Embed Size (px)
Citation preview

5072 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 29, NO. 9, SEPTEMBER 2014
Mode-Adaptive Decentralized Control for RenewableDC Microgrid With Enhanced Reliability and
FlexibilityYunjie Gu, Xin Xiang, Wuhua Li, Member, IEEE, and Xiangning He, Fellow, IEEE
Abstract—A mode-adaptive decentralized control strategy isproposed for the power management of a dc microgrid with multi-ple renewable distributed generators and energy storage systems.In the presented solution, the dc bus voltage signal is used notonly to enable power sharing among different sources, but alsoto designate microgrid operation modes and facilitate seamlessmode transitions. With this mode-adaptive operation mechanism,a greater control freedom can be achieved than the conventionaldc voltage droop control scheme. More importantly, this approachfeatures fully self-disciplined regulation of distributed converterswithout an extra control center or communication link. Therefore,both reliability and flexibility can be enhanced. Meanwhile, a novelmode definition criterion is also provided to highlight the specialcharacteristics of the dc microgrid which is different from an acone. Three typical operation conditions are summarized accordingto which type of sources are dominating the power balance. Finally,the effectiveness of the proposed technique is verified experimen-tally based on a composite dc microgrid test system.
Index Terms—DC microgrid, decentralized control, mode-adaptive.
I. INTRODUCTION
THE microgrid provides a new paradigm for the power gen-eration and delivery, and is taken as a promising building
block for the future smart power system [1]–[3]. In the mi-crogrid, a cluster of distributed generators (DGs) and loads areorganized as an autonomous system with advanced managementstrategies. As a result, it can be designed to accommodate highpenetration of intermittent renewable resources [4], improve en-ergy efficiency [5], [6], provide ancillary services for the bulkpower system [7], and enhance power quality and reliability forlocal consumers [8].
The dc-based power systems driven by power electronic con-verters are envisaged as an enabling technology for the mi-crogrid concept. Compared with the conventional ac structure,
Manuscript received August 1, 2013; revised October 5, 2013; acceptedNovember 29, 2013. Date of current version April 30, 2014. This paper wassupported in part by the National Basic Research Program of China (973 Pro-gram 2014CB247400) and the National Nature Science Foundation of China(51222702). Recommended for publication by Associate Editor Dr. M. Liserre.
The authors are with the College of Electrical Engineering, Zhejiang Univer-sity, Hangzhou 310027, China (e-mail: [email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TPEL.2013.2294204
the dc-based solution can achieve higher efficiency by elimi-nating the extra ac/dc and dc/ac conversion stages, since manyrenewable DGs, energy storage systems (ESSs), and an increas-ing number of loads directly utilize dc power [9]. Additionally,the dc system offers greater controllability, because it does notsuffer from synchronization and reactive power compensationproblems which are intrinsic to the ac grid [10]–[12]. Further-more, the dc microgrid can be fully decoupled from the utilitygrid by an interface converter, enabling the seamless transi-tion between the grid-connected and islanded operation modes.Because of the aforementioned factors, the dc microgrid is re-ceiving increased attention recently, especially for small-scalecommercial and residential applications [13].
An intelligent control and management system is one of thecrucial points for the microgrid operation. The target of such asystem is coordinating the distributed microgrid terminals, e.g.,the DGs, ESSs, and smart loads, in order to mitigate the powerintermittency and uncertainty, and provide a stable, reliable, andeconomic power supply for both local customers and the utility.A series of control strategies has been published for ac micro-grids, leading to a standardized hierarchical power managementframework [14]–[19]. However, these methods cannot be fullymigrated into dc microgrids because of the aforementioned spe-cial features of the dc system.
As with their ac counterparts, the control strategies for dcmicrogrids can also be categorized into two classes, namelythe centralized and decentralized control structure. For the cen-tralized scheme, all the microgrid terminals are regulated byan energy control center (ECC) through communication. Anexample is presented in [20] of a data center microgrid with so-phisticated operation modes and controllable mode transitions.However, the centralized regulation relies heavily upon the ECCitself, resulting in inadequate system reliability and scalability.Therefore, this configuration is not suitable for an expandablemicrogrid with an open boundary and a large number of termi-nals [21].
To solve this problem, the decentralized control structure isproposed in which the distributed terminals make independentcontrol decisions based on the local information [22]. Volt-age/current (V/I) or voltage/power (V/P) droop control schemesare the classical decentralized power management methods usedon dc microgrids [22], [23]. In such schemes, the deviation ofthe dc bus voltage is used for autonomous power sharing amongdifferent sources [24]. Despite improved reliability, the flexi-bility of the droop control scheme is limited because all theterminals in the system behave rigidly according to the preset
0885-8993 © 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications standards/publications/rights/index.html for more information.

