Embed Size (px)
Citation preview
Model Predictive Control Short Course —Introduction
James B. Rawlings Michael J. Risbeck Nishith R. Patel
Department of Chemical and Biological Engineering
Copyright c© 2017 by James B. Rawlings
Milwaukee, WIAugust 28–29, 2017
JCI – 2017 MPC short course 1 / 70
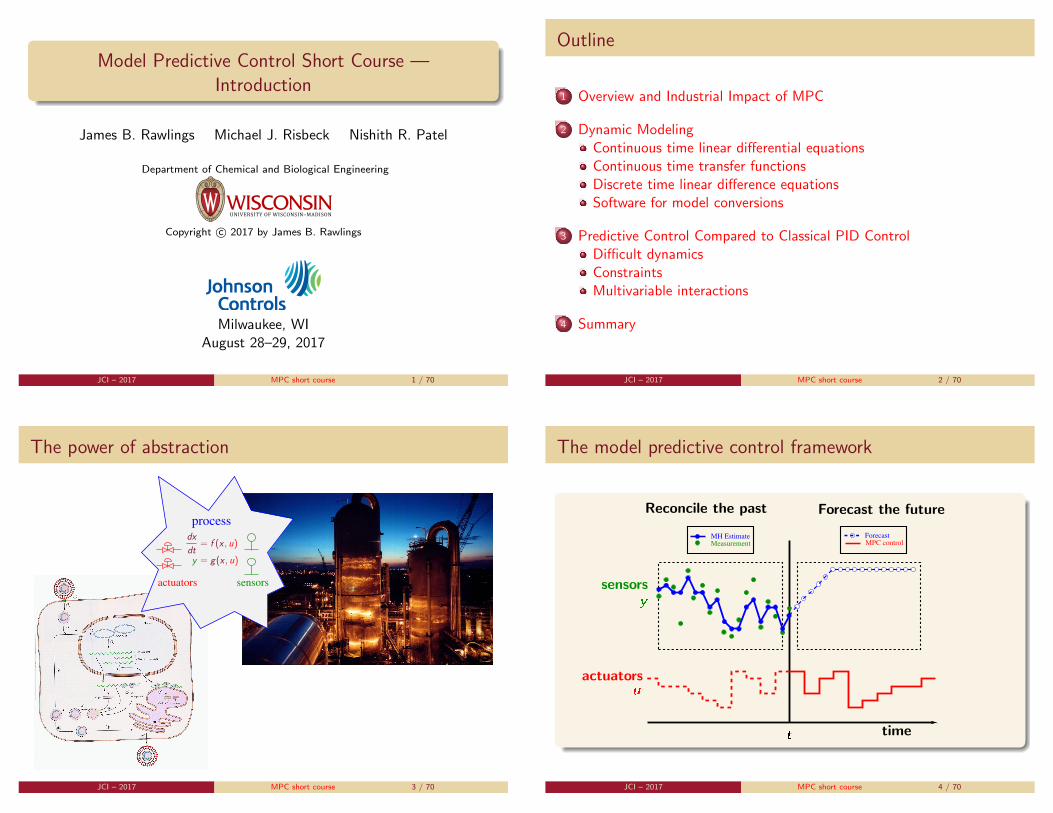
Outline
1 Overview and Industrial Impact of MPC
2 Dynamic ModelingContinuous time linear differential equationsContinuous time transfer functionsDiscrete time linear difference equationsSoftware for model conversions
3 Predictive Control Compared to Classical PID ControlDifficult dynamicsConstraintsMultivariable interactions
4 Summary
JCI – 2017 MPC short course 2 / 70
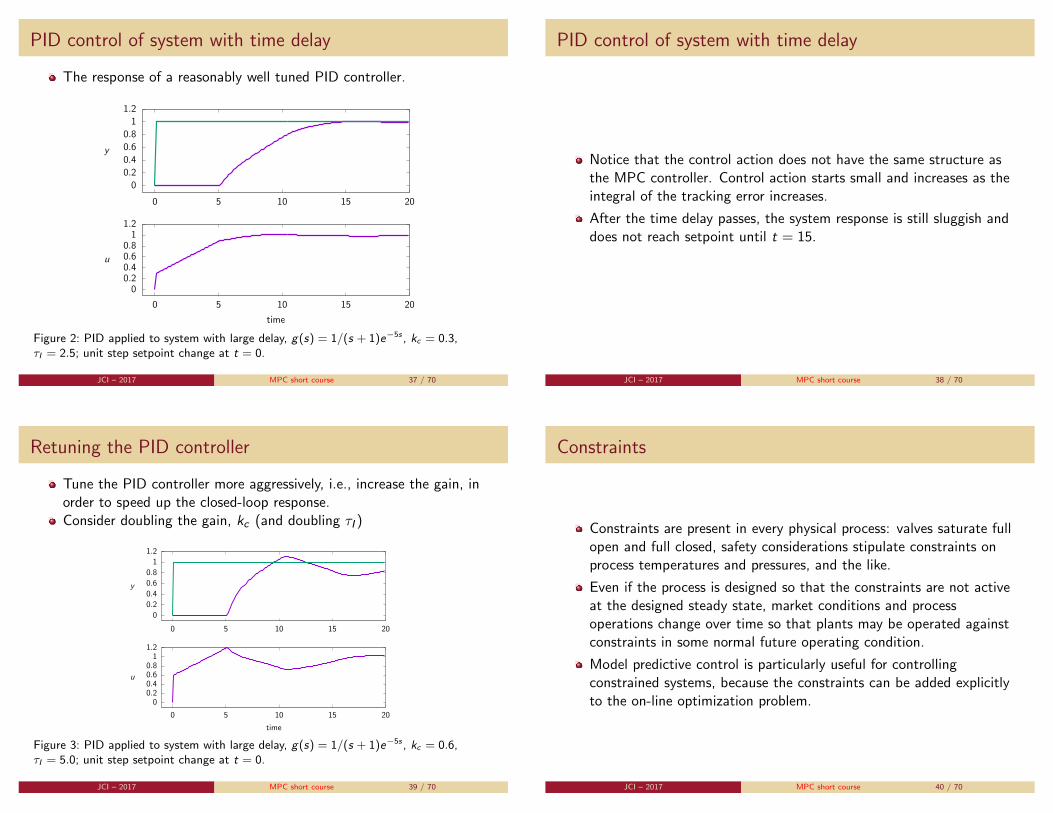
The power of abstraction
process
sensorsactuators
dx
dt= f (x , u)
y = g(x , u)
JCI – 2017 MPC short course 3 / 70
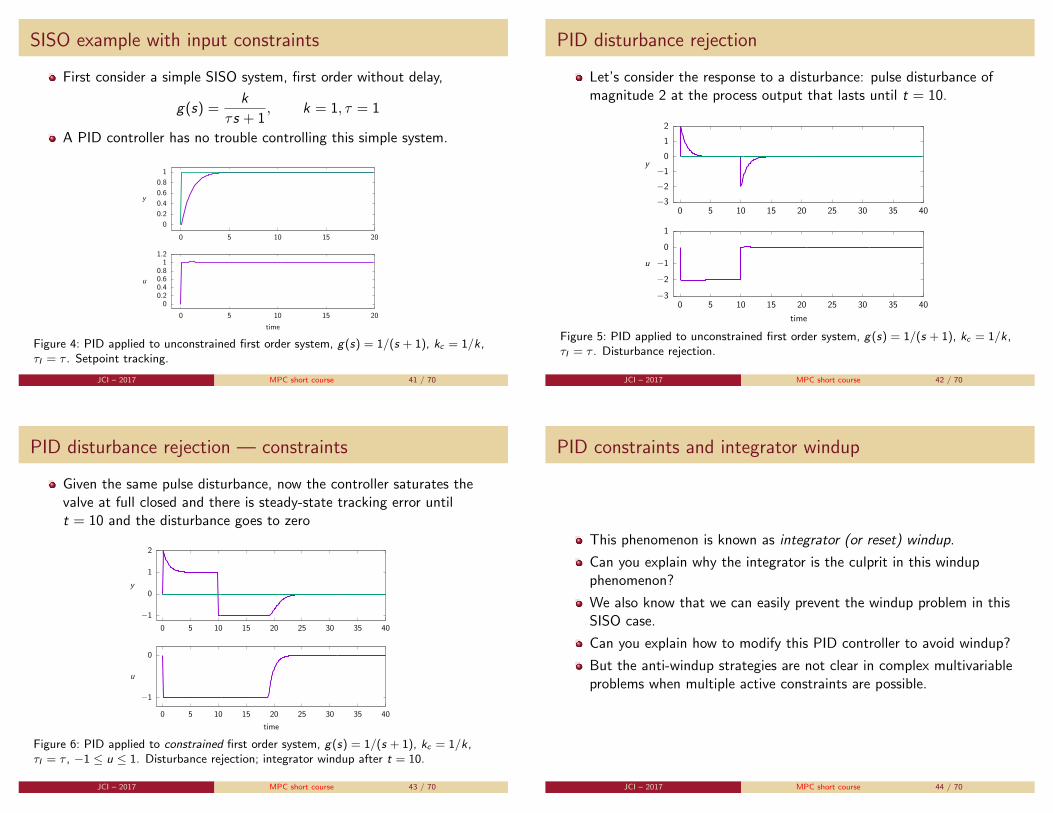
The model predictive control framework
Measurement
MH Estimate
MPC control
Forecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
JCI – 2017 MPC short course 4 / 70

Predictive control
Measurement
MH Estimate
MPC control
Forecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
minu(t)
∫ T
0|ysp − g(x , u)|2Q + |usp − u|2R dt
x = f (x , u)
x(0) = x0 (given)
y = g(x , u)JCI – 2017 MPC short course 5 / 70
State estimation
Measurement
MH Estimate
MPC control
Forecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
minx0,w(t)
∫ 0
−T|y − g(x , u)|2R + |x − f (x , u)|2Q dt
x = f (x , u) + w (process noise)
y = g(x , u) + v (measurement noise)
JCI – 2017 MPC short course 6 / 70
Industrial impact of the research
Planning and Scheduling
Validation Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Steady-state layerI RTO optimizes steady-state
modelI Optimal setpoints passed to
dynamic layer
Dynamic layerI Controller tracks the setpointsI Linear MPC
(replaces multiloop PID)
JCI – 2017 MPC short course 7 / 70
Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
JCI – 2017 MPC short course 8 / 70

Impact for 13 ethylene plants (Starks and Arrieta, 2007)
Hydrocarbons AC&O 17
Advanced ControlAdvanced Control& Optimization& Optimization
We’re Doing it For the Money
$0
$10,000,000
$20,000,000
$30,000,000
$40,000,000
$50,000,000
$60,000,000
1Q 2
000
3Q 2
000
1Q 2
001
3Q 2
