Embed Size (px)
Citation preview

CONTROL ENGINEERING LABORATORY
Model Predictive Control and
Differential Evolution optimisation of
the fuel cell process
Mika Ruusunen, Jani Uusitalo, Markku Ohenoja
and Kauko Leiviskä
Report A No 46, January 2011

University of Oulu
Control Engineering Laboratory
Report A No 46, January 2011
Model Predictive Control and Differential Evolution optimisation of the fuel cell
process
Mika Ruusunen, Jani Uusitalo, Markku Ohenoja and Kauko Leiviskä
University of Oulu, Control Engineering Laboratory
In the future, the energy production will aim at more sustainable methods. Fuel cell
technology is one alternative to the existing technology and its popularity in
distributed energy systems comes from high efficiency, low risk to the environment,
fast dynamic response, and its reliability and durability in different applications. It,
however, requires a reliable source of pure hydrogen.
This report introduces first the production routes of different fuel cell systems. Next,
models of steam reformer, WGS reactor and PEM fuel cell are shortly presented
together with the integrated model of the whole fuel cell system. The model is then
utilised in process identification and control development comparing PI-control with
Model Predictive Control (MPC). Finally, the upper level optimisation using
Differential Evolution (DE) is tested with simulations in Matlab® Simulink® and
results of the control simulations are briefly discussed.
Hakusanat: fuel cell, steam reformer, WGS reactor, MPC, Differential evolution
ISBN 978-951-42-9376-4 University of Oulu
ISSN 1238-9390 Control Engineering Laboratory
P.O. Box 4300
FIN-90014 OULUN YLIOPISTO

TABLE OF CONTENTS
1 INTRODUCTION ......................................................................................................1
2 PROCESS ROUTES FOR FUEL CELL SYSTEMS.................................................2
3 INTEGRATED MODEL OF A FUEL CELL SYSTEM ...........................................5
4 CONTROL AND OPTIMISATION STRUCTURES ................................................9
4.1 Control framework...............................................................................................9
4.2 Optimisation structure........................................................................................11
4.3 Applied model structures for control .................................................................13
5 RESULTS AND DISCUSSION...............................................................................14
5.1 Single input-single output MPC for regulation of H2 flow rate.........................14
5.1.1 Model identification for control..................................................................14
5.1.2 Simulated control tests................................................................................16
5.2 Multivariable control and optimisation..............................................................19
5.2.1 Process modelling for optimisation ............................................................19
5.2.2 MPC with Differential Evolution optimiser ...............................................19
6 SUMMARY..............................................................................................................22
REFERENCES ............................................................................................................24

1 INTRODUCTION
In the future, the energy production will aim at more sustainable methods, saving the
environment and fuels. Fuel cell technology is a key alternative to the existing
technology burning fossil fuels because of its low content of harmful emissions. Its
popularity in distributed energy systems comes from high efficiency, low risk to the
environment, fast dynamic response, and its reliability and durability in different
applications (Ohenoja and Leiviskä 2010).The proton exchange membrane (PEM)
fuel cell has been found suitable for both residential and mobile applications because
it can operate at relatively low temperatures, it has relatively high power density and
its maintenance is simple (Wu and Pai 2009). However, it requires a reliable source of
pure hydrogen. In addition to liquid hydrocarbons such as methanol and ethanol, fuel
cells burn hydrogen produced from renewable sources like biomasses.
The fuel cell system can include several unit processes, but usually it consists of units
for hydrogen production and cleaning and the fuel cell. There are several papers on
modelling, optimisation and control of these separate processes, but only few
concerning the whole productions system (Pukrushpan et al. 2006, Perna 2007, Wu
and Pai 2009). The starting point of this study is the Master’s thesis (Uusitalo 2010),
where a modular dynamic model was constructed and tested for the fuel cell system
consisting of ethanol reforming, hydrogen purification in a membrane WGS reactor
and a PEM fuel cell. The whole system is controlled by a simple PI controller. This
work extends the study to Model Predictive Control (MPC) and optimising its
operation point using Differential Evolution (DE) algorithm.
This report is organised as follows: First, process description is given and routes of
fuel processing presented. Next, modelling principles and the simulation environment
are shown, together with the integrated model of a fuel cell system. The model is then
utilised in process identification and control development comparing PI control with
MPC and DE. Finally, results of the control simulations are briefly discussed.
1

2 PROCESS ROUTES FOR FUEL CELL SYSTEMS
Pukrushpan et al. (2006) show different process routes for fuel cell systems using
different fuels (Figure 1). They start from the simple system, where hydrogen is taken
from a container to the fuel cell. The next solution is the steam reforming of methanol
which is based on vaporising methanol and feeding it to the reforming unit. The
produced syngas is cleaned (carbon dioxide removed) at the low temperature in WGS
reactor and preferential oxidation. Additionally, Pukrushpan et al. (2006) give process
routes for partial oxidation of gasoline and natural gas. Gasoline process starts with
vaporisation and partial oxidation followed by high and low temperature WGS
reactors together with preferential oxidation. Using natural gas resembles the previous
process, but it has desulphuriser instead of vaporisation.
Figure 1. Different process routes in fuel cell systems (Pukrushpan et al. 2006)
Tosti (2006) shows several process routes for ethanol reforming and membrane
reactors. The simplest way is to use a common steam reformer followed by membrane
separation (Figure 2). This may lead to unnecessary CO emissions. Another option is
to carry out both reforming and separation in one membrane reactor. The third variant
shown in Figure 2 is the reformer followed by a membrane WGS reactor. This is the
alternative simulated in this work.
2

