Embed Size (px)
Citation preview
laboratory
Gerstner
Uvod do mobilnı robotiky
Mobilnı robotika
Uvod do mobilnı robotiky
RNDr. Petr Stepan, [email protected]
Skupina mobilnı robotiky
Gerstnerova laborator
katedra Kybernetiky
Ceske vysoke ucenı technicke v Praze
Uvod do mobilnı robotiky 21. zarı 2010
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Obsah
1 Uvod do mobilnı robotikyOrganizace vyukyCo je mobilnı robotikaAplikace mobilnı robotikySouteze
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Organizace vyuky
Vyucujıcı
RNDr. Miroslav Kulich, Ph.D.
ing. Libor Preucil, CSc.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Definice mobilnıho robotu
Mobilnı robot je takovy robot, ktery je sam schopen se premıstit vprostoru.Z hlediska autonomnosti lze roboty rozdelit na:
teleoperovane - rızene clovekem plne na dalku, clovek prımoovlada veskere vystupy robotu
semi-teleoperovane - clovek zadava castecne cıle, robotautonomne vykonava pouze nektere rıdicı cinnosti
autonomnı - robotu je prirazen cıl (bud’ clovekem, nebopocıtacovym systemem) a robot tento cıl autonomne plnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Definice mobilnıho robotu
Mobilnı robot je takovy robot, ktery je sam schopen se premıstit vprostoru.Z hlediska autonomnosti lze roboty rozdelit na:
teleoperovane - rızene clovekem plne na dalku, clovek prımoovlada veskere vystupy robotu
semi-teleoperovane - clovek zadava castecne cıle, robotautonomne vykonava pouze nektere rıdicı cinnosti
autonomnı - robotu je prirazen cıl (bud’ clovekem, nebopocıtacovym systemem) a robot tento cıl autonomne plnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Definice mobilnıho robotu
Mobilnı robot je takovy robot, ktery je sam schopen se premıstit vprostoru.Z hlediska autonomnosti lze roboty rozdelit na:
teleoperovane - rızene clovekem plne na dalku, clovek prımoovlada veskere vystupy robotu
semi-teleoperovane - clovek zadava castecne cıle, robotautonomne vykonava pouze nektere rıdicı cinnosti
autonomnı - robotu je prirazen cıl (bud’ clovekem, nebopocıtacovym systemem) a robot tento cıl autonomne plnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
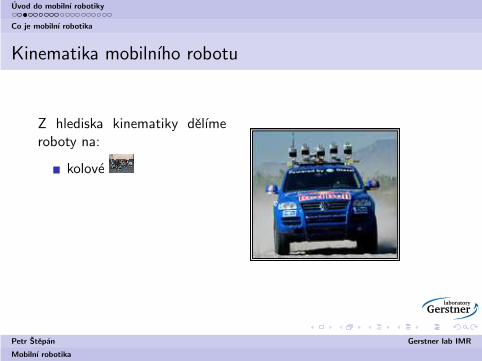
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
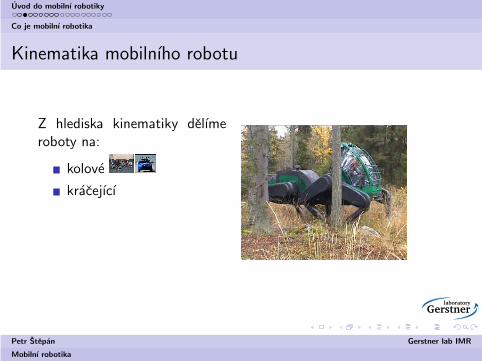
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