GU et al.: MODE-ADAPTIVE DECENTRALIZED CONTROL FOR RENEWABLE DC MICROGRID 5073
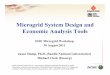
Fig. 1. Composite dc microgrid system layout.
droop curves without a flexible mode transition mechanism toreact to changing conditions [25].
In this paper, a mode-adaptive decentralized control schemeis introduced as an improvement of the classical droop method.In the presented technique, the droop curves of different typesof terminals are arranged at separated voltage ranges, so that thedc bus voltage can be used to designate operation modes andfacilitate adaptive mode transitions. This approach features fullyself-disciplined operation of each terminal without ECC or extracommunication. Therefore, both the reliability and flexibilitycan be enhanced. Furthermore, detailed implementation of theproposed concept is demonstrated based on a composite dcmicrogrid test system, which consists of PV and wind powerDGs, Li-ion battery ESSs, local loads, and an interfacing dc–acconverter connected to the utility grid, as shown in Fig. 1.
This paper is organized as follows. A general model for theconverters adopted in the dc microgrid is described in Section IIto lay the basis for system-level control. The principle ofthe mode-adaptive decentralized control strategy is explainedSection III. The detailed controller implementation is presentedin Sections IV. The experimental results of the steady-state op-eration and transient-state mode transitions are displayed inSection V. The main contributions of this paper are summarizedin the last section.
II. SYSTEM-LEVEL REPRESENTATION OF CONVERTERS
The coordinated operation of the dc microgrid is dependent onthe power regulation capability of the converters in the system,including boost-type dc/dc converters for PV panels, bidirec-tional dc/dc converters for ESS components, ac/dc convertersfor wind turbine generators, and dc/ac converters for utilityinterfacing [26]–[29]. These various types of converters havedifferent working principles and control strategies. Therefore, ageneral description of the individual converters should be ob-tained before defining the power sharing and mode transitionmechanism of the entire microgrid system.
Fortunately, the diversified converter topologies and work-ing patterns can be independently handled by the local con-troller embedded in the converter itself. As a result, a simplifiedsystem-level converter model can be obtained which focuses onthe external behavior rather than the internal details. Since mostconverters can have current regulating loops or are inherentlycurrent source converters, they can be represented as a control-lable current source, with the small-signal dynamics describedby a transfer function Gconv (s), as shown in Fig. 2 [25].
Fig. 2. Equivalent model for current regulated converters.
Fig. 3. Terminal regulating unit and the equivalent model.
Fig. 4. Bus regulating unit and the equivalent model.
Despite this unified representation, the converters in the dcmicrogrid have dual control targets, that is, to regulate the powerflow of the local terminal or to maintain the voltage stability ofthe microgrid system. Since the two operation goals may bein conflict, each converter can only choose one of them at aparticular time. Therefore, according to the individual controlobjectives, the converter units can be further categorized intotwo classes, namely the terminal regulating unit and the busregulating unit.
A. Terminal Regulating Unit
The goal of the terminal regulating unit is to satisfy the powerdemand or deliver the power production of the local terminal.Such converter units make decisions only based on the terminalcondition, and do not take part in sustaining the power balanceof the microgrid system. The noncontrollable loads and therenewable DGs working with maximum power point tracking(MPPT) are typical examples of terminal regulating units. Forthese units, the converter act as a power adapter, so the powerconsumption or production does not vary with the dc voltagelevel. That is to say, the terminal regulating unit serves as aconstant power load/source in the microgrid system, as shownin Fig. 3 [30].
B. Bus Regulating Unit
Unlike the self-serving terminal regulating unit, the bus reg-ulating unit takes charge of maintaining the power balance andvoltage stability of the entire microgrid system. Such units ac-tively regulate the bus voltage by adjusting the current injectioninto the microgrid based on the dc voltage feedback signal.Therefore, they can be described as a voltage source in serieswith the equivalent impedance Zeq , as depicted in Fig. 4.
The bus regulating unit is the cornerstone for supporting thedc microgrid stability. A high proportion of the bus regulatingunits in the microgrid system may improve dc voltage stabil-ity by providing stronger compensation reaction in respond to

5074 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 29, NO. 9, SEPTEMBER 2014
power variations. From this point of view, an important functionof the decentralized microgrid control scheme is to adaptivelyassign the bus regulation duty to different terminals accordingto real-time conditions, in order to optimize power flow andguarantee stable and reliable operation. This is discussed in thenext section.
