Plasma Physics Rijnhuizen*, Association
EURATOM-FOM,
PO Box 1207, 3430 BE Nieuwegein, the Netherlands,
www.rijnhuizen.nl;
2
Eindhoven University of Technology, Control Systems Technology
Group, PO Box 513,
5600 MB Eindhoven, the Netherlands, www.tue.nl;
3
Forschungszentrum Jülich GmbH, Institut für Plasmaphysik*,
Association EURATOM-FZJ,
52425 Jülich, Germany, www.fz-juelich.de;
* Partners in the Trilateral Euregio Cluster
e-mail address of main author: [email protected]
Abstract. This paper discusses several relevant control aspects,
regarding the specific task of feedback-controlled stabilization of
Neoclassical Tearing Modes (NTMs), for the Electron Cyclotron
Resonance Heating
(ECRH) installation operated at TEXTOR. The work reported
primarily focuses on the mechanics and control of
an ECRH launcher system with a 2 rotational degrees of freedom
(DOF) steer-able mirror. The dynamics of this
instrument are measured and modeled in terms of the equations of
motion. Nonlinear system behavior (mainly
induced by friction) is characterized. The impact of external
disturbances is considered. This system
identification procedure allows design and implementation of a
cascaded control strategy for improved actuation
of the mechanical launcher and also provides information on the
physical limitations of the system. The paper
additionally presents a proposal, from a control engineering
perspective, for development of NTM control
scenarios, dedicated to the TEXTOR ECRH installation.
1. Introduction
A tokamak is an open system, from which a wealth of control
problems arise [1]. Dedicated
control solutions differ from standard feedback control
concepts, applied similarly in other
disciplines, up to tasks constituting completely new control
challenges, demanding innovative
routes. Enhanced efficiency of a tokamak, requires higher plasma
beta, plasma shaping and
larger devices. Higher beta operation leads to the manifestation
of Neoclassical Tearing
Modes (NTMs). These instabilities are generated through
reconnection of adjacent flux
surfaces of the nested plasma topology, due to a lack of
bootstrap current, which is caused by
perturbations of the applied toroidal and poloidal fields
associated with local distortions of
their current density profile. NTMs hamper operation and can be
the cause of disruptions.
Hence, NTM suppression or controlled stabilization is of utmost
importance.
Localized injection of electron cyclotron (EC) waves [2]-[4] has
demonstrated its feasibility
to restore the distribution of the current profile by replacing
the missing bootstrap current,
thereby stabilizing NTMs. The missing bootstrap current can
either be replaced by auxiliary
heating in the island, i.e. the resistance across the island is
reduced, which increases the
current (ECRH), or by driving an additional (helical) current
perturbation into the plasma
parallel to the plasma current (ECCD), both of which can be
achieved using EC waves.
-
2
Mirror suspension
V
Mirror
Servo actuators
{
acuum window
An important problem for the proposed injection of high power
microwaves into the plasma is
control of the alignment between the island location and the
current deposition location [5].
Efficient, flexible and well-localized heating and current drive
can only be achieved adopting
accurate and precise feedback control, which should additionally
sustain alignment whenever
the island stabilizes or disappears. A steer-able launcher
system is considered to be able to
achieve these goals and will therefore be applied in future
tokamaks. The work reported here
primarily focuses on mechanics and control of such an ECRH
launcher system.
This paper is organized as follows. Section 2 will give a brief
description of relevant
components of the ECRH installation [6],[7] operated at TEXTOR,
including a mechanical
launcher system with a 2 rotational degrees of freedom (DOF)
steer-able mirror. Section 3
reports on the dynamical analysis and Frequency Response
Function (FRF) characterization
conducted for this instrument. The equations of motion are
derived. Experiments demonstrate
friction induced non-linear system behavior hence an additional
friction term is incorporated.
Section 4 considers the impact of external disturbances. The
system identification procedure
conducted, allows design of a cascaded control strategy for
improved actuation of the
mechanical launcher, which is the topic of Section 5, and also
provides information on the
physical limitations of the system. Finally, Section 6 initiates
a proposal for development of
NTM control scenarios dedicated to the TEXTOR ECRH
installation.