Figure 2. Process alternatives in combining steam reforming and membrane reactors
(Tosti 2008).
Perna (2007) presents a stationary process model for a fuel cell system consisting of
steam reforming of ethanol, WGS reactor, preferential oxidation and a PEM fuel cell
(Figure 3). In this case, the anodic exhaust is recycled to the reformer unit to heat the
reformer.
Figure 3. Combining a steam reformer and a PEM fuel cell. (Perna 2007)
The time delay from the hydrogen feed to the fuel cell forms the main control problem
in the fuel cell systems. To avoid the stack H2 starvation, a rapid and robust response
after the setpoint changes in the stack current is required (Pukruspan et al. 2006).
3

Otherwise the stack might be permanently damaged. As noted in the same reference,
the oversupply of hydrogen easily leads to fuel losses. Compensation for this delay
requires model-based control techniques. However, PI controllers, both SISO and
MIMO, have been mainly used (Lauzze and Chmielewski 2006, Woo and Benzinger
2007, Methekar et al. 2007. Uusitalo 2010). Also some model-based controller
designs have been reported (Zhang 2008, Wu et al. 2009).
Pukruspan et al (2006) present a control-oriented model of the fuel cell system shown
in Figure 4. They solve the resulting two-input two-output (TITO) problem using
Bristol’s Relative Gain Array (RGA) method. Their paper shows a low order (10
states) mechanistic model in Simulink® that has been calibrated with a high order (300
states) model developed in Dymola (Eborn et al. 2003). They have defined the control
problem as H2-on-demand problem with three targets: to protect the stack from
damage caused by H2 starvation, to protect CPOX from overheating and to keep the
overall efficiency of the system high.
Figure 4. Fuel cell system from Pukrushpan et al. (2006).
Wu & Pai (2009) report on multivariable fuzzy logic control of fuel cell system with
methanol reforming. They introduce a model for methanol reformer, heat exchanger,
WGS reactor and preferential oxidation reactor. Ballard 5 kW stack with 35 cells in
series is also modelled. The best results were achieved by using two incremental
fuzzy controllers – one controlling the stack temperature and the other the hydrogen
pressure of the anode using the water flow to the heat exchanger and the methanol
flow. The system has been tested in Matlab® Simulink®. Other applications of fuzzy
logic have also been reported (Shen et al. 2002, Schumacher 2004).
4

3 INTEGRATED MODEL OF A FUEL CELL SYSTEM
This study concerns with modelling of a fuel cell system consisting of steam
reforming of ethanol followed by WGS separation and PEM fuel cell. Following
chapters consider control and optimisation of the system.
The starting point of the reformer model is the earlier simple model (Ohenoja 2008)
that included only the main reforming reaction
2 5 2 2 23 0 2 6C H OH H CO H+ ⎯⎯→ + (r1)
The model is based mainly on kinetic model by Mas et al. (2008) which is validated
with literature data
, ,ethanol , j 0, ethanol
1 1exp873
a j jj
Er k p
R Tα⎧ ⎫⎛ ⎞⎪ ⎛ ⎞= − −⎨ ⎜ ⎟ ⎜ ⎟
⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭
⎪⎬
2
(1)
where rethanol,j is the ethanol conversion in reaction j, (mol/min·mg),
k0, j is a kinetic constant for reaction j (mol/min/mg/atmα),
Ea, j is activation energy for reaction j (J/mol),
α,j is a stoichiometric constant for reaction j and
Pethanol is the partial pressure of ethanol.
Parameters are given in Mas et al. (2008). Index j refers to reaction r1 and reaction r2
that produces also carbon monoxide
. (r2) 3 2 2 0 2 4CH CH OH H CO H+ ⎯⎯→ +
The reforming reactor is modelled as a continuous stirred-tank reactor (CSTR) in
Matlab® Simulink®. The model includes five components: ethanol, water, hydrogen,
carbon dioxide and carbon monoxide. Some assumptions are done:
• reaction is assumed isothermal and
• reactor volume and pressure are constants.
5

The material balance for the consumptions of ethanol and water is written as
, ,i
i in i out cat idN N N mdt
= − − r
2
(2)
where Ni,in and Ni,out are molar flows of a component in and out of the
reactor
mkat is the mass of the catalyst and
ri is the reaction rate (mol/min/mg).
Products are produced according to stoichiometric constants. Simulink® models are
shown in Uusitalo (2010).
Hydrogen purification takes place in WGS membrane reactor that has been modelled
in Simulink® with a series of CSTRs. The water gas shift reaction is reversible and
exothermal
2 2
41,4 /CO H O CO H
H kJ mol+ ←⎯→ +
Λ = (r3)
Model itself is based on Huang et al. (2005). The purification targets to less than 10
ppm concentration of CO simultaneously recovering most of hydrogen for the fuel
cell. WGS membrane reactor modelled is a hollow-fibre membrane module with
catalyst particles packed inside the fibres. Following assumptions are originally made
(Huang et al. 2005):
(1) the hollow-fibres are CO2-selective
(2) CO2 and H2 are able to permeate through the membrane
(3) membrane permeability is fixed and does not change with temperature
(4) there is no temperature variations in the radial direction inside a hollow fibre
(5) the module is adiabatic and operates at the steady state
(6) there is no axial mixing
(7) the pressure drops on both lumen and shell sides are negligible.
6