III. MODE-ADAPTIVE DECENTRALIZED CONTROL STRATEGY
To enhance flexibility of the dc microgrid, the control target ofeach terminal needs to be adjusted actively in real time. In otherwords, each converter unit should be capable to switch adap-tively between the terminal regulating state and bus regulatingstate according to system conditions.
The mode-adaptive decentralized control strategy introducedin this section utilizes the dc bus voltage itself to designatedifferent microgrid modes and facilitate self-disciplined controltarget switching and power sharing. As a result, both reliabilityand flexibility can be improved for the microgrid system. Thecomprehensive mode definition criterion and seamless modetransition mechanism are described in the following.
A. DC Microgrid Operation-Mode Definition
For a conventional ac microgrid, it is a common practiceto discriminate between the grid-connected mode and the is-landed mode, because different operation principles and controlstrategies are involved in each condition. For the dc microgrid,however, this mode classification is not suitable, because the dcbus is decoupled from the utility grid by the dc–ac interface con-verter. As a result, the events on the main grid may not directlyaffect the microgrid operation.
Moreover, utility constraints have to be accounted for as well,especially when microgrid penetration into the power systembecomes significant. It is desired that the microgrid should beable to provide power support and ancillary service to the maingrid, as required by the power system operator [31]. From thispoint of view, it is not feasible to treat the utility as a “superterminal” with infinite power capacities. The utility interfaceterminal also requires attentive regulation to deal with its powerand energy limitations, just like the DG and ESS.
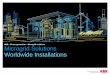
Because of these considerations, a novel mode definition cri-terion is proposed in this paper. Generally, there are three possi-ble source types in the microgrid system, namely the DG, ESS,and the utility; all with bus regulation capability. Consideringthat there should be at least one bus regulating unit in the mi-crogrid to maintain dc voltage stability, three distinct operationmodes can be defined according to which type of terminal takesbus regulation responsibility, as shown in Fig. 5.
When the DG power generation and ESS reserve are notadequate to meet the demand of the local loads, the deficitcan only be compensated by importing from the utility. In thissituation, the utility interface converter should maintain powerbalance within the microgrid and serve as the bus regulatingunit. This mode is highlighted by Fig. 5(a), and named as theutility-dominating mode in this paper to accentuate this feature.
Similarly, when there is sufficient power and energy re-serve within the ESS, the ESS terminals assume bus regulation
Fig. 5. Definition of operation modes for the proposed system: (a)Utility-dominating mode. (b) Storage-dominating mode. (c) Generation-dominatingmode.
responsibility, whereas the utility interface converter regulatesthe power exchange with the main grid according to the powersystem operator configuration. Meanwhile, the renewable DGsoperate in the MPPT mode to maximize the energy harvest. Thismode is termed the storage-dominating mode and demonstratedin Fig. 5(b).
If the power generation from the DGs is higher than the localconsumption and the power surplus exceeds the capacity of both

GU et al.: MODE-ADAPTIVE DECENTRALIZED CONTROL FOR RENEWABLE DC MICROGRID 5075
Fig. 6. Adaptive mode transitions based on voltage deviation: (a) Voltagerange definition. (b) Mode transition mechanism.
the ESS and utility grid, then the DG terminals should changeinto bus regulating units. In this situation, the DG convertersexit the MPPT mode and start to actively limit power generationto maintain power balance. This mode is called the generation-dominating mode, as shown in Fig. 5(c).
The advantage of such a mode classification method is toestablish a clear relationship between the operation modes andthe power balance conditions. More importantly, it also enablesmode designation and seamless transition according to the dcbus voltage deviation, as explained in the following.
B. Adaptive Mode Transition Mechanism
One important feature for the dc microgrid is that the systempower balance condition is indicated by the dc bus voltage. Forexample, the power surplus may result in the charging of thebus capacitors, hence the rise of bus voltage, and vice versa.Therefore, the dc bus voltage itself can be used to indicatethe operation mode and enable adaptive and seamless modetransitions. Based on this idea, the operation range of the busvoltage is divided into three separated regions, each of whichcorresponds to a particular operation mode, as shown in Fig. 6.The DG, ESS, and utility interface converters make autonomousdecisions based only on the dc bus voltage to switch betweenthe bus regulating and terminal regulating states adaptively.