(pod)vodnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
(pod)vodnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
(pod)vodnı
hybridnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
(pod)vodnı
hybridnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Kinematika mobilnıho robotu
Z hlediska kinematiky delımeroboty na:
kolove
kracejıcı
letajıcı
(pod)vodnı
hybridnı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Architektura mobilnıho robotu
Rozdelenı rıdicıch systemu robotu podle architektury:
Reaktivnı systemy
Funkcnı dekompozice
Planovanı na vyssı urovni
Neuronove sıte a geneticke algoritmy
Hybridnı systemy
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Reaktivnı architektura
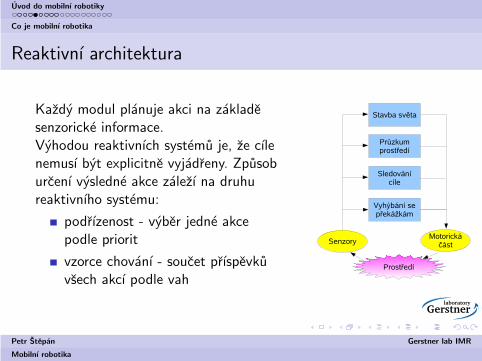
Kazdy modul planuje akci na zakladesenzoricke informace.Vyhodou reaktivnıch systemu je, ze cılenemusı byt explicitne vyjadreny. Zpusoburcenı vysledne akce zalezı na druhureaktivnıho systemu:
podrızenost - vyber jedne akcepodle priorit
vzorce chovanı - soucet prıspevkuvsech akcı podle vah
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Funkcnı dekompozice
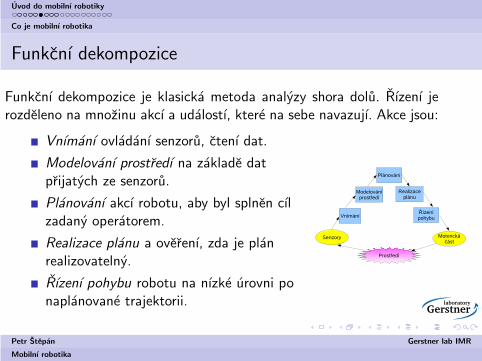
Funkcnı dekompozice je klasicka metoda analyzy shora dolu. Rızenı jerozdeleno na mnozinu akcı a udalostı, ktere na sebe navazujı. Akce jsou:
Vnımanı ovladanı senzoru, ctenı dat.
Modelovanı prostredı na zaklade datprijatych ze senzoru.
Planovanı akcı robotu, aby byl splnen cılzadany operatorem.
Realizace planu a overenı, zda je planrealizovatelny.
Rızenı pohybu robotu na nızke urovni ponaplanovane trajektorii.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Planovanı na vyssı urovni
Metody rızenı a planovanı akcı robotu zalozene na deklarativnıreprezentaci znalostı o svete. Mezi tyto prıstupy je razenoplanovanı akcı pomocı algoritmu STRIPS, vyuzitı jazyka PROLOG,nebo jazyku predikatove logiky 1. radu.
Deklarativnı prıstup k ukladanı informacı o prostredı je vhodnymzpusobem k planovanı cinnosti robotu. Vyznamne je jeho propojenıse symbolickou reprezentacı sveta, ktera je potrebna pro planovanına znalostech o svete.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Neuronove sıte a geneticke algoritmy
Pro resenı uloh, ktere je velmi slozite presne formulovat, nebopokud se jedna o ulohu patrıcı do skupiny NP-uplnych problemu,se casto pouzıvajı metody z oblasti soft-computingu.