In this case, however, an isothermal system is assumed. The model assumes a
commercial Cu/ZnO/Al2O3 catalyst, from which lot of data is available,
Following reactions take place in the fuel cell:
Anode: 2 2 2H H + −⎯⎯→ + e
2O
(r4)
Cathode: (r5) 2½ 2 2O H e H+ −+ + ⎯⎯→
Cell: (r6)
2 2 2½ electricity heatH O H O+ ⎯⎯→ + +
There are several models for 5kW Ballard V fuel cell that is chosen in the literature
(Amphlett et al. (1996), Khan & Iqbal (2005b), Corréa et al. (2004)). The model used
here is from Ohenoja & Leiviskä (2008) that in addition to electro-chemical and flow
models includes also the concentration overpotential.
The heart of the fuel cell model is, however, the electro-chemical model that is
usually written as follows (Ohenoja and Leiviskä 2010)
( ){ }{ }( ){ }
{ }max
3 52 2
1 2 3 4 2
1, 229 0,85 10 ( 298,15) 4,3085 10 ln
ln( ) ln( )
ln(1 )
Nernst Act ohm conc
H O
O
M C
ii
V E V V V
T T
T T i T C
i R R
B
ξ ξ ξ ξ
− −
= − − −
= − ⋅ − + ⋅
− + + +
− +
− −
0,5P P
(3)
In Equation 3 Vact, Vohm and Vconc describe different losses ENernst is the
thermodynamic potential. The constant 1,229 represents the reference potential at
standard state, T is the temperature and PH2 and PO2 are the partial pressures of
hydrogen and oxygen. The activation overpotential is calculated using an
experimental equation. Parameters ξ1 … ξ4 are experimentally defined constants. In
the expression for Vohm, i denotes the current, RM is the equivalent membrane
resistance to proton conduction and RC is the equivalent contact resistance to electron
conduction. RM depends on membrane resistivity, membrane thickness and active cell
7

area. On the other hand, the membrane resistivity depends on the parameter λ. In the
expression for Vconc, B is a parameter depending on the cell type and its state and imax
is the maximum current density.
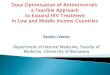
All three models are connected as an integrated model in Uusitalo (2010). The overall
model includes also a simple PI controller that controls hydrogen production with
water/ethanol ratio. Figure 5 shows the system’s ability to follow step and ramp
changes in the hydrogen demand. PI controller can follow the step change with a
delay, but cannot follow the ramp change. Increasing the I-term in the last case makes
the system a little faster, but simultaneously it makes the response oscillatory.
0 1000 2000 3000 4000 5000 6000
120
140
160
180
200
220
240
260
Time
Cur
rent
ResponseSet point
0 1000 2000 3000 4000 5000 6000140
160
180
200
220
240
260
Time
Cur
rent
ResponseSet point
Figure 5. Systems ability to follow step and ramp changes in the current demand. PI
controller is used.
8

4 CONTROL AND OPTIMISATION STRUCTURES
Control of the integrated fuel cell system presented in the previous chapter is further
studied under load and input disturbances. For this, simulations with the system model
with several MPC realisations will be performed. In addition, optimisation
possibilities of the ethanol reforming process in order to minimise raw material
consumption are investigated by integrating a higher level optimisation algorithm
with MPC framework. This study focuses on the hydrogen production in the
beginning of the process chain. Preliminary process simulations have revealed that at
least in this case the reformer and WGS reactor play a major role in fuel cell dynamics
and economy.
4.1 Control framework
The simulated fuel cell process exhibits large delays from inputs to outputs mainly
due to the slow purification stage at WGS reactor. From the control point of view, it
then forms a stiff system having a reactor with slower dynamics compared to the other
two process stages. When the control target is to stabilise the power output of the fuel
cell and enable a fast response to load changes, the control development should focus
on compensating for the large delay time with predictive model-based methods.
Model predictive controller utilises an identified process model to predict and
optimise the behaviour of the controlled system according to some cost function (see
for details Qin & Badgwell 2003). In Figure 6, the proceeding of a SISO (single input
–single output) MPC calculation is presented. The controller acts at sampling instants
k to provide a control signal to the system. At each time instant the future behaviour is
estimated by the model within the range of the prediction horizon P. The estimated
outputs at the range of the control horizon are due to an input sequence calculated by
the optimisation algorithm. The first control move from the best input sequence
passing the constraints (ymax, ymin, xmax, xmin) and minimising the cost function is then
chosen to be realised. The above cycle is repeated indefinitely utilising the latest
measurement information and recalculating the control sequences.
9

Figure 6. Principle of the model predictive control method. (Matlab 1)
In this study, the control framework includes MPC and additionally a higher level
optimiser (Figure 7). In the figure, ‘process model’ is the integrated model of the fuel
cell system described in Section 3, whereas ‘control models’ include the
approximations of the simulated true system as shown in the next Chapter.
Process model
Control models- Linear dynamic models- Neural networks
Parameter identification
Model Predictive Controller
Process optimisation (Differential Evolution)
DisturbancesSet-points
Figure 7. A control framework for the simulated fuel cell process.
The simulated process is additionally introduced with an input disturbance in the form
of band-limited white noise. Resulting signal behaviour is also modelled and utilised
in MPC compensating for the effects of this type of a noise source.
10

4.2 Optimisation structure
Economic and energy issues have an effect on the applicability of the above described
fuel cell process. In order to maintain cost effective production of hydrogen, raw
material consumption and energy usage must be kept as low as possible. Then, the
conversion efficiency of the reformer unit has an impact on both values. This case
study concentrates on the maximisation of the conversion efficiency with respect to
the required level of hydrogen production and constraints.
A hierarchical optimisation approach is adopted for the maximisation of the
conversion efficiency in the reformer unit. Therefore, a higher level optimiser is
implemented to provide optimal settings for the steady state, namely the setpoint for
the lower lever controller (Figure 7). MPC is then utilised for dynamic control
purposes to drive the process to its new setpoint calculated by the optimiser. In this
way, the constraints and detailed dynamics can be accounted for in the form of MPC,
while its setpoint calculated by the optimiser should equal to preferable process
conditions that minimise energy and raw materials usage. (see for example Qin &
Badgwell 2003)
Differential evolution (DE) algorithm was chosen for the optimisation task due to its
preferable properties (see for DE details for example Price et al. 2005). Firstly, it
belongs to the category of global optimisers that are capable of avoiding local
minima, at least with a proper configuration. Secondly, the algorithm operates with
real values allowing simple and fast optimisation. Thirdly, the number of design
parameters is low – initially there are eight parameters to be set that are related to the
population size, minimum and maximum allowed, initial values of the population
members and crossover probability. The principal optimisation framework is depicted
as MATLAB® Simulink® diagram in Figure 8.
11