001
1Q 2
002
3Q 2
002
1Q 2
003
3Q 2
003
1Q 2
004
3Q 2
004
1Q 2
005
3Q 2
005
1Q200
6
3Q200
6
$0
$100,000,000
$200,000,000
$300,000,000
$400,000,000
$500,000,000
$600,000,000
Cumulative Quarterly
JCI – 2017 MPC short course 9 / 70
Broader industrial impact (Qin and Badgwell, 2003)
Area Aspen Honeywell Adersa PCL MDC TotalTechnology Hi-Spec
Refining 1200 480 280 25 1985
Petrochemicals 450 80 - 20 550
Chemicals 100 20 3 21 144
Pulp and Paper 18 50 - - 68
Air & Gas - 10 - - 10
Utility - 10 - 4 14
Mining/Metallurgy 8 6 7 16 37
Food Processing - - 41 10 51
Polymer 17 - - - 17
Furnaces - - 42 3 45
Aerospace/Defense - - 13 - 13
Automotive - - 7 - 7
Unclassified 40 40 1045 26 450 1601
Total 1833 696 1438 125 450 4542
First App. DMC:1985 PCT:1984 IDCOM:1973 PCL: SMOC:IDCOM-M:1987 RMPCT:1991 HIECON:1986 1984 1988
OPC:1987
Largest App 603x283 225x85 - 31x12 -
JCI – 2017 MPC short course 10 / 70
Linear differential equations
The linear continuous time model is a set of n first-order linear differentialequations
dx
dt= Ax + Bu
y = Cx + Du (1)
in which
x state n-vectoru manipulated input m-vectory measured output p-vector
JCI – 2017 MPC short course 11 / 70
SISO and system order
dx
dt= Ax + Bu
y = Cx + Du
For single input, single output (SISO) systems, m = 1 and p = 1, butn, known as the order of the system, may be greater than one (evenfor SISO systems).
The matrix D is often zero. It represents a direct connection from theinput to the output.
If the transfer function discussed below has numerator anddenominator with equal orders, then D 6= 0.
JCI – 2017 MPC short course 12 / 70

Transfer function model
In the Laplace transform domain, we consider the Laplace transform of theinput u(t), denoted u(s), and the output y(t), denoted y(s). The linearmodel is then the transfer function G (s) relating the input to the output
y(s) = G (s)u(s)
u(s) y(s)G (s)
JCI – 2017 MPC short course 13 / 70
Converting between ODEs and transfer functions
Example 1 (First-order system)
We are probably already familiar with the first-order system and itstransfer function
G (s) =k
τs + 1
with gain k and time constant τ . Find the corresponding A,B,C ,D in thetime domain differential equations.
JCI – 2017 MPC short course 14 / 70
First-order system
Solution
First take the relation
y(s) = G (s)u(s) =k