For example, if the microgrid operates in the storage-dominating mode and runs out of power and/or energy reservesbecause of the rise of local loads, power interruption of DGs,or for any other reasons which may cause a power deficiency,the dc voltage will decrease due to the power deficit. When thevoltage sag detected by the utility interface converter reachesthe lower threshold Vlow , it autonomously changes into a bus
TABLE ISUMMARY OF EACH MODE AND ITS CHARACTERISTIC
Fig. 7. Improved mode-adaptive droop curve.
regulating unit to prevent further voltage collapse. As a result,the microgrid shifts into the utility-dominating mode.
Conversely, if the local generation recovers during the utility-dominating mode, the bus voltage rises until the ESS units attainbus regulation responsibility. In this way, the microgrid switchesback to the storage-dominating mode.
Similar mode-switching events occur between the storage-dominating mode and the generation-dominating mode. Thedetailed target and characteristic of each operation mode andpossible mode-switching patterns are summarized in Fig. 6 andTable I.
The variables appearing in Fig. 6 and Table I are defined asfollows:
PDG DG power generation available in the MPPT state;Pac rated power output from the microgrid to the ac utility
grid, which can be determined by the power system operator;during a blackout, the value is zero;
Pload local load power consumption;PESS ch , PESS dsc ESS units maximum charging and dis-
charging power, these values are dependent on ESS state ofcharge, e.g., if fully discharged, PESS dsc= 0;
Vbus DC bus voltage;Vhigh , Vlow threshold voltages for the three operation modes.
IV. DETAILED CONTROLLER IMPLEMENTATION
The previously mentioned mode designation and transitionmechanisms can be implemented by an appropriate modificationof the conventional droop method, as shown in Fig. 7 [32]. In theimproved approach, the voltage–power (V–P) characteristic foreach terminal is divided into two sections. The drooped sectioncorresponds to the bus regulating state, while the constant powersection represents the terminal regulating state. The V–P curves

5076 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 29, NO. 9, SEPTEMBER 2014
Fig. 8. Control algorithm for the mode-adaptive droop curve.
Fig. 9. Relationship between the control parameter and V–P curve.
of different terminals are configured at the respective voltageranges according to the mode definition. With this arrangement,a particular group of converters can automatically switch to thebus regulation state and maintain the power balance activelywhen the bus voltage falls into the corresponding range. Sincethe proposed solution is an extension of the conventional droopcontrol scheme, it inherits the advantage of autonomous powersharing among multiple units. To ensure consistency, the modetransition voltage threshold Vhigh and Vlow should be identicalthroughout the microgrid. Meanwhile, the slop of each droopcurve should be in reverse proportion to the power rating, sothat different bus regulation units pick up the amount of powercorresponding to their power capacity.
The detailed control algorithm to realize this V–P relationshipis presented in Fig. 8. The shape and position of the V–P curve isdetermined by four parameters, namely the droop rate Rdroop ,voltage reference Vref , and power constraints Pmax and Pmin .Taking the ESS unit as an example, the physical meaning of theseparameters is depicted in Fig. 9. Vref should be set in accordancewith the voltage range of the corresponding microgrid mode,while Rdroop is inversely proportional to the converter powerrating to enable appropriate power sharing. The value of Pmaxand Pmin is determined by the power and energy limitation. Fora DG unit, Pmax comes from the MPPT algorithm, while Pminequals zero. For a utility interface unit, Pmax and Pmin are setby power system operator dispatching.
The transfer function Gconv(s) represents the converter’s cur-rent response dynamics, as described in Section II. Gconv(s)may have diversified forms for different converter types andcurrent regulating methods. Fortunately, thanks to the fast con-verter switching action and the evolution of control technolo-gies, Gconv(s) generally has a low-pass characteristic with ahigh bandwidth. As a result, it may not affect the performanceof the droop control loop because their bandwidth is decoupled.
For example, for a three-phase voltage source inverterwith direct power control, Gconv(s) can be simplified as
Fig. 10. Composite renewable dc microgrid test system.
Fig. 11. Tested dc microgrid system layout.
follows [33], [34]:
Gconv(s) =1
τs + 1(1)
in which the time constant τ is on the scale of a switchingcycle. If the bandwidth of the droop control loop is designed tobe much less than the switching frequency, the delay effect ofGconv(s) is negligible.
V. EXPERIMENTAL VERIFICATION
In this section, a composite dc microgrid laboratory test plat-form is established to demonstrate the performance of the mode-adaptive decentralized control strategy. A picture of the testedmicrogrid is displayed in Fig. 10. The detailed system layoutand terminal configuration is shown in Fig. 11 and Table II.
