Embed Size (px)
Citation preview

Mobility and Navigation
AME 470: Senior Design
ASME Bulk Material Transporter
Matt Bertke, Paul DeMott, Patrick Hertzke, Will Sirokman
23 September 2004

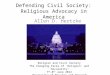
• Operator drives forward to first step; initiates phase 1
• Phase 1
• Treads lock
• Swing arm rotates to incline front of vehicle
• Swing arm locks
• Operator drives forward to step; initiates phase 2
Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
AutomationStair Climbing Algorithm
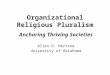
• Phase 2
• Treads lock
• Swing arm unlocks and rotates to the of vehicle
• Swing arm locks

• Operator drives forward to first step; initiates phase 3 simultaneously
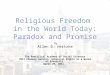
• Phase 3
• Treads unlock
• Swing arm rotates ccw and begins to lift rear of vehicle
• Swing arm locks in
When weight of vehicle is firmly no the next step, operator initiates phase 4
Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
AutomationStair Climbing Algorithm
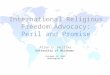
• Phase 4
• Swing arm unlocks and rotates clockwise; returns to starting position

Senior Design: Team Burja ____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________Stair Descent Process
(Non Automated)
•Vehicle descends stairs back first. Cushion from the treads dampens fall slightly.
•Swinging strut attached to the front of the vehicle assists second fall of front end.
•Edge of the tread clears upper step and strut swing into parallel with the top of the tread (held in position by a rubber stopper).
•Vehicle drives clear of the upper step completes the descent.
•System allows for a smaller series of controlled falls and ensures impact force distribution to the frame and not drive train.

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Key Issues Locomotion
•Optimizing Torque and Speed of Swing-Arm
•Swing-arm trade study
•Independent drive treads
•Independent treads minimize turning radius
•Tread material and size to maximize traction
•Motor trade study
•Arm position control
•Motor braking and actuation
•Arm wheel design

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Key Issues Power and Electronics
•Power supply
•Available battery power vs. motor requirements
•Power distribution
•Potential energy study
•Electronic Control
•Automation of ascent process
•Individual drive tread control
•Operator interface

Senior Design: Team
Burja _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Key IssuesStability
•Margin of error
•Vehicle dimensions
•Vehicle speed
•Variability in motor precision and control input
•Center of Gravity
•Positioning with and without grain load
•Motor, battery, and grain container positioning