WGS-reactor
syöttöH2 partialp
H2 (mol/s) T _reformer
T_in
Reformer
W/E-ratioT_inN_totP
gas out
conversion
PEM fuel cell
H2 partialp
H2 (mol/s)
Air
I/U
PEM data
P
P
MPC Controller
MPCmv
mo
ref
DE optimiser
DE_MPC(u)
Air_feed
120
Figure 8. Optimisation framework.
Two manipulated variables, namely the water-ethanol ratio and total flow are selected
to study the optimisation framework. Also two outputs, the conversion efficiency and
hydrogen flow rate after the WGS reactor are included in analysis. The general form
of the cost function to be minimised in this case is written as
{ })_()()(()_(100(min 2423121 2statesteadyHrhkuhkuhstatesteadyconversionh H −++−+− ,
where h1-4 constants are tuning parameters, conversion(steady_state) is the steady
state value of the conversion efficiency after an input change, u1-2(k) are manipulated
water-ethanol ratio and the total molar flow rate respectively, rH2 is the required
hydrogen flow rate, and H2(steady_state) is the hydrogen flow rate at the
corresponding time instance.
The steady state equals to estimated future value after 200 seconds. The cost function
is designed to penalise deviations from the setpoint and to favour high conversion. In
addition, the low total flow and high water-ethanol ratio are preferable and minimise
the cost function. The optimiser is launched every time when the hydrogen setpoint
changes and a new steady state has been reached. After the optimisation routine, the
maximum conversion efficiency found is introduced as a new setpoint to the model
predictive controller.
12

4.3 Applied model structures for control
The proper model for designing MPC is needed to describe process dynamics and
relations between important variables. In this study, empirical modelling approach is
applied. It includes the following, partly iterative steps:
• data collection,
• data preprocessing,
• model structure selection,
• identification of model parameters, and
• validation and testing the models.
It is assumed here that dynamics and input-output relations of the process can be
modelled applying a linear model. This assumption simplifies the prediction and
optimisation stages since the number of free parameters in the model can be kept low.
Also, the maintenance of the model is straightforward. Of course, the assumption of
the model goodness must hold. A general structure for linear models is defined here as
A(q)y(t) = B(q)u(t) + C(q)e(t), (4)
where A(q) is the parameters of q-1 output y(t) delays, B(q) is the same for inputs u(t)
and C(q) for the approximated unmeasured disturbance e(t). Input disturbance model
in this case is formulated as an integrator driven by the white noise. This includes a
state-space model that approximates random step-type innovations of process noise
when applied to simulation in the form of unmeasured disturbances (Figure 9).
Input disturbance modelWhite noise Unmeasured
disturbance
Input disturbance modelWhite noise Unmeasured
disturbance Figure 9. Input disturbance model for the MPC driven by band-limited white noise.
The empirical models are constructed utilising simulated process data. Therefore,
simulations with the process model in open loop are performed. Data for modelling is
acquired introducing random input changes to the process resulting in output
variation. During the simulation campaign, variables having the strongest effect on
output changes are pointed out in order to be chosen to manipulated variables.
13

5 RESULTS AND DISCUSSION
5.1 Single input-single output MPC for regulation of H2 flow rate
The control concept is first tested in the presence of a step change to the required
hydrogen flow rate. This includes a disturbance addition to the total feed of the water-
ethanol solution into the reformer. The magnitude of the band-limited white noise
source is set to maximum ±10% of the total feed.
5.1.1 Model identification for control
An autoregressive moving average model with exogenous input (ARMAX) is chosen
to the model structure for approximating the hydrogen flow rate. The model input is
the water-ethanol feed ratio into the reformer having here a strong effect on hydrogen
production, similarly as in (De Falco 2011). At first, the mean is removed from the
model variables to synchronise their magnitudes. Then, identification of the model
parameters is performed utilising a prediction error method. Identification results are
presented in Figure 10. The following parameter values of the best performed model
are achieved using the separate training data depicted in figure:
B(q) = -0.005027 q^-158 - 0.0002274 q^-159, (5)
showing that the model has no poles and it includes two delay terms at time lags of
158 and 159 seconds. Thus, according to the model it seems that the simulated
process exhibits large dead time and delay from input to output. The modelling
performance is measured with the index describing the percentage of the output
variations that is reproduced by the model. For the identified model it is 57.13.
Discrete state-space presentation is needed for control simulations and results in 202
states. The input disturbance model (state-space model with one input and output,
altogether 3 free parameters) is identified separately and integrated to the controller
model at the MPC block in MATLAB® Simulink® environment. The same integration
is done with the linear ARMAX model.
14

0 2000 4000 6000 8000 10000 12000-10
-8
-6
-4
-2
0
2
4
6
8x 10
-3
TimeTraining dataTesting data
H2 flow rate,[kmol/min], mean removed
0 2000 4000 6000 8000 10000 12000-10
-8
-6
-4
-2
0
2
4
6
8x 10
-3
TimeTraining dataTesting data
0 2000 4000 6000 8000 10000 12000-10
-8
-6
-4
-2
0
2
4
6
8x 10
-3
TimeTraining dataTesting data
H2 flow rate,[kmol/min], mean removed
Figure 10. Modelling results of the ARMAX-model for the water-ethanol ratio as
input and the hydrogen flow rate as modelled output. Solid line: modelled hydrogen
flow rate, dotted line: simulated true output. Mean removed.
Another model candidate for the control purposes is an autoregressive model with
exogenous input (ARX). It is constructed to have two inputs, namely water-ethanol
ratio and the total flow of the ethanol solution. In this case, parameter identification
results in a model with one pole (one lagged output as an input), together with two
other inputs both with delays of 220 seconds. The parameters of the model are
presented as
A(q) = 1 - 0.996 q^-1,
B1(q) = -3.546e-005 q^-220, (6)
B2(q) = -0.008549 q^-220,
where B1 and B2 are parameters for the water-ethanol ratio and total feed flow, A(q)
is the parameter for one second output delay, respectively. The results of the model
identification are presented in Figure 11.
15