2. TEXTOR ECRH installation
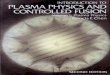
FIG. 1. Mechanical ECRH launcher
The TEXTOR ECRH installation for island suppression [5],[7]
consists of a 140 [GHz]
gyrotron, able to generate an output level of 800 [kW] with a
maximum pulse length of 10 [s].
A quasi-optical line transmits the gyrotron power via several
confocal mirrors directly into the
tokamak, where the beam enters through a CVD diamond window.
Inside the tokamak vessel,
the beam is projected onto the stainless steel mirror of the
mechanical ECRH launcher system.
The launcher is able to steer the mirror in 2 rotational degrees
of freedom (DOF), by means of
two translational servo actuators, which transfer the motion of
their driving shafts via a
suspension of rods and hinges towards the mirror, see Figure 1.
The servo actuators consist of
a rotational AC permanent magnet synchronous motor and a spindle
to convert motor axis
rotation into linear translational motion. The motors encompass
three phase sinusoidally
distributed stator windings and a rotor with permanent
magnets.
For the remainder of this paper the first DOF (in the horizontal
plane) will be denoted as
rotation, while the second DOF (in the vertical plane) is the
elevation. The steering range of
the mirror is limited between -45° and 45° in rotational
direction and from -30° to 30° in
Vacuüm break
Servo actuators
Mirror suspension
Mirror
-
3
elevational direction, where the mirror in its center position
is oriented at 0° elevation and
rotation. The elevational DOF corresponds to movement of the
microwave beam in poloidal
direction through the plasma, while the rotational degree
corresponds to the toroidal direction.
Requirements for sufficient speed of response of the launcher
are defined in terms of a 10°
rotation in 100 [ms], with a positioning accuracy of 1°, which
is based on a typical island
growth rate of 10 [ms] or more. Note that the ECRH microwave
beam can be steered at equal
speed in both DOFs, which adds special flexibility and
efficiency in the application of heating
and current drive on every possible location within a plasma
cross-section.
NTMs feature a flat electron temperature profile. Detection of
islands is therefore
accomplished through measurement of the perturbation the islands
cause on the electron
temperature profile. If an island is located between two ECE
channels, the fluctuations on
these two channels will be 180° out of phase, which can be
exploited to determine the exact
location and width of the NTM [8]. Cross-correlation among
different ECE channels can be
used to increase resolution and limit the number of channels
required. Furthermore, Mirnov
coils, soft X-ray and equilibrium codes are employed for island
detection. An accurate
positioning and alignment feedback control loop can either make
use of the gyrotron power
deposition- and island location or on the island width as a
control variable to steer the
launcher system in real-time.
An alternative ECE diagnostic, envisaged for installation on
TEXTOR, is accomplished
through an additional optical system, or line of sight scheme
[7], which is integrated halfway
in the transmission line to monitor island perturbations on the
electron temperature profile.
Within the system, the reflected ECE emission, 'gathered' from
the plasma, is separated from
the transmitted gyrotron power by means of a frequency selective
dielectric plate, which has
periodic minima and maxima in transmission and reflection
following the selected ECE
observation frequencies. An optical construction with mirrors,
an additional dielectric plate
and a 6 channel radiometer, with channels spaced in a range of
frequencies separated 3
[GHz] and starting at a frequency of 132.5 [GHz], measures the
EC temperature profile.
3. Dynamical characterization
The dynamics of the ECRH launcher are analyzed experimentally
using frequency response
measurement techniques. Open loop measurements of in- and output
signals are used to
estimate the Frequency Response Function (FRF) [9]. For a linear
system with excitation (or
input) )(tx and response (or output) )(ty one can write in the
time domain: ).()()( txthty ⊗=
In the frequency domain this convolution integral (with impulse
response )(th ) reads
),(ˆ)()( fHfSfS xxxy ⋅= where the auto and cross power spectral
density )( fS xx and )( fS xy
are estimated using fast Fourier transforms, which yields )(ˆ fH
as an estimate for the FRF.