τs + 1u(s)
Rearrange to(τs + 1)y(s) = ku(s)
Invert back to the time domain using L(dy/dt) = sy(s)− y(0) withdeviation variables so x(0) = 0 and y(0) = Cx(0) = 0.
τdy
dt+ y(t) = ku(t)
JCI – 2017 MPC short course 15 / 70
First-order system
Solution
Identify x(t) = y(t) and have the state space form
dx
dt= −1
τx +
k
τu
dx
dt= Ax + Bu
y = x y = Cx + Du
We see that the differential equation is first order, n = 1, and that
A = −1
τB =
k
τC = 1 D = 0
JCI – 2017 MPC short course 16 / 70

Higher-order system
Next we work an example where the order of the differential equation ishigher than one.
Example 2 (Second-order system)
Consider the general second-order system corresponding to the transferfunction
G (s) =k
τ2s2 + 2ζτs + 1
with gain k, free time constant τ , and damping coefficient ζ. Find thecorresponding A,B,C ,D in the time domain differential equations.
JCI – 2017 MPC short course 17 / 70
Second-order system
Solution
We proceed as in the previous example and note that
L(d2ydt2
)= s2y(s)− y ′(0)− sy(0). If the system is initially at steady state,
in deviation variables we have that y(0) = y ′(0) = 0, giving
L(d2ydt2
)= s2y(s), and L
(dydt
)= sy(s). Substituting these into
y(s) = G (s)u(s) and multiplying both sides by the denominator of G (s)gives
τ2 d2y
dt2+ 2ζτ
dy
dt+ y = ku
JCI – 2017 MPC short course 18 / 70
Second-order system
Solution
Note that to convert this to a set of first-order differential equations, werequire two states. Let x1 = dy/dt and x2 = y . Then the second-orderdifferential equation above can be expressed as
τ2 dx1
dt= −2ζτx1 − x2 + ku
and we add the second differential equation that defines the relationshipbetween x1 and x2
dx2
dt= x1
JCI – 2017 MPC short course 19 / 70
Second-order system
Solution
We can rearrange these two differential equations into the state spaceform of (1) and write them as a single vector differential equation
d
dt
[x1
x2
]=
[−2ζτ
−1τ2
1 0
] [x1
x2
]+
[kτ2
0
]u
y =[0 1
] [x1
x2
]and we have identified the coefficients
A =
[−2ζτ
−1τ2
1 0
]B =
[kτ2
0
]C =
[0 1
]D = 0
JCI – 2017 MPC short course 20 / 70

Discrete time linear difference equations
For discrete time systems, we have a sample time, denoted ∆, and weare interested in the state, input and output of the system only at thesample times, t = k∆.