To be compatible with the conventional 380-V three-phaseac distribution system in some countries, the dc bus voltage ofthe tested system is set to be between 600 and 750 V. The cor-responding voltage of each operation mode is evenly allocatedwithin this range, as listed in Table III.
Three typical scenarios are emulated to exhibit the reliableand flexible functions of the presented mode-adaptive controlstrategy under various circumstances. In order to unify the re-sults, a per-unit system is used in describing all the quantities,with the base values set to the corresponding normal values. Forthe dc bus voltage, the normal value is considered as 600 V.

GU et al.: MODE-ADAPTIVE DECENTRALIZED CONTROL FOR RENEWABLE DC MICROGRID 5077
TABLE IILIST OF TERMINALS IN THE PRESENTED MICROGRID
TABLE IIIVOLTAGE RANGE DEFINITION FOR EACH OPERATION MODE
A. Storage to Generation-Dominating Mode Transition Test
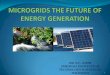
In this case, the microgrid initially operates in the storage-dominating mode, then a wing gust results in the significantincrease in the wind power output which exceeds the powercapability of the energy storage and utility interface units in thesystem.
The experimental results are given in Fig. 12. The wind powerconverter operates in the MPPT mode until the ESS unit reachesthe power saturation point, as shown in Fig. 12(a). Consequently,the bus voltage rises above the mode transition threshold, soall the DG units, including the wind power converter, switch intothe bus regulating state to actively limit the power generation, tomaintain power balance. Eventually, the dc bus voltage stabilizesat a new operating point in the generation-dominating mode, asdisplayed in Fig. 12 (b).
When the wind gust ceases, the DG power declines, and themicrogrid reverts to the storage-dominating mode, as displayedin Fig. 13.
B. Voltage Stability and the Power Sharing Test
This test aims at verifying the voltage stability and powersharing performance of the proposed control scheme. In thestorage-dominating mode, an oscillating current is injected by aPV converter into the dc bus to emulate DG power fluctuations.The bus voltage and output power of each ESS converter ismonitored and displayed in Fig. 14.
The bus voltage ripple is less than 5% under 50% PV powervariation, because power surplus or deficit is compensated byESS units. Static and dynamic power sharing accuracy of thetwo ESS converters is ensured with the mode-adaptive droop
Fig. 12. Switching to generation-dominating mode during wind gust: (a)Speed-power trajectory. (b) Voltage and power during mode transition.
control technique. Meanwhile, the utility interface unit feedsa smooth power into the grid according to the power systemoperator regulation. As a result, the DG power uncertainty ismitigated through coordination within the microgrid itself.
C. Storage to Utility-Dominating Mode Transition Test
In the third test, all the DGs are shutdown at a particulartime to emulate adverse meteorological conditions for renew-able power generation. As a result, the microgrid shifts into theutility-dominating mode as shown in Fig. 15(a). In the dynamicprocess following a step change of PPV , Pbat takes action firstto keep the microgrid in the storage-dominating mode, until itreaches its power limitation. After that, vbus further decreasesdue to bus capacitor discharging. When vbus reaches the modetransition threshold Vlow , Pgrid starts to increase and the mi-crogrid shifts to the utility-dominating mode. Finally, vbus isstabilized at a new balance point after a short adjustment. Sim-ilar processes can be observed in the reverse transition back tothe storage-dominating mode displayed in Fig. 15(b).
If the utility interface converter is not capable of support-ing the load on itself, the bus voltage will further droop. Then,

5078 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 29, NO. 9, SEPTEMBER 2014
Fig. 13. Returning to the storage-dominating mode: (a) Speed-power trajec-tory. (b) Voltage and power during mode transition.
the controllable load can be disconnected from the microgridsuccessively according to their priorities to maintain the powerbalance [35]. Load management can form another operationmode in the mode-adaptive control strategy, but is not yet cov-ered in this paper.
VI. CONCLUSION
The mode-adaptive decentralized dc microgrid control strat-egy presented in this paper takes advantage of the dc voltageitself to facilitate flexible mode definition, seamless mode tran-sition, and reliable power sharing. This solution is based on thefully decentralized operation of the distributed converters with-out an additional communication link. As a result, both the mi-crogrid reliability and flexibility can be enhanced. Meanwhile, anovel mode definition criterion is also proposed to highlight thefeature of the dc microgrid from the power management point ofview. Three typical working conditions are summarized, namelythe generation-dominating mode, storage-dominating mode andutility-dominating mode. Detailed implementation based on thelaboratory dc microgrid test system verifies the performance ofthe proposed strategy.