Training dataTesting data
H2 flow rate,[kmol/min], mean removed
0 2000 4000 6000 8000-8
-6
-4
-2
0
2
4
6
8x 10
-3
TimeTraining dataTesting data
H2 flow rate,[kmol/min], mean removed
0 2000 4000 6000 8000-8
-6
-4
-2
0
2
4
6
8x 10
-3
Time
Figure 11. Identification results of the ARX-model with two inputs: water-ethanol
ratio and total feed to the reformer unit. Solid line: modelled hydrogen flow rate,
dotted line: simulated true output. Mean removed.
It can be seen from the figure that the ARX-model smoothly follows the simulated
true output. This is because of one output term in the inputs and inclusion of the total
feed variable to the model. The fit index calculated over the training and testing data
ranges is somewhat better than with ARMAX model, namely 67.67. However, the
resulted model structure requires more calculation power and the dynamics of the
process is not fully captured. Instead, in preliminary testing the process dynamics is
modelled too slow resulting in unstable controller behaviour. It can be concluded from
the modelling task that the most critical parameter in this case for the successful
modelling is the capture of the process dynamics. The simpler ARMAX-model seems
to fulfil this requirement better.
5.1.2 Simulated control tests
As a reference for control comparison, PI controller developed formerly (see Section
3) was also utilised to control the hydrogen flow rate under described input
disturbances and step change. Controller uses hydrogen consumption as a setpoint and
controls the water-ethanol ratio according to the measured hydrogen flow from the
WGS reactor output (Figure 12).
16

Figure 12. Simulated PI control of the hydrogen flow rate.
Next, realisation of the MPC controller is put in Simulink® format utilising MPC
controller block (Figure 13) and tested with several different parameter combinations.
This includes the tuning of the following parameters heuristically in order to achieve
the best control performance. Optimal value for each of the tuned parameter is shown
in parentheses:
• control interval (1),
• prediction horizon (400),
• control horizon (1),
• input rate weight (0.05),
• output weight (1),
• magnitude gain of the input disturbance model (0.001).
WGS-reactor
Gas inH2 partialp
H2 (mol/s) T_reformer
T_in
Step changecurrent
Reformer
W/E-ratioT_inN_totP
Gas out
P_reformer
P
PEM-fuel cell
H2 partialp
H2 (mol/s)
Air
I/U
PEM data
N_in
-C-
N/2F(Hydrogen consumption)
K-
MPC Controller
MPCmv
mo
ref
Air_feed
120
WGS-reactor
Gas inH2 partialp
H2 (mol/s) T_reformer
T_in
Step changecurrent
Reformer
W/E-ratioT_inN_totP
Gas out
P_reformer
P
PEM-fuel cell
H2 partialp
H2 (mol/s)
Air
I/U
PEM data
N_in
-C-
N/2F(Hydrogen consumption)
K-
MPC Controller
MPCmv
mo
ref
Air_feed
120
Figure 13. Simulated MPC for controlling the hydrogen flow rate.
Input and output constraints of the MPC controller are set so that any non-ideal
behaviour of the controller could be observed without restriction by the optimiser
outputsWGS-reactor
gas_inH2 partialpressure
H2 (mol/s) Step change,
I Reformer
W/E-ratio gas_out
PI-controller
difference W/E-ratio
PEM fuel cell
H2 partialpressure
H2 (mol/s)I/U
N/2F(H2 consumption)
K-
17

algorithm. For simulation, the mean value removed in model identification, 0.04
kmol/min, is added for scaling the control model to output absolute values. The
prediction horizon and input disturbance model have the strongest influence on the
control performance.
Both PI and MPC controller are run with the same random seed of the noise source
and the step-type increase of hydrogen consumption from 0.0365 kmol/min to 0.041
kmol/min (a 12% increase) at the time instance of 2500 seconds. The time of the step
change is chosen right after simulations with the both controllers have reached the
steady state. The results are presented in Figure14.
2200 2400 2600 2800 3000 3200 3400 3600 3800 4000
0.036
0.038
0.04
0.042
800 1000 1200 1400 1600 1800 2000 2200 2400 2600
0.036
0.038
0.04
0.042
H2 flow rate,[kmol/min]
PI-controller
MPC
Time, [s]2200 2400 2600 2800 3000 3200 3400 3600 3800 4000
0.036
0.038
0.04
0.042
800 1000 1200 1400 1600 1800 2000 2200 2400 2600
0.036
0.038
0.04
0.042
800 1000 1200 1400 1600 1800 2000 2200 2400 2600
0.036
0.038
0.04
0.042
H2 flow rate,[kmol/min]
PI-controller
MPC
Time, [s] Figure 14. Simulated control results of the MPC and PI controller during a step
change in the required hydrogen flow rate.
PI controller drives the process to the new setpoint approximately in 900 seconds
(settling time) with steady state variation of ±0.0015 kmol/min, i.e. 4%. In
comparison, open loop response varied at the range of ±0.0015 kmol/min during the
steady state process conditions.
On the other hand, MPC controller is capable to settling time of 200 seconds with the
variation range ±0.001 kmol/min of hydrogen output, it means within 2.4% of the
18