The linear difference equation that represents the behavior at thesample times is given by
x(k + 1) = Adx(k) + Bdu(k)
y(k) = Cdx(k) + Ddu(k) (2)
The following formulas let us convert from the continuous timedifferential equation model to the discrete time model differenceequation model
Ad = eA∆ Bd = A−1(eA∆ − In)B Cd = C Dd = D (3)
JCI – 2017 MPC short course 21 / 70
Formulas are exact!
Note that if u(t) is a constant between samples (known as azero-order hold), then these formulas are exact and there is noapproximation error such as we would have if we used an Eulermethod to approximate the time derivative in (1).
Note also that if A is singular (one or more of its eigenvalues arezero), A−1 does not exist and the formula for Bd is not defined.
You can obtain Bd from the following relationship that does notrequire A−1
exp
(∆
[A B0 0
])=
[Ad Bd
0 I
]
JCI – 2017 MPC short course 22 / 70
Convert the first-order system to discrete time
Example 3 (First-order discrete time system)
Convert the first-order continuous time system with time constant τ andgain k to the discrete time system with sample time ∆.
Solution
We have already found the CT state space model is:A = −1/τ , B = k/τ ,C = 1, D = 0. Using the CT to DT conversion formulas (3) gives
Ad = e−∆/τ Bd = k(1− e−∆/τ ) Cd = 1 Dd = 0
JCI – 2017 MPC short course 23 / 70
Why discrete time models?
Note that the discrete time model is extremely convenient for computersimulation. An example SISO simulation for a second-order system wouldbe:
nts = 100; tfin = nts*delta;
tout = linspace (0, tfin, nts)';
x = zeros(2, nts); y = zeros(1, nts); u = sin(w*tout);
xp = x0;
for k = 1: nts
x(:,k) = xp;
% take measurement
y(k) = Cd*x(:,k);
% update process
xp = Ad*xp + Bd*u(k);
end
JCI – 2017 MPC short course 24 / 70

Software for model conversions
The conversions between model forms can be carried out conveniently inMatlab or Octave. Useful functions: ss, c2d, and tf.
1 sys = ss(A,B,C,D). Enter a general system using a continuous timestate space model. D is usually zero.
2 dsys = c2d(sys, delta). Convert from a continuous time systemto a discrete time system using sample time delta.
3 Ad = dsys.A, Bd = dsys.B, Cd = dsys.C, Dd = dsys.D
commands extract the state space Ad ,Bd ,Cd ,Dd state spacematrices of the system dsys. Note that the state space model is incontinuous time, (1), or discrete time, (2), depending on whether thesystem dsys is in continuous or discrete time.
4 sys = tf(num, den). Convert from a transfer function model to acontinuous time system. The vectors num and den are the coefficientsof the s polynomial in the numerator and denominator of the transferfunction.
JCI – 2017 MPC short course 25 / 70
More fine print
Use the help function at the Matlab or Octave prompt to find outmore options for the calling and return arguments for these functions.
Note that you must use expm and not exp in Matlab or Octavewhen exponentiating a matrix in the formula for Ad and Bd .
JCI – 2017 MPC short course 26 / 70
PID feedback control
Consider the process g and feedback controller gc with output disturbanced and setpoint ysp
gc g
−
y
d
uysp
PID controller takes control action based on current tracking errorand integral (and derivative) of tracking error,
u(t) = kc
(e(t) +
1
τI
∫ t
0e(t ′)dt ′ + τd
d
dte(t)
), e = ysp − y
The control engineer adjusts directly tuning parameters kc , τi , τd .
JCI – 2017 MPC short course 27 / 70
Predictive control
Pre
sen
t
FuturePast value of
control objective
k + 2k + 1kk − 1
x(t)
t
u(t)
Model.
x(k + 1) = Ax(k) + Bu(k)
y(k) = Cx(k)
JCI – 2017 MPC short course 28 / 70

Predictive control
Control Objective.
V (x ,u) =N−1∑j=0
`(x(j), u(j)
Constraints.
Du(k) ≤ d , k = 0, 1, . . .N − 1
Hx(k) ≤ h, k = 0, 1, . . .N − 1
Optimization.minu
V (x ,u)
subject to the model and constraints.
JCI – 2017 MPC short course 29 / 70
Predictive control
Stage cost.
`(x , u) = |ysp − Cx(j)|2Qy+ |u(j)− u(j − 1)|2S
The matrices Qy (p × p) and S (m ×m) are the primary tuningparameters in this approach, and they are usually chosen to bediagonal matrices.
Let e = ysp − Cx . Then each term above is a sum of squares
[e1 e2 . . . ep
]Qy1
Qy2
. . .
Qyp
e1
e2
. . .
ep
=
Qy1e21 + Qy2e
22 + · · ·+ Qype
2p
JCI – 2017 MPC short course 30 / 70
Predictive control
If you wish to have tight control in certain outputs in the y -vector,you choose the corresponding diagonal elements of Qy large.
If you wish to use only small manipulated variable changes in someactuator, you choose the corresponding diagonal elements of S large.
The loop responds quickly (tight control) when Qy ’s elements arelarge relative to S ’s and responds slowly (loose control) with thereverse tuning.
Qy � S Aggressive control
S � Qy Cautious control
Qyi � Qyj Output (sensor) i is more “important” than output j
Si � Sj Input (actuator) i is more “expensive” than input j
JCI – 2017 MPC short course 31 / 70
MPC feedback control
The control “law” is the outcome of the optimization. We do not(usually) have a simple closed form like in PID.