Fig. 14. Fluctuation compensation and power sharing among ESS units: (a)Power fluctuation and ESS power sharing. (b) Bus voltage and utility power.
Fig. 15. Switching between utility- and storage-dominating modes: (a)Switching to utility-dominating mode. (b) Recovering from DG outage.

GU et al.: MODE-ADAPTIVE DECENTRALIZED CONTROL FOR RENEWABLE DC MICROGRID 5079
REFERENCES
[1] R. H. Lasseter, “MicroGrids,” in Proc. IEEE Power Eng. Soc. WinterMeet., 2002, pp. 305–308.
[2] R. H. Lasseter, “Smart distribution: Coupled microgrids,” Proc. IEEE,vol. 99, no. 6, pp. 1074–1082, Jun. 2011.
[3] D. Boroyevich, I. Cvetkovic, D. Dong, R. Burgos, W. Fei, and F. Lee,“Future electronic power distribution systems—A contemplative view,”in Proc. 12th Int. Conf. Optim. Electr. Electron. Equip., 2010, pp. 1369–1380.
[4] J. Mitra and M. R. Vallem, “Determination of storage required to meet reli-ability guarantees on island-capable microgrids with intermittent sources,”IEEE Trans. Power Syst., vol. 27, no. 4, pp. 2360–2367, Nov. 2012.
[5] N. Hatziargyriou, H. Asano, R. Iravani, and C. Marnay, “MicroGrids,”IEEE Power Energy Mag., vol. 5, no. 4, pp. 78–94, Jul./Aug. 2007.
[6] T. L. Vandoorn, J. D. M. De Kooning, B. Meersman, J. M. Guerrero, andL. Vandevelde, “Automatic power-sharing modification of P/V droop con-trollers in low-voltage resistive microgrids,” IEEE Trans. Power Del.,vol. 27, no. 4, pp. 2318–2325, Oct. 2012.
[7] S. Beer, T. Gomez, D. Dallinger, I. Momber, C. Marnay, M. Stadler, andJ. Lai, “An economic analysis of used electric vehicle batteries integratedinto commercial building microgrids,” IEEE Trans. Smart Grid, vol. 3,no. 1, pp. 517–525, Mar. 2012.
[8] G. Venkataramanan and C. Marnay, “A larger role for microgrids,” IEEEPower Energy Mag., vol. 6, no. 3, pp. 78–82, May/Jun. 2008.
[9] H. Kakigano, M. Nomura, and T. Ise, “Loss evaluation of DC distributionfor residential houses compared with AC system,” in Proc. Int. PowerElectron. Conf., 2010, pp. 480–486.
[10] F. Blaabjerg, R. Teodorescu, M. Liserre, and A. V. Timbus, “Overviewof control and grid synchronization for distributed power generation sys-tems,” IEEE Trans. Ind. Electron., vol. 53, no. 5, pp. 1398–1409, Oct.2006.
[11] J. Rocabert, A. Luna, F. Blaabjerg, X. Rodri, and P. Guez, “Control ofpower converters in AC microgrids,” IEEE Trans. Power Electron., vol. 27,no. 11, pp. 4734–4749, Nov. 2012.
[12] J. He, Y. W. Li, and M. S. Munir, “A flexible harmonic control approachthrough voltage-controlled DG-grid interfacing converters,” IEEE Trans.Ind. Electron., vol. 59, no. 1, pp. 444–455, Jan. 2012.
[13] H. Kakigano, Y. Miura, and T. Ise, “Low-voltage bipolar-type DC micro-grid for super high quality distribution,” IEEE Trans. Power Electron.,vol. 25, no. 12, pp. 3066–3075, Dec. 2010.
[14] J. M. Guerrero, J. C. Vasquez, J. Matas, L. G. de Vicuna, and M. Castilla,“Hierarchical control of droop-controlled AC and DC microgrids—A gen-eral approach toward standardization,” IEEE Trans. Ind. Electron., vol. 58,no. 1, pp. 158–172, Jan. 2011.
[15] J. M. Guerrero, M. Chandorkar, T. Lee, and P. C. Loh, “Advanced controlarchitectures for intelligent microgrids—Part I: Decentralized and hierar-chical control,” IEEE Trans. Ind. Electron., vol. 60, no. 4, pp. 1254–1262,Apr. 2013.
[16] J. M. Guerrero, L. C. Poh, L. Tzung-Lin, and M. Chandorkar, “Advancedcontrol architectures for intelligent microgrids—Part II: Power quality, en-ergy storage, and AC/DC microgrids,” IEEE Trans. Ind. Electron., vol. 60,no. 4, pp. 1263–1270, Apr. 2013.