setpoint value. The reduction of process variation by applying MPC is thus some
30%.
The rise time of the PI controller was about 300 seconds compared to that of MPC
controller’s 150 seconds, respectively. The results indicate that PI controller has to
react slowly in order to maintain its stability. Still, oscillating behaviour of the
hydrogen signal can be seen in case of PI control. This seems to be due to long delays
exhibiting in the process. According to the simulations, the variation of the hydrogen
flow rate has a fast effect on the fuel cell output in the form of current and voltage
changes.
5.2 Multivariable control and optimisation
5.2.1 Process modelling for optimisation
Process model is needed for the MPC controller and also for cost function calculation
during optimisation. It is identified and tested without the disturbance signal to have
observable conversion values, which else adopt remarkable low signal-to-noise ratio
within the simulations.
Data for model parameter identification is recorded from the simulations where two
manipulated variables are randomly changed in turns. Again, the best results are
achieved by removing the mean values of the model variables and ARX-model
structure with 8 free parameters and 100 second delays performs best in this case.
The fit index for the modelled hydrogen flow rate with training and testing data is
53.4 and for conversion 21.2. The modelling results are presented in Figure 15. The
model underestimates the conversion values, although the bias is almost constant.
However, the direction and magnitude of change provide a feasible estimate for the
prediction and optimisation purposes.
5.2.2 MPC with Differential Evolution optimiser
The optimisation capability of the presented method is tested with simulation run by
introducing a step change to the hydrogen flow rate. Then DE is utilised to calculate
of the new conversion efficiency. This value is further applied to the MPC as a
19

setpoint. The simulation results are presented in Figure 16, where the values of the
hydrogen flow rate and conversion efficiency have been scaled to the same
magnitude.
0 1000 2000 3000 4000 5000-0.015
-0.01
-0.005
0
0.005
0.01
TimeTraining dataTesting data
H2 flow rate,[kmol/min], mean removed
1000 2000 3000 4000 5000-4
-3
-2
-1
0
1
2
3
4x 10-3
TimeTraining dataTesting data
Conversion efficiency,[%], mean removed
0 1000 2000 3000 4000 5000-0.015
-0.01
-0.005
0
0.005
0.01
TimeTraining dataTesting data
H2 flow rate,[kmol/min], mean removed
1000 2000 3000 4000 5000-4
-3
-2
-1
0
1
2
3
4x 10-3
TimeTraining dataTesting data
Conversion efficiency,[%], mean removed
Figure 15. Simulated model outputs of multiple-input multiple-output ARX-model.
Left: hydrogen flow rate, right: conversion efficiency. Solid line: model outputs,
dotted line: simulated true value.
Setpoint for hydrogen flow is changed at 1100 seconds to 4. The new conversion
value is set at time instance 1400 seconds. This results MPC to raise the water-ethanol
ratio that in turn increases the conversion efficiency. At the same time the hydrogen
flow rate is kept within the limits of ±1.25% from the setpoint. The total molar flow
rate remains constant in this case. The optimisation routine results in 2% increase in
the conversion efficiency. However, a spike can be observed due to fast process
dynamics related to conversion calculation in the process model. Temperature and
pressure of the reformer unit were constant during simulation.
The same simulation is also run without the optimiser in Figure 17. The values are
scaled to the same magnitude. The result indicates a slight decrease in the conversion
efficiency after the step change. Also a somewhat higher ethanol flow remains in this
simulation case.
20

1200 1300 1400 1500 1600 1700 18003.4
3.5
3.6
3.7
3.8
3.9
4
4.1
4.2
4.3
Time
Figure 16. Simulated setpoint change in conversion, calculated with DE algorithm.
Solid line: conversion (scaled), dotted line: hydrogen flow rate. Step change to
hydrogen flow at 1100 seconds. New optimised conversion value introduced to MPC
at 1400 seconds.
1200 1300 1400 1500 1600 1700 18003.4
3.5
3.6
3.7
3.8
3.9
4
4.1
4.2
4.3
Time
Figure 17. Simulated setpoint change of hydrogen flow without optimised conversion
efficiency.
21

6 SUMMARY
Simulations with the integrated system consisting of ethanol reformer, WGS reactor
and PEM fuel cell model were performed for process identification and control. For
this, empirical models were developed from the acquired simulation data and utilised
in a model-based control approach.
In this case, an optimal model type among tested candidates for describing the effect
of changes in the water-ethanol ratio to the hydrogen flow rate was argued to have
ARMAX-model structure. With this model, delay dynamics of the process was
captured. It was also indicated during process identification that the dynamics of the
fuel cell system varied within the processing stages. This kind of a stiff system
motivated the application of MPC method.
Model predictive controller outperformed traditional PI controller in the simulations
describing a step change to the setpoint of the hydrogen flow rate, namely a load
disturbance. Also an unmeasured input disturbance was present in the simulations.
This type of process noise was compensated further by identifying a disturbance
model and utilising it in MPC. In this way, the reduction of about 30% in process
variation was achieved in comparison to open loop response. The settling time was
200 seconds compared to that of 900 seconds with the PI controller.
The most critical part of the simulated process chain, namely production of hydrogen
in the reformer was further optimised by studying differential evolution algorithm
connected to MPC. A case example was presented, where the optimisation framework
was applied to maximisation of conversion efficiency in the reformer. In the
simulations, the optimised conversion was 2% higher without violating the required
hydrogen flow rate. The hierarchical control system, where the higher level optimiser
calculated the setpoint to a model predictive controller was indicated to have potential
to reduce the consumption of raw material, namely the ethanol feed to the reactor.
22

The following conclusions based on simulation results can be drawn:
• the reformer and WGS reactor play a major role in fuel cell dynamics, in
comparison to fast dynamics of the PEM fuel cell, suggesting that this is the
critical process part from the control point of view.
• long settling time after load changes is present in the hydrogen flow. This
property limits the applicability of the fuel cell process described in these
simulations.
• It is possible to describe the simulated hydrogen production with empirical
linear models, at least in the tested operating range of the process. It may then
simplify and increase robustness of a model-based control system.
• Differential Evolution optimisation principle connected hierarchically with
MPC has a potential to affect economy of the hydrogen production and at the
same time to the regulation of the flow rate. On the other hand, the needed
control work to achieve the increase in conversion efficiency is small in
comparison to the control effect.
Control simulations and optimisation of the reformer unit were done with the
manipulated variables that most influenced on process outputs. It should be noted that
the results are based on the simulation model that has a limited range for operating
conditions and possibilities to vary other model parameters as described in this paper.
This may have effect on the straight utilisation of the results and conclusions.
23