Neuronove sıte prımo prevadejı vstupnı signaly do vystupu prorızenı robotu. Casto jsou neuronove sıte pouzity pro predzpracovanıdat z techto senzoru a jejich vystup pak slouzı ostatnım modulu krozhodovanı o dalsı cinnosti. Prıkladem muze byt rızenı rychlosti uvıtezneho tymu ze souteze Grand Challenge.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Co je mobilnı robotika
Hybridnı prıstup
Hybridnı prıstup je kombinacı vıse uvedenych prıstupu. V praxi setemer vzdy jedna o kombinaci vıce prıstupu, napr. kombinacereaktivnıho systemu se systemem funkcnı dekompozice. Pronektere moduly je vyuzito prıstupu soft-computingu, neuronovesıte, nebo geneticke algoritmy. Planovanı akcı robotu muzekombinovat proceduralnı planovace s deklarativnımi.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Aplikace
Soucasne aplikace mobilnıch robotu lze rozdelit:
slouzıcı roboti (service robotics) - doly, domacnost, kontrola,hasici, hlıdaci, pecovatele, pruvodci, stavebnictvı, zabava,zdravotnictvı, zemedelstvı
autonmnı auta, asistence pri rızenı
meziplanetarnı vyzkum
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
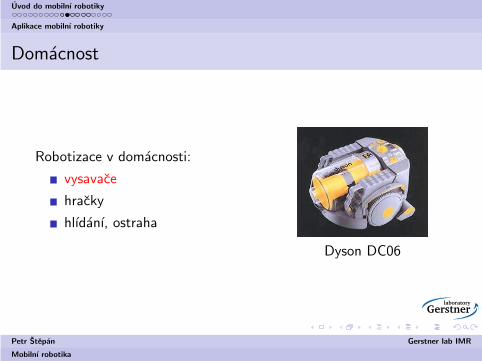
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Roomba iRobot 3 tKc
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Scooba iRobot 8 tKc
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Idd iRobot 11 tKc
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
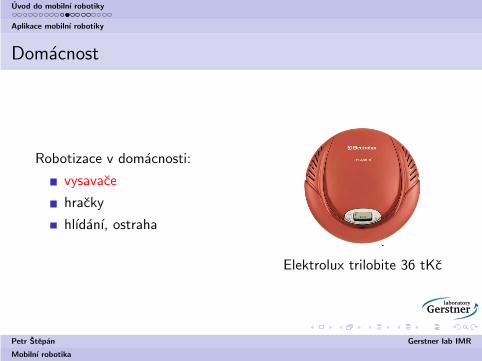
Elektrolux trilobite 36 tKc
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Dyson DC06
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
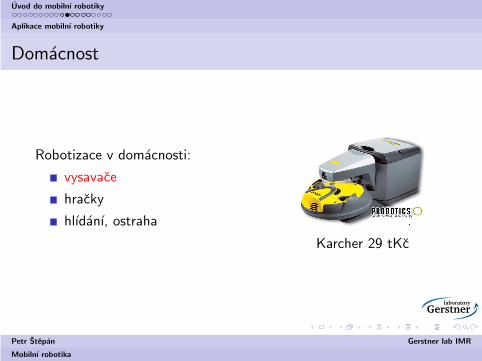
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Karcher 29 tKc
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostrahaSiemens Sinas cisticı stroj
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
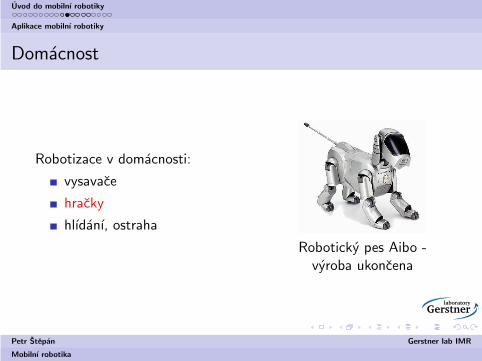
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Roboticky pes Aibo -vyroba ukoncena
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Humanoidnı robot Qrio -vyroba ukoncena
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Hracky na dalkove ovladanı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
White box - hlıdacı robot
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
PatrolBot - ostraha
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostraha
Spy-Cye domacı hlıdanı
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Domacnost
Robotizace v domacnosti:
vysavace
hracky
hlıdanı, ostrahaMOSRO1 - monitorovacı
system > 315 tKc
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Hasicske roboty
Firma 1. roboticka, s.r.o www.roboticka.cz vyrobila hasicskyrobot Broucek I
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
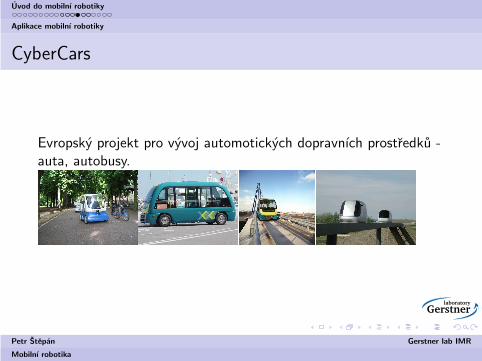
CyberCars
Evropsky projekt pro vyvoj automotickych dopravnıch prostredku -auta, autobusy.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Asistence pri rızenı
Assitence pri rızenı:
Adaptive Cruise Control ACC, radar nebo laser Audi, BMW, Cadillac,
Honda, Jaguar, Lexus, Nissan, Mercedes-Benz, Range Rover, Toyota, Volkswagen, Renault and Volvo.