[17] K. Jaehong, J. M. Guerrero, P. Rodriguez, R. Teodorescu, andN. Kwanghee, “Mode adaptive droop control with virtual outputimpedances for an inverter-based flexible AC microgrid,” IEEE Trans.Power Electron., vol. 26, no. 3, pp. 689–701, Mar. 2011.
[18] E. Barklund, N. Pogaku, M. Prodanovic, C. Hernandez-Aramburo,and T. C. Green, “Energy management in autonomous microgrid usingstability-constrained droop control of inverters,” IEEE Trans. Power Elec-tron., vol. 23, no. 5, pp. 2346–2352, Sep. 2008.
[19] N. Pogaku, M. Prodanovic, and T. C. Green, “Modeling, analysis andtesting of autonomous operation of an inverter-based microgrid,” IEEETrans. Power Electron., vol. 22, no. 2, pp. 613–625, Mar. 2007.
[20] D. Salomonsson, L. Soder, and A. Sannino, “An adaptive control systemfor a DC microgrid for data centers,” IEEE Trans. Ind. Appl., vol. 44,no. 6, pp. 1910–1917, Nov./Dec. 2008.
[21] D. Chen and L. Xu, “Autonomous DC voltage control of a DC microgridwith multiple slack terminals,” IEEE Trans. Power Syst., vol. 27, no. 4,pp. 1897–1905, Nov. 2012.
[22] Y. Ito, Z. Yang, and H. Akagi, “DC microgrid based distribution powergeneration system,” in Proc. 4th Int. Power Electron. Motion ControlConf. , 2004, pp. 1740–1745.
[23] W. Tang and R. H. Lasseter, “An LVDC industrial power distributionsystem without central control unit,” in Proc. IEEE 31st Annu. PowerElectron. Spec. Conf., 2000, pp. 979–984.
[24] L. Xu and D. Chen, “Control and operation of a DC microgrid with variablegeneration and energy storage,” IEEE Trans. Power Del., vol. 26, no. 4,pp. 2513–2522, Oct. 2011.
[25] M. Rodriguez, G. Stahl, L. Corradini, and D. Maksimovic, “Smart DCpower management system based on software-configurable power mod-ules,” IEEE Trans. Power Electron., vol. 28, no. 4, pp. 1571–1586, Apr.2013.
[26] R. W. Erickson and D. Maksimovic, Fundamentals of power electronics,2nd ed. Norwell, MA, USA: Kluwer, 2001.
[27] Y. Zhao, W. Li, Y. Deng, and X. He, “Analysis, design, and experimen-tation of an isolated ZVT boost converter with coupled inductors,” IEEETrans. Power Electron., vol. 26, no. 2, pp. 541–550, Feb. 2011.
[28] S. Inoue and H. Akagi, “A bidirectional DC-DC converter for an energystorage system with galvanic isolation,” IEEE Trans. Power Electron.,vol. 22, no. 2, pp. 2299–2306, Nov. 2007.
[29] Y. Gu, W. Li, Y. Zhao, B. Yang, C. Li, and X. He, “Transformerless inverterwith virtual DC bus concept for cost-effective grid-connected PV powersystems,” IEEE Trans. Power Electron., vol. 28, no. 2, pp. 793–805, Feb.2013.
[30] A. Kwasinski and C. N. Onwuchekwa, “Dynamic behavior and stabiliza-tion of DC microgrids with instantaneous constant-power loads,” IEEETrans. Power Electron., vol. 26, no. 3, pp. 822–834, Mar. 2011.
[31] A. L. Dimeas and N. D. Hatziargyriou, “Operation of a multiagent systemfor microgrid control,” IEEE Trans. Power Syst., vol. 20, no. 3, pp. 1447–1455, Aug. 2005.
[32] J. Schonberger, R. Duke, and S. D. Round, “DC-Bus signaling: A dis-tributed control strategy for a hybrid renewable nanogrid,” IEEE Trans.Ind. Electron., vol. 53, no. 5, pp. 1453–1460, Oct. 2006.
[33] D. Chen, L. Xu, and L. Yao, “DC network stability and dynamic analysisusing virtual impedance method,” in Proc. 38th Annu. Conf. IEEE Ind.Electron. Soc., 2012, pp. 5625–5630.
[34] D. Zhi, L. Xu, and B. W. Williams, “Improved direct power control ofgrid-connected DC/AC converters,” IEEE Trans. Power Electron., vol. 24,no. 5, pp. 1280–1292, May 2009.