REFERENCES
Akande A (2005) Production of hydrogen by reforming crude ethanol. Diplomityö,
University of Saskatchewan, Department of Chemical Engineering. 158s.
Alanen R et al. (2003) Energian varastoinnin nykytila. [verkkodokumentti] VTT
tiedotteita 2199 [Viitattu 12.8.2008]. 237s. Saatavissa PDF-tiedostona:
http://www.vtt.fi/inf/pdf/tiedotteet/2003/T2199.pdf
Amphlett J C et al. (1996) A model predicting transient response of proton exchange
membrane fuel cells. Journal of Power Sources, 61(1-2), s.183-188. ISSN 0378-7753.
Basile A, Paturzo L & Galluci F (2003) Co-current and counter-current models for
water gas shift membrane reactor. Catalysis Today, 82, s.275-281. ISSN 0920-5861.
Coderch X L (2005) Literature survey with chemical equilibrium calculations of
bioethanol processing for fuel cells. Diplomityö, Helsinki University of Technology,
Department of Energy Engineering. 72 s.
Corrêa J M et al. (2004) An Electrochemical-based fuel cell model suitable for
electrical engineering automation approach. IEEE Transactions on Industrial
Electronics, 51,(5), s.1103-1112. ISSN 0278-0046.
De Falco M (2011) Ethanol membrane reformer and PEMFC system for automotive
application. Fuel, 90, p.739–747.
Eborn, J., Pedersen, L.M., Haugstetter, C., & Ghosh, S. (2003) System level dynamic
modeling of fuel cell power plants. Proceedings of the 2003 American control
conference. pp. 2024–2029.
Haddad A et al. (2006) Non-linear dynamic modeling of proton exchange membrane
fuel cell. Journal of Power Sources, 163, s.420-432. ISSN 0378-7753
24

http://www.vtt.fi/inf/pdf/tiedotteet/2003/T2199.pdf
Huang J, El-Azzami L & Ho W S W (2005) Modeling of CO2-selective water gas
shift membrane reactor for fuel cell. Journal of Membrane Science, 261, s.67-75.
ISSN 0376-7388.
Huang J, Ho W S W (2008) Effects of system parameters on the performance of CO2-
selective WGS membrane reactor for fuel cells. Journal of Chinese of Chemical
Engineers, 39, s.129-136. ISSN 0368-1653.
Khan M J & Iqbal M T (2005a) Dynamic modelling and simulation of a fuel cell
generatorx. Fuel cells, 05, (1). ISSN 1615-6846.
Khan M J & Iqbal M T (2005b) Modelling and analysis of electrochemical, thermal
and reactant flow dynamics for a PEM fuel cell system. Fuel cells, 05, (4), s.463-475.
ISSN 1615-6846.
Larminie J & Dicks A (2003) Fuel cell systems explained. 2. painos. West Sussex,
England, John Wiley & Sons Ltd, 417 s. ISBN 0-470-84857-X.
Lauzze, K.-C., Chmielewski, D.J. (2006) Power control of a polymer electrolyte
membrane fuel cell, Ind. Eng. Chem. Res. 45 (2006) 4661–4670.
Lemeš Z et al. (2006) Dynamic fuel cell models and their application in hardware in
the loop simulation. Journal of Power Sources, 154, (21),s.386-393. ISSN 0378-7753.
Ma D & Lund C R F (2003) Assessing high-temperature water-gas shift membrane
reactors. Industrial & engineering chemistry research, 42, s. 711-717. ISSN 0888-
5885.
Mann R F et al. (2000) Development and application of a generalized steady-state
electrochemical model for a PEM fuel cell. Journal of Power Sources, 86,s.173-180.
ISSN 0378-7753.
25

Mas V et al. (2008) Ethanol steam reforming using Ni(II)-Al(III) layered double
hydroxide as catalyst precursor kinetic study. Chemical Engineering Journal, 138, (1-
3), s.602-607. ISSN 1385-8947.
Methekar, R.N., Prasad, V. Gudi, R.D. (2007) Dynamic analysis and linear control
strategies for proton exchange membrane fuel cell using a distributed parameter
model, J. Power Sources 165 (2007) 152–170.
Matlab 1 (Viitattu 27.11.2010) http://www.mathworks.com/help/toolbox/mpc/ug/f0-
12091.html
Ni M, Leung D Y C & Leung M K H (2007) A review on reforming bio-ethanol for
hydrogen production. International Journal of Hydrogen Energy, 32, (15), s. 3238-
3247. ISSN 0360-3199.
Ohenoja, M. and Leiviskä, K. (2010)
Ohenoja M & Leiviskä K (2008) Polymeerielektrolyyttimembraanipolttokennojen
dynaaminen malli. Raportti B no 68, Oulu, Oulun yliopisto, Prosessi- ja
ympäristötekniikan osasto.
Ohenoja M (2008) Etanolin reformoinnin mallinnus ja simulointi. Diplomityö, Oulu,
Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, 77 s.
Perna A (2007) Hydrogen from ethanol: Theoretical optimization of a PEMCF system
integrated with a steam reforming processor. International Journal of Hydrogen
Energy, 32, s. 1811-1819. ISSN 0360-3199.
Price KV, Storn RM & Lampinen JA (2005) Differential evolution – a practical
approach to global optimization. Springer-Verlag, Germany. 533 p.
Pukrushpan J et al. (2006) Control-oriented model of fuel processor for hydrogen
generation in fuel cell applications. Control Engineering Practice, 14, s.277-293. ISSN
0967-0661.
26

