Embed Size (px)
Citation preview

Model based friction compensation for an electro-mechanical actuator of a Stewart platform
Maarten Willem van der Kooij Friday, November 4th 2011

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Intro – Moog
• Former Fokker company• Located in Nieuw Vennep• Employees:
• Netherlands 160• Worldwide 10.000
2

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Intro – Stewart Platform
3

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Intro – Stewart Platform
4
• 6 degrees of freedom• Electromechanical vs. hydraulic actuators

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
8 9 10 11 12 13 14-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
Vel
oci
ty [
m/s
]
Time [s]
CommandedMeasured
8 9 10 11 12 13 14-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
Acc
ele
rati
on [
m/s
2]
Time [s]
Intro – Friction
5
• Friction opposes the direction of relative velocity

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Intro – Current method
6
• Simplified model• ‘Moog’ compensation

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Overview
7
Friction Phenomena
Friction Models
Friction Model ID
Measurement Set-up
System Identification
FFWD Compensation
Adjustments
Theory
Identification
Implementation
Conclusions

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Theory – Friction Phenomena
8

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Lund-Grenoble model
• Force equation
• State equation
where
Theory – Friction Models
9

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Theory – Friction Models
DNLRX model
• Presliding model
• Sliding model
10

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Overview
11
Friction Phenomena
Friction Models
Friction Model ID
Measurement Set-up
System Identification
Theory
Identification

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Identification – Measurement Set-up
12

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Equation of Motion
1. System Identification including simple friction model
2. Identify friction in nonlinear region
Identification – System Identification
13

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Identification – Friction Model Identification
14

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
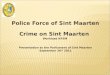
Identification – Check
15
69.2 69.3 69.4 69.5 69.6 69.7 69.8 69.9 70 70.1 70.2-2
0
2
4
6
8
Time [s]
Cur
rent
[A
]
Measured
LuGre modeled
DNLRX modeled
69.2 69.3 69.4 69.5 69.6 69.7 69.8 69.9 70 70.1 70.2-0.2
-0.1
0
0.1
0.2
0.3
Time [s]
Vel
ocity
[m
/s]
69.2 69.3 69.4 69.5 69.6 69.7 69.8 69.9 70 70.1 70.20
0.1
0.2
0.3
0.4
Time [s]
Abs
olut
e cu
rren
t er
ror
[A]
LuGre modeled
DNLRX modeled

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Overview
16
Friction Phenomena
Friction Models
Friction Model ID
Measurement Set-up
System Identification
FFWD Compensation
Adjustments
Theory
Identification
Implementation

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Implementation
17
• Comparison of three situations
• Standard test cycle signal• Sinusoidal signal 0.2 Hz – 20mm amplitude (‘low acceleration’)

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Implementation – Initial Compensation Results
18
4 4.02 4.04 4.06 4.08 4.1 4.12 4.14 4.16 4.18 4.2-2
0
2
4
6x 10
-3
Time [s]
Vel
oci
ty [
m/s
]
Low acceleration test signal
CommandedNo compensationLuGre stdDNLRX std
4 4.02 4.04 4.06 4.08 4.1 4.12 4.14 4.16 4.18 4.2-0.02
0
0.02
0.04
0.06
0.08
Time [s]
Acc
ele
rati
on [
m/s
2]
4 4.02 4.04 4.06 4.08 4.1 4.12 4.14 4.16 4.18 4.2-5
0
5
Time [s]
FF
to
rqu
e [
Nm
-sca
led
]
29.72 29.74 29.76 29.78 29.8 29.82 29.84 29.86 29.88 29.9 29.92-0.05
0
0.05
0.1
0.15
Time [s]
Vel
oci
ty [
m/s
]
Standard reversal bump test signal
29.72 29.74 29.76 29.78 29.8 29.82 29.84 29.86 29.88 29.9 29.920.5
0.55
0.6
0.65
0.7
0.75
Time [s]
Acc
ele
rati
on [
m/s
2]
29.72 29.74 29.76 29.78 29.8 29.82 29.84 29.86 29.88 29.9 29.92-5
0
5
Time [s]
FF
to
rqu
e [
Nm
-sca
led
]

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Implementation – Model Adjustment
LuGre • Reduce compensation when leaving presliding
DNLRX • Reduce number of parameters
19

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Implementation – Results
20

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Implementation – Results: tracking error
21

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Overview
22
Friction Phenomena
Friction Models
Friction Model ID
Measurement Set-up
System Identification
FFWD Compensation
Adjustments
Theory
Identification
Implementation
Conclusions

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Conclusions
• Velocity tracking error reductionby 80% on average for
• Adjusted DNLRX model• Adjusted LuGre model• Initial DNLRX model
by 69% on average for• Initial LuGre model
• The current is predictable with an absolute average error of 0.1 A
• Further work is needed on• Influence of load• Influence of actuator orientation
23

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Questions?
24
?

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Appendix Slides
25

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
LuGre Adjusted
26

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Control of the Actuator / Platform
27

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Position Control
28

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Derivation of the equation of motion
29

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Commanded Velocity Tracking Improvement
30

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
31/…
System Model

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
System Identification Static Model
32

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
DNLRX
Dynamic Non Linear Regression with direct application of eXcitation
Cost function used in optimization
33

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Implementation – ‘Moog’ Algorithm
34
Two tuning methods• Manual• Automatic

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Prediction error
35

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
System Identification
36

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Validation Data Set
37

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Motor Cogging
38

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Motor Cogging
39

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
Acceleration, vel, Tff
40

Model based friction compensation for an electromechanical actuator of a Stewart platform
Theory
Identification
Implementation
Conclusions
• Copper losses• i^2 * R
• Iron losses (magnetic losses)• Hysteresis losses (magnetization of ferromagnetic materials)• Eddy current losses
• Mechanical losses
41
Losses in the motor