[35] D. Chen, L. Xu, and L. Yao, “DC voltage variation based autonomouscontrol of DC microgrids,” IEEE Trans. Power Del., vol. 28, no. 2, pp. 637–648, Apr. 2013.
Yunjie Gu was born in Hebei, China, in 1987. He re-ceived the B.Sc. degree from the Department of Elec-trical Engineering, Zhejiang University, Hangzhou,China, in 2010, where he is currently working towardthe Ph.D. degree in electrical engineering.
From May 2011 to January 2012, he was aResearch Intern at GE Global Research Center,Shanghai, China. From July to September 2013, hewas a Student Visitor at Newcastle University, New-castle upon Tyne, U.K. His research interests includecontrol and networking of power conversion systems.
Xin Xiang was born in Hunan, China, in 1990. Hereceived the B.Sc. degree from the School of Infor-mation and Electrical Engineering from the HarbinInstitute of Technology, China, in 2011, and is cur-rently working toward the M.Sc. degree in the Col-lege of Electrical Engineering, Zhejiang University,Hangzhou, China.
His research interests include dc/dc converters andthe photovoltaic power system.

5080 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 29, NO. 9, SEPTEMBER 2014
Wuhua Li (M’09) received the B.Sc. and Ph.D. de-grees in applied power electronics and electrical engi-neering from Zhejiang University, Hangzhou, China,in 2002 and 2008, respectively.
From September 2004 to March 2005, he was aResearch Intern, and from January 2007 to June 2008,a Research Assistant in GE Global Research Center,Shanghai, China. From July 2008 to April 2010, hewas a Postdoctoral Fellow at the College of Electri-cal Engineering, Zhejiang University. In May 2010,he became a Faculty Member at Zhejiang University
as a Lecturer. In December 2010, he was promoted as an Associate Professor.From July 2010 to September 2011, he was a Postdoctoral Fellow at the De-partment of Electrical and Computer Engineering, Ryerson University, Toronto,ON, Canada. His research interests include high-efficiency power converters andrenewable energy power conversion system. He has published more than 100peer-reviewed technical papers and holds more than 30 issued/pending patents.
Dr. Li received the 2011 Top Ten Excellent Young Staff Award and the2012 Distinguished Young Scholar from Zhejiang University, the 2012 Out-standing Young Researcher Award from Zhejiang Province and the 2012 DeltaYoung Scholar from Delta Environmental & Educational Foundation due to hisexcellent teaching and research contributions. He received three Scientific andTechnological Achievements Awards from Zhejiang Provincial Government andthe State Educational Ministry of China in 2009 and 2011, respectively.
Xiangning He (M’95–SM’96–F’10) received theB.Sc. and M.Sc. degrees from the Nanjing Universityof Aeronautical and Astronautical, Nanjing, China,in 1982 and 1985, respectively, and the Ph.D. degreefrom Zhejiang University, Hangzhou, China, in 1989.
From 1985 to 1986, he was an Assistant Engineerat the 608 Institute of Aeronautical Industrial GeneralCompany, Zhuzhou, China. From 1989 to 1991, hewas a Lecturer at Zhejiang University. In 1991, he ob-tained a Fellowship from the Royal Society of U.K.,and conducted research in the Department of Com-
puting and Electrical Engineering, Heriot-Watt University, Edinburgh, U.K., asa Postdoctoral Research Fellow for two years. In 1994, he joined Zhejiang Uni-versity as an Associate Professor. Since 1996, he has been a Full Professor in theCollege of Electrical Engineering, Zhejiang University. He was the Director ofthe Power Electronics Research Institute and the Head of the Department of Ap-plied Electronics, and he is currently the Vice Dean of the College of ElectricalEngineering, Zhejiang University. His research interests are power electronicsand their industrial applications. He is the author or coauthor of more than 280papers and one book “Theory and Applications of Multi-level Converters.” Heholds 22 patents.
Dr. He received the 1989 Excellent Ph.D. Graduate Award, the 1995 ElitePrize Excellence Award, the 1996 Outstanding Young Staff Member Awardand 2006 Excellent Staff Award from Zhejiang University for his teaching andresearch contributions. He received seven Scientific and Technological Achieve-ments Awards from Zhejiang Provincial Government and the State EducationalMinistry of China in 1998, 2002, 2009 and 2011 respectively, and six ExcellentPaper Awards. He is a Fellow of the IEEE and has been appointed as the IEEEDistinguished Lecturer by the IEEE Power Electronics Society, in 2011. He isalso a Fellow of the Institution of Engineering and Technology (formerly IEE),U.K.