Qin JS & Badgwell TA (2003) A survey of industrial model predictive control
technology. Control Engineering Practice, 11, p. 733–764.
Shen, C., Gao, G.Y., Zhu, X.J. and Sun, X.J. (2002) Nonlinear modeling and adaptive
fuzzy control of MCFC stack, J. Process Control 12 (2002) 831–839.
Schumacher, J.O. Gemmar, P., Denne, M., Zedda, M., Stueber, M. (2004) Control of
miniature proton exchange membrane fuel cells based on fuzzy logic, J. Power
Sources
129 (2004) 143–151.
Tosti S (2008) COST action 543 Research and Development of Bioethanol Processing
for Fuel Cells, Summer School in Oulu, Finland.
Tosti S et al. (2003) Pd-Ag membrane reactors for water gas shift reaction. Chemical
Engineering Journal, 93, s. 23-30. ISSN 1385-8947.
Uemiya S, Ando N S H & Kikuchi E (1991) The water gas shift reaction assisted by a
palladium membrane reactor. Industrial & engineering chemistry research, 30, s. 585-
589. ISSN 0888-5885.
Ural Z, Gençoğlu M T, Gümüş B (2007) Dynamic simulation of a PEM fuel cell
system. Proceedings 2nd International Hydrogen Energy Congress and Exhibition
IHEC.
Wang C, Nehrir M H, Shaw S R (2005) Dynamic models and model validation for
PEM fuel cells using electrical circuit. Electrical and Engineering Department,
Montana State University. IEEE Transactions on Energy Conversion, 20, (2), s.442-
451. ISSN 0885-8969.
Woo, C.H. and Benziger, J.B. (2007) PEM fuel cell current regulation by fuel feed
control, Chem. Eng. Sci. 62 (2007) 957–968.
27

Wu, W., Pai, C.C. (2009) Control of a heat-integrated proton exchange membrane
fuel cell system with methanol reforming. Journal of Power Sources 194 (2009) 920–
930
Wu, W. Xu, J.P., Hwang, J.J. (2009) Multi-loop nonlinear predictive control scheme
for a simplistic hybrid energy system, Int. J. Hydrogen Energy 34 (2009) 3953–3964.
Zhang, L., Pan, M., Quan, S. (2008) Model predictive control of water management in
PEMFC, J. Power Sources 180 (2008) 322–329.
28

ISBN 978-951-42-9376-4 ISSN 1238-9390 University of Oulu Control Engineering Laboratory – Series A Editor: Leena Yliniemi 28. Mattina V & Yliniemi L, Process control across network, 39 p. October 2005.
ISBN 951-42-7875-5. 29. Ruusunen M, Monitoring of small-scale biomass combustion processes. 28 p.
March 2006. ISBN 951-42-8027-X. ISBN 951-42-8028-8 (pdf). 30. Gebus S, Fournier G, Vittoz C & Ruusunen M, Knowledge extraction for
optimizing monitorability and controllability on a production line. 36 p. March 2006. ISBN 951-42-9390-X
31. Sorsa A & Leiviskä K, State detection in the biological water treatment process. 53 p. November 2006. ISBN 951-42-8273-6
32. Mäyrä O, Ahola T & Leiviskä K, Time delay estimation and variable grouping using genetic algorithms. 22 p. November 2006. ISBN 951-42-8297-3
33. Paavola M, Wireless Technologies in Process Automation - A Review and an Application Example. 46 p. December 2007. ISBN 978-951-42-8705-3
34. Peltokangas R & Sorsa A, Real-coded genetic algorithms and nonlinear parameter identification. 28 p. April 2008. ISBN 978-951-42-8785-5. ISBN 978-951-42-8786-2 (pdf).
35. Rami-Yahyaoui O, Gebus S, Juuso E & Ruusunen M, Failure mode identification through linguistic equations and genetic algorithms. August 2008. ISBN 978-951-42-8849-4, ISBN 978-951-42-8850-0 (pdf).
36. Juuso E, Ahola T & Leiviskä K, Variable selection and grouping. August 2008. ISBN 978-951-42-8851-7. ISBN 978-951-42-8852-4 (pdf).
37. Mäyrä O & Leiviskä K, Modelling in methanol synthesis. December 2008. ISBN 978-951-42-9014-5
38. Ohenoja M, One- and two-dimensional control of paper machine: a literature review. October 2009. ISBN 978-951-42-9316-0
39. Paavola M & Leiviskä K, ESNA – European Sensor Network Architecture. Final Report. 12 p. December 2009. ISBN 978-951-42-6091-9
40. Virtanen V & Leiviskä K, Process Optimization for Hydrogen Production using Methane, Methanol or Ethanol. December 2009. ISBN 978-951-42-6102-2
41. Keskitalo J & Leiviskä K, Mechanistic modelling of pulp and paper mill wastewater treatment plants. January 2010. ISBN 978-951-42-6110-7
42. Kiuttu J, Ruuska J & Yliniemi L, Advanced and sustainable beneficiation of platinum group metals (PGM) in sulphide poor platinum (PGE) deposits – BEGBE. Final Report. May 2010. ISBN 978-951-42-6234-0.
43. Ohenoja M, Isokangas A & Leiviskä K, Simulation studies of paper machine basis weight control. August 2010. ISBN 978-951-42-6271-5.
44. Sorsa A, Koskenniemi A & Leiviskä K, Evolutionary algorithms in nonlinear model identification. September 2010. ISBN 978-951-42-6332-3.
45. Ohenoja M, Application feasibility study of 2D control methods. September 2010. ISBN 978-951-42-6334-7.
46. Ruusunen M, Uusitalo J, Ohenoja M & Leiviskä K, Model Predictive Control and Differential Evolution optimisation of the fuel cell process. January 2011. ISBN 978-951-42-9376-4 (pdf).