Cena okolo 2000 USD
Collision Warning System CWS
LaneVue - udrzovanı jızdnıho pruhu
Detekce prekazky v slepych mıstech - hlavne nakladnı auta
Parking System - Park4U - VW Touran
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Asistence pri rızenı
Assitence pri rızenı:
Adaptive Cruise Control ACC, radar nebo laser Audi, BMW, Cadillac,
Honda, Jaguar, Lexus, Nissan, Mercedes-Benz, Range Rover, Toyota, Volkswagen, Renault and Volvo.
Cena okolo 2000 USD
Collision Warning System CWS
LaneVue - udrzovanı jızdnıho pruhu
Detekce prekazky v slepych mıstech - hlavne nakladnı auta
Parking System - Park4U - VW Touran
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Asistence pri rızenı
Assitence pri rızenı:
Adaptive Cruise Control ACC, radar nebo laser Audi, BMW, Cadillac,
Honda, Jaguar, Lexus, Nissan, Mercedes-Benz, Range Rover, Toyota, Volkswagen, Renault and Volvo.
Cena okolo 2000 USD
Collision Warning System CWS
LaneVue - udrzovanı jızdnıho pruhu
Detekce prekazky v slepych mıstech - hlavne nakladnı auta
Parking System - Park4U - VW Touran
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Asistence pri rızenı
Assitence pri rızenı:
Adaptive Cruise Control ACC, radar nebo laser Audi, BMW, Cadillac,
Honda, Jaguar, Lexus, Nissan, Mercedes-Benz, Range Rover, Toyota, Volkswagen, Renault and Volvo.
Cena okolo 2000 USD
Collision Warning System CWS
LaneVue - udrzovanı jızdnıho pruhu
Detekce prekazky v slepych mıstech - hlavne nakladnı auta
Parking System - Park4U - VW Touran
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Asistence pri rızenı
Assitence pri rızenı:
Adaptive Cruise Control ACC, radar nebo laser Audi, BMW, Cadillac,
Honda, Jaguar, Lexus, Nissan, Mercedes-Benz, Range Rover, Toyota, Volkswagen, Renault and Volvo.
Cena okolo 2000 USD
Collision Warning System CWS
LaneVue - udrzovanı jızdnıho pruhu
Detekce prekazky v slepych mıstech - hlavne nakladnı auta
Parking System - Park4U - VW Touran
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Aplikace mobilnı robotiky
Pruzkum vesmıru
Mars Rover - dvojice robotu Spirit a Opportunity pristala 5. a 24.ledna 2004 na Marsu.Roboty jsou vybaveny:
panoramaticka kamera
spektrometry
magnety na sber magneticky aktivnıho prachu
Rock abrasion tool - vrtanı a brousenı
roboticka ruka
Oba roboty pracujı a posılajı data jeste v soucasnosti.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Souteze
Souteze
Atraktivitu mobilnı robotiky zvysujı souteze:
fotbal - RoboCup, FIRA
zachranarske roboty - RoboRescue
Grand Challange - automobily
specializovane - Lego, Aibo, atd.