As a measure for the linearity of this approximation, the
coherence function is defined by
,)()(
|)(|)(
2
2
fSfS
fSf
yyxx
xy
xy⋅
=γ with .1)(0 2
-
4
100
101
102
−160
−140
−120
−100
−80
−60
−40
Am
plit
ude
[dB
]
Rotational DOF
100
101
102
−200
−100
0
100
200
Pha
se [
deg.
]
100
101
102
0
0.2
0.4
0.6
0.8
1
Coh
eren
ce [
−]
Frequency [Hz]
0.1 [V]
0.2 [V]
0.4 [V]
0.6 [V]
0.8 [V]
1.0 [V]
1.2 [V]
100
101
102
−160
−140
−120
−100
−80
−60
−40
Am
plit
ude
[dB
]
Elevational DOF
100
101
102
−200
−100
0
100
200
Pha
se [
deg.
]
100
101
102
0
0.2
0.4
0.6
0.8
1
Coh
eren
ce [
−]
Frequency [Hz]
0.1 [V]
0.2 [V]
0.3 [V]
0.4 [V]
0.5 [V]
0.6 [V]
0.7 [V]
FIG. 2. Frequency Response Function measurements for both
degrees of freedom
A proper FRF measurement [9] usually adopts uniform random noise
as input signal )(tx in
order to guarantee excitation of the system in a broad range of
frequencies. Figure 2 shows the
FRF estimates obtained for both DOFs of the ECRH launcher, where
noise with different
amplitude levels in a frequency band of 0 – 200 [Hz] is
exploited to excite the system. This
input signal is provided directly as a torque to both servo
actuators. The output signal is a
linear acceleration measurement from piezoelectric
accelerometers mounted outside the
vacuum vessel on both driving shafts of the mirror suspension.
The obtained FRFs are
integrated twice in the Laplace domain to obtain the Bode plots
in Figure 2.
The Bode diagrams reflect dynamic behavior of the ECRH launcher,
which is dominated by
the actuators. Both axes of motion display comparable dynamics.
Note that resonances are
encountered near 22 [Hz] and 60 [Hz], which magnitudes are
excitation amplitude dependent.
They originate from the mirror suspension. One can furthermore
observe phase transitions
occurring near these frequencies, which also indicates system
dynamics. Note that, starting at
-90°, the phase decreases smoothly over all measured
frequencies, which suggests the
presence of a time-delay.
Whenever the root mean square (RMS) value of the excitation
signal is increased, a transition
towards higher frequency response amplitude levels occurs as
observed in the plots (following
the arrow directions). This transition demonstrates a nonlinear
dependence with respect to the
linearly increasing RMS values of the noise excitation and
appears to be dominant in the
frequency envelope 0-20 [Hz] and for low excitation levels. This
justifies the hypothesis that
this behavior might be caused by static friction, i.e. for low
amplitudes of excitation, the
system operates in the stiction zone, whereas, after a
transition zone with stick-slip behavior,
the system operates in full slip if a certain friction force
threshold is exceeded.
Based on kinematical and dynamical modeling techniques the
equations of motion for the
mirror suspension system of the ECRH launcher can be derived
[9]:
,)cos()cos()sin()sin(
)cos()cos()sin()sin()sin()cos(
33
2
3
2
2
211
fricelevelevelevelev FxkxbaFMJJ
JJJJ
−−−⋅==++
−−−
&&&&
&&&&&&&
θθϕθθϕϕ
θθϕθθϕϕθθϕθϕ (2)
-
5
100
101
102
103
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequency [Hz]
Po
wer
Sp
ectr
al D
ensi
ty [
dB
/Hz]
# 103079
Measurement outside plasma present phase
Measurement within plasma present phase
−15 −10 −5 0 5 10 15 20 25−0.5
0
0.5
1
Time [s]
Acc
eler
om
eter
Sig
nal
[V
]
# 103079
−15 −10 −5 0 5 10 15 20 25−200
0
200
400
Pla
sma
curr
ent
[kA
]
Toroidal magnetic field x 2 [Tesla]
# 103079
Fre
qu
ency
[H
z]
−10 −5 0 5 10 150
500
1000
1500
2000
2500
3000
−120
−100
−80
−60
−40
−20
0
20
−10 −5 0 5 10 15−0.5
0
0.5
Am
pli
tud
e [V
]
Time [s]
[dB]
,)sin()cos()cos(
)sin()cos()cos()cos()sin()sin()cos()sin()sin(
22,11,
2
2
2
13
2
333
fricrotrotrotrotrot FxkxbaFaFMJ
JJJJJ
−−−⋅−⋅==+
−+++
&&
&&&&&&&&
θθϕϕ
θθϕϕθϕθϕθϕϕθϕϕθ
(3)
where 3...1J is the mass moment of inertia, θ respectively ϕ the
rotation and elevation DOF.
elevrotM , is the angular moment forced upon the mirror by the
mirror suspension, consisting of
a force elevrotF , , delivered by the servo actuators in both
DOFs and a moment arm 3...1a defined
with respect to the center of mass of the mirror. elevrotk , and
elevrotb , respectively represent the
stiffness and damping coefficient of the mirror suspension. x is
the translational motion of
the servo actuator driving shafts. The equations of motion
additionally incorporate a nonlinear
friction component fricF , which is modeled in terms of the
Leuven friction model [10]. Note
that the friction characteristics encountered are of typical
concern for tracking of NTMs, since
tracking requires only small launcher movements, which justifies
the need for a model.
4. Disturbance characterization
The launcher system is operated in an environment where external
disturbances of various
nature might affect dynamic performance and can harm smooth
system operation in a
feedback loop. Magnetic fields, diagnostics, electrical
equipment and the plasma itself might
all, to some extent, superimpose noise and other frequency
components onto sensor signals.
External forces or forces caused by induced currents interacting
with the mechanical part of
the launcher can likewise affect servo system operation.
Disturbance characterization
experiments have therefore been conducted during operation of
the TEXTOR tokamak, to
give an impression as to what extent sensor noise originating
from such disturbances can
influence control system behavior.
FIG. 3. Time-domain plot, auto power spectra and time-frequency
spectrogram of an acceleration
measurement for the rotational DOF of the ECRH launcher during
TEXTOR shot # 103097.
-
6
Figure 3 shows the analysis of a signal measured during a TEXTOR
discharge from a linear
accelerometer located on the actuator driving shaft of the
rotational axis of motion. The
launcher is not purposely excited using an input signal. Hence,
all contents of the sensor
signal can be attributed to disturbances. The plasma current pI
and toroidal magnetic field
TB are depicted as well. At 0 seconds, the plasma is initiated.
The accelerometer signal
clearly responds to the ramp up of the magnetic field and the
presence of the plasma. A peak
is observed in the accelerometer signal when the plasma
disappears. The toroidal magnetic
field is ramped down and the signal amplitude returns to its
original level.
Power spectral densities (PSDs) and a time-frequency mapping are
depicted to obtain insights
in the frequency components of the signal and their propagation
in time. PSDs are derived for
a time frame before plasma and during plasma operation. Note
that all plots show a clear
periodic electric grid component at 50 [Hz]. Whereas the
signal’s frequency content remains
at a low energy level before plasma, ramp up of the magnetic
field lifts the signal to a higher
energy level and adds additional frequency components, including
a periodic component near
600 [Hz]. After breakdown of the plasma, even more energy is
added, including a strong
periodic at 1300 [Hz], which probably originates from the
vertical field control system. Note
that the energy content of the disturbing phenomena is most
likely not high enough to cause
actual mirror motion or induce currents in the mechanical parts
of the launcher.
The observed disturbances might, however, affect control system
behavior and therefore it is
preferential to invest in the design of proper filtering,
disturbance rejection and data
acquisition techniques. One could, for example, employ low-pass
filtering to reduce the
operational frequency band of the control signals. In this
context it is important to realize that
the launcher is a motion system, which typically demonstrates a
rather low bandwidth or
speed of response as formulated in the requirement of a 10°
rotation in 100 [ms] with a
positioning accuracy of 1°. Filtering of its control signals
with a rather low cut off frequency
of, for example, 200 [Hz] will therefore not affect system
functionality and performance.
5. Controller design
The servo actuators of the ECRH launcher are operated in
combination with servo amplifiers
to provide the motor with appropriate input trajectories and
control the servo system in closed
loop. A cascaded control structure is implemented for accurate
and precise control of the
system. The cascaded control structure, as depicted in Figure 4,
consists of three distinct
feedback control loops, i.e. position-, velocity- and current
(torque) control. The bandwidth or
speed of response increases towards the innermost loop.
The system measurements and modeling performed in previous
sections allow derivation of
transfer function models, which in turn can be applied to derive
dedicated controllers for the
cascaded control structure. The closed current (torque) control
loop guarantees a constant
motor torque. Since the current control loop is considered as
part of the servo actuator
dynamics )(sH in the FRF measurements, controller design solely
involves the speed and
position control loops. Controllers are obtained using a
frequency domain tuning procedure,
which exploits estimated transfer function models retrieved from
a frequency response fit
routine.
-
7
FIG. 4. Cascaded control loop
The stabilizing controller for the speed control loop consists
of a standard proportional
integral (PI) controller, a lead/lag compensator and a low-pass
filter as defined by
,
13/2
11
32
1
13/2
1
2)( 21
+⋅⋅
⋅
+⋅⋅⋅
+⋅⋅
⋅⋅+
⋅=
sf
k
sf
sf
s
fsksCspeed
ππ
ππ (4)
where 1k and 2k are gains and f is the desired cross-over
frequency, which determines the
bandwidth of the control loop. Applying this controller, a
closed loop transfer function model
can be derived for the speed control loop, which is adopted
subsequently for design of the
position controller, which results in a classical PI controller,
of the form
.2
)( 3s
fsksCposition
⋅+⋅=
π (5)
Performance of the feedback control system is demonstrated in
the open loop transfer function
( ))()( sHsC , sensitivity ( )( ))()(1/1 sHsC+ and Nyquist
diagram depicted in Figure 5. The open loop plot reveals that the 0
[dB] point is crossed at 8 [Hz], i.e. the cross-over frequency
or bandwidth of the controlled system is 8 [Hz]. The sensitivity
and Nyquist graphs show that
enough amplitude and phase margin is taken into account to
guarantee system stability. The
fourth subplot of Figure 5 shows control system response on a
reference trajectory for pure
cascade feedback as well as with additional torque and speed
feed-forward, which reduces the
response time and servo error considerably. As observed, the
controlled system is able to
rotate the launcher mirror by approximately 25° in 100 [ms] with
a maximum positioning
error of 0.4°, which corresponds to a servo actuator translation
of 0.30 [m] in 100 [ms], with
a maximum positioning error of 5·10¯³ [m]. Hence, performance is
well within the earlier
specified requirements. Similar control structures and
controllers can be applied for both
DOFs simultaneously.
6. NTM control scenarios
Development of NTM control scenarios, dedicated to the TEXTOR
ECRH installation [5],[7],
will require extensive simulation incorporating mechanical as
well as relevant physics
models. Since controller design usually requires only
approximating dynamic system
modeling, most physics models will require simplification while
sustaining agreement with
theoretical and experimental verifications. Controllers designed
and validated throughout
these procedures, should, for example, be capable of magnetic
island stabilization on different
flux surfaces and localization and tracking of fluctuating or
perturbed islands.
-
8
100
101
102
−80
−60
−40
−20
0
20
40
Am
pli
tude
[dB
]
Open loop
100
101
102
−200
−150
−100
−50
0
50
100
150
200
Frequency [Hz]
Phas
e [d
eg.]
FRF Measurement
Transfer function estimate "frfit"
100
101
102
−35
−30
−25
−20
−15
−10
−5
0
5
10
Am
pli
tud
e [d
B]
Sensitivity
Frequency [Hz]
FRF Measurement
Transfer function estimate "frfit"
−2 −1.5 −1 −0.5 0 0.5 1−2
−1.5
−1
−0.5
0
0.5
1
Real part
Imag
inar
y p
art
Nyquist diagram
FRF Measurement
Transfer function estimate "frfit"
0 0.2 0.4 0.6 0.8 1 1.2 1.4−20
−15
−10
−5
0
5
10
15
20
Time [s]
Rota
tion a
ngle
lau
nch
er m
irro
r [d
eg.]
reference trajectory
feedback response
feedforward response
feedforward servo error
FIG. 5. Open loop response, sensitivity, Nyquist diagram and
time domain response on a reference
trajectory for the cascaded control design
To further enhance the potential of NTM control, one could also
think in terms of alternative
control schemes and derivation of more complex and robust
controllers, which again requires
extensive validation and testing in a simulation environment
before application in an actual
system. Repetitive control techniques might, for example, be
applicable to the NTM
suppression problem, since in a fixed coordinate frame the local
distortions caused by the
islands typically constitute periodic phenomena. In mechanical
systems, repetitive control
combines actual feedback control with the derivation of improved
feed-forward signals to
enhance control performance in subsequent trajectory
repetitions. In the sense of NTM
stabilization, repetitive control could potentially offer
enhanced suppression due to control of
the gyrotron power in phase with periodic oscillations of the
island width.
7. Conclusions
As discussed, many elements of a dedicated NTM suppression and
plasma stabilization
method will possess a high level of complexity. But, as
observed, specific control expertise,
e.g. on modeling of process dynamics and system identification,
is readily available in
different engineering disciplines and well applicable for this
task. Observations verify that
mechanical system features induced by resonance events, friction
and disturbances, limit
performance and functionality of the mechanical ECRH launcher
concept operated at
TEXTOR. However, adopting modeling, experiments and simulation,
dedicated controllers
can be designed, which improve the mechanical properties of the
launcher and will guarantee
proper functioning of the system in real-time feedback
controlled suppression and
stabilization of magnetic islands.
-
9
Acknowledgements
This work, supported by the European Communities under the
Contract of Association
between EURATOM/FOM, was carried out within the framework of the
European Fusion
Programme. The views and opinions expressed herein do not
necessarily reflect those of the
European Commission.
References
[1] PIRONTI, A., WALKER, M., et al., “Special sections on
Control of tokamak plasmas”,
IEEE Control Systems Magazine 25(5) (2005) 24-92 and 26(2)
(2006) 30-91.
[2] ISAYAMA, A., et al., “Complete stabilization of a tearing
mode in steady-state high- pβ
H-mode discharges by the first harmonic electron cyclotron
heating/current drive on
JT60-U”, Plasma Physics and Controlled Fusion 42 (2000)
L37-L45.
[3] GANTENBEIN, G., et al., “Complete Suppression of
Neoclassical Tearing Modes with
Current Drive at the Electron-Cyclotron-Resonance Frequency in
ASDEX Upgrade
Tokamak”, Physical Review Letters 85(6) (2000).
[4] PETTY, C., et al., “Complete suppression of the m=2/n=1
neoclassical tearing mode
using electron cyclotron current drive in DIII-D”, Nuclear
Fusion 44 (2004) 243-251.
[5] HUMPHREYS, D.A., et al., “Active control for stabilization
of neoclassical tearing
modes”, Physics of Plasmas 13 (2006) 056113.
[6] WESTERHOF, E., et al., “Electron Cyclotron Resonance Heating
on TEXTOR”,
Fusion Science and Technology 47 (2005) 108-118.
[7] OOSTERBEEK, J.W., et al., “Design of a feedback system to
stabilise instabilities by
ECRH using a combined ECW launcher and ECE receiver”, 24th SOFT
(2006).
[8] BERRINO, J., et al., “Automatic Real-Time Tracking and
Stabilization of Magnetic
Islands in a Tokamak Using Temperature Fluctuations and ECW
Power”,
IEEE Transactions on Nuclear Science 53(3) (2006) 1009-1014.
[9] DE KRAKER, A., and VAN CAMPEN, D.H., Mechanical vibrations,
Shaker
Publishing, Maastricht (2001).
[10] CANUDAS DE WIT, C., et al., “A New Model for Control of
Systems with Friction”,
IEEE Transactions on Automatic Control 40(3) (1995) 419-425.