The tuning parameters are Qy , S , i.e., the weights on inputs andoutputs
Prediction horizon N is not a tuning parameter. We choose it largeenough to “see” the effects of the inputs on the outputs, but smallenough to have a tractable computation. In favorable cases we canmake N =∞.
We can also use some of the constraint parameters as additionaltuning parameters (rate of change constraints)
JCI – 2017 MPC short course 32 / 70

Difficult dynamics
Nonminimum phase systems (time delays, right half-plane zeros), andhigh order systems limit the gain that can be used in simple feedbackcontrollers without causing instability or excessive control action.
Predictive control does not suffer from this disadvantage because themodel-based forecasting enables the controller to account for theinherent limitations in the process response.Consider the following first order system with time delay
gc g
−
y
d
uysp
g(s) =k
τs + 1e−θs , k = 1, τ = 1, θ = 5
JCI – 2017 MPC short course 33 / 70
Time delays
The large time delay compared to time constant severely limits theachievable closed-loop performance of this system.
Consider a unit step change in setpoint, ysp, at t = 0. What wouldwe expect an “ideal” controller to do in this situation?
The physically intuitive answer is to take immediately the controlaction required to drive the system without delay to the desiredsetpoint and then ignore the large tracking error while waiting for thesystem’s time delay to pass; then the output should rise quickly to thesetpoint.
The predictive controller has this inherent time delay compensationbecause the forecast enables it to see that it should wait for the timedelay to pass before taking further control action.
JCI – 2017 MPC short course 34 / 70
Predictive control of system with time delay
The predictive controller behaves precisely as we expect an idealcontroller to behave. It takes large control action early to achieve thesetpoint and then does nothing further until the time delay passes.
0
0.2
0.4
0.6
0.8
1
1.2
0 5 10 15 20
00.20.40.60.8
11.21.4
0 5 10 15 20
y
u
time
Figure 1: MPC applied to system with large delay, g(s) = 1/(s + 1)e−5s , Q = 1, R = 1,S = 0; unit step setpoint change at t = 0.
JCI – 2017 MPC short course 35 / 70
PID control
Without a model, the PID controller is blind to the delay and musttake control action based on current tracking error and integral (andderivative) of tracking error,
u(t) = kc
(e(t) +
1
τI
∫ t
0e(t ′)dt ′ + τd
d
dte(t)
), e = ysp − y
Even if we choose kc and τI carefully (we’ll set τd = 0), there is onlyso much that we can expect.
JCI – 2017 MPC short course 36 / 70
PID control of system with time delay
The response of a reasonably well tuned PID controller.
0
0.2
0.4
0.6
0.8
1
1.2
0 5 10 15 20
00.20.40.60.8
11.2
0 5 10 15 20
y
u
time
Figure 2: PID applied to system with large delay, g(s) = 1/(s + 1)e−5s , kc = 0.3,τI = 2.5; unit step setpoint change at t = 0.
JCI – 2017 MPC short course 37 / 70
PID control of system with time delay
Notice that the control action does not have the same structure asthe MPC controller. Control action starts small and increases as theintegral of the tracking error increases.
After the time delay passes, the system response is still sluggish anddoes not reach setpoint until t = 15.
JCI – 2017 MPC short course 38 / 70
Retuning the PID controller
Tune the PID controller more aggressively, i.e., increase the gain, inorder to speed up the closed-loop response.Consider doubling the gain, kc (and doubling τI )
0
0.2
0.4
0.6
0.8
1
1.2
0 5 10 15 20
00.20.40.60.8
11.2
0 5 10 15 20
y
u
time
Figure 3: PID applied to system with large delay, g(s) = 1/(s + 1)e−5s , kc = 0.6,τI = 5.0; unit step setpoint change at t = 0.
JCI – 2017 MPC short course 39 / 70
Constraints
Constraints are present in every physical process: valves saturate fullopen and full closed, safety considerations stipulate constraints onprocess temperatures and pressures, and the like.
Even if the process is designed so that the constraints are not activeat the designed steady state, market conditions and processoperations change over time so that plants may be operated againstconstraints in some normal future operating condition.
Model predictive control is particularly useful for controllingconstrained systems, because the constraints can be added explicitlyto the on-line optimization problem.
JCI – 2017 MPC short course 40 / 70
SISO example with input constraints
First consider a simple SISO system, first order without delay,
g(s) =k
τs + 1, k = 1, τ = 1
A PID controller has no trouble controlling this simple system.
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
00.20.40.60.8
11.2
0 5 10 15 20
y
u
time
Figure 4: PID applied to unconstrained first order system, g(s) = 1/(s + 1), kc = 1/k,τI = τ . Setpoint tracking.
JCI – 2017 MPC short course 41 / 70
PID disturbance rejection
Let’s consider the response to a disturbance: pulse disturbance ofmagnitude 2 at the process output that lasts until t = 10.
−3
−2
−1
0
1
2
0 5 10 15 20 25 30 35 40
−3
−2
−1
0
1
0 5 10 15 20 25 30 35 40
y
u
time
Figure 5: PID applied to unconstrained first order system, g(s) = 1/(s + 1), kc = 1/k,τI = τ . Disturbance rejection.
