Embed Size (px)
Citation preview

Advanced
Personal Dead-reckoning (PDR)
System for Firefighters
Presented by
Johann Borenstein Research Professor at the University of Michigan
29 years experience in GPS-free position estimation for mobile robots and pedestrians
Mobile Robotics Lab

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
If you like the GLANSER form factor
you’re gonna love ours

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
4.1
3”
(10
5 m
m)
2.64” (67 mm)
Multi-function
button
Battery test button
RadioLED
Batterytest
LEDs
AntennaIMU &
chargerport
4.1
3”
(10
5 m
m)
2.64” (67 mm)
Multi-function
button
Battery test button
RadioLED
Batterytest
LEDs
AntennaIMU &
chargerport
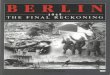
PDR Packaging
IMU is fully embedded in heel of firefighter boot.
IMU is easily transferable among boots of different firefighters.
Computer & battery kept in pouch on shaft of firefighter boot – no need to run IMU-to-computer cable up the firefighter’s leg.
Battery life: >3.5 hours.
Built-in connectivity:
• Bluetooth
• WiFi
• USB, RS-232
• 900 MHz consumer-grade radio

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
PDR Features
Eliminates effect of accelerometer drift with every step (ZUPT).
Uses our patent-pending Heuristic Drift Elimination (HDE)
algorithm to eliminate effects of gyro drift and other gyro errors in
buildings.
Does not require any user-specific calibration whatsoever.
Does not require setup of any infrastructure whatsoever on location.
Initialization at start of mission takes less than 8 seconds.
Demo/test at undisclosed military
test site in June 2012. Walk
included walking backward,
sideways, zig-zag, up and down
stairs, intentional walking in
arbitrary directions.
Return Position Error: ~3 m.

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
PDR Performance
Average heading errors: <1o in missions of unlimited duration!
Average position errors: <1% of distance traveled in walks >30 min.
Average elevation (Z-axis) errors: <1.5 m in walks of unlimited duration.
Works with running Errors ~2 x walking errors
Works with crawling on hands and knees, even up and down stairs Errors ~2-4 x walking errors
Works with users changing step-length or gait.
Works with users walking/crawling backward or sideways.
Battery life: >3.5 hours.
CCAT demo in January 2012
Included one lap each of:
Walking, running, crawling,
even hopping on one leg
Start End

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
What’s New since 2011 WPI PPL Workshop
Support for running
Improved accuracy during crawling
New Flexgain feature
Initialization time is now < 8 seconds (was 25 s)
New Adaptive Footfall Detection
Much greater accuracy
Much greater robustness
Latest News:
• Customer in Singapore purchased two PDR systems for testing with firefighters.
• PDR systems were delivered to customer on July 24, 2012, after three days of
acceptance testing by customer’s representative at our lab.

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Live Demo
“A picture is worth a thousand words” (unnamed wise man)
“A video is worth a thousand pictures” (Steven Spielberg)
“A live demo is worth a thousand videos” (Johann)
Initialization:
Stand still for 7+ seconds
Walk 8 steps in parallel to one of the walls of the building
Start Stop
Trajectory of live demo
walk/crawl performed during
this presentation.
Lap 1: walking
Lap 2: crawling
Return position error: ~1.2 m

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Summary
U of Michigan personal dead-reckoning (PDR) system
Two key features:
1. Removes drift from IMU’s accelerometers
2. Removes drift from IMU’s gyros
3. Work will every conceivable kind of legged motion, including crawling
Results:
Average position errors: <1% of distance traveled in walks >30 minutes
Average heading errors: <1o in walks of unlimited duration (at steady state, indoors, in >99.5% of buildings)
Two modes of elevation estimation (average Z-axis error: < 1.5 m)
The PDR system is ready for field testing and for integration
with other first responder systems.
We are seeking industry licensees for our technology

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Backup Slides The following slides are not part
of the oral presentation but may be
useful in the Q&A session

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Live Demo of Walk and Crawl at 2011 PPL Workshop
Presenter performed a live demo of a short walk and crawl
Trajectory of live walk (~50 m long).
RPE < 0.4 m (<1% of distance traveled) Trajectory of live crawl in continuation of the
walk. Total travel, ~85 m long. RPE <3 m (3.5%
of distance traveled)
Crawl
Walk
End of
walk, start
of crawl
Podium

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Most Recent Results (July 24, 2012)
Running

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Most Recent Results (July 24, 2012)
Crawling on
hands and knees

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Most Recent Results (July 24, 2012)
Crawling up
staircase

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
Dominant Directions in HDE Algorithm
The HDE algorithm is based on the concept
of Dominant Directions(DDs)
Two sub-sets: primary and secondary DDs
“Primary DDs” are those that one notices
immediately when looking at the floor plans of
most buildings, and they are usually the same
as the directions of the outside walls of the building.
Most corridors in buildings are parallel to primary DDs (see floor
plan to the right).
In rare cases corridors intersect with primary DDs at
angles of 45o. Those are called “secondary DDs.”
Typically, a walk with the PDR system must be
confined to just one building. That is because
the DDs must be the same throughout a walk.
If adjacent buildings have the same DDs, then a
single walk may stretch across all of these buildings. Floor plan of the conference center of an unnamed hotel. The general direction of the corridors is highlighted by thick red lines. The four primary dominant directions (0o, 90o, 180o, and 270o) are typically those that are parallel to the walls and main corridors of the building. Secondary dominant directions (45o, 135o, 215o, and 315o) intersect primary ones at angles of 45o.
0o
45o
90o
135o
180o
215o
270o
315o

Precision Indoor Personnel Location and Tracking for Emergency Responders, Worcester, MA, August 6-7, 2012
What’s New Since 2010 PPL Workshop, cont’d
Floorplan Mode
Allows incident commander to define regions that are not rectilinear