Petr Stepan Gerstner lab IMR
Mobilnı robotika

laboratory
Gerstner
Uvod do mobilnı robotiky
Souteze
Fotbal - RoboCup, FIRA
RoboCup fotbal plne autonomnıch robotu, ruzne kategorie maleneautonomnıroboty, strednı plne autonomnı roboty, AIBO,humanoidnı roboty
FIRA centralnı pohled na hriste a centralnı rızenı robotu
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Souteze
RoboRescue
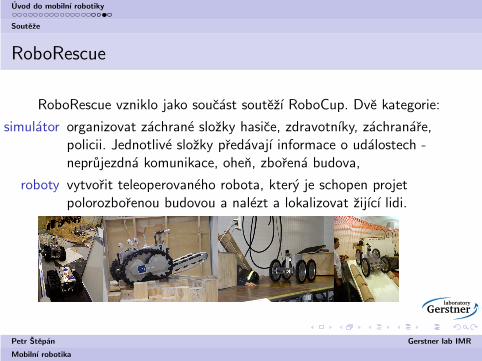
RoboRescue vzniklo jako soucast soutezı RoboCup. Dve kategorie:
simulator organizovat zachrane slozky hasice, zdravotnıky, zachranare,policii. Jednotlive slozky predavajı informace o udalostech -neprujezdna komunikace, ohen, zborena budova,
roboty vytvorit teleoperovaneho robota, ktery je schopen projetpolorozborenou budovou a nalezt a lokalizovat zijıcı lidi.
Petr Stepan Gerstner lab IMR
Mobilnı robotika
laboratory
Gerstner
Uvod do mobilnı robotiky
Souteze
Grand Challenge
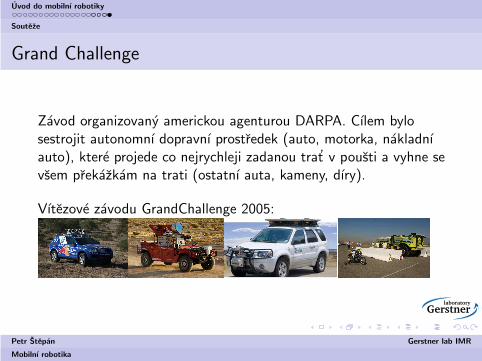
Zavod organizovany americkou agenturou DARPA. Cılem bylosestrojit autonomnı dopravnı prostredek (auto, motorka, nakladnıauto), ktere projede co nejrychleji zadanou trat’ v pousti a vyhne sevsem prekazkam na trati (ostatnı auta, kameny, dıry).
Vıtezove zavodu GrandChallenge 2005:
Petr Stepan Gerstner lab IMR
Mobilnı robotika




![µoıµ„o˚’ U „¡’ }’ „‰µ]ı˚ ı v] }’ ˚vı„˚ KªÙ˚ݪ°ªç ... · 2019. 2. 27. · µoıµ„o˚’ U „¡’ }’ ˙ „‰µ]ı˚ ı v] }’ ˚vı„˚](https://img.pdfslide.us/doc/110x75/6148f9779241b00fbd674270/oaoa-u-aa-a-aa-v-a-va-k.jpg)













![002 Tmkusuma2013 IT-012276 ROBOTIKA [Teknik Perancangan Robot]](https://img.pdfslide.us/doc/110x75/577cd0491a28ab9e7891d586/002-tmkusuma2013-it-012276-robotika-teknik-perancangan-robot.jpg)


![001 Tmkusuma2013 IT-012276 ROBOTIKA [Dasar-Dasar Robotika]](https://img.pdfslide.us/doc/110x75/577cd0591a28ab9e789205c1/001-tmkusuma2013-it-012276-robotika-dasar-dasar-robotika.jpg)