JCI – 2017 MPC short course 42 / 70
PID disturbance rejection — constraints
Given the same pulse disturbance, now the controller saturates thevalve at full closed and there is steady-state tracking error untilt = 10 and the disturbance goes to zero
−1
0
1
2
0 5 10 15 20 25 30 35 40
−1
0
0 5 10 15 20 25 30 35 40
y
u
time
Figure 6: PID applied to constrained first order system, g(s) = 1/(s + 1), kc = 1/k,τI = τ , −1 ≤ u ≤ 1. Disturbance rejection; integrator windup after t = 10.
JCI – 2017 MPC short course 43 / 70
PID constraints and integrator windup
This phenomenon is known as integrator (or reset) windup.
Can you explain why the integrator is the culprit in this windupphenomenon?
We also know that we can easily prevent the windup problem in thisSISO case.
Can you explain how to modify this PID controller to avoid windup?
But the anti-windup strategies are not clear in complex multivariableproblems when multiple active constraints are possible.
JCI – 2017 MPC short course 44 / 70

Simple PID anti-reset windup
for i = 1: nts
%% take measurement
y(i) = x(i);
%% compute PI control
err = ysp(i) - y(i);
utry = Kc*(err + 1/tauI*interr(i));
%% saturation limits on the valve -ulim <= u <= ulim
if (utry >= ulim) u(i) = ulim;
elseif (utry <= -ulim ) u(i) = -ulim;
else u(i) = utry; end
%% update process and integral (sum) of tracking error
if (i == nts) break end
x(i+1) = A*x(i) + B*u(i);
%% stop integrating if valve is saturated (anti-reset windup)
if ( u(i) == utry )
interr(i+1) = interr(i) + err;
else
interr(i+1) = interr(i);
end
end
JCI – 2017 MPC short course 45 / 70
PID control with anti-reset windup
−1
0
1
2
0 5 10 15 20 25 30 35 40
−1
0
1
0 5 10 15 20 25 30 35 40
y
u
time
Figure 7: PID applied to constrained first order system with anti-reset windup,g(s) = 1/(s + 1), kc = 1/k, τI = τ , −1 ≤ u ≤ 1. Disturbance rejection; anti-resetwindup after t = 10.
JCI – 2017 MPC short course 46 / 70
MPC control of constrained system
By contrast, consider the MPC controller behavior
−1
0
1
2
0 5 10 15 20 25 30 35 40
−1
0
1
0 5 10 15 20 25 30 35 40
y
u
time
Figure 8: MPC applied to constrained first-order system, g(s) = 1/(s + 1),Q = 1,R = 1,S = 0,N = 10, −1 ≤ u ≤ 1. Disturbance rejection; no integrator windupafter t = 10.
JCI – 2017 MPC short course 47 / 70
MPC control of constrained system
Notice that the MPC controller quickly moves the output back tosetpoint at t = 10 after the disturbance goes to zero.
There is no windup problem in an MPC controller.
One does not need to design anti-windup strategies.
The influence of constraints is forecast correctly and handledautomatically by an MPC controller. That is one of the trulyattractive features of MPC for industrial practice.
JCI – 2017 MPC short course 48 / 70

Multivariable interactions
A significant advantage of MPC comes to light if we examine stronglyinteracting multiinput multioutput (MIMO) systems, which we knowcan cause problems for multiloop SISO PID controllers.
Consider a two-input, two-output process with the following transferfunction (Ogunnaike and Ray, 1994, pp. 757–758).
G (s) =
[2
10s+12
s+1
1s+1
−410s+1
]
JCI – 2017 MPC short course 49 / 70
Relative gain array (RGA)
The RGA for this process is given by
Λ =
[0.8 0.20.2 0.8
]The RGA indicates that pairing u1–y1, u2–y2 is best considering thesteady-state interactions.
The next figure shows how two SISO PID controllers manage a unitsetpoint change in the first output.
JCI – 2017 MPC short course 50 / 70
Multiloop PID — RGA pairing
A classic case of two controllers fighting with each other.
−0.20
0.20.40.60.8
11.21.4
0 2 4 6 8 10
−0.50
0.51
1.52
2.5
0 2 4 6 8 10
y1y2
time
u1u2
Figure 9: PID control with steady-state pairing (u1–y1, u2–y2), kc1 = 2, τI1 = 2,kc2 = −2, τI2 = 3; setpoint change in y1.
JCI – 2017 MPC short course 51 / 70
Multiloop PID — dynamic considerations
G (s) =
[2
10s+12
s+1
1s+1
−410s+1
]
This pairing is not attractive from the dynamic perspective. Themuch slower u1 input is driving y1 (τ11 = 10) when a ten times fasterinput, u2, could have been used (τ12 = 1).
Similarly, the slow input, u2, drives y2 (τ22 = 10) when the first inputis ten times faster (τ21 = 1).
Dynamic considerations would favor switching to the pairing u2–y1,u1–y2.
JCI – 2017 MPC short course 52 / 70

Multiloop PID — dynamic pairing
−0.20
0.20.40.60.8
11.2
0 2 4 6 8 10
0
1
2
3
4
5
0 2 4 6 8 10
y1y2
time
u1u2
Figure 10: PID control with dynamic pairing (u2–y1, u1–y2), kc1 = 5, τI1 = 2, kc2 = 5,τI2 = 3; setpoint change in y1.
JCI – 2017 MPC short course 53 / 70
Multiloop PID — pairing summary
For this case, dynamics carry the day and the pairing based on speedof response exhibits better setpoint tracking than the pairing basedon steady-state interactions.
These points are all clear for this example, but they will not be soclear if we start to move the two time constants closer to each otherand the dynamic separation of time scales is not so large.
JCI – 2017 MPC short course 54 / 70
MPC of multivariable system
Let’s see what happens if we refuse to choose pairings and allow amultivariable MPC controller to use its model to sort things outautomatically.
−0.20
0.20.40.60.8
11.2
0 2 4 6 8 10
0
1
2
3
4
5
0 2 4 6 8 10
y1y2
time
u1u2
Figure 11: Multi-variable MPC control, Qy = I , S = 0. Setpoint change.
JCI – 2017 MPC short course 55 / 70
MPC of multivariable system
Notice that the performance is essentially deadbeat (i.e. immediate)in moving output y1 to its new setpoint while not disturbing outputy2.
The MPC controller uses its model to forecast exactly what inputtrajectories in both inputs are required to track exactly the setpoint inboth outputs. Interactions are not an issue because the modelforecast accounts for them. (Model error is discussed later.)
Performance is as good or better than the best performance we canachieve using PID with the best tuning constants and the best pairing.
No significant tuning effort for the MPC controller is required toachieve this good nominal performance. We used Q = I , S = 0 forthis deadbeat response.
As we expect, we will have to detune this controller (increase S to useless input) if we want it to accommodate sensor noise, and mismatchbetween the plant and the model.
JCI – 2017 MPC short course 56 / 70
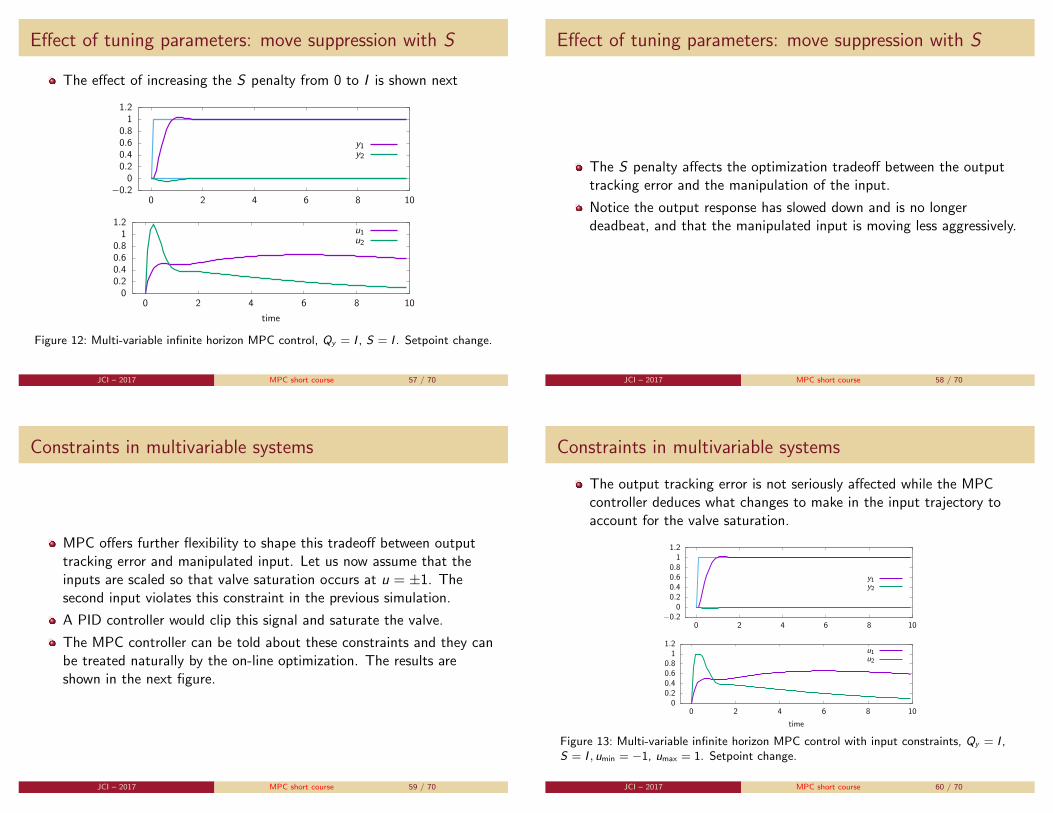
Effect of tuning parameters: move suppression with S
The effect of increasing the S penalty from 0 to I is shown next
−0.20
0.20.40.60.8
11.2
0 2 4 6 8 10
00.20.40.60.8
11.2
0 2 4 6 8 10
y1y2
time
u1u2
Figure 12: Multi-variable infinite horizon MPC control, Qy = I , S = I . Setpoint change.
JCI – 2017 MPC short course 57 / 70
Effect of tuning parameters: move suppression with S
The S penalty affects the optimization tradeoff between the outputtracking error and the manipulation of the input.
Notice the output response has slowed down and is no longerdeadbeat, and that the manipulated input is moving less aggressively.
JCI – 2017 MPC short course 58 / 70
Constraints in multivariable systems
MPC offers further flexibility to shape this tradeoff between outputtracking error and manipulated input. Let us now assume that theinputs are scaled so that valve saturation occurs at u = ±1. Thesecond input violates this constraint in the previous simulation.
A PID controller would clip this signal and saturate the valve.
The MPC controller can be told about these constraints and they canbe treated naturally by the on-line optimization. The results areshown in the next figure.
JCI – 2017 MPC short course 59 / 70
Constraints in multivariable systems
The output tracking error is not seriously affected while the MPCcontroller deduces what changes to make in the input trajectory toaccount for the valve saturation.
−0.20
0.20.40.60.8
11.2
0 2 4 6 8 10
00.20.40.60.8
11.2
0 2 4 6 8 10
y1y2
time
u1u2
Figure 13: Multi-variable infinite horizon MPC control with input constraints, Qy = I ,S = I , umin = −1, umax = 1. Setpoint change.
JCI – 2017 MPC short course 60 / 70

Rate of change constraints
Another practically motivated method for shaping the tradeoffbetween tracking and control action is to constrain rather thanpenalize the rate of change of the input.
Practitioners or operators may be comfortable with some rates atwhich the valves may be moved between each controller execution,but may not know how to translate that speed into an appropriate Spenalty without extensive simulation.
In these situations constraining rather than (or in addition to)penalizing the rate of change of the input is simpler to implement.
JCI – 2017 MPC short course 61 / 70
Rate of change constraints
Assume the initial portion of the input manipulation is unacceptableto the process operators, and they would be more comfortable if uchanged not more than 0.1 in each sample,
−0.1 ≤ ∆u ≤ 0.1
Adding this constraint to the MPC problem produces the results inthe next figure
JCI – 2017 MPC short course 62 / 70
Rate of change constraints
The input now slows down significantly in the early portion of thesetpoint change.
−0.20
0.20.40.60.8
11.2
0 2 4 6 8 10
00.20.40.60.8
11.2
0 2 4 6 8 10
y1y2
time
u1u2
Figure 14: Multi-variable infinite horizon MPC control with rate of change constraints,Qy = I , S = I , ∆umax = 0.1. Setpoint change.
JCI – 2017 MPC short course 63 / 70
Rate of change constraints
The rate of change constraint becomes binding in both inputs. Theslower input manipulation in turn affects the speed of response in theoutput.
This kind of simulation allows one to see directly what penalty mustbe paid in the speed of output tracking if one wishes to impose thisrate constraint on the input.
JCI – 2017 MPC short course 64 / 70

Summary of MPC compared to PID
In this part of the course we have seen that MPC offers significantadvantages compared to PID control in the following situations
1 Difficult dynamics: time delays, right half plane zeros, high ordersystems.
2 Tightly constrained systems: valve saturation, rate of changeconstraints, avoidance of integrator windup.
3 Strongly interacting multivariable systems. No need for pairing, andtrue multivariable control.
Of course MPC does not solve all control problems. The biggestdisadvantage of MPC, or any model-based control system, is thesignificant effort required to obtain a process model and tune thecontroller to handle a variety of plant conditions without humanintervention and constant re-tuning and maintenance.
JCI – 2017 MPC short course 65 / 70
Summary of MPC compared to PID
Given the successful implementation of MPC in the process industries,however, we can conclude that this modeling effort can pay off inimproved profitability, product quality and safety.
The decision about when to implement MPC versus simple, well-tunedPID controllers requires an assessment of the achievable processimprovements versus the time and expense of the modeling effort.
JCI – 2017 MPC short course 66 / 70
MPC can be used with nonlinear models
Finally, nothing restricts the ideas of MPC to linear models.Practitioners are now pursuing the implementation of MPC based onnonlinear, fundamental chemical process models.
dx/dt = f (x , u) y = g(x , u)
The on-line optimization becomes significantly more complex, buttoday’s computational capabilities are already up to the task ofimplementation for reasonably sized process units.
The bottlenecks at this point are, again, obtaining nonlinear processmodels from first principles and operating data, and algorithms forreliably solving the nonlinear MPC optimization.
JCI – 2017 MPC short course 67 / 70
Lab Exercises
Solve the examples in this section and reproduce the figures.Exercise 1.10 (Rawlings and Mayne, 2009)
Example 4
Define a state vector and realize the following models as state spacemodels by hand. One should do a few by hand to understand what theOctave or Matlab calls are doing. Answer the following questions. Whatis the connection between the poles of G and the state space description?For what kinds of G (s) does one obtain a nonzero D matrix? What is theorder and gain of these systems? Is there a connection between order andthe numbers of inputs and outputs?
a G (s) =1
2s + 1
b G (s) =1
(2s + 1)(3s + 1)
c G (s) =2s + 1
3s + 1
d y(k + 1) = y(k) + 2u(k)
e y(k + 1) = a1y(k) + a2y(k − 1) +b1u(k) + b2u(k − 1)
JCI – 2017 MPC short course 68 / 70

Lab Exercises
Exercise 1.11
Example 5
Find minimal realizations of the state space models you found by hand inExercise 4. Use Octave or Matlab for computing minimal realizations.Were any of your hand realizations nonminimal?
JCI – 2017 MPC short course 69 / 70
Further reading I
B. A. Ogunnaike and W. H. Ray. Process Dynamics, Modeling, and Control. OxfordUniversity Press, New York, 1994.
S. J. Qin and T. A. Badgwell. A survey of industrial model predictive controltechnology. Control Eng. Pract., 11(7):733–764, 2003.
J. B. Rawlings and D. Q. Mayne. Model Predictive Control: Theory and Design. NobHill Publishing, Madison, WI, 2009. 576 pages, ISBN 978-0-9759377-0-9.
D. M. Starks and E. Arrieta. Maintaining AC&O applications, sustaining the gain. InProceedings of National AIChE Spring Meeting, Houston, Texas, April 2007.
JCI – 2017 MPC short course